
摘 要:基于模块化技术设计了可用于PET离型膜贴片缺陷检测和产品分拣的自动检测分拣系统。系统由产品图片获取、信息识别、产品分拣三个子系统组成。使用Linea系列数字线阵相机获取产品图像,通过专门的程序对图像特征识别,然后根据识别结果驱动真空吸盘机械臂对检测产品进行分拣。利用STM32控制器实现对PET离型膜贴片尺寸、偏移、脏污、毛边等缺陷的自动化检测和产品分拣,统一质检标准,提高生产效率。
关键词:PET离型膜 自动检测 分拣 线阵
一、引言
随着科技的不断发展,人们对手机的使用频率越来越广泛。而用于手机半导体及环氧覆铜板表面的PET(聚对苯二甲酸乙二醇酯)离型膜贴片[1](如图1所示)的需求也越来越大。由于生产工艺的局限,对其缺陷的检测大多是人工通过显微镜检测,效率极低,而且由于质检员的个人因素以及个体之间的差异,不能保证质检标准的一致性,造成一定的不合格率,严重影响产品的质量,阻碍行业的发展。采用自动检测分拣系统代替手工操作来检测分拣贴片,既能剔除人为因素的影响,统一质检标准,保证合格率,又能实现自动化生产分拣,提高工作效率,减少人工成本。对于自动化技术的发展以及PET离型膜贴片的发展有着巨大的推动作用,因此设计一款运用于PET离型膜贴片的自动检测分拣系统具有十分重要的意义。
图1 PET离型膜贴片
文章设计的自动检测分拣系统利用滚轴式输送带与产品生产线相连接,产品在离开生产线后直接进入检测环节,节约大量时间。输送带的运行速度可以达到3m/min 。大大提高检测的速度。采用2000万像素的数字线阵摄像机获取产品图像,同时利用专业的图像识别技术进行识别,保证统一的标准,剔除众多不确定因素,确保质检结果。随后的真空吸盘机械臂可直接对产品进行分拣,大大节约时间,提高效率。
该装置的特点如下:①与生产线直接连接,输送带输送,避免中间环节的影响;②利用专门的图像识别技术对缺陷进行识别,避免外界因素的影响,统一质检标准;③添加真空吸盘机械臂对产品进行分拣,更好地进行分类,便于后期的处理;④利用STM32单片机对系统进行控制,实现自动化处理,提高精准度。⑤输送带与相机相结合保证扫描稳定性和快速性问题。
二、总体方案设计
现在模块化设计方法已经广泛运用与制造产业中,包括汽车、航天航空、机械电子以及程序代码编写中[2]。基于模块化设计的思想,文章设计的PET离型膜贴片自动检测分拣系统的总体方案如图2所示。总体分为三部分:产品图片获取模块、信息识别模块以及产品分拣模块。各模块相互独立有密切联系。密切联系是指模块之间需要组合起来才能搭建一个完整的系统[3]。
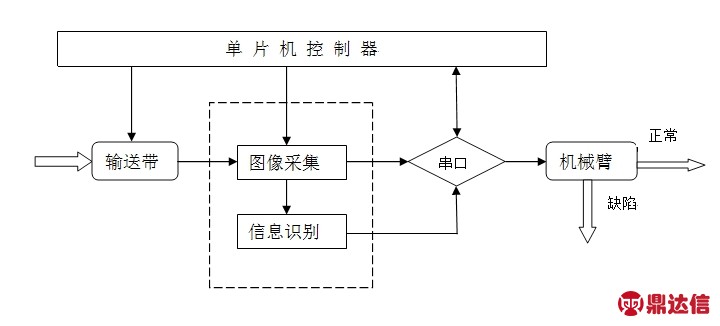
图2 系统框图
(一)产品图片获取模块
该模块的作用是获取PET离型膜的图片信息,为产品缺陷的自动化识别做准备。由滚轴式输送带和线性相机组成。
文章设计的滚轴式输送带贯穿装置全程,保证贴片的正常输送。滚轴的直径为12mm ,两滚轴之间的距离为36mm ,保证长条贴片在前进的过程中不发生变形而影响图片的采集。输送带使用HST2802M 42步进电机驱动。该电机的优点是与驱动器连为一体,结构轻盈,安装方便;速度可调节范围较大。可以很好地调节输送速度来保证图片的清晰度。
图片的获取采用Linea系列数字线阵摄像机,型号是LA-GM-02K08A-00-R。镜头使用索尼镜头,光源使用同轴光。拥有较完善的平场校正功能;利用颜色插值算法将Linea彩色线阵相机在RGB全彩模式下达到比Spyder3彩色线阵相机高50%的速度;扫描频率在500线每秒到2000线每秒之间,可调节范围较大。可达到2000万的像素,高速高灵敏地捕获输送带上前行贴片的图像。
(二)信息识别模块
利用程序编写上位机对获取的图像信息进行识别。接收产品图片获取模块的信息,根据特定算法对图片信息进行识别判断,与标准图片进行对比分析得到匹配分值与阈值进行比较从而确定是否有缺陷的存在。
(三)产品分拣模块
作用是将检测的产品进行分类——将有缺陷的和完好的分开,以便后期的处理。主要部分为两轴机械臂和真空吸盘。两轴机械臂实现X-Z两个方向的移动,如图3所示。X轴利用皮带模组进行传动,Z轴传动装置为滚珠丝杠。两轴的移动带动移动杆的运动使真空吸盘进行工作,将输送带上的PET离型膜贴片按照规划路线分为两部分从而达到分拣的效果。
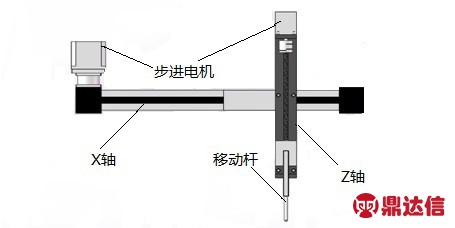
图3 两轴机械臂示意图
STM32芯片单片机贯穿整套系统,在产品图片获取模块中控制输送带的运行速度以及相机工作的时间;在信息识别模块中接收识别软件的信号;在产品分拣模块中控制机械臂的运动以及真空吸盘的工作完成对贴片进行分拣。实现产品检测分拣的自动化。
三、运动与控制方案
(一)机械驱动控制
设计的检测分拣系统有两处为机械驱动,分别是滚轴输送带机械驱动和两轴机械臂机械驱动。全部使用HST2802M 42步进电机驱动,该电机与配套驱动器无缝接合。驱动器电压为3.3V-5V,12V-24V两者可选,使用十分方便。同时配有信号接收端口,可以实现自动化控制。
1.滚轴输送带驱动
滚轴输送带是由滚轴、链条及框架构成,一系列的滚轴通过链条连接从而达到同步传动的效果。步进电机的转动带动链条的运动,链条的运动使所有滚轴同时运转,输送带工作。本次设计选择的滚轴外径为12mm 。输送带传送速度公式为:
其中:n 为驱动电机转速;d 为滚轴外径。
在保证贴片采集图片清晰度的前提下确定的电机转速为1.3r/ s ,滚轴输送带的速度为3m/min 。
2.两轴机械臂运动控制
两轴机械臂是丝杠模组传动以及皮带输送带传动,两者的工作过程不同,但原理相同,都是通过电机的转动,带动丝杠或者皮带进行传动,来实现某个方向的运动。
皮带传动的运动原理与滚轴输送带的工作原理一致,滚轴转动的线速度即为皮带运动的速度。驱动电机的转速为:
其中:n 为驱动电机转速;d 为驱动轴外径,本系统的数值为mm 。
设计要求皮带的速度达到20cm/ s,即12m/min 。则n为192 r/min 。
丝杠模组是利用丝杠的转动进行传动,本次设计选用单头的滚珠丝杠,具有良好的自锁功能,并且传动平稳。丝杠模组由步进电机驱动,为保证丝杠模组呢能够恰好地匹配系统的运动需要对其速度进行设定。根据设计要求丝杠模组的滑块的前进速度要达到0.02m/ s.根据系统设计暂定导程S=5mm ,则丝杠平均转速
(二)信息采集与识别
图像处理就是对图像信息进行加工以满足人的视觉心理应用需要的行为[4] 。图像处理的手段有光学方法和数学方法[5]。本系统的设计使用数学方法。利用数字计算机或其他设备,对从图像信息转换而得的电信号进行某些数字运算,从而提高图像的实用性。
1.信息采集
图像采集使用Linea系列的线阵摄像机。在同轴光作为光源的条件下进行工作。采集流程如图4所示。相机与电脑之间使用网口连接,可以快速地对信息进行处理。
线阵摄像机使用CMOS传感器作为图像触感器,所获取的图案是一条一维的线,随着被测物的移动,传感器连续不断地进行扫描,这样数据就可以拼凑成完整的图像。对物体的尺寸和长度没有限制,可以很好地运用于工业生产。
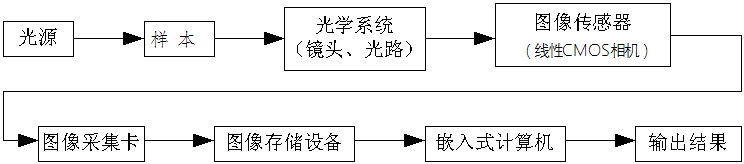
图4 图像采集过程
2.图像识别
图像识别的过程包含图像输入、图像预处理、图像特征提取和分类以及图像匹配四部分。图像识别是对获取的图像进行处理,判断是否存在尺寸、偏移、脏污、毛边等方面的缺陷。
(1)图像的输入
图像的输入即从存储设备里提取出所需要识别的信息,这是图像识别的首要步骤。
(2)图像的预处理
图像的预处理是为了去除图像信息中的噪声,保证信息的准确性,以便于正确提特征。
为了能够真实且直观地反应图像的特征,对获取的图像信息提取方向图,方法如下:
①将图像分割成足够小的方块。文章将图像分为16×l6的非重叠小块;
②对分割方块上的点利用Sobel 算法分别计算x-y两方向的梯度,具体公式如下:
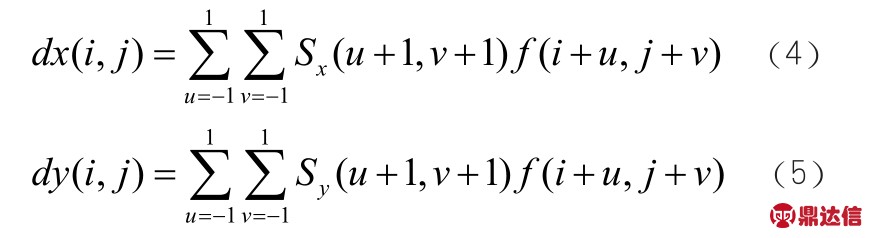
其中公式中的Sx ,Sy 表示Sobel ;f( i, j )表示各像素的灰度值。
③根据计算得到的梯度值,计算每一个分割块的方向:
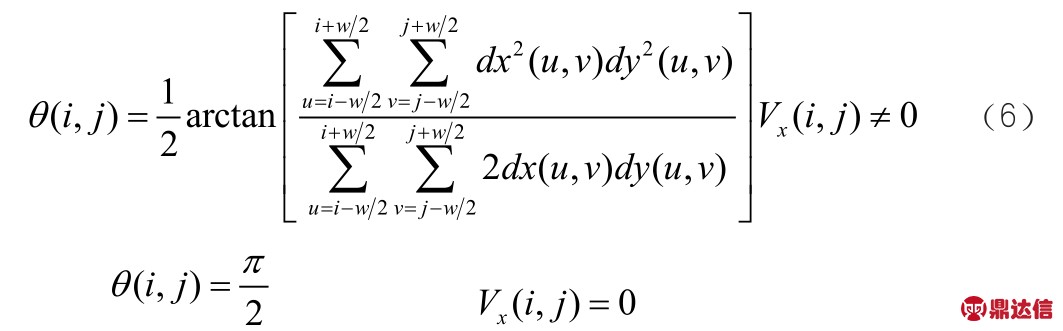
其中w 表示图像块的宽度,在文章中数值设定为为16,得到θ值后再量化为8个方向,就可得到图像的方向。
同时对于一些不能够明显显现的特征可以有选择的进行增强,文章选用Gabor 滤波方法进行实现。将函数的实部部分作为模板就可得到最接近真实的图像特征。具体公式如下:
(3)图像特征提取与分类
对图像的端点以及分歧点利用一个3×3的矩阵进行特征提取,如图5所示,N是待检测的点,顺时针排列的P1,P2,P3,···P8是它的8个邻域点,R(1),R(2),R(3)···R(8)分别是P2,P3,···P8,P1的灰度值。
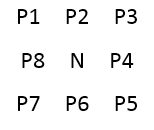
图5 特征提取矩阵
如果N是端点,则它的邻域点满足公式:
如果N为分支点,则它的邻域点满足公式:
通过分析数据特征,就可以找到相应的特征点,同时记录特征点的类型和位置。
(4)图像匹配
自动检测分拣系统使用的图像匹配方法是细节匹配。细节点模式中细节点特征向量集合P包括M个细节点,表示为![]() 输入细节点模式中细节点特征向量集合Q包括N个细节点,表示为:
输入细节点模式中细节点特征向量集合Q包括N个细节点,表示为:![]()
在特征集合表示方法的基础上,匹配问题表述为:搜索集合P和Q中点的最佳对应关系,根据对应关系下相应细节点的数目得到匹配分值MS,并与相应的阈值T比较,如果MS≥T ,则两个细节点模式匹配,反之则不匹配。
通过线阵摄像机获取的产品图像与标准产品图像特征的对比就可以判断检测产品是否存在缺陷,从而达到检测的目的。
(三)电气控制
运动控制采用的是ST公司的STM32F411RET6 MCU,为LQFP64封装,拥有100MHz的频率。工作电压是1.7V~3.6V。具有低功耗、低价格、高性能的特点。文章主要用到模块包括UART、PWM、TIM、A/D以及GPIO等。在保证PWM占空比固定的基础上改变PWM脉冲周期即可进行调速。配置对应的IO口工作方式使能SPI模块即可。以STM32为核心,将控制模块所用到的引脚引出,即可设计出控制模块的核心部分。
四、实验验证
实验验证分为两个模块,一是调节输送带的输送速度来获取清晰的图像从而进行判断,二是设置合理的两轴模组运动速度对样品进行分拣。
(一)图像获取及处理
由于CMOS传感器的特殊性,需要保证样品以特定的速度从相机下通过才能准确扫描。在可适应范围内,给定30组不同的输送带驱动电机的转动速度获取图像。实验测试结果为:在步进电机的转速为1r/s~1.5r/s的范围内可以获取可被信号处理软件识别的图像,获取图像如图6所示。

图6 相机获取贴片图像
线阵摄像机获取的图像通过网线传送给图像识别软件进行处理识别,经过预处理以及特征提取之后通过匹配无缺陷贴片的信息判定该样品的缺陷为偏移。
(二)分拣处理
分拣模块设定完成后,接收控制器的命令进行工作,通过观察分拣的时间以及分拣效果即可证明其实用性和稳定性。模块是由两轴机械和真空吸盘臂实现的,真空吸盘工作的关键点在于工作时间点以及吸盘给力的大小。两轴机械臂工作关键在于两周的运动速度配合。给定15组两轴的步进电机的转速,驱动皮带以及丝杠的运动,观察样品分拣的效果。实验结果为:X轴的皮带模组步进电动机的转动速度在185r/min ~201r/min 之间,Z轴丝杠的步进电动机的转动速度在296r/min~303r/min 之间能够准确的进行分拣操作。
综上所述,通过实验证明设计的系统能够实现PET离型膜贴片的自动检测分拣要求。
五、结论
文章所述PET离型膜贴片自动检测分拣系统以STM32单片机控制器为核心,通过模块化设计方法,综合机械机构、图像信息处理以及产品分拣技术,实现了对PET离型膜贴片的自动化检测与分拣。系统可与生产线无缝衔接,检测分拣过程全部由计算机控制,实现真正意义上的自动化,极大地提高生产效率以及产品的合格率。通过反复的试验以及技术改进,证明文章设计研制的检测分拣系统能够实现对PET离型膜贴片的自动化检测与分拣,稳定性良好。


