
摘 要:文章针对地球静止轨道遥感器设计需求,运用光机热集成设计的方法对相机进行了一体化设计。通过复合支撑方法实现了大口径SiC主镜的高稳定性支撑,保证了反射镜面形的稳定性;相机主体结构在兼顾双通道集成支撑与装调基础上,通过优化设计,保证了相机结构的高刚度、高稳定性;相机的隔振系统针对卫星基频进行了解耦设计,保证相机镜头的安全性;相机遮光罩通过结构及热控一体化设计,有效降低了热控功耗;相机整机力学试验及真空热试验的 MTF测试结果表明,相机主体具有较高的稳定性。
关键词:地球静止轨道 一体化设计 遥感相机 红外 “高分四号”卫星
0 引言
对地观测遥感器有很多种,包括从低分辨率多色图像的地球资源卫星,到导弹预警遥感监测的红外遥感器,再到高分辨率可见光遥感器。大多数对地观测详查卫星均工作于太阳同步轨道,此轨道距地大约 500km,可提供恒定的太阳高度角,同时可在较小大气阻力环境下得到高精度观测能力[1]。然而,低轨遥感卫星重访周期相对较长,如WorldView-1,GeoEye-1等,至少需要2~3天。对于遥感连续监视、快速响应的需求,低轨遥感卫星已不能满足。而地球静止轨道(GEO)对地观测卫星具备极高的时间分辨率和中等的空间分辨率,以及多光谱成像能力,能够满足减灾、林业、气象等用户广泛需求,同时可满足军事监视需求,具有极高的社会和经济效益[2]。美国从1970年即开展了地球静止轨道遥感系统研制(GOES)[3];其他国家也在同步开展地球静止轨道遥感卫星的研制,如欧洲的Meteosat、日本的JAMI、俄罗斯的GOMS、印度的INSAT、韩国的COMS,以及我国的风云气象卫星[4-5]。
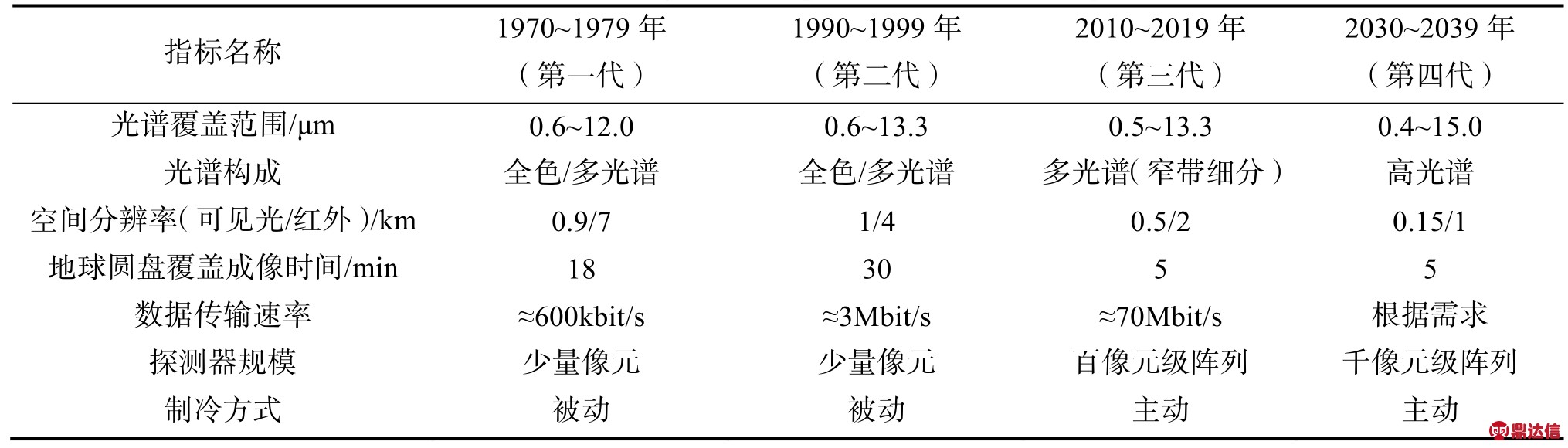
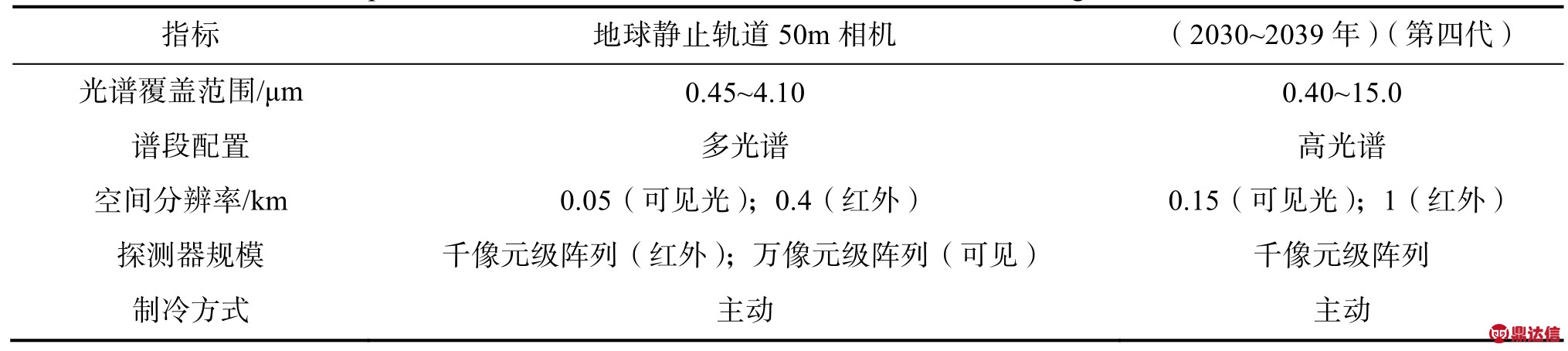
随着技术的发展,以及人类对减灾、气象等迫切需求,地球静止轨道遥感卫星在光谱覆盖范围、地面分辨率等关键指标上也在不断进步。Puschell等人[6]曾针对高轨遥感器技术发展趋势进行长期调研,如表1所示。
表1 地球静止轨道遥感卫星性能及发展趋势
Tab.1 GEO remote sensing satellites’ performance and development trends
本文所研究的“高分四号”卫星地球静止轨道遥感相机可实现星下点50m分辨率技术指标。经光机热一体化设计及与卫星一体化设计[7-10],相机集成了可见光近红外及中波红外通道,两通道均采用面阵探测器,通过管理控制系统实现两通道同时、同视场工作。另外,通过卫星姿态机动,可实现对地球圆盘区域内任意位置快速机动观测。该相机主体三维构型图如图1所示。
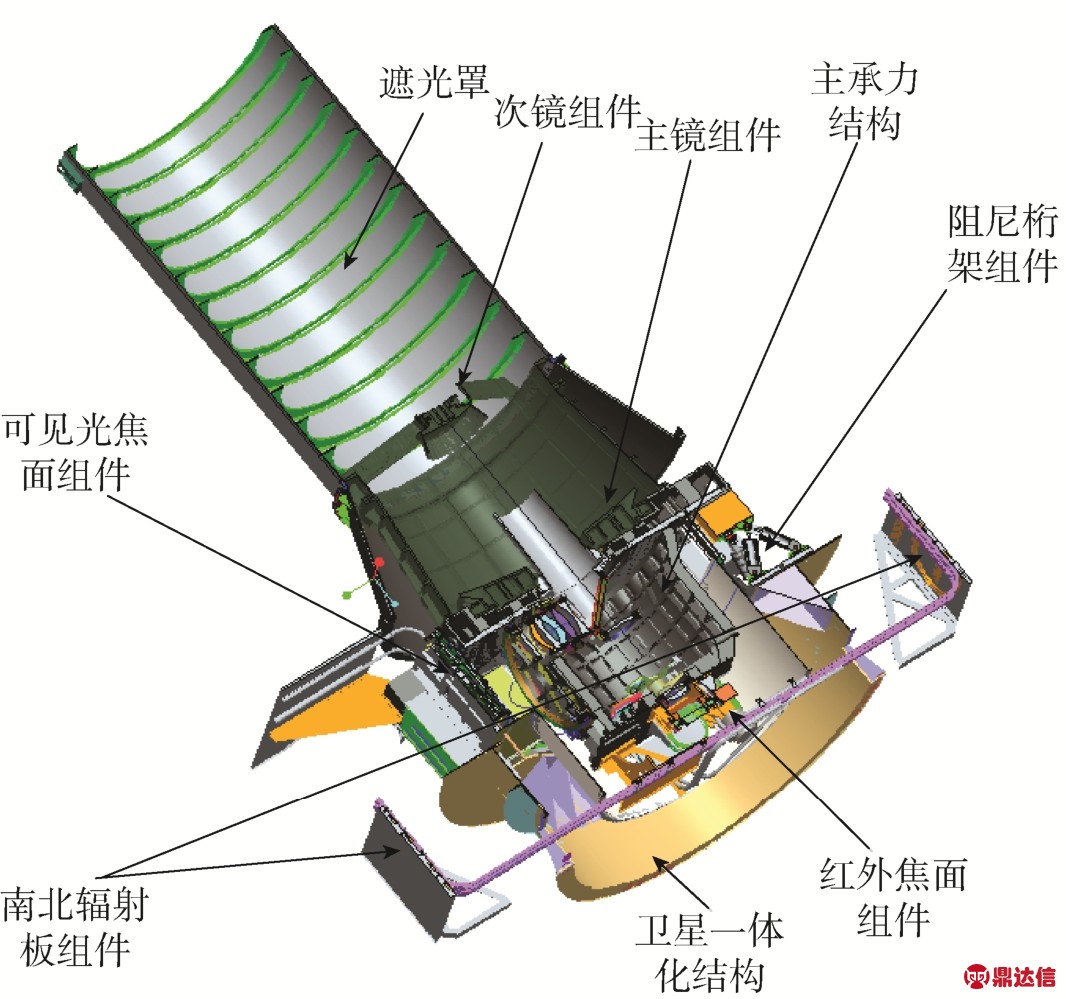
图1 相机主体三维构型
Fig.1 3D model of the camera
本文从相机在轨成像品质影响因素出发,采用多学科一体化设计方法,以系统总体最优化为目标,在大口径碳化硅主镜支撑技术、双通道集成的高稳定性主体结构设计技术、相机隔振系统设计技术、大型遮光罩结构热控一体化设计技术等方面,对“高分四号”卫星相机光机热集成设计技术进行介绍。
1 相机一体化设计及分析
1.1 反射镜组件的设计及分析
为实现对地物目标的高分辨率探测,地球静止轨道面阵遥感相机需要采用大口径长焦距主光学系统。主反射镜组件用于收集、反射地物目标的辐射能量,是相机光学系统关键组件之一。反射镜的支撑技术有装框式、多点支撑式等,多点支撑式又分为Bipod支撑式和多点球铰支撑式[11-12]。装框式是传统小口径反射镜多采用的一种支撑方式;Bipod式是为了适应大口径相机的发展逐步发展起来的一种支撑方式;多点球铰式是利用六点定位原理而设计的一种完全静定的支撑方式,适用于中小口径的反射镜支撑。上述支撑方式的特点如表2所示。
表2 空间遥感器反射镜支撑方式及其优缺点
Tab.2 Advantages and disadvantages of the reflective mirror supporting method for space remote sensor

本文研究的相机主镜,组件基频要求大于 120Hz,装调状态重力面形 RMS要求小于 0.003λ(波长λ=632.8nm),设计难度较大。由于反射镜背面和侧面空间尺寸的局限,无法采用多点支撑方式,因此选择装框式辅以限位块的复合式支撑技术,镜框与主承力结构间通过球头球窝垫片来释放装配应力,通过胶斑布局、胶斑面积和厚度的优化来实现主镜组件高刚度设计,以满足面形要求。主镜结构设计方案如图2所示。
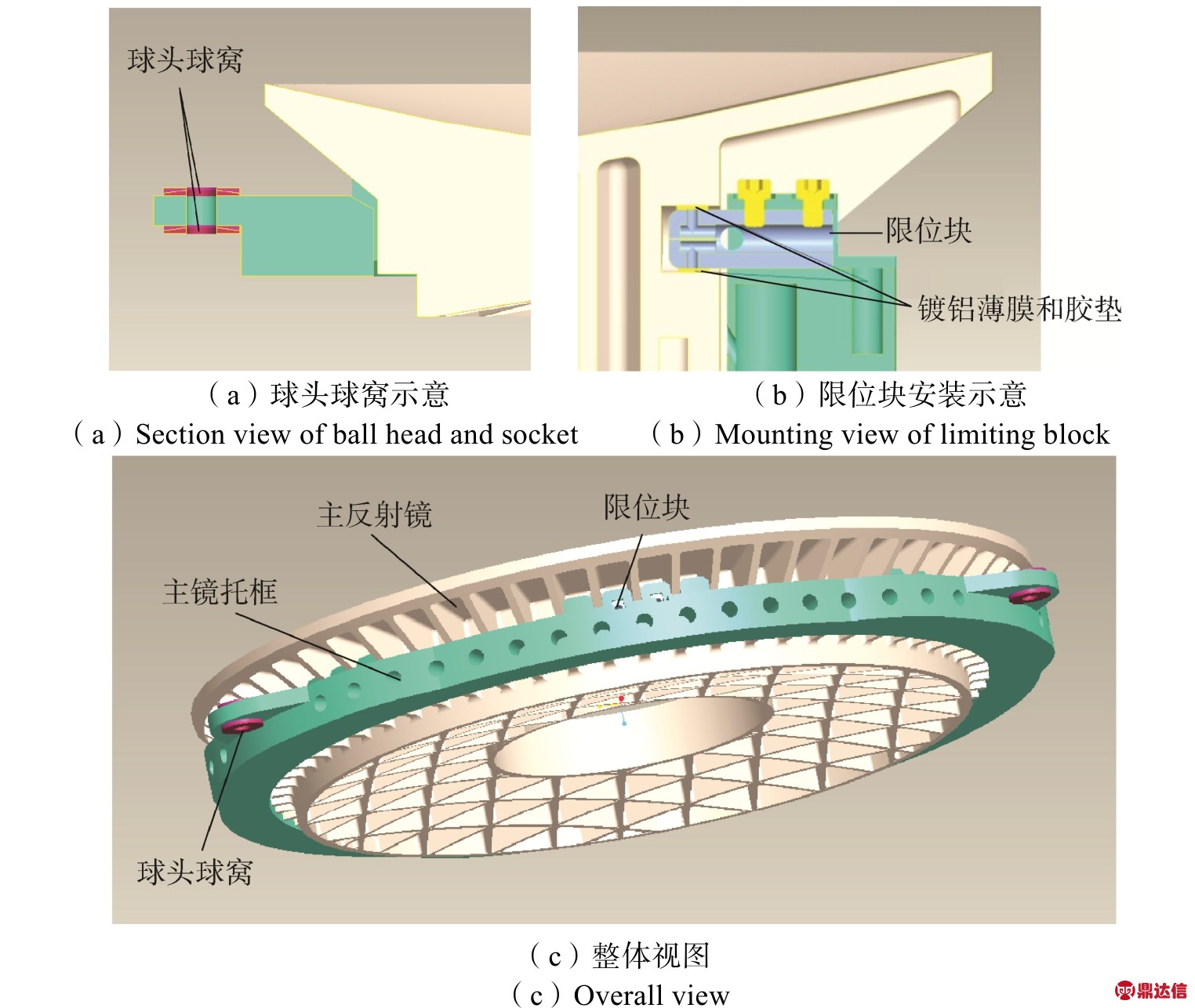
图2 主镜组件结构示意
Fig.2 The prime mirror structure
主镜采用背部开放三角形轻量化孔的形式,根据轻量化分析,最终确定的主镜轻量化结构参数如表3所示,主镜质量23.14kg,轻量化率76.6%。
表3 主镜轻量化结构参数
Tab.3 The lightweight structure parameter of the prime mirror

利用有限元技术对主镜组件的力学性能进行分析,装调状态下的重力面形RMS为0.001λ。变形云图及面形分析结果参见图3和图4。
图3 主镜组件光轴水平重力工况变形分析结果
Fig.3 1gndeformation cloud of the PM with the horizontal optical axis
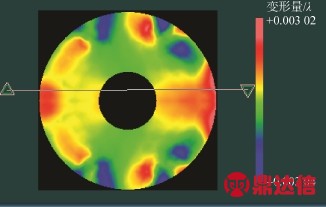
图4 主镜组件光轴水平重力工况面形分析结果
Fig.4 1gn deformation optical shape measurement result of the PM with the horizontal optical axis
4℃温度变化工况下,主镜面形为0.001λ,说明其热卸载能力满足要求。变形云图及面形分析结果参见图5和图6。
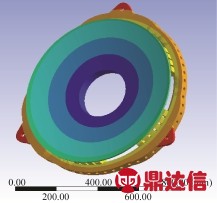
图5 4℃温升主镜组件热变形分析结果
Fig.5 4℃ thermal deformation cloud of the PM
图6 4℃变化主镜组件约束状态面形分析结果
Fig.6 4℃ thermal deformation optical shape measurement result of the PM
主镜组件安装点全约束情况下,对主镜组件施加10gn过载工况,经仿真计算,主胶斑最大径向应力为0.28MPa,轴向为0.15MPa,胶斑材料抗拉强度约为2MPa,因此该过载工况下,主镜组件胶斑在安全范围内。
根据图3~6中重力变形和温度变化变形分析结果可知,主镜组件装调状态重力面形和温度面形满足设计要求;后续须对相机进行整机 MTF力学试验测试,以验证该反射镜复合支撑技术是否能够实现严苛面形要求、高刚度要求、严酷力学环境要求的设计指标。
1.2 相机主体结构设计
空间遥感相机主承力结构的功能是为相机各光学、机构及电子学部件提供稳定支撑,保证各光学元件与像面之间光学系统所要求的准确位置关系[13-14];同时需能承受发射段恶劣的环境载荷,确保光学、电子学和机构部件不受损坏。因此,主承力结构设计的主要目标是在一定空间包络范围内、在有限总质量要求条件下,设计出满足高刚度、高稳定性支撑结构。
本文所设计的相机光学系统包括共用主光学系统的可见光及中波红外双通道[15],如图7所示。
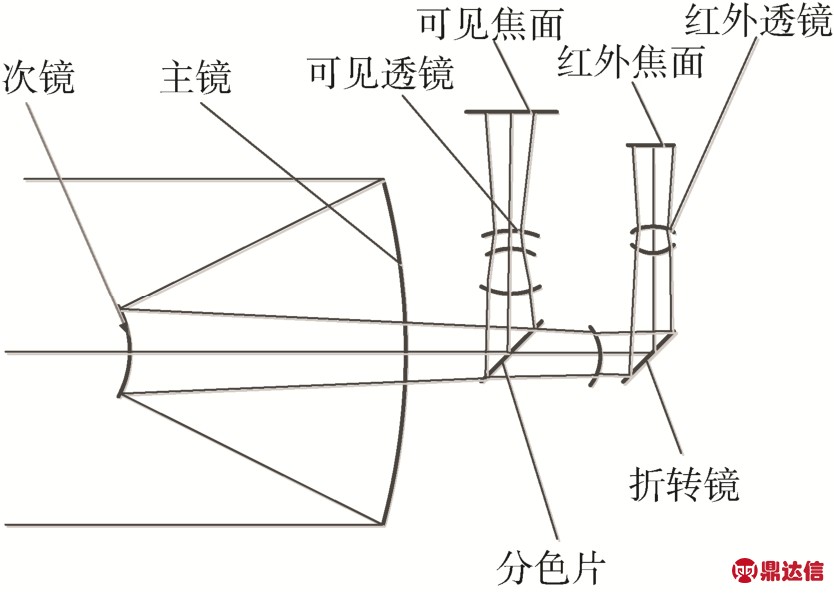
图7 相机光学系统
Fig.7 The optical system configuration of camera
根据光学系统构型以及装配装调过程要求,相机主承力结构采用分体构型。将主光学系统(主次镜系统)与可见光通道集成,采用拓扑优化技术,设计空心盒式铸造钛合金主承力结构——前承力框。在同等质量前提下,得到最优刚度结构构型;另外盒式结构便于设置安装结构,有效支持了相机光机热一体化构型设计。相机红外通道采用了焦面冷备份方案来提高系统可靠性,根据装调需求,将分色片后部所有红外镜头及焦面组件全部集成于一体,设计板框混合式铸造钛合金主承力结构——红外承力板。通过对筋板布局及筋板厚度的优化设计,不但使红外承力板有效利用了相机后部空间,还对红外通道部组件提供了有效的支撑,使红外通道装配装调与可见光通道完全解耦,大幅降低了总装难度,提高了相机研制效率。相机主光学系统与红外通道之间设计了筒式铸造钛合金承力构件——后承力筒。后承力筒结构在设计初期考虑了空间消杂光要求、相机后主体热控实施要求,以及主光学与红外通道系统集成等功能需求。后承力筒采用封闭筒壁式结构,结合经纬分布加强筋形式对筒壁进行加强,在有限总质量要求内,将相机两通道稳定连接到一起,同时为光学系统提供了封闭消杂光空间;也为相机热控实施、电缆部装提供了充裕安装界面。
对相机主体进行模态分析,其前两阶模态振型分别为沿X向平动以及沿Y向平动,模态频率分别为一阶模态40Hz,二阶模态40Hz,振型如图8所示。
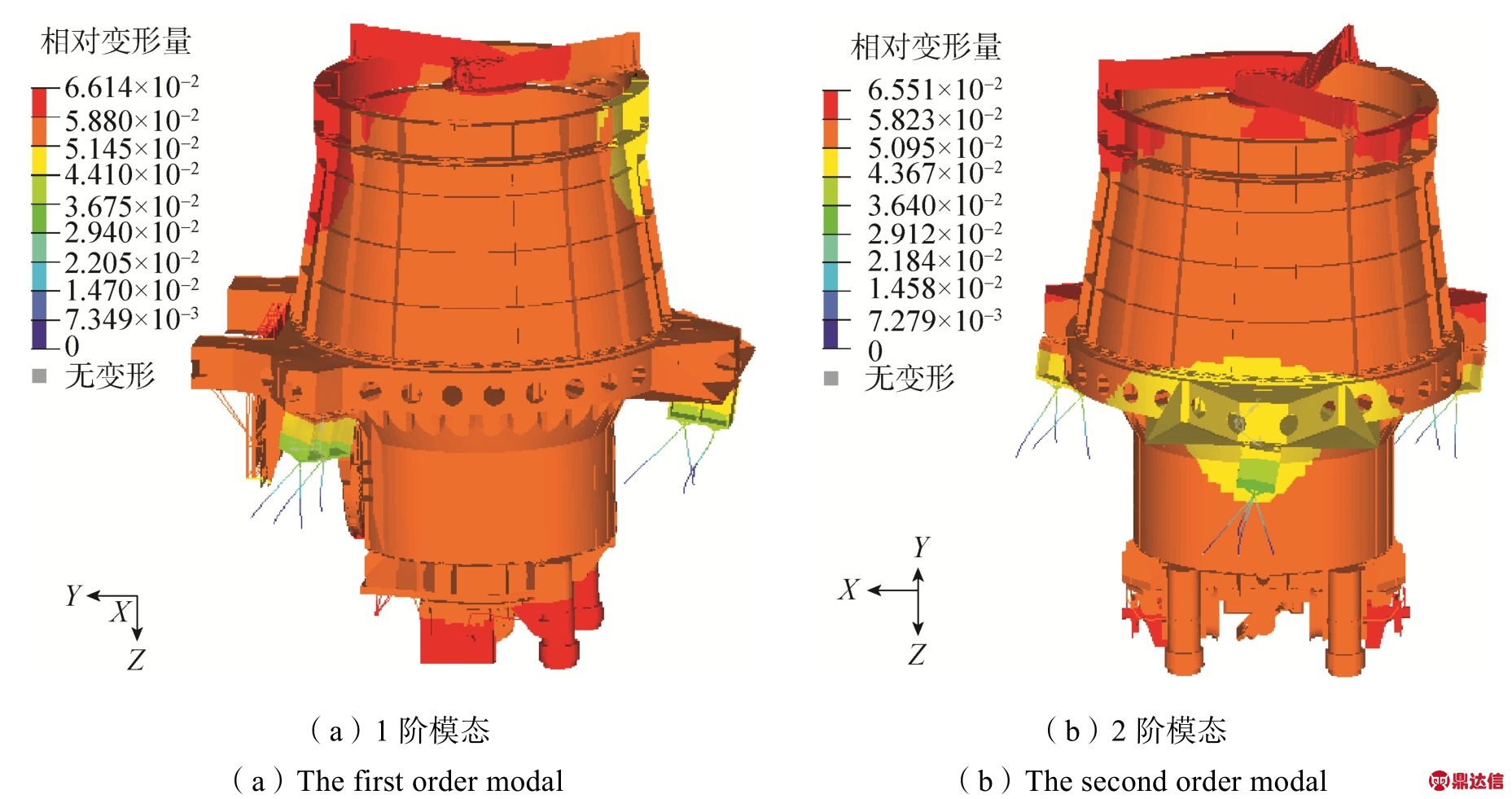
图8 相机主体前两阶模态
Fig.8 The first two order modals of camera
经过鉴定级力学试验测试,相机前两阶模态基频分别为X向41Hz,Y向41Hz,仿真计算结果与力学试验测得数据吻合较好,满足卫星总体要求。通过相机主体鉴定级正弦振动试验后的性能测试可知,相机主次镜、可见光焦面、红外焦面等关键测点响应均小于设计值,主体结构刚度及稳定性得到了进一步检验,能够确保相机经历发射段环境载荷后成像性能的稳定性,设计承载能力与力学测试结果对比见表4。
表4 相机关键部组件力学试验与设计承载对比分析
Tab.4 Comparison between designed bearing loads and test loads gn
1.3 相机隔振系统设计
由于“高分四号”卫星相机口径大,系统灵敏度高,为确保相机经历发射段载荷后光学系统依然保持最佳工作状态,需设计相机隔振系统,以减少卫星发射段传递给相机的振动载荷。根据卫星结构模态试验得知,整星X向、Y向前两阶模态频率约为21Hz和56Hz,Z向一阶模态频率约为 50Hz。根据隔振系统基本理论,相机一阶基频fc与卫星一阶基频fs必须满足![]() 时才有隔振效果[16],因此确定相机隔振系统设计目标fx、fy的设计空间为37~43Hz,fz设计空间为75~90Hz。
时才有隔振效果[16],因此确定相机隔振系统设计目标fx、fy的设计空间为37~43Hz,fz设计空间为75~90Hz。
综合相机连接系统结构尺寸设计空间与安装要求,设计了一种基于Bipod支撑方式改进的杆式阻尼隔振机构。阻尼杆组件三维图见图9,其利用内外筒壁填充阻尼材料,顶端设置支撑胶层提供刚度连接。通过三组共12根阻尼杆组成V型支座连接相机与卫星。通过对两杆之间夹角、支撑胶层数进行优化,得出满足基频设计要求的结果。
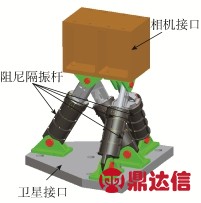
图9 杆式阻尼隔振机构组成三维模型
Fig.9 The 3D model of truss vibration isolation structure
经过仿真计算,阻尼桁架系统性能如表5所示。由表5数据可知,阻尼桁架系统基频特性实现了相机系统与卫星平台基频的解耦,有效减小了发射段卫星传递给相机的环境载荷。
表5 阻尼隔振机构设计验证结果
Tab.5 Test verification of truss the vibration isolation structure Hz

1.4 相机遮光罩设计
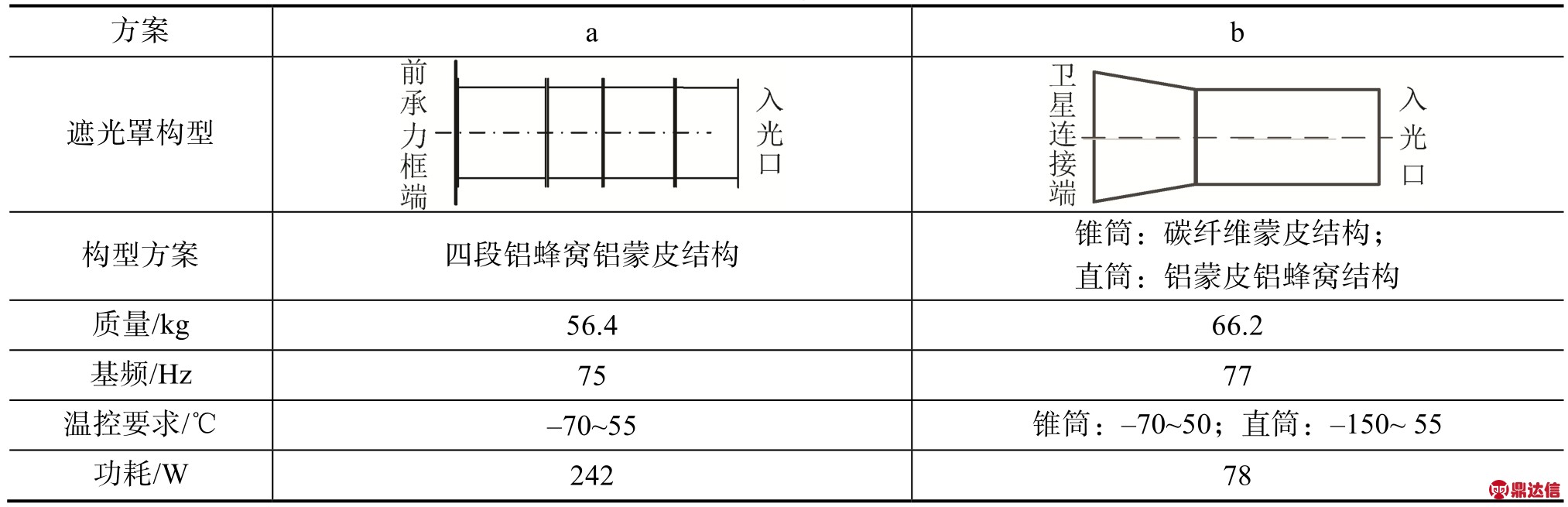
由于相机包括可见光谱段以及中波红外谱段,对可见杂散光以及红外杂散辐射都有较高要求,因此相机遮光罩内壁需设置光栏片配合表面喷消杂光黑漆的方式来削减可见杂散光,同时遮光罩需具有良好的导热性能,确保阳光照射到遮光罩后不会由于导热性差出现局部高温热斑,引起红外杂散辐射,影响相机红外成像性能。由于遮光罩具有独特的控温要求(高温要求低于55℃,低温根据连接位置热边界确定),其连接位置的温控要求直接决定了遮光罩构型方案以及热控功耗。
本文根据遮光罩功能要求,给出了遮光罩与相机主体直接连接(方案 a)和遮光罩与卫星承力结构连接(方案b)两种方案,其产品构型、质量及功耗如表6所示。
表6 遮光罩设计方案对照
Tab.6 The two design of the sun shade
综合两种方案,方案b质量略大,但其在功耗上具有较大优势,且遮光罩与相机绝热连接,大幅降低了相机热控设计难度,有效保证了相机在轨温度稳定性。因此确定方案b为最终方案。
2 整机设计结果及传函稳定性验证
经过系统设计及测试,地球静止轨道凝视相机各项性能指标均满足卫星总体的要求。与国内外其它地球静止轨道凝视型相机对比,地球静止轨道凝视相机在星下点分辨率、谱段配置、探测器规模等重要指标方面,均具有较大优势。与表1所示的地球静止轨道遥感器技术发展趋势对比,“高分四号”卫星相机的多数指标优于第四代地球静止轨道遥感卫星指标,部分指标值的对比如表7所示。
表7 “高分四号”卫星相机与国外第四代GEO相机指标对比
Tab.7 The performance contrast between GF-4 camera and the fourth generation GEO camera
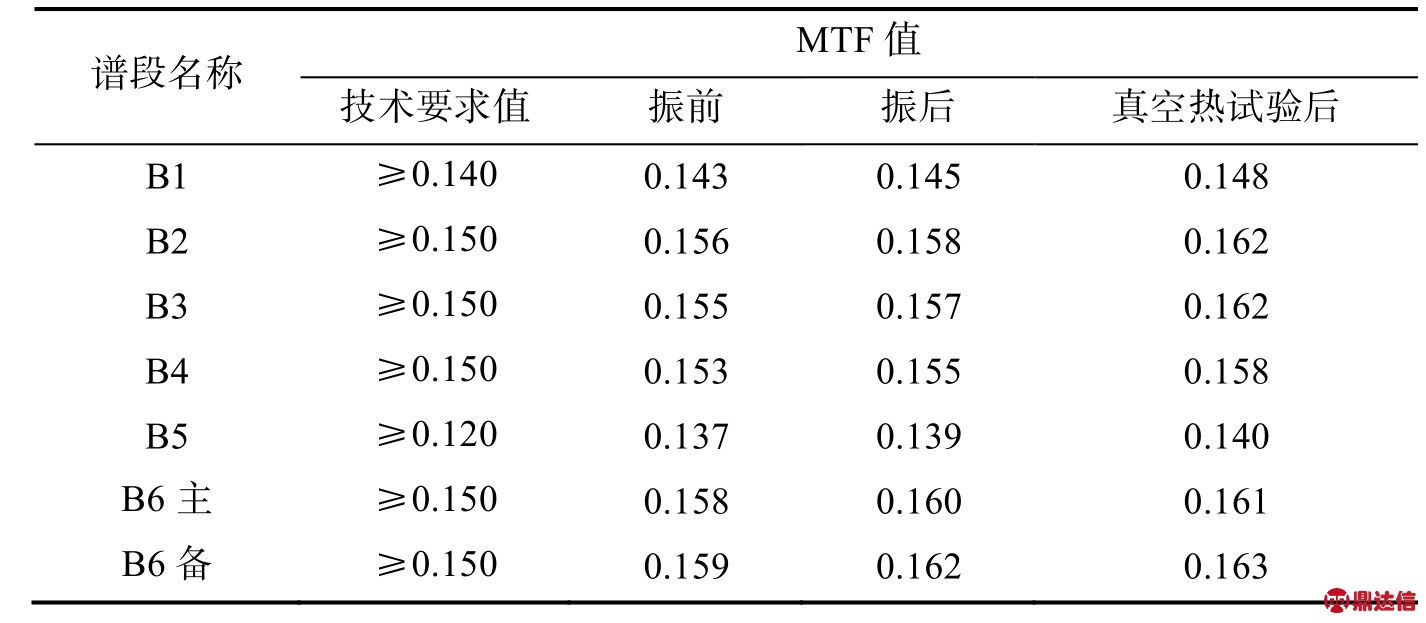
为验证相机采用的多种一体化设计手段是否确保相机具有足够的环境适应性,从相机的静态传函(MTF)角度进一步验证其光学性能稳定性。在相机研制过程中、整机振动试验前后、整机真空热试验后的各阶段均对相机各谱段传函进行了测试和对比,其结果如表8所示。
从表8中可以看出,相机各谱段全视场平均传函均满足指标要求,结合1.2节中相机主镜组件的力学性能分析发现,系统设计中所采取的多种一体化设计手段合理,有效保证了相机光机结构系统的稳定性,主体结构刚度能够满足发射段环境要求,进一步验证了相机一体化设计技术的先进性。
表8 环境试验前后MTF测试结果
Tab.8 The MTF test results before and after environment test
3 结束语
本文从光机热一体化集成设计角度出发,对影响相机光学稳定性、整机功耗、结构稳定性的几个关键部件的设计及优化进行了介绍,给出了整机的力学及真空热试验对系统传函影响程度的验证结果。试验结果表明,相机光机热一体化集成[17-18]设计方法的采用,保证了相机良好的结构及热稳定性,最终确保了相机在轨具备优异的成像品质以及适应复杂恶劣的高轨环境的能力[19]。


