
摘 要:机载光电吊舱是挂于空中运动载体外部的一种动平台测控装置,利用光电探测系统实现对目标物的搜索、捕获,运动载体本身的运动导致自主捕获能力较弱,需要通过外导引信息辅助进行目标捕获。通过对外导引模式下目标捕获过程进行推导,根据GPS及直升机上的惯导系统给出直升机和目标相对于其惯性空间的位置以及直升机在其惯性空间的姿态角,通过坐标的转换把这些数据转换到吊舱平台坐标系的俯仰和偏航通道,进而控制俯仰力矩电机和偏航力矩电机,达到外导引辅助搜索目标的目的。对推论结果进行误差分析,分析过程和推论结果具有一定的工程实用性。
关键词:光电吊舱;外导引;坐标转换;目标捕获
0 引言
机载光电吊舱集CCD摄像机、中波红外热像仪、激光测距机等设备于一体[1],采用两轴陀螺稳定平台结构,实现光电探测器在直升机上对地面目标的侦查、搜索、跟踪,通常安装于武装侦察直升机、无人侦察机上,在对敌侦查、目标跟踪、光电制导武器模拟及电力巡线、海上缉私、环保监测等多方面应用广泛[2]。
机载光电吊舱在远距离小目标搜索过程中,受到CCD及热像仪视场角较小的限制,自主捕获目标能力较弱[3]。本文提出一种根据GPS及直升机上的惯导系统给出直升机和目标相对于其惯性空间的位置以及直升机在其惯性空间的姿态角[4],通过坐标的转换把这些数据转换到平台坐标系的俯仰和偏航通道,进而控制俯仰力矩电机和偏航力矩电机,快速地将吊舱光轴指向目标,实现光电吊舱快速捕获目标的目的。
1 机载光电吊舱的组成及工作原理
机载光电吊舱主要由CCD摄像机、中波红外热像仪、激光测距机等光电探测器,两框架陀螺稳定平台,数据处理及控制系统,隔振器等部分组成。光电探测器和俯仰陀螺安装在平台的俯仰框架上,光电探测器的光轴、俯仰陀螺的H轴相互平行,同时都垂直于俯仰框架的转动轴。俯仰框架通过轴承和俯仰力矩电机与偏航框架相连,俯仰力矩电机的转子与俯仰框架的转动轴固连,俯仰力矩电机的定子固连在偏航框架上;偏航框架通过轴承和偏航力矩电机与直升机相连,偏航力矩电机的定子固连在直升机上,偏航力矩电机的转子与偏航框架的转动轴固连;吊舱吊挂安装在直升机上。稳定跟踪平台主要用来隔离由于直升机本身的运动以及气流、直升机桨页旋转所引起的低频振动等对光电探测带来的角运动,消除直升机扰动对平台的影响,保持平台对空间位置的稳定;并可根据控制系统的命令,完成对目标的搜索、跟踪。
2 坐标转换
坐标系是空间数据的基准,不同的坐标系定义不同,转换方法也不同[3],本文的坐标转换流程如图1所示。
![]()
图1 坐标转换流程图
因为光电探测系统吊舱采用了两框架结构,力矩电机的定子和转子是抱死在一块的,飞机的运动必然会带入到系统之中,而且是在整个过程之中,不管是外导引,还是手动搜索、自动搜索、自动跟踪、稳定状态,飞机的运动也会带入到系统之中,所以都必须考虑飞机运动的影响[5]。
在光电探测系统的俯仰框架和偏航框架分别安装一个电位计,以提供需要归零时的角位移信号以及框架运动达到某一个预定值时对平台进行电锁定[6]。
光电探测控制系统原理方框如图2所示。
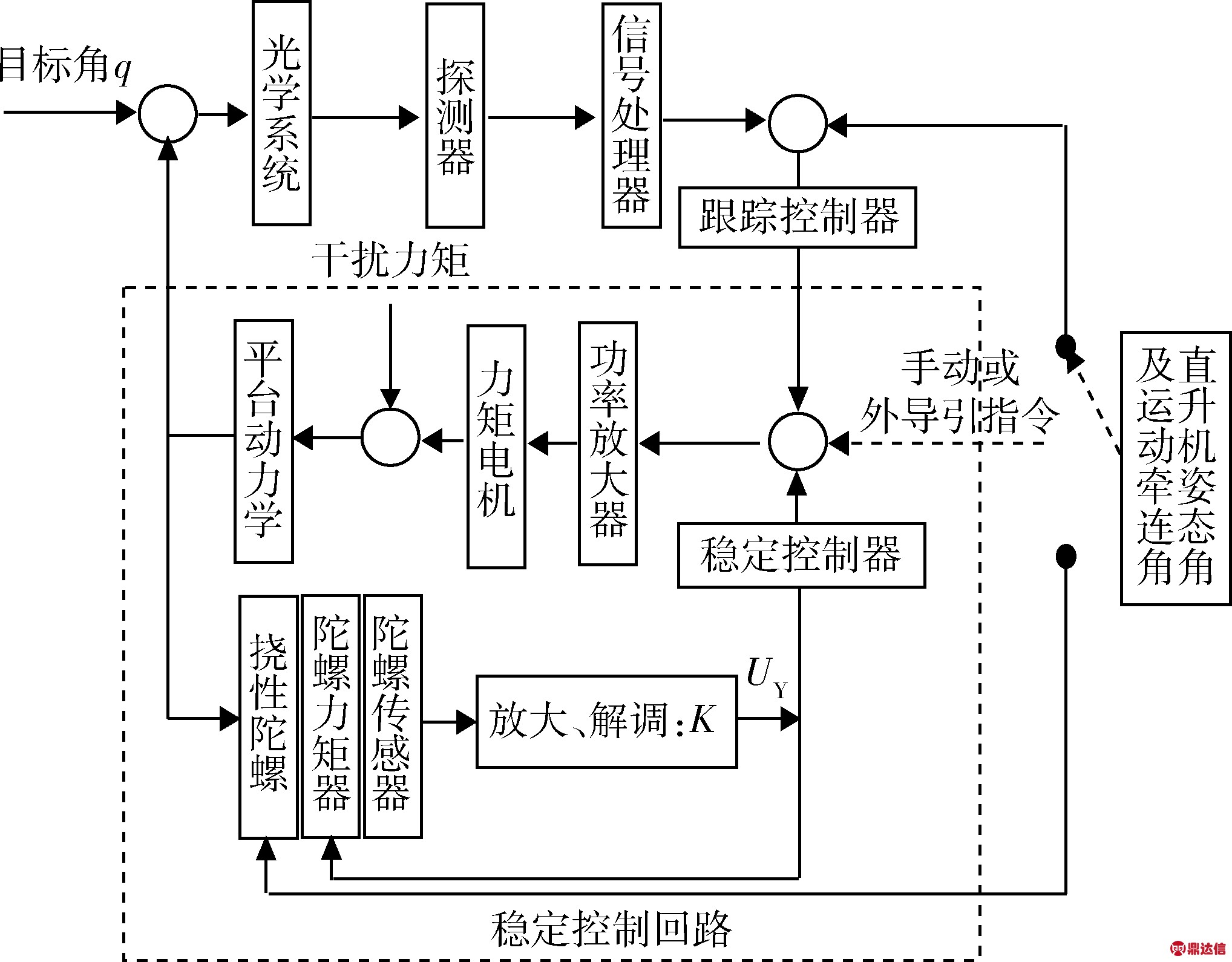
图2 光电探测控制系统原理方框
3 外导引运动分析
光电探测系统的跟踪稳定平台的主要任务是建立或模拟直升机机体坐标系并搜索目标,为此应做三件事:
(1)光电探测系统开始工作时,跟踪稳定平台坐标系必须与直升机机体坐标系相一致。即在跟踪稳定平台安装到直升机上时,使跟踪稳定平台坐标系调整到与直升机机体坐标系一致,并机械锁定;上飞机后,开始工作前,应实施电锁定。
(2)在初始对准的基础上,根据陀螺的信号指令对平台进行俯仰修正和偏航修正。使跟踪稳定平台与直升机机体坐标系始终保持一致,跟踪直升机机体坐标系,以消除由直升机角运动所引起的平台运动。
(3)光电探测系统开始工作时,根据GPS和直升机机上惯导系统给出的数据,可以计算出平台与目标之间在空间的相对位置关系,根据平台与目标之间在空间的相对位置关系,计算出要使探测器光轴对准目标需要对平台进行俯仰修正和偏航修正的量值的大小[7]。
假设,为了使光电探测器光学系统对准目标,稳定跟踪平台在俯仰、偏航方向的所应该偏转的角度设为Θ、Ψ。由以下的分析可知,Θ、Ψ受以下三方面影响:
①直升机和目标之间的相对位置的影响
先建立直升机和目标在的地理坐标系中的相对位置关系(X轴指东、Y轴指北、Z轴指天空),把直升机和目标当成质点看,其相互关系如图3所示,其中A点代表直升机,D点代表目标。
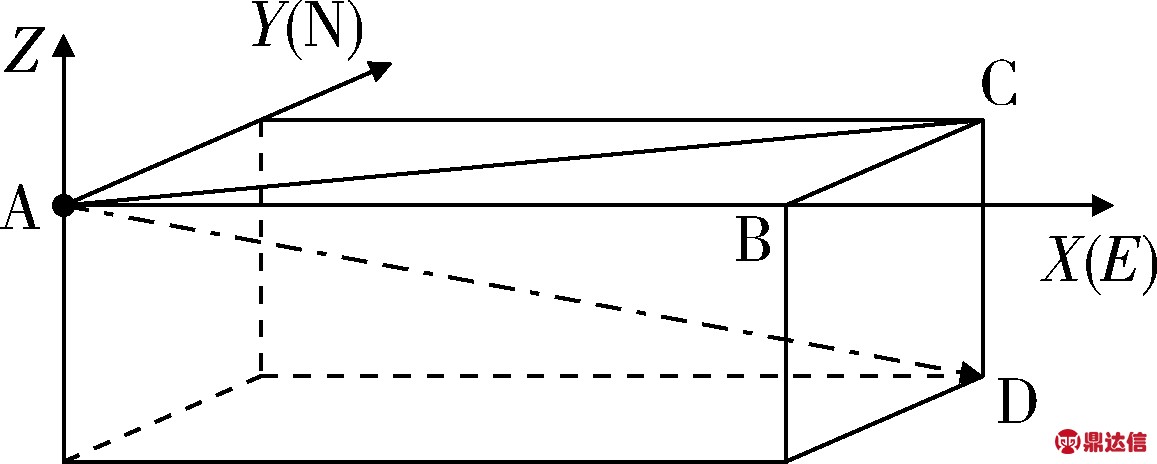
图3 直升机和目标在的地理坐标系中的相对位置关系
如果GPS只给出目标的三维位置数据,而不能直升机的三维位置数据,必须通过地心坐标系与地理坐标系的坐标转换(前面已经讨论过),把目标的三维位置数据转换到地理坐标系中的三维位置数据。
如果GPS能同时给出直升机和目标的三维位置数据[8],因为直升机和目标都同时随地理坐标系转动,所以只需关心直升机和目标之间的相对位置关系。
假设直升机与目标之间由地理位置所引起的俯仰、偏航角为XΘ、XΨ。当把直升机当成质点时,由GPS给出的直升机和目标在惯性空间的坐标(X1,Y1,Z1)和(X2,Y2,Z2),可以求出:
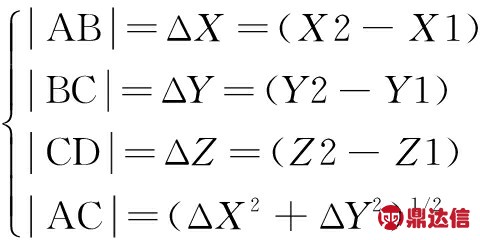
(1)
(2)
②直升机的姿态角θ、φ、γ的影响
直升机机体坐标系(OXcYcZc)与地理坐标系(OXtYtZt)之间的关系如图4所示。
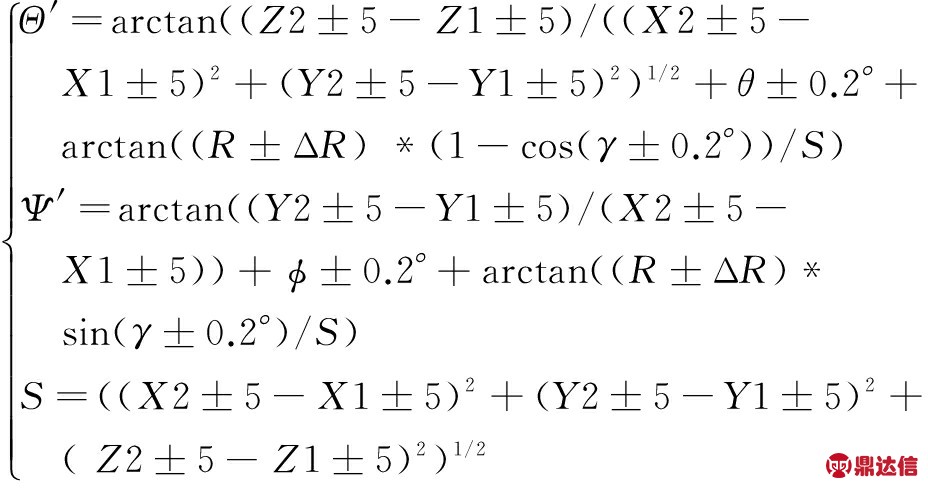
图4 直升机机体坐标系与地理坐标系之间的关系
在只考虑直升机对目标的瞄准过程中,可以不考虑直升机倾斜角γ的影响。只需把直升机的俯仰、偏航姿态角线性叠加:
XΘ+θ,XΨ+φ
由于平台坐标系的Xp轴与直升机的纵轴Xc轴不重合,直升机倾斜角γ将引起跟踪稳定平台在俯仰和偏航方向上的偏差。
因为跟踪稳定平台在俯仰和偏航方向上与直升机是固联的,可以计算出由直升机倾斜角所引起的平台在俯仰和偏航方向上角偏差θγ 和 φγ,如图5所示。
图5 俯仰和偏航方向上的角偏差
设稳定平台离目标的距离为S,稳定平台中心距直升机中心的距离为R,则:
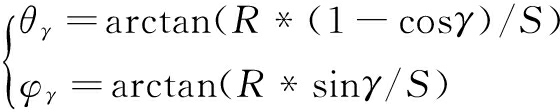
(3)
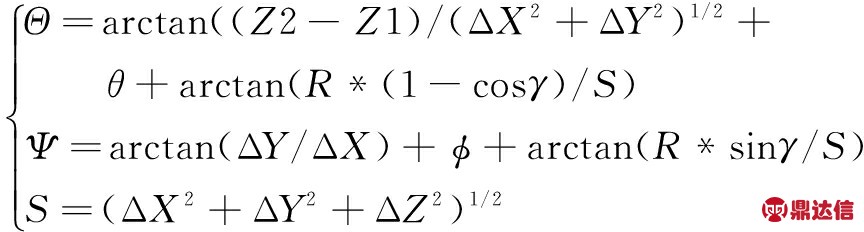
由以上分析可知,当直升机对平台进行外导引时,平台中央控制系统对平台伺服系统俯仰和偏航方向上给出的应偏转的角度为:
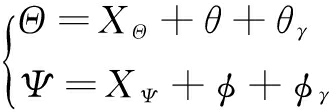
(4)
把上面分析所得的各项表达示代入式(4)可得:
(5)
4 误差分析
当平台处于外导引模式时,外导引误差由以下几部分组成:
(1)GPS外导引位置误差[9];
(2)直升机惯导系统给出的直升机姿态角误差[10];
(3)稳定平台安装误差(线误差、角误差)。
根据所提供的信息:GPS测量数据为X、Y、Z三维位置数据,坐标系为地心坐标系,位置精度≤5 m。数据更新率为20 c/s;惯性基准设备用于截取载机姿态角(俯仰角、倾斜角、航向角)、三维速度和角速率等信息,其中姿态角是以地面初始标校位置为基准。速度精度≤0.1 m/s,角度精度≤0.2°(2小时以内),数据更新率为40 c/s。
① GPS外导引位置误差
假设GPS给出的直升机和目标在地心惯性空间的坐标(X1,Y1,Z1)和(X2,Y2,Z2),其绝对误差分别为:ΔX1,ΔY1,ΔZ1和ΔX2,ΔY2,ΔZ2 ,根据所提供的数据:GPS在工作范围内,其在X、Y、Z向的误差不超过5 m,假设此5 m为绝对误差,则可以用下式进行运算:
(6)
②直升机惯导系统给出的直升机姿态角误差
假设直升机惯导系统给出的直升机姿态角的绝对误差分别为Δθ、Δφ、Δγ,根据所提供的数据:直升机惯导系统给出的在各方向的误差不超过0.2°,假设此0.2°为绝对误差,则可以用下式进行运算:
(7)
③稳定平台安装误差(线误差、角误差)
线误差:只考虑稳定平台在z方向的绝对安装误差ΔR,忽略稳定平台在x,y方向的绝对安装误差。则稳定平台的安装误差为R=R±ΔR;
角误差:假设稳定平台在俯仰和偏航方向上的角误差分别为Δθ′和Δφ′。
由于稳定平台的安装误差ΔR、Δθ′和Δφ′ 为一个固定误差,可以通过定标的方法进行标定,在(4)中引入一个固定量来进行运算。
也可以把它们作为变量引入到式(4)中,根据对Θ和Ψ的误差要求,反算出对ΔR、Δθ′和Δφ′的要求(ΔR可以通过γ转换到俯仰和偏航方向上的角误差)。
把上述分析的结果代入下面的方程组:

(8)
可得:
(9)
由此可求出在上述三种误差情况下,跟踪稳定平台在俯仰和偏航方向上的角位移误差分别为:
(10)由以上分析可知,当直升机靠近目标时,误差将显著增大。在上述三种误差情况作用下,跟踪稳定平台在俯仰和偏航方向上的角位移误差与直升机飞行航路设计有较大关系。由实际工作中的参数模型和概率论知识可知,这些误差大都服从正态分布或近似服从正态分布,用卡尔曼滤波或小波分析处理这些误差[11],可以得到更好的目标捕获精度。
5 结论
本文通过对外导引模式下目标捕获过程进行推导,根据GPS及直升机上的惯导系统给出直升机和目标相对于其惯性空间的位置以及直升机在其惯性空间的姿态角,通过坐标的转换把这些数据转换到平台坐标系的俯仰和偏航通道,进而控制俯仰力矩电机和偏航力矩电机,达到外导引辅助搜索目标的目的。对推论结果进行误差分析,分析过程和推论结果具有一定的工程实用性。


