
摘要:在自动化控制领域内,PID控制器具有结构简单、容易实现、控制效果好等特点,是迄今为止最稳定的控制方法。高真空镀膜机的温度控制在镀膜过程中起着十分重要的作用,控制温度的精准与否将直接影响空间用太阳电池成膜质量,研究了PID算法的原理和实现方法,将其应用到真空镀膜机温度控制系统中,并且摸索出相应参数整定的方法规律,可以满足工艺所需要的各种温度。
关键词:PID温度控制;参数整定;真空镀膜机
当前普遍采用真空镀膜机来完成空间用太阳电池的金属电极及介质膜制备工艺。在此过程中,根据产品需要,真空镀膜机的加热灯会对腔体内加热升温,其温度控制系统就采用了PID算法控制。其控制系统包括:给定值为镀膜机设定的加热温度,控制器为PID控制器,执行机构为加热灯的功率电流调节器,控制对象为加热灯功率电流,传感器为热电偶,被控量为测量温度,系统图如图1所示。温控器PID参数未调整协调,设定加热温度为140℃,可是超温至160℃,如图2所示。造成了温度严重超调过冲,工艺时间增长,降低设备自动化程度,增加人工辅助操作,降低了生产效率,更重要会造成电池性能品质的不一致。

图1 真空镀膜机温度控制系统图
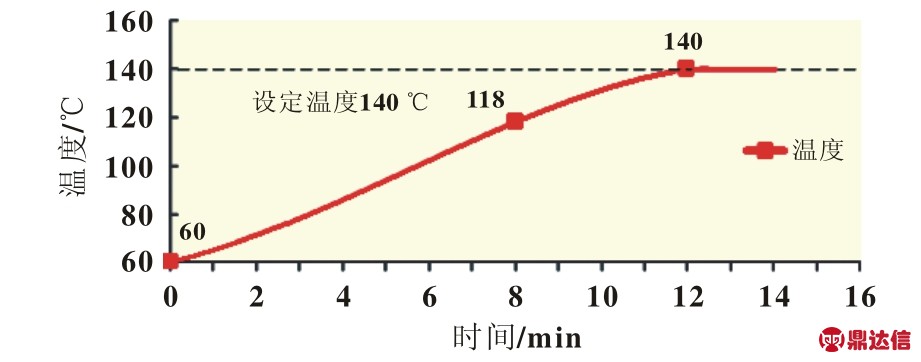
图2 温度曲线图
本论文主要研究真空镀膜机温度PID参数整定方法,最终使真空镀膜机温度控制参数整定完善,加热温度快速稳定准确地达到设定值,以满足工艺要求。
1 真空镀膜温度控制的主要参数
本文主要针对真空镀膜温度控制进行分析,其主要调节技术参数:设定温度;比例参数;积分时间;微分时间;加热灯输出功率。
2 PID控制的原理
PID控制器(比例-积分-微分控制器),由比例单元、积分单元和微分单元组成,其真空镀膜机温度PID控制原理框图如图3所示。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
其系统传递关系式如式(1)所示[1]:
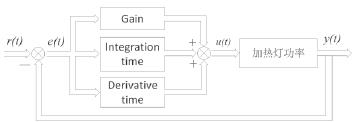
图3 PID控制器结构框图
式中:e(t)=u(t)-y(t),Kp为比例系数;Ti为积分时间常数;Td为微分时间常数;其系统传递函为式(2):
3 整定温控器PID控制参数
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。在此使用现场经验整定法调节PID参数[2]。
原参数Gain:25%,Integration time:0 s,Derivative time:0 s,Zone:90%。温度设定值为140℃,如图2。此时的参数只有比例增益Gain发挥作用,没有积分、微分作用,只是比例调节系统。针对这种现象分析调整各个参数。
3.1 分析Zone参数
Zone参数范围是0~100%。原参数Zone将近满负荷运行,长期这样运行会对设备造成疲劳性损伤。一般情况下真空镀膜机的加热最大温度为350~400℃[3],现在试验温度为140℃,相比之下属于偏低的温度,Zone不宜设置过大。Gain为25%,Integration time为0 s,Derivative time为0 s,Zone参数分别设置为70%、50%、30%,温度曲线图如图4所示。Z:70%曲线温度升温很快,但是随后温度过冲严重,总共32m in才稳定于设定值;Z:50%曲线升温较慢,略有过冲,30m in稳定于设定值;Z:30%曲线升温非常缓慢,共用23m in升温至最高值136℃,始终未到达设定值。
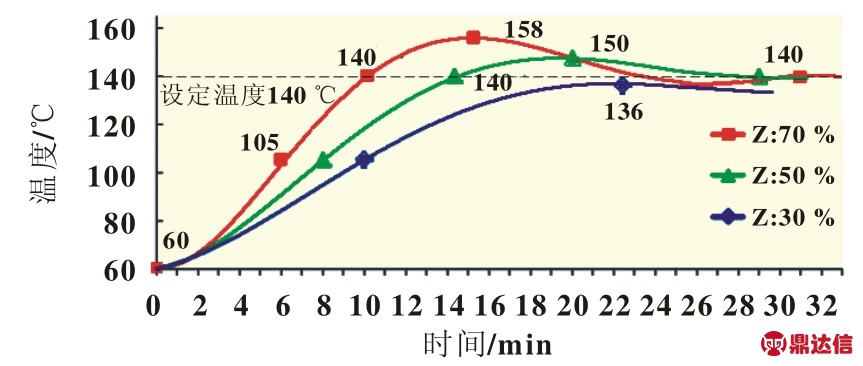
图4 不同Zone参数的温度曲线图
说明Zone参数用于调节加热灯输出功率。Zone参数过大时,升温迅速,温度过冲,调节时间过长;Zone参数过小时,升温缓慢,温度会不能达到设定值。
3.2 分析Gain参数
Gain参数范围0~100%。Zone参数为30%,Integration time为0 s,Derivative time为0 s,Gain参数由小到大调节,Gain参数分别设置为25%、30%、50%,温度曲线如图5所示。G:25%曲线升温缓慢,最终没有到达设定值140℃;G:30%曲线升温时间共用18m in,而且可以稳定在设定值上,没有过冲;G:50%曲线升温时间略有缩短,可是温度过冲至150℃,调节时间增加31m in。
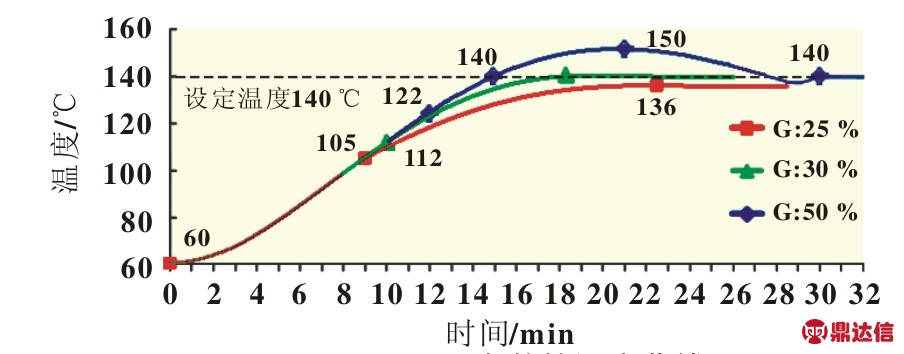
图5 不同Gain参数的温度曲线图
说明随着Gain数值增大,加强系统的反馈作用,加快了升温速度,但是会逐渐增大过冲值,产生误差。调节方法由小至大,出现过冲时,Gain参数即可。
3.3 分析Integration time参数
Integration time参数范围0~5 000 s。Zone为30%,Gain为30%,Derivative time为0 s,Integration time参数分别设置为4 000、2 000、500 s,温度曲线如图6所示。I:4 000 s曲线温度升温缓慢,共用时19min,可保证温度非常平稳;I:2 000 s曲线升温加快,误差增大,调节时间变长;I:500 s曲线升温迅速,过冲超调量增大,共用23m in稳定于设定值。
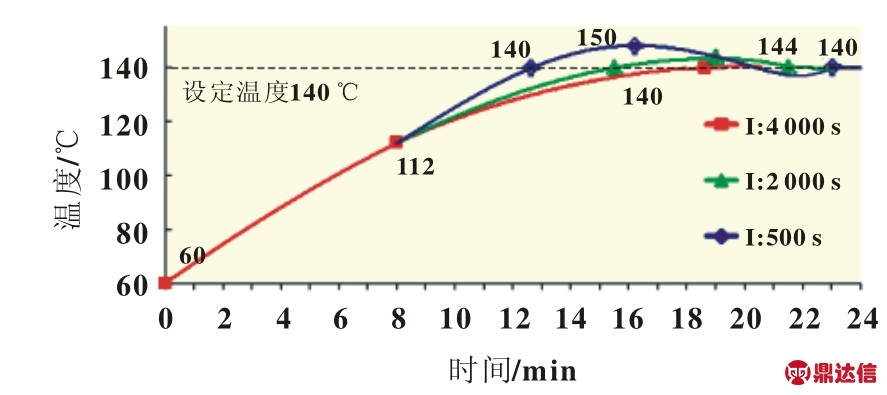
图6 不同Integration time参数的温度曲线图
说明Integration time参数较大时,升温缓慢,温度逐渐趋近于设定值,消除稳态误差,满足工艺需求;当参数过小时,升温迅速,但是温度过冲严重,调节失控,极度危险。调节方法参数由大至小调整,无稳态误差即可,而且不可过小。
3.4 分析Derivative time参数
Derivative time参数范围0~1 000 s。Zone为30%,Gain为30%,Integration time为4 000 s,Derivative time参数分别设置为5、50、200 s,温度曲线如图7所示。D:5 s曲线升温时间共用16min,并且稳定于设定值;D:50 s曲线升温加快,出现温度过冲及震荡现象;D:200 s曲线温度过冲更加严重,调节时间共用28min稳定于设定值。
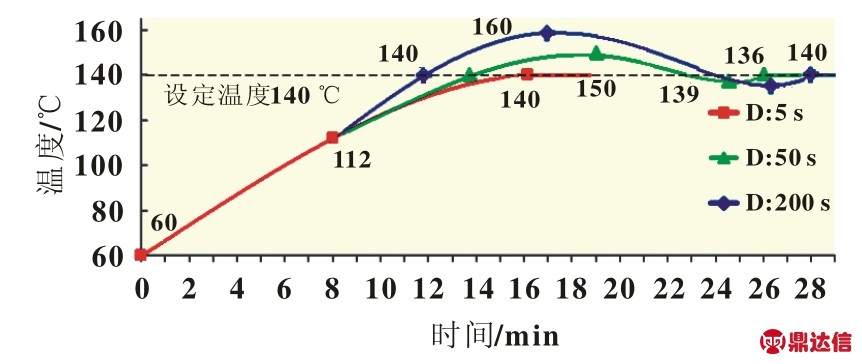
图7 不同Derivative tim e参数的温度曲线图
说明加热过程是具有滞后的特性,因此加入微分后可提前预测变化趋势。参数从0逐渐增加,升温调节速度会加快,节省时间。但是随着数值增加,温度调节失控,严重超温。调节方法参数由小至大调整,直至系统稳定快速即可,不可过大。
3.5 综合整定PID参数
通过以上实验分析。设定温度为140℃,此温度相对是偏低的加热温度,因此Zone为35%;只先调节Gain至45%时,温度稍有过冲,此时加入Integration time参数;Integration time为4 000 s时,温度非常平稳,没有过冲现象,但是升温时间变长,此时加入Derivative time参数;Derivative time为5 s时,调节时间缩短,并且也保证温度没有过冲,十分稳定。最终再根据经验规律,各参数确定为Gain:40%,Integration time:4 300 s,Derivative time:5 s,Zone:35%,温度曲线图如图8,与图2相比。加热效果满足温度准确达到设定值,消除温度过冲,升温调节时间缩短了14m in,提高效率。
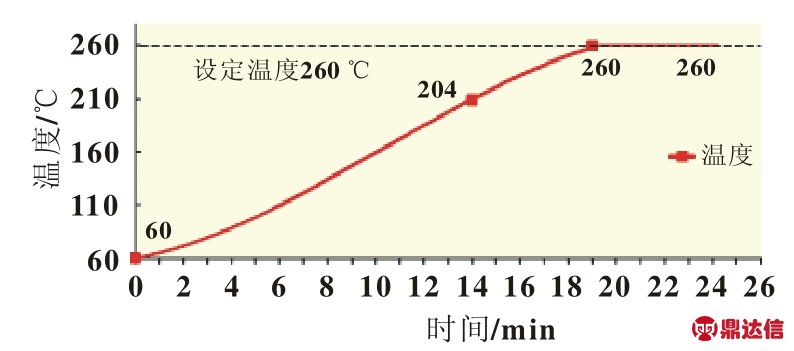
图8 140℃温度曲线图
3.6 不同温度的PID参数调节
以上调试都是设定温度为140℃,如果温度改变,则参数也要相应的改变,再以较高些的260℃为例。按照同样的方法,经过多次试验调节,确定参数为Zone:60%,Gain:20%,ntegration time:2 000 s,Derivative time:10 s,如图9所示。说明不同的温度,对应的温度控制参数也不相同,需要适当的修正。
4 结论
通过以上方法,实现了真空镀膜机PID温度控制,满足工艺需要的各种加热温度。摸索出各个参数的调节方法及顺序:Zone根据设定温度的大小成比例调节,不宜满负荷运行;Gain由小至大调节,升温加快,出现稍微过冲震荡即可;Integration time由大至小调节,系统稳定无误差,尽量缩短调节时间即可;Derivative time由小至大调节,系统快速稳定即可,不宜过大。最终再整体优化PID各参数,实现温度平稳升至设定温度,消除温度过冲,缩短升温调节时间,达到完美的升温加热状态。
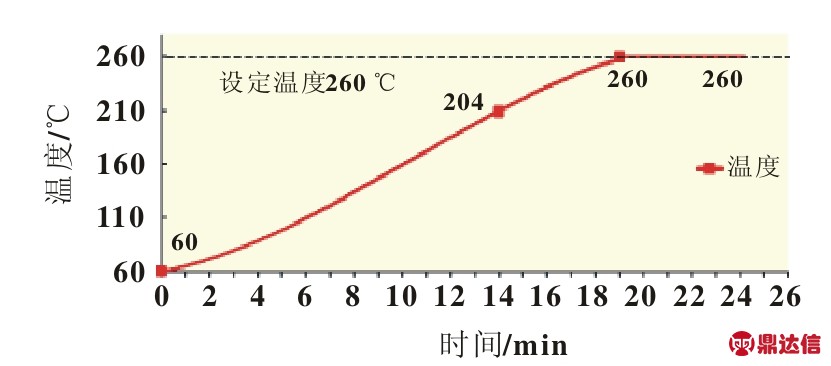
图9 260℃温度曲线图


