
摘要:文章设计并研制了8英寸硅片真空传输平台,介绍了该传输平台的整体结构,并对关键模块前端传输腔室VCE中的CTA传输手托盘系统进行了选型设计、机构分析。垂直升降系统采用丝杠传动,CTA传输手采用平面四连杆机构增大刚度。对传输手主动杆强度和变形量进行了有限元仿真分析。经过重复运行精度实验测试,整个平台达到了硅片制造要求。
关键词:硅片;真空传输;有限元
0 引言
20世纪90年代以后,随着半导体产业的飞速发展,机械自动化技术也被引入到半导体制作的过程当中[1]。半导体产品在制作中往往需要研磨机、抛光机、光刻机、划片机等独立的工艺制造单元,同时需要传输系统将硅片在各个独立的工艺制造单元进行传输和定位[2]。为了确保硅片在不同的工艺工位之间快速、准确、可靠地传输,传输系统的自动化程度和可靠性显得十分重要[3]。与此同时,应该对设计研发的硅片传输系统在运动特性、反应灵敏性、运动准确性以及工作稳定可靠性等方面提出较高的要求[4]。目前少量的大学及研究所在进行相关的科学研究,如结构优化设计[5]、轨迹规划[6]、安全保护[7]等。
本文以研制具有自主知识产权的硅片真空传输平台为目标,着重探讨了VCE系统中传输手及托盘系统(Cassette Transfer Arm,CTA)的结构设计。从保证重复运动精度性考虑,设计真空腔室片盒升降装置系统以及CTA传输手,并进行实验测试。该硅片传输真空平台具有模块化和高集成度的特点,减少了装配、调试和后期维护过程中对洁净度乃至对加工产品合格率造成的影响。
1 硅片平台整体结构方案
1.1 平台结构构成
如图1所示,本文研制的硅片传输平台由五大模块组成,分别为真空腔室片盒升降装置模块、末端真空传输腔室模块、真空直驱手模块、预对准模块和底部支撑框架模块,其中前端真空腔室片盒升降系统又分为结构相同的左右两个腔室,五大模块在结构上各自独立,按照结构功能进行组装,这样的模块化设计大大降低了设备的加工、装配难度,尽可能的减少设备工作过程中对洁净度和真空度的影响,同时也降低了调试和后期维护的成本。
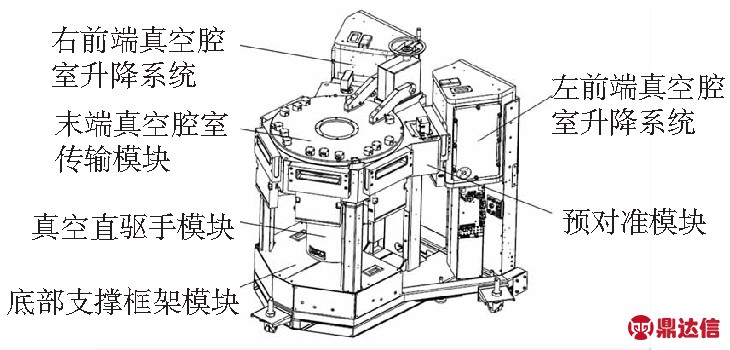
图1 传输平台整体结构图
本平台的工作过程如下:待处理的硅片放置于硅片盒(待加工片盒)当中,由真空直驱手从左侧真空腔室片盒升降装置取出,送入预对准模块中进行对准,之后再由真空直驱手从预对准装置将其取出放入到末端真空传输腔室中,等待后续的加工处理,加工处理完成后,再通过真空直驱手拾取,放入到右侧真空腔室片盒升降装置的硅片盒(加工完成片盒)中,仪器复位,完成一次传输过程。
图2为真空传输平台的俯视图,可以看出本传输平台采用的是集束式的传输结构[8],主传输腔形状为蛙腿式,出片盒左VCE腔室和收片盒右VCE腔室分别位于两个相邻支腿处,其他的支腿处可根据需要安装相应的加工单元,末端真空腔室的真空直驱手根据提前编辑好的程序进行传输路径规划,实现硅片在硅片盒体和加工单元之间的传输。此类结构具有结构紧凑,传输效率高和易于实现高洁净度的特点。
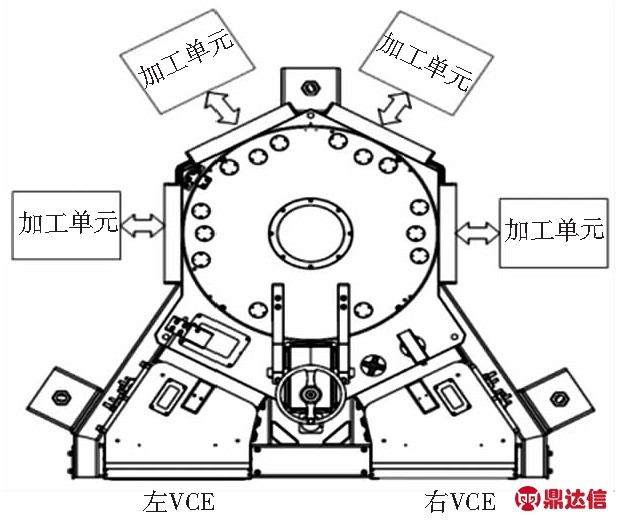
图2 传输平台俯视图
在传输过程中,前端真空腔室片盒升降模块作为硅片加工处理前后的储存单元,其稳定性和精度对传输过程有很大的影响,本文设备中的硅片盒放置于CTA 传输手之上,CTA整体置于升降系统装置之内,从而实现硅片盒的上下升降运动,同时CTA传输手一侧与旋转系统装置相连,可带动CTA传输手中的连杆机构实现一定的轨迹姿态,进而对硅片盒的平面位置进行定位,满足硅片传输过程中对硅片盒的取放位置要求。
1.2 真空腔室片盒升降装置结构构成
VCE传输腔室系统由VCE传输腔室、自动开关门装置、CTA传输手及托盘、CASSETTE真空升降装置、CASSETTE真空旋转装置、真空系统和充气系统组成,VCE真空传输腔室系统示意如图3所示。
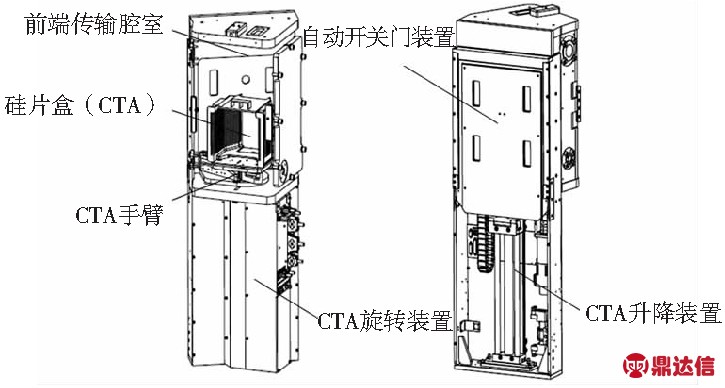
图3 VCE传输腔室系统结构图
2 VCE腔室关键件选型及仿真设计
CTA传输手作为VCE腔室当中的移动执行部件,整体安装在真空旋转装置之上,通过与之连接的Z轴滚珠丝杠实现上下的垂直运动,同时添加连杆机构实现硅片盒的平面运动,二者的结合就可以实现硅片盒的整体移动。
2.1 CTA传输手垂直升降系统关键部件选型校核
本文研制的升降系统采用的是滚珠丝杠的传动方式,具有传动平稳、精度高等特点。其中滚珠丝杠的选型是十分重要的环节[9],系统对硅片盒CTA的重复定位精度为0.1mm/300mm,所以选择的滚珠丝杠必须满足此要求。本文选择了THK公司带有球保持器的精密滚珠丝杠,其精度等级为C5,可达到0.1mm/300mm 的运行误差,与此同时,该滚珠丝杠可垂直使用,轴向载荷作用于一个方向,所以轴向间隙并不会对行程造成影响。
根据螺母长度100mm,丝杠轴末端长度100mm以及行程长度250mm确定整个丝杠轴的长度为450mm,驱动电机的额定转速Nm为3000/min、最高速度为Vmax为0.05m/s,滚珠丝杠的导程Ph计算如下:
Ph=![]() ·
·![]() =
=![]() ·
·![]() =0.5mm
=0.5mm
此可确定导程需0.5mm,另外,滚珠丝杠和马达之间用同步带轮进行减速,减速比2,滚珠丝杠导程选择10mm,根据上述条件及丝杠的安装空间选择丝杠轴直径为20mm,导程为10mm。
2.2 CTA传输手水平运动连杆机构分析
2.2.1 CTA传输手平面四杆机构建立
VCE腔室当中的CTA传输手不仅可以实现上下的垂直运动,还可以对自身姿态进行一定角度的调节,针对应用于真空洁净的环境,本文选择了结构简单可靠性高的四连杆机构来实现这一功能,同时四连杆机构可增大刚性,减少自由度,节约成本[10],图4为四连杆机构简图。
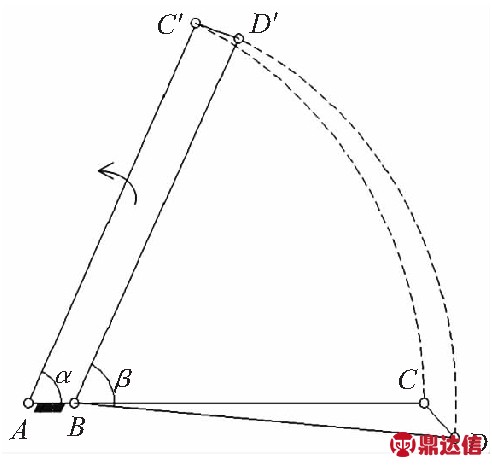
图4 四杆机构设计简图
根据四杆机构原理[11],结合VCE腔室结构,经计算取机架AB=33mm,主动杆AC=285.8mm,从动杆BC=275.7mm,连杆CD=32.5mm,主动杆旋转角度α=64.5°,可实现硅片盒按上图轨迹移动,首先对CTA传输手的连杆机构将进行分析以满足CTA对位置移动所需的要求,CTA传输手系统设计为由大臂、主动连杆、从动杆、CTA托盘、主动连杆挡块、连杆辅助支撑板构成,其中连杆辅助支撑板为固定杆,CTA托盘为连杆与主动连杆和从动杆共同组成四杆机构。
大臂固定在升降系统之上,主动连杆与旋转系统通过连接轴连接,二者之间采用键连接,使其能够随着转动轴进行转动,即可以实现旋转系统对于主动连杆的转动控制;从动杆的一端通过螺纹固定在主动杆上,另一端开孔与固定于CTA大臂之上的固定轴相配合,从动杆和固定轴之间安装有轴承,可自由的沿其固定轴进行转动。
图5为CTA传输手的运动姿态图,左图表示的是硅片盒处于VCE腔室当中的工作状态,右图表示的是传输手运动将硅片盒送出VCE腔室时的工作状态。当硅片盒装满硅片,需要从VCE腔室中取出,这时VCE系统模块中的旋转系统带动主动杆沿逆时针旋转,从动杆配合其维持轨迹姿态,到达指定的装卸位置。
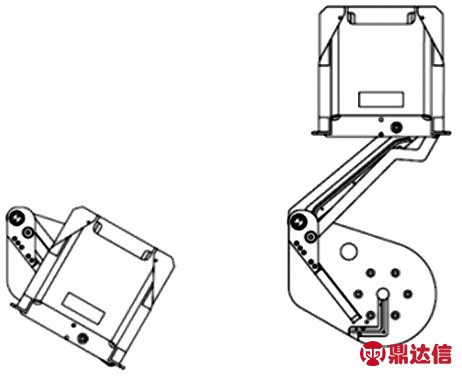
图5 CTA传输手运动姿态图
2.2.2 CTA传输手形变分析
上一小节中设计的CTA传输手,主动杆和从动杆为细长的悬臂梁结构,在CTA传输手运行过程当中,两个杆的末端受到硅片盒及安装基座重力所致的向下压力,这个压力会造成两个杆产生形变,进而影响CTA传输手的运行精度,掌握他们的形变量情况是十分必要的,其中主动杆承受绝大部分的重力,所以单独对其进行受力分析。
根据CTA传输手的运行方式,可以确定当其完全伸展开将硅片盒输送到VCE之外时,主动杆的形变量最大。本文是在Solidworks软件当中利用Simulation插件对主动杆进行有限元分析,首先建立连杆的简化模型,硅片盒和底盘当做一个整体负载,总重为6.2kg,即产生60.76N的压力,将其作用在主动杆的末端安装孔,主动杆的另一端进行固定约束,之后按照系统推荐的参数进行四面体网格划分,运行得到结果如图6和图7所示。
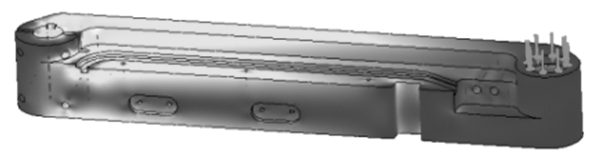
图6 主动杆受力后应力图
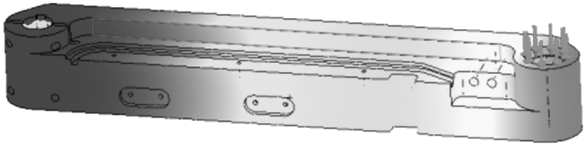
图7 主动杆受力后位移图
从图中可以得出,受力后的主动杆最大应力出现在靠近销孔的折弯处,大小为5.207×106 MPa,本文主动杆的材质为镁铝合金6061-T6,其屈服极限为2.750×108 MPa,所以主动杆在材料的强度上是满足要求的;我们比较关注的最大形变位移为0.046mm,可以满足在系统的运行精度。同时本文设计的CTA传输手最大负载重量为9.1kg,相应的仿真结果为:主动杆最大应力为1.008×107MPa,相比3.3kg负载增加了约一倍,但仍远小于材料的屈服极限,满足强度要求;最大形变量为0.089mm。两组仿真得到的形变量数据也可以用来指导硅片盒装卸的软件编程,对硅片盒的装卸装置进行定位修正。
3 VCE关键参数测试
本文对VCE腔室中传输手的Z轴垂直精度以及X轴水平精度做了测试验证,目的是确保CTA传输手的重复运动精度能够满足使用要求,Z轴具体的测试步骤如下:
(1)启动工控机中的上位机程序,设置Z轴上下移动的速度;
(2)将千分表置于VCE托盘运动极限位置底侧,使托盘压下千分表表针示数2~3mm,拨动磁性座旋钮固定好,千分表清零;
(3)打开测试程序软件,用数据线连接千分表与上位机;
(4)在测试程序中,于测试位置触发指令前后,分别加入1s、4s的延迟,启动程序自动运行;
(5)记录测试结果。
水平X轴的测试方式与Z轴大致相同,在这里不在具体的阐述,两个方向的测试数据如表3所示。
表3 Z轴与X轴重复度测试结果(单位:mm)
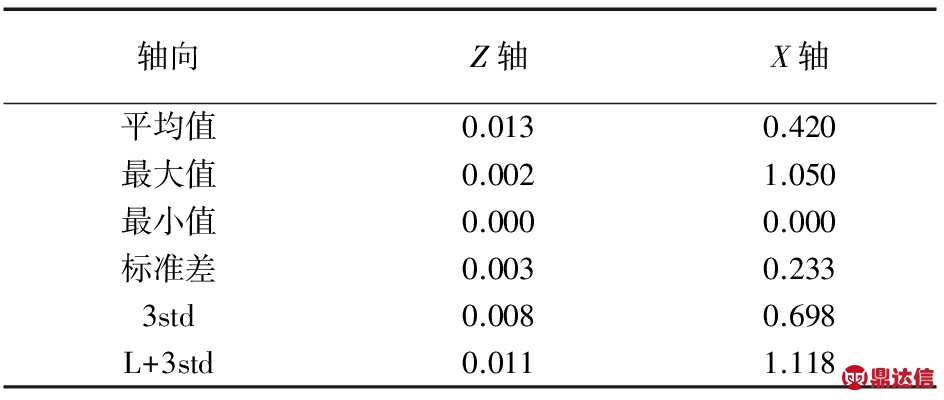
从表中我们可以看出,第二节当中选型设计的Z轴重复精度表现优秀, 3std误差为0.008,满足使用要求,与此同时X轴的水平重复精度3std误差为0.698,因水平精度要求较为宽松,同样可以满足使用要求。同时本文对VCE传输手满载情况的运行状态也进行了定性测试,测试步骤如下:
(1)将硅片盒取下,硅片盒的所有层均叠片布置,共计盛装50片硅片,将其整体置于电子秤上称重,记录重量信息;
(2)装满了硅片的硅片盒重新安放于CTA传输手之上,在上位机当中启动程序,控制其CTA传输手进行伸缩运动;
(3)运动过程中,需保证硅片无滑动。
测试结果显示:当硅片盒中装满硅片时的满载质量为3.3kg,在测试过程中,VCE腔体系统整体运行良好,这说明本文设计制造的CTA传输手系统可以满足使用要求。
4 结论
本文介绍了国内首台自主研发的8英寸硅片真空传输平台的基本结构,并重点分析了前端VCE传输腔室。该传输平台采用丝杠传动实现了VCE的升降功能,提高传动精度,采用平面四连杆机构增大CTA传输手的刚度。最后对VCE腔室的重复运行精度进行了实验测试,其垂直Z轴、水平X轴的重复度3std误差分别为0.008mm和0.698mm,均满足硅片制造要求。


