
摘要:在对真空断路器动作特性受温度影响的研究中遇到了机械阻尼无法量化的问题,针对这一问题,提出了样机实验和ANSYS仿真相结合的方法对机械阻尼进行量化分析研究。通过对真空断路器进行温度实验,分析仿真与样机实验结果间的偏差,得到机械阻尼随温度的变化规律,并运用MATLAB拟合得到各温度下阻尼与行程间的关系公式。研究表明:断路器合闸动作初始位置处阻尼随环境温度升高单调减小,运动最终位置处阻尼随温度升高先减小后小幅增大,拟合所得机械阻尼与行程公式的系数与温度符合高斯分布。研究结果可为考虑温度影响的断路器研制设计提供指导。
关键词:温度实验;机械阻尼;误差补偿; 真空断路器
0 引言
工业生产中,开关动作的可靠性是重要技术标准之一。电容电压、环境温度等外界因素改变时,开关的动作分散性都会发生变化。环境温度会影响真空断路器内部构件的性能,进而变量参数会发生改变,导致操动机构的合闸动作时间变化。因此,在断路器永磁操动机构(PMA)的研制和应用中,研究人员对环境温度所引起的断路器动作特性变化的关注加大[1-5]。文献[4]研究了温度影响下断路器动作特性的变化,并通过控制电压实时调整动作曲线以满足同步需求,但研究注重整体没有深入研究影响因素对合闸特性的具体影响;文献[5]研究了电容电压、电容容量及线圈电阻对机构合闸特性的影响,但笔者认为温度对断路器整机产生的阻尼变化造成的合闸时间的不稳定性也非常关键。
本文在前人工作基础上,对单线圈永磁机构的动态运动过程进行ANSYS仿真建模,在以DSP2812为核心的硬件系统基础上,严格控制电容电压,将断路器整机放入高低温箱中改变温度,测量整机受温度影响的合闸动作参数。根据PMA温度仿真计算时,影响断路器永磁机构的诸多变量中仅整机的机械阻尼数值不可估量无法添加,提出了基于温度影响下的仿真偏差得到阻尼随温度变化规律的方法。为便于讨论分析,本文定义仿真合闸时间与样机合闸时间的差值为仿真误差。分析仿真误差随温度的变化规律,并对其进行补偿;对补偿结果进行拟合,得到合闸过程中机械阻尼随温度的变化规律,及各温度下阻尼与行程位置的关系。研究结果对工业生产中断路器样机的仿真研究和结构设计有一定帮助,并对断路器开关动作的温度补偿有指导意义。
1 温度实验
1.1 样机温度实验
1.1.1 实验样品和方法
实验对象为:一台以汝铁硼材料为永磁体的单稳态永磁机构真空断路器;标称值为22000μF的电解电容器。变温实验基于GB1984-2003髙压交流断路器标准中对于高温实验以及低温实验的规定进行。根据变温箱的实验温度规定和实验结果精度,对实验的温度节点设定[6]。定义实验中,高温温度为30℃、40℃、50℃低温温度为-40℃、-30℃、-25℃、-20℃、-10℃、0℃、10℃,常温温度为20℃。
实验方法:将电解电容和处于分闸状态的PMAVCB放入变温箱中,根据所需温度进行变温控制。实验对象达到热稳定后,给电解电容充电,使其两端电压升至240V;用单片机控制电容向机构线圈放电,实现合闸操作,应用传感器和开关机械特性测试仪得到合闸参数[7],每组实验重复5次,合闸时间取平均值。样机温度实验示意图如图1所示。
对机构估算,得其热时间常数T为0.5h;在实验经过4T时间后,可认为试品达到热稳定状态。本文每个温度节点的实验时间均为2h,即可认为试品已达到热稳定状态[8]。
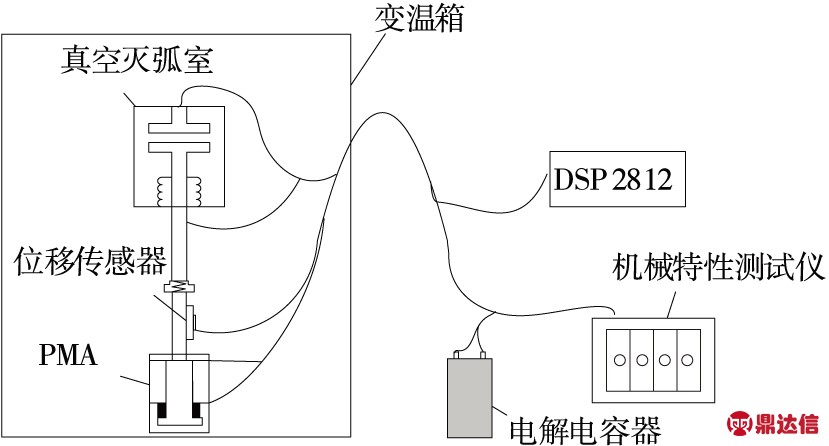
图1 样机整机温度实验示意图
1.1.2 实验结果
对不同温度节点下的PMA进行操动实验,得到合闸时间,如图2所示。
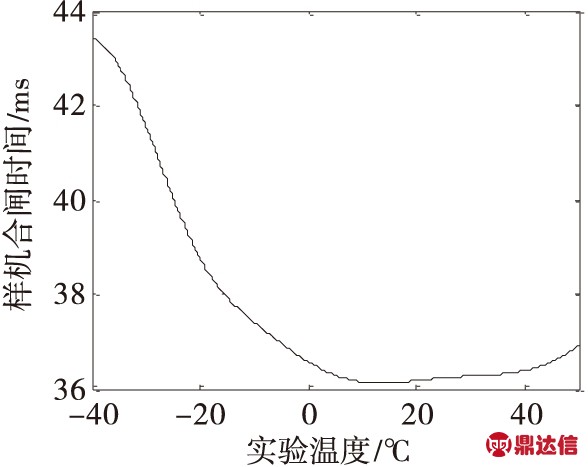
图2 样机温度实验结果
由实验数据可得,环境温度改变时PMA合闸动作发生变化,温度改变越多,合闸时间变化越大。低温下PMA合闸时间变化量比高温大得多。
1.2 仿真温度实验
1.2.1 仿真实验模型和方法
由PMA受温度影响的动态特性方程[9]可知,保持电压不变,影响PMA动作特性的参量有:电容容量、线圈电流、电磁系统全磁链、电磁吸力和机构反力。这些参量对应的具体变量为:电容容量、电容等效串联电阻(ESR)、线圈电阻、永磁体参数(剩余磁感应强度、内禀矫顽力)及反力(触头力、分闸簧反力、超程簧反力、机构和机构侧运动部件的重力及机械阻尼)。
由文献[10]可得到,各变量如电容容量、线圈电阻、剩余磁感应强度、内禀矫顽力,随温度的变化规律。ESR温度特性与电容器中电极、电解质和绝缘材料有关,随温度变化的曲线是电容器各部分材料温度特性曲线的叠加。其变化与温度呈负相关,随着温度降低ESR增大[11]。本实验所用电容,其ESR低温下最大值为0.35Ω。本文所用机构,灭弧室自闭力200N,分闸簧为17N/mm,超程1200N/2400N。
PMA的机械阻尼主要考虑粘滞和摩擦。其中,粘滞是由于动铁芯润滑剂受温度影响引起机构阻尼变化[12];摩擦主要为灰尘卡塞和运动部件与断路器其他部件间的接触摩擦。运动阻尼受温度影响规律难以测量,在仿真中无法设置。
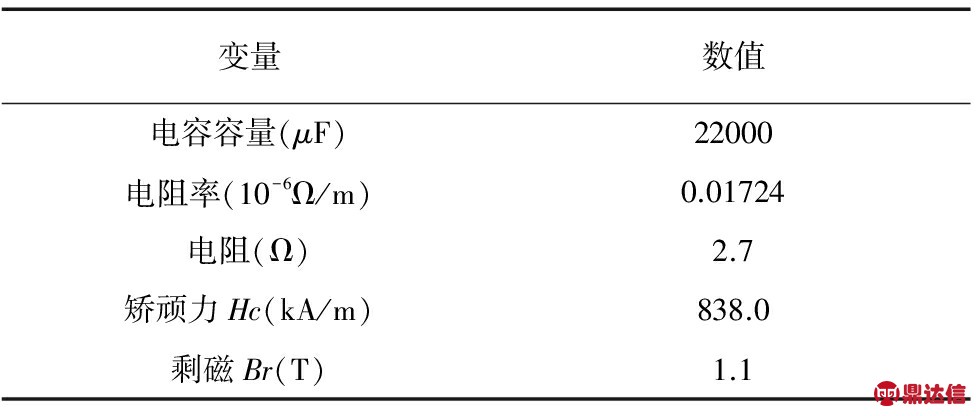
常温状态下,各变量的基本参数如表1所示。根据各变量随温度变化规律,计算其达到热稳定后的具体数值,进行各温度下的仿真参数设置,进行仿真计算。
表1 20℃时变量基本参数
1.2.2 仿真实验结果
由1.2.1小节中各参量仿真设置方法进行仿真,可得到模型在不同温度下的合闸时间,如图3所示。
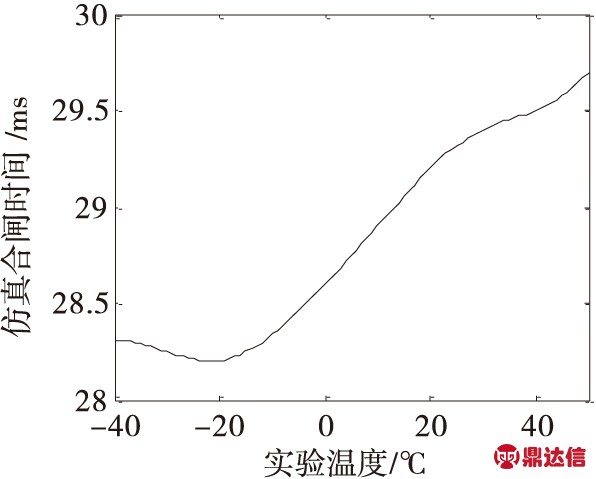
图3 仿真温度实验结果
可知,高温下合闸时间随温度增加而增大但趋势缓慢;低温下,合闸时间随温度降低先减小后增大。因为,各参量中,电容容量和线圈电阻随温度正相关变化,永磁体参数与温度呈负相关[13],而ESR在温度低于-20℃时影响比重迅速增大。
2 实验结果分析
本文中,定义仿真工作效率为仿真合闸时间与实验合闸时间的比值,用以表征仿真与实验误差的变化趋势。仿真工作效率与温度的变化曲线如图4所示。常温时仿真工作效率为80.72%,与实际经验相符(参考断路器分析经验,计算中一般取传动效率η=0.8)[10],确保了仿真结果的准确。
图4 仿真出力效率
由图4可知,在实验温度范围内,仿真工作效率随温度升高先增大后减小,即仿真误差先减小后增大。
2.1 仿真误差分析
对比样机和仿真实验结果,计算两者之间具体差值,得到仿真误差时间随温度变化曲线,如图5所示。
图5 仿真误差时间随温度变化曲线
由图5可知,低温下,温度在-10℃~10℃之间变化时,仿真误差变化缓慢;但温度低于-10℃时,仿真误差快速变化增大。由温度实验方法分析可知,仿真误差产生的主要原因是机械阻尼。由前文可知,永磁机构的阻尼主要考虑粘滞阻尼和摩擦阻尼。低温下仿真误差增大,可知阻尼对机构运动特性影响增大,机械阻尼对应反力单调增加。而高温下,仿真误差先减小后增大,可知阻尼反力先减小后增大。
但高温下线圈因素影响逐渐突出,机构阻尼相较低温状态偏小,因此高温状态仿真出力效率要比低温状态大。
2.2 仿真误差补偿
为定量分析运动阻尼随温度的变化规律,在仿真中引入了一个摩擦外力Ff。由于机械阻尼是与行程位置有关的变量,在仿真中调整摩擦力在分闸位和合闸位数值大小,保证仿真中机构始运动时间和合闸完成时间与样机一致进行计算。仿真计算得到了摩擦外力随温度变化结果,如图6所示。
图6 摩擦力随温度的变化曲线
(1)结果分析
由图5可知,低温合闸时,摩擦力随温度降低而增大,即阻尼单调增加,与仿真误差分析结果一致;高温下,摩擦力初始值随温度降低而减小,但摩擦终值随温度升高先减小后增大。
摩擦力初始值表征机构初始状态的阻尼,主要与粘滞和灰尘卡塞有关,由于粘滞作用随温度降低而增强,导致动铁芯所受的阻尼系数增大[14],所以摩擦力随温度降低而增大。摩擦力最终值是初始值与运动中摩擦力增量的叠加。它与多项摩擦因素有关,比如,①环境温度变化时,机构各部件材料热胀冷缩,但热膨胀系数不同,导致运动部件与机构其他部件间产生不同程度的“抱紧”产生的摩擦;②加工偏差,动铁芯在放置时与触头没有完全处于直线位置,产生了不必要的接触摩擦等。高温时,虽然粘滞作用减弱,但接触摩擦增加阻尼增大,所以摩擦力最终值50℃较40℃时大。
(2)数据处理
基于MATLAB对所得数据进行函数拟合,可得到摩擦力即运动阻尼与温度间的变化规律。
摩擦力初始值拟合公式:
F1(ϑ)=-0.50×10-3ϑ3+0.17ϑ2-13.51ϑ+1099
(1)
摩擦力终值拟合公式:
F2(ϑ)=0.81×10-3ϑ3+0.12ϑ2-13.17ϑ+1405
(2)
在仿真中,只考虑了摩擦力初始值和最终值,将运动阻尼随位置的变化进行了线性化处理,因此根据公式(1)和公式(2),可得到各温度下运动阻尼与行程位置的关系:
F(x,ϑ)![]() x-
x-
0.50×10-3ϑ3+0.17ϑ2-13.51ϑ+1099
(3)
根据公式(3),可以计算得到某一温度下某一行程位置的摩擦力。由公式可看出,运动过程中阻尼终值较初始值的增量与温度的变化规律符合高斯分布。实际中,机械阻尼与位置的关系复杂,接下来工作中笔者将会通过各位置点的时间补偿来得到阻尼值,得到机械阻尼与位置间的精确关系。
同型号的永磁机构断路器,由于工艺等原因会导致阻尼初始值不同,但阻尼随温度的变化规律是基本一致的。例如,一台断路器样机仅在常温状态下进行合闸试验,结合仿真利用本文所述即可得到阻尼值,之后依据本文所得结论,可以考虑环境温度的选相操作温度补偿等。本文中,样机实验所得断路器合闸时间受温度影响的变化规律,可为永磁机构真空断路器的操动机构设计提供指导。
3 结论
综合温度实验和仿真实验的结果分析,可得出如下结论:
(1)仿真误差会受到环境温度的影响,随温度升高仿真误差会先减小后增大,30℃时误差最小为6.87ms。低温时仿真误差要比高温时的仿真误差大得多。-40℃时仿真误差比常温下增加了114.06%。
(2)仿真误差的补偿,以合闸运动的始动和完成时间与样机结果一致为原则,将摩擦力(运动阻尼)随温度的变化关系线性化处理,得到各温度下阻尼初始值和最终值。其中,阻尼初始值随温度升高而单调减小,最终值随温度升高先减小后小幅增大。
(3)基于MATLAB对机械阻尼初始值和最终值随温度的变化规律进行分析,可得到各温度下阻尼与行程位置间的变化规律公式,所得公式斜率即运动过程中阻尼增量与温度的关系符合高斯分布。
本文研究了仿真误差和机械阻尼随温度的变化规律,能够为虑及温度影响的断路器永磁机构仿真设计及选相操作温度补偿提供依据,提高设计精度和仿真软件的应用可靠性。今后的研究工作中,笔者将对多种类别的PMA进行温度实验研究,得到不同类别 PMA仿真误差间的区别与联系及导致机构间机械阻尼差异的因素,为样机研制中仿真设计的可靠应用提供帮助。


