
摘要 建立一台小容量电机外置式径向型超导飞轮储能系统样机,详细介绍样机结构及主要部件。采用灌封和粘接两种工艺,建立两套超导定子并对其进行悬浮测试。基于所建立的有限元数学模型研究样机超导轴承的磁场分布以及超导块材中的电流分布,得到其相应的变化规律。对安装了粘接超导定子的样机进行动态旋转实验,测量转子在不同稳态速度下的自由旋转和径向振动,分析其旋转特性,采用二范数研究转子径向振动幅值的变化规律。结果表明振动与旋转特性密切相关,低于共振点时转子振动随转速的上升而显著增加,进而导致转子转速不能持续上升。采用组合轴承系统限制转子振动幅度是提高系统转速和机械稳定性的有效方法。
关键词:高温超导 超导飞轮储能系统 有限元数学模型 电磁分布 旋转特性
0 引言
高温超导(以下简称超导)体具有很多优良特性,其中抗磁性和磁通钉扎特性可以实现无源自稳定悬浮[1],因而备受瞩目。目前超导体及相关技术越来越多地应用于工业领域中,而超导飞轮储能系统[2-5]和磁悬浮车(Maglev)[4,6]被认为是最具潜力的超导装备之一。超导飞轮储能系统(Supercon- ducting Flywheel Energy Storage System, SFESS)除了具有常规飞轮储能系统的高储能密度、高转换效率、大功率密度、长寿命、短时充电以及绿色环保等优点外,其超导磁悬浮所具有的无源自稳定性,使悬浮轴承完全省去了外部控制。超导飞轮储能系统能够应用到风力发电、太阳能发电以及电力系统 中[2,5,7],必将对未来的电网产生深远影响[8-14]。
在过去的二十年里,国内外已经成功地研制出多款超导飞轮储能系统样机。2007年,美国波音公司(Boeing)设计了1台5kW·h/100kW超导飞轮储能系统样机。在此基础上,2009年又研制出5kW·h/3kW超导飞轮储能系统[3]。波音的超导飞轮储能系统采用轴向型超导轴承,具有较小的损耗。德国ATZ公司在2007年制造了1台5kW·h/250kW的超导飞轮储能系统,采用径向型超导轴承,转子重450kg。2006年日本国际超导产业技术研究中心(ISTEC)研制了1台10kW·h/100kW超导飞轮储能系统[15],采用1个径向型超导轴承(外转子型)和2个有源轴承悬浮转子来抑制振动。ISTEC改进了冷却系统结构,采用中心轴冷却超导块材,并详细研究了系统的整体损耗。2012年韩国电力研究院(KEPRI)开发了1台35kW·h样机[16]。为了提高刚度,KEPRI设计并采用了两套混合轴承组件,每套包含1个径向型超导轴承和1个有源磁阻尼器。目前该样机已应用于地铁站电力系统的削峰平波。2016年,日本的古河电气公司(Furukawa Electric Corporation, FEC)研发了1台300kW的超导飞轮储能系统[5],其超导轴承的定转子均由超导材料制成,即定子采用REBa2Cu3Oy超导带绕制,转子由YBa2Cu3Oy制成盘状,其悬浮质量达到4t。到目前为止,该系统已应用于铁路电力网中。为了减少损耗,葡萄牙的里斯本大学(ULisboa)在零场冷条件下对径向型超导轴承进行了静态测试[17]。伊朗科技大学(IUST)采用盘形超导块材制造超导定子并优化了它的结构[18-19]。巴西里昂联邦大学(UFRJ)和土耳其盖布泽技术大学(GTU)也进行了相关研究[20-21]。
2001年,中科院电工所研制了1台混合型超导飞轮储能系统[22],包含1个轴向型超导轴承和2个有源轴承。课题组对径向型超导轴承和超导飞轮储能系统的结构进行了相关研究:研究永磁转子的磁场特性、优化轴承结构[23]、建立有限元数学模型分析悬浮特性[24]、利用3D测试平台测量轴承悬浮和径向刚度[25]以及设计与优化低温泵的轴承结构[26]等。为了验证径向型超导飞轮储能系统的基本原理,探索其运行的基本规律和特性。在前期工作的基础上[22-27],研制了1台小功率的超导飞轮储能系统样机,采用径向型超导轴承和外部电机驱动,转子完全由径向型超导轴承悬浮,省去了外部控制的有源轴承,整体设计难度和复杂度较大。本文将介绍样机的悬浮测试及旋转实验,并对其电磁特性和旋转特性进行讨论。
1 样机设计
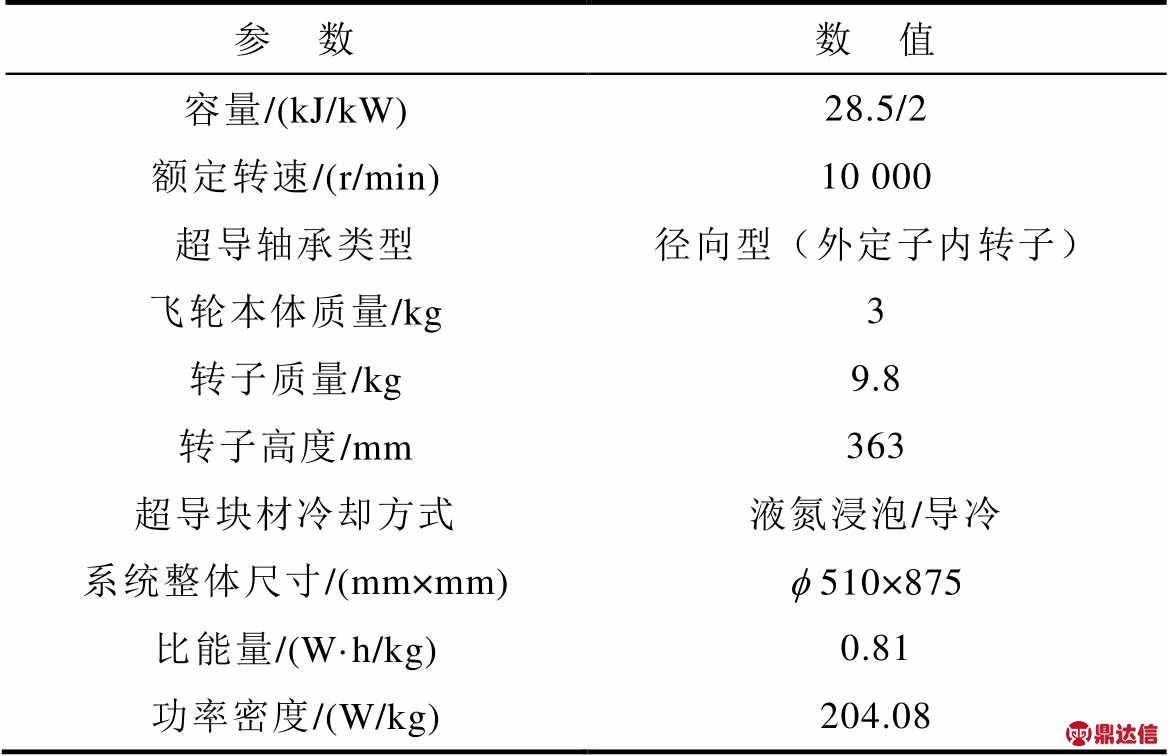
超导飞轮储能系统样机结构如图1所示,其主要部件包括增强型复合材料制成的质量为3kg的飞轮、2kW无刷永磁直流电机、径向型超导轴承、保护轴承以及提供真空环境的真空腔。样机设计参数见表1。整个系统固定在支撑台上,真空腔与台面之间用螺栓固定。飞轮本体和超导轴承永磁转子均套装在主轴上,转子的套装顺序应先进行主轴与飞轮的套装,其方法是利用主轴与飞轮的热膨胀系数不同,在高温条件下进行加热,将主轴穿过飞轮中间的铝合金轮毂,再进行降温。由于飞轮铝合金轮毂的收缩率大于无磁不锈钢主轴的收缩率,因此主轴与飞轮以压应力紧密结合在一起。在装配超导轴承的永磁转子时,由于永磁环的装配采用同极相对的方式,从而产生了较大的斥力,所以需用夹具夹紧,并用胶粘牢。装配完成后主轴端部的永磁环用轴套卡紧,防止在主轴高速旋转或大功率放电时松动弹出。电机由固定在飞轮运行腔体盖板上的支架支撑,并用螺栓固定。电机轴通过柔性联轴器与主轴连接,在确保同轴度的情况下通过联轴器驱动飞轮转子旋转。当系统停止工作时,转子由主轴底部的止推保护轴承支撑。下面分别介绍主要组成部件的结构和参数。
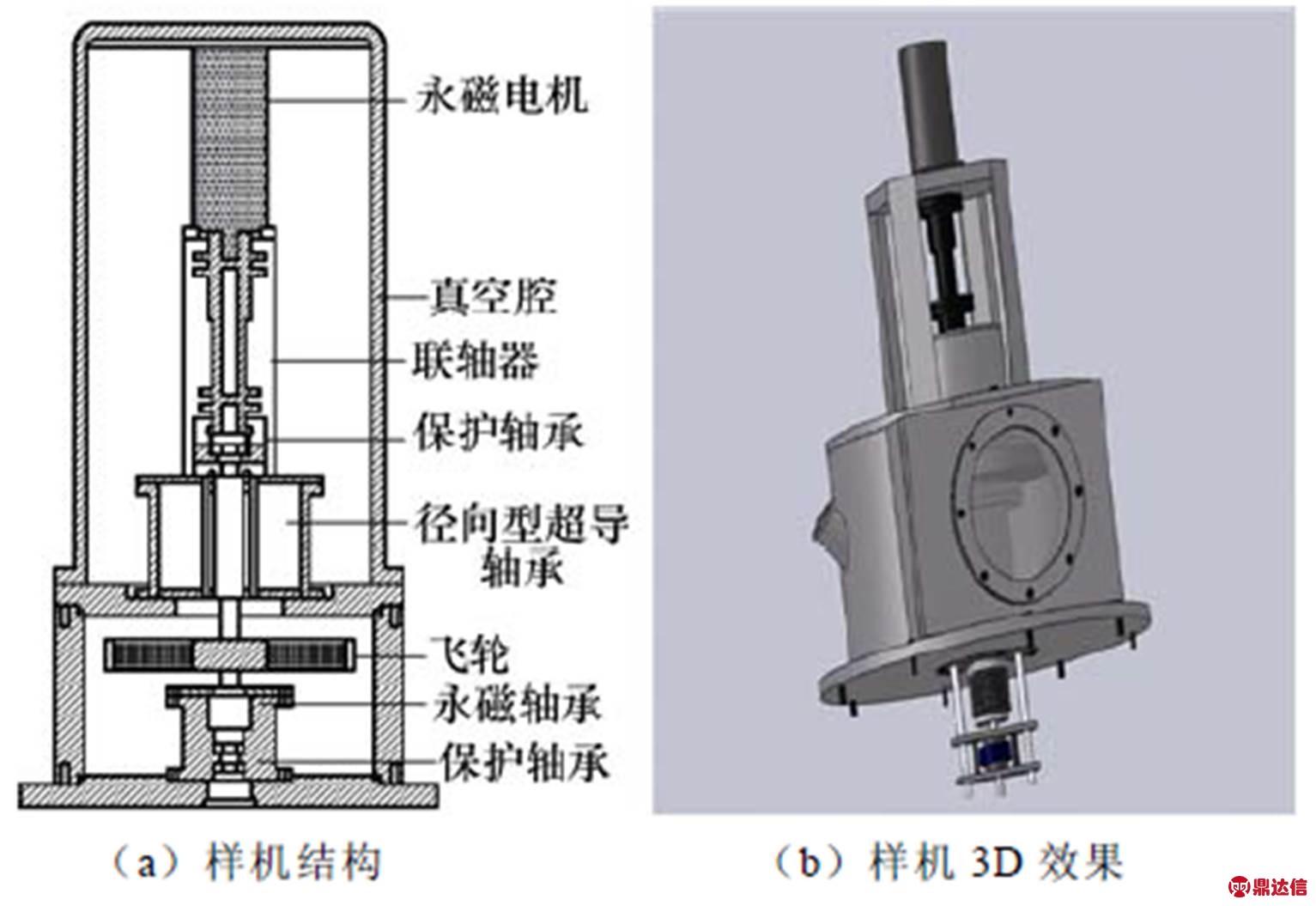
图1 超导飞轮储能系统样机结构
Fig.1 Structure of SFESS and its 3D model
表1 样机设计参数
Tab.1 Design parameters of SFESS
1.1 飞轮本体
飞轮是储能系统的核心部件之一,是承载能量的部件,这就要求其结构设计必须在有限的体积或质量下提高转动惯量和角速度,以获得高储能密度。目前,制作飞轮的材料一般为不锈钢、玻璃纤维或碳纤维复合材料。飞轮形状主要采用多层空心圆柱状和环状,此外还有纺锤状和伞状等。本样机的飞轮本体结构与转子3D图如图2所示。
飞轮本体主要由玻璃纤维、碳纤维增强复合材料和铝合金轮毂组成(见图2)。飞轮质量为3kg,其外径为160mm,内径为20mm,转动惯量(J)和设计转速分别为0.052kg·m2和20 000r/min。当转子转速为10 000r/min(即额定转速)时,根据公式a= dW /dt·r,飞轮最大角加速度为19.23rad/s2,飞轮边缘最大线加速度为3.07m/s2。
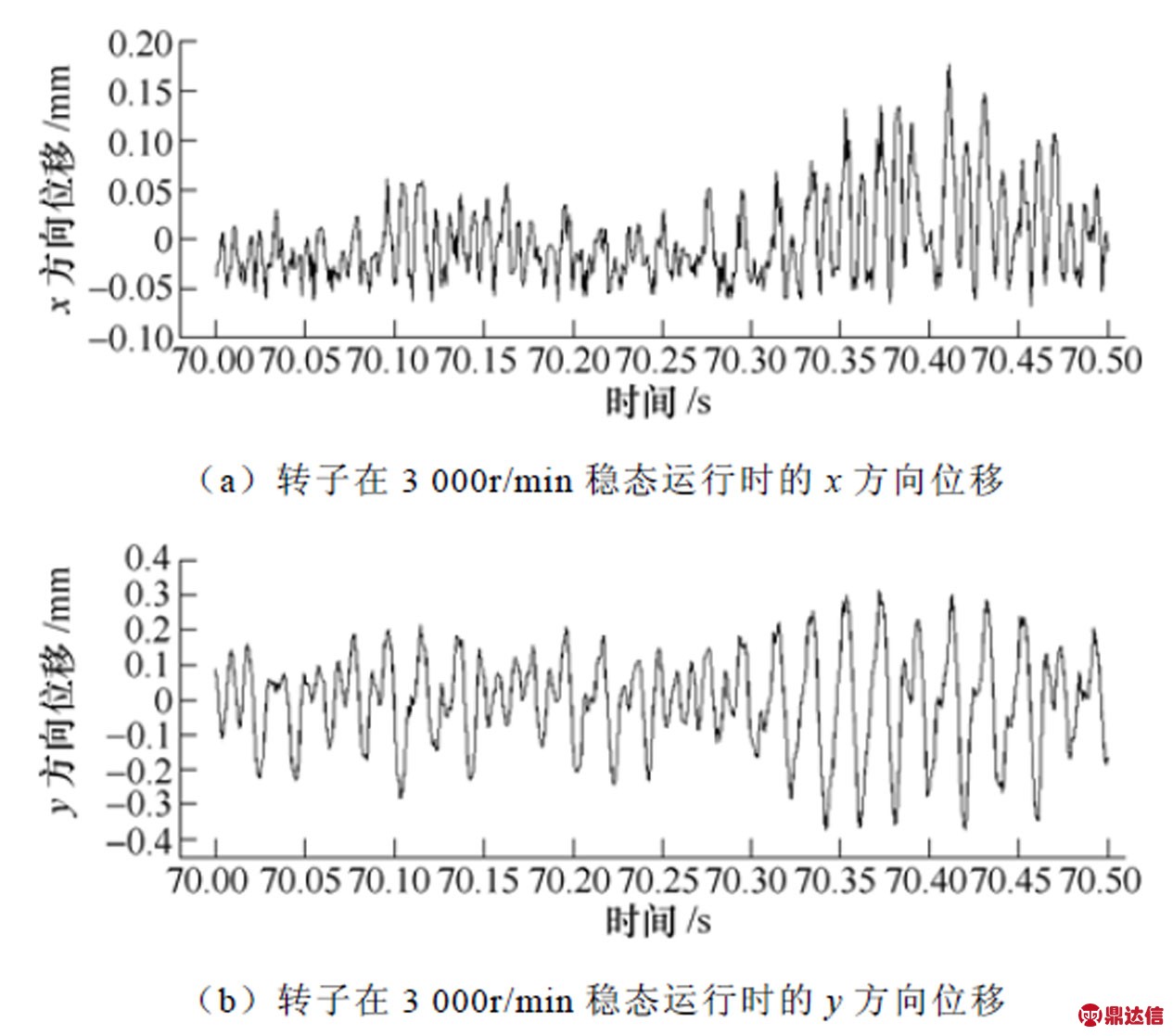
图2 飞轮本体结构和转子3D图
Fig.2 Structure of flywheel body and 3D drawing of rotor
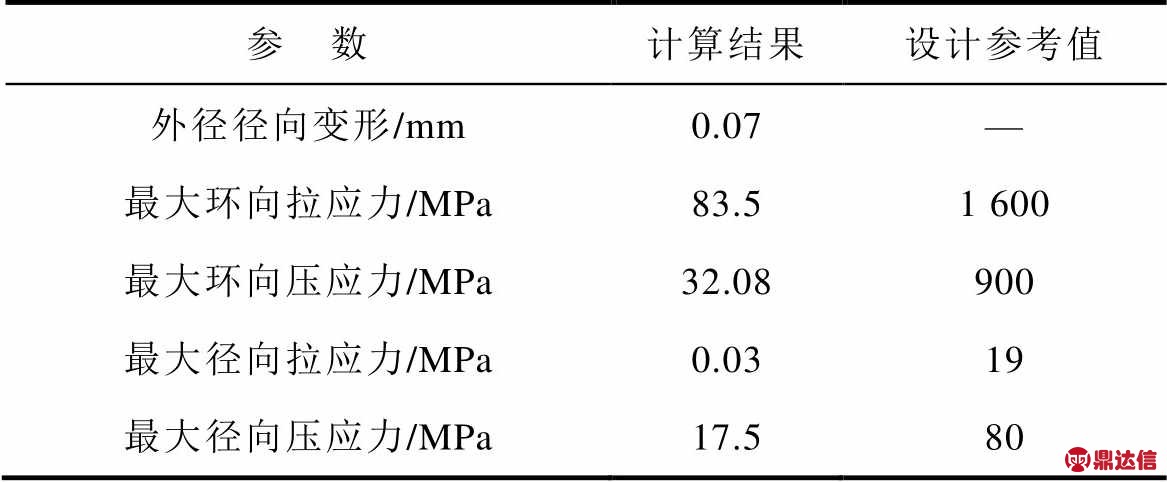
在设计转速20 000r/min下对飞轮在旋转载荷下的径向应力、径向位移以及环向应力进行仿真,计算结果见表2。结果表明飞轮外径径向变形、最大环向拉压应力以及最大径向拉压应力等参数完全满足设计要求。
表2 参数计算结果
Tab.2 Calculations results of parameters of flywheel
1.2 径向型超导轴承
本样机的轴承系统由1个径向型超导轴承和3个机械轴承组成,超导轴承的作用是悬浮转子并抑制其径向振动,保护轴承的作用是使转子不受径向和轴向损坏。径向型超导轴承结构如图3所示。
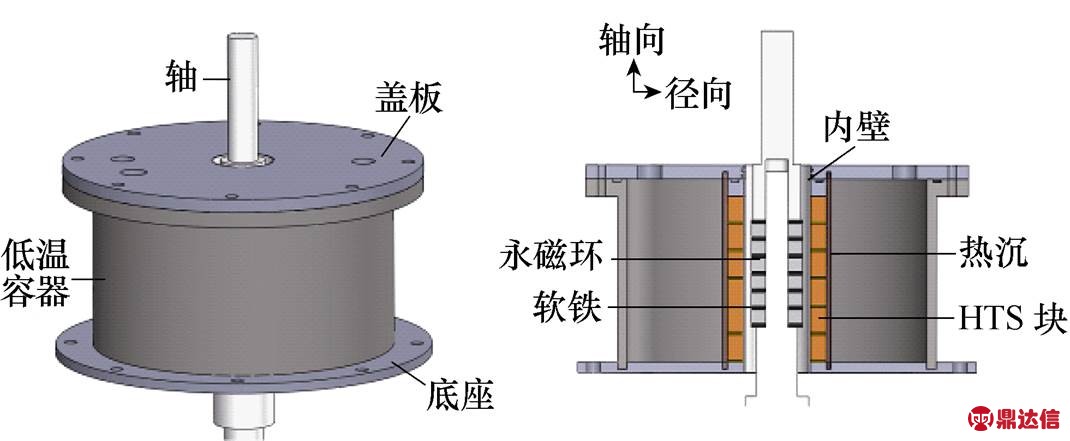
图3 径向型超导轴承结构:3D外形和2D截面
Fig.3 Structure of radial-type HTS bearing: its 3D profile and 2D cross section
永磁转子由6块NdFeB永磁环和7片1J22聚磁铁环组成。永磁环轴向磁化,同极性相对。永磁环和聚磁铁环均套装在无磁不锈钢主轴上,永磁环与聚磁铁环一一交叠排列放置,两端用螺母夹紧固定。永磁环尺寸为:外径37mm,内径20mm,高度8mm。聚磁铁环外径和内径均与永磁环相同,厚度为2mm。经测量,中部的聚磁铁环表面剩磁为0.85T,两端部的聚磁铁环表面剩磁是中部的一半为0.43T,磁场方向为径向。
为样机制作了两套超导定子,分别采用灌封和粘接的方法。采用灌封法制作的超导定子(简称为灌封超导定子,同理简称为粘接超导定子)主要由YBCO超导块材、316L不锈钢杜瓦、热沉以及内壁等器件组成。采用32块超导块材堆叠成4层超导环,在超导环之间垫有氮化铝片以增强导冷效果,热沉为紫铜制成。为加固超导定子的整体结构,采用灌封工艺封装。灌封超导定子如图4所示,整个定子尺寸为:f 200mm×f 40mm×160mm。
图4 灌封超导定子及其灌封过程
Fig.4 Superconductor magnet stator made by potting method and its potting process
粘接超导定子的内壁和底座的材质为无磁不锈钢材质。为了定位和疏导液氮,分别设计了底部托盘和中部托盘两种托盘。底部托盘的上端面和中部托盘的上下端面均设计有锯齿状的凹槽即导流槽,液氮可以从导流槽流到超导块材底部和顶部,增加了超导块材的冷却面积。底部托盘和中间托盘均用环氧树脂材料制成,底部托盘尺寸为f62mm×f42mm× 22mm,在其上端面沿圆周方向均匀开有12个槽,两槽中心线的夹角为30°,在外径上的槽口宽5mm,槽深1mm。中部托盘尺寸为f 62mm×f 42mm×2mm,沿圆周方向均匀地在其上下两个端面分别开12个槽,槽深1mm。总共粘接24块超导块材组成3层超导环,粘接超导定子如图5所示。

图5 超导块材粘接后的3D效果图及粘接超导定子
Fig.5 Bonding of HTS bulks and photograph of superconductor magnet stator made by bonding method
1.3 电机及测控系统
电机是能量转换的核心部件,飞轮储能系统要求电机在运行时既可作为电动机又可作为发电机。当系统储能时,电机作为电动机运行,带动飞轮加速旋转至额定转速,飞轮储存能量;当系统释能时,电机作为发电机运行,向外输出电能,此时飞轮转速不断下降。目前电机的选取多为两类:一类是交流励磁的变速恒频双馈电机;另一类采用结构简单的永磁电机。后者转子结构简单,机械强度高,可以达到很高的转速,并且在转子上几乎没有损耗,不发热。而这些特点非常适合超导飞轮储能系统结构和运行条件,所以永磁电机越来越多地被选为驱动飞轮主轴的动力机构。本样机选用北京和利时公司生产的92PMDC6-100100-H1-A改进型高速永磁无刷直流电机,其参数为:额定功率2kW,额定转速10 000r/min,额定转矩2N·m,极对数5。
基于样机自身结构和被测物理量的特点设计了相应的测控单元,在上位机进行汇总及综合监控,构成了整个测控系统。本测控系统实现了对样机主轴的径向位移、轴向位移、飞轮转速及运行状态、液氮液位、电机电枢电流、电枢线电压以及放电电压等物理量信息的实时监测。
2 样机悬浮测试及其电磁特性分析
2.1 悬浮力测试
为尽可能地减少散热,模拟真空中的热环境,灌封超导定子被放置在一个不锈钢低温容器中。实验中使用的永磁转子包含3个永磁环和4个聚磁铁环,其尺寸与样机永磁转子所使用的完全相同,中间聚磁铁环的表面磁场亦为0.85T。由于灌封超导定子中的超导块材被低温胶包围密封,热传导效率和真空度等因素的影响,其场冷时间较长。而粘接超导定子中的超导块材直接浸泡于液氮中,其场冷时间较短。实验时,灌封超导定子的场冷时间为1.25h,粘接超导定子的场冷时间为35min。永磁转子沿轴向运动,运动路径为0mm—10mm—0mm。测量过程及结果如图6所示。
从灌封超导定子悬浮力测量结果可以看出,其最大悬浮力为106.3N,大于样机飞轮转子总重量。在位移0~10mm对应的悬浮力上升部分,其线性上升段(对应位移为0~5mm)[20]的上升速率较平缓,而且其饱和段(对应位移为5~10mm)并不明显,没有出现达到最大值后略有下降的现象。考虑原因主要为以下两点:一方面,永磁转子为3层永磁环,总高度为32mm,而超导定子中超导环的层数为4层,氮化铝片层数为5层,总高度为74mm,远高于永磁转子的高度。所以超导块材中钉扎磁通的数量远未达到饱和,只能在场冷位置处的局部达到一定的数量,表现为悬浮力在上升初期的曲线较“陡”,随后变“缓”的现象。另一方面,由于超导定子的杜瓦由不锈钢制成,虽然放进低温容器中,但是在杜瓦的上沿附近区域仍与空气直接接触,杜瓦内的表层液氮与空气进行热交换以及灌封工艺等因素都直接影响超导块材的冷却效果,从而使永磁转子移动后期悬浮力上升缓慢。
图6 悬浮力的测量
Fig.6 Measurement of levitation force
从粘接超导定子悬浮力测量结果看,最大悬浮力为100N,效果非常理想。总之,灌封超导定子和粘接超导定子的最大悬浮力均大于转子重量,如果在样机的6层永磁转子下场冷,则最大悬浮力必然远大于此数值,所以在真空环境中两套超导定子均完全适用。在实际样机的运行中,粘接超导定子的悬浮刚度已达到53N/mm,因此,所设计的超导轴承完全能够悬浮样机转子。
2.2 径向型超导轴承电磁特性分析
在场冷情况下,悬浮力属于电磁力的一种,主要源于超导块材中的钉扎力,钉扎力密度的大小取决于钉扎中心的数量和元钉扎力。当超导材料和外场确定后,这两个因素均为常量。但对于超导轴承而言,永磁转子的移动或振动使外场不断发生变化,因此钉扎力密度是变量,即悬浮力也不断变化。从宏观角度来看,悬浮力是由于外部磁场中超导体感应电流引起的电磁力。目前,计算电磁力方法主要为有限元法[28-30]。与有限元的A-V法[28]和T-W 法[29]相比,H-法在计算复杂性和简化方程等方面具有一定的优势[30]。所以,本文采用H-法建立有限元数学模型来分析该样机超导轴承的电磁特性,模型建立的详细过程请见参考文献[24,27]。
基于粘接超导定子建立模型,其原理如图7a所示。通过本模型计算了上升段悬浮力(对应永磁转子的位移为0~10mm),并与实验测量结果进行了比较,计算参数见表3。图7b给出了样机实际永磁转子(包含6层永磁环)作用时所计算的悬浮力曲线,从图7b可以看出,计算曲线与实验曲线匹配度很好,在线性上升段相对最大偏差为9.4%,饱和段为2.4%。偏差产生的原因可归结为以下三点:①实验时,在场冷或永磁转子移动阶段,永磁转子的z轴没有与超导定子的z轴完全重合;②永磁转子的场冷位置没有完全对准超导定子的几何中心处;③对于数值计算而言,参数值的选择也会影响到悬浮力曲线的匹配度。
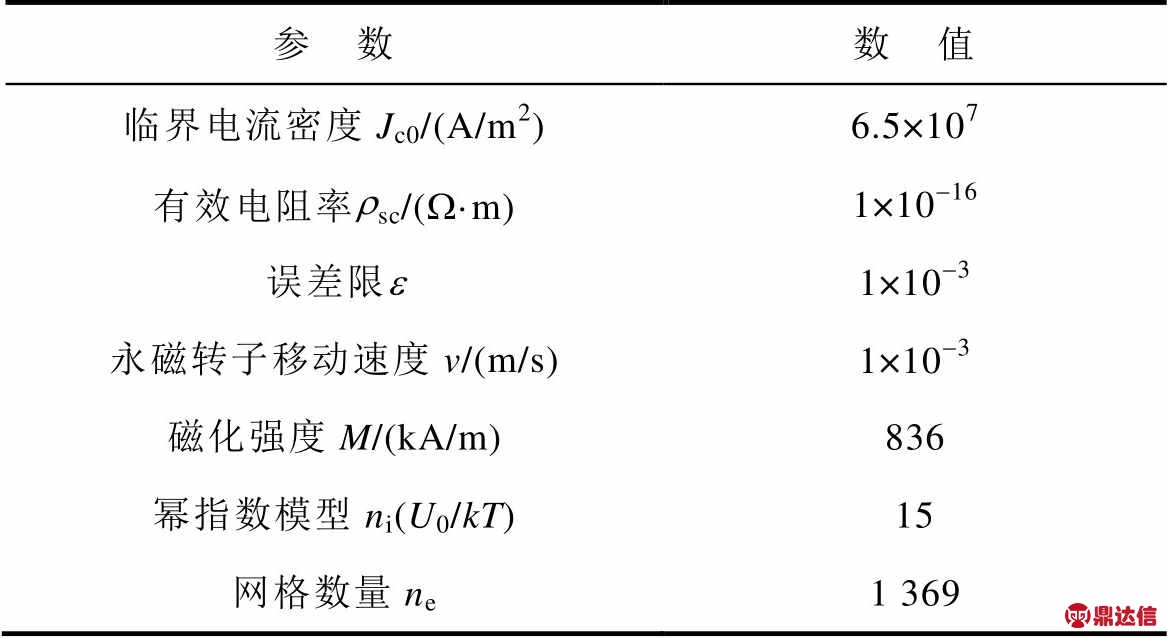
图7 悬浮力数值计算
Fig.7 Numerical calculation of levitation force
表3 数值计算参数
Tab.3 Calculation parameters
图7b中,最大悬浮力达到150N,比测量用的永磁转子(3层永磁环)作用时的最大值大50N。当永磁转子移动至9~10mm区间,其5个磁极均靠近3层超导块材的中间位置(z方向),所以钉扎磁通的数量继续增加,导致感应电流密度Jsc增加,进而悬浮力继续小幅增大。曲线的饱和区较平坦,表明磁通量的饱和度较高,同时也表明通过增加外场能够达到提高悬浮力的目的。但是由于Ⅱ型超导体的钉扎力密度具有饱和特性,所以采用这种方法提高悬浮力是有限的。
图8给出了磁场和超导块材中感应电流的分布。图8a中,大多数磁力线聚集在永磁环的轴向端部即聚磁铁环附近,部分磁通线进入超导块材,沿其边缘回到邻近永磁环的端部即相反极。沿径向穿透超导块材内部的磁通线很少,大量的磁力线被限制在两种较小的气隙中:永磁转子与超导定子之间的气隙和超导环之间的轴向气隙。注意到感应电流主要分布在超导块材边缘(见图8b),所以较大的电磁力作用到超导块材的边缘部分,这也是在样机运行期间超导块材边缘易产生裂纹的原因之一。这种情况对外转子型的径向型超导轴承影响较大,对应移动距离为6mm、8mm和10mm时的感应电流的数值和面积较大,表明在这些位置上的悬浮力较大,这与测量和计算的结果是一致的(图8中的i、j、k、l、m、n分别表示永磁转子位移为0mm、2mm、4mm、6mm、8mm、10mm)。
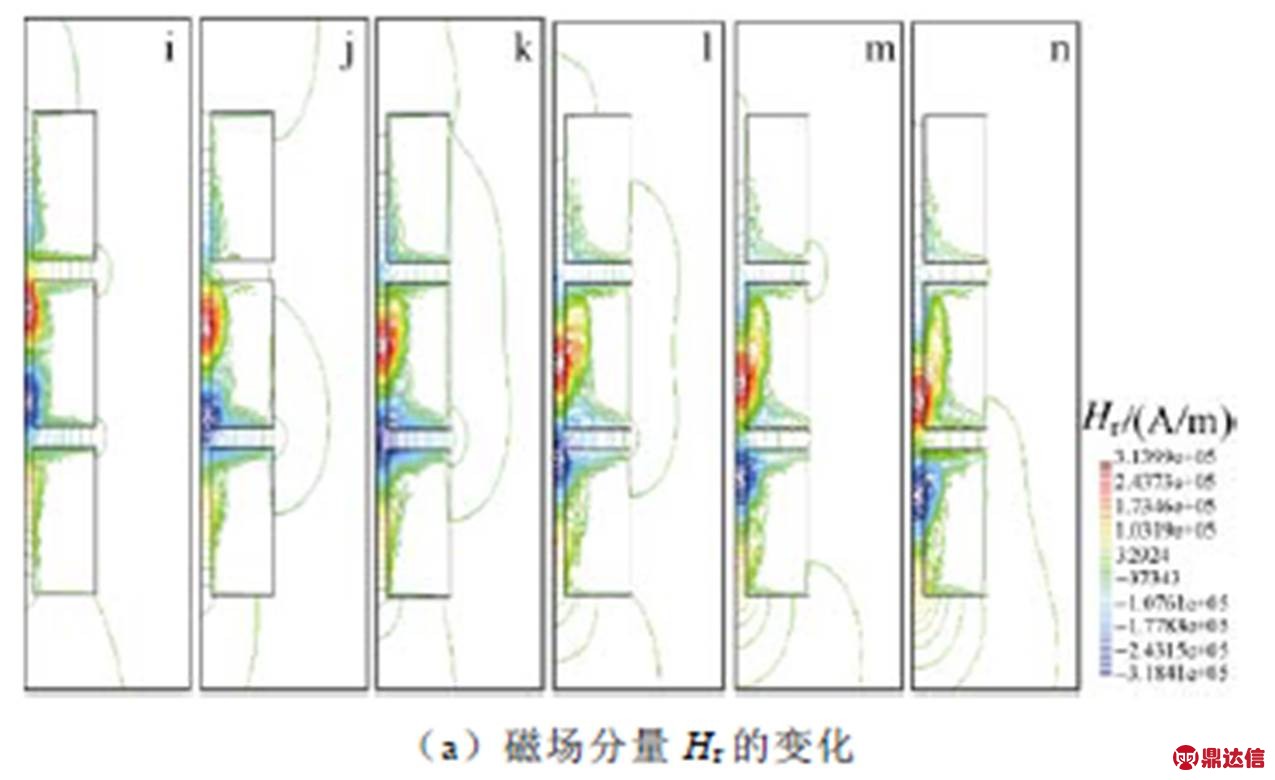
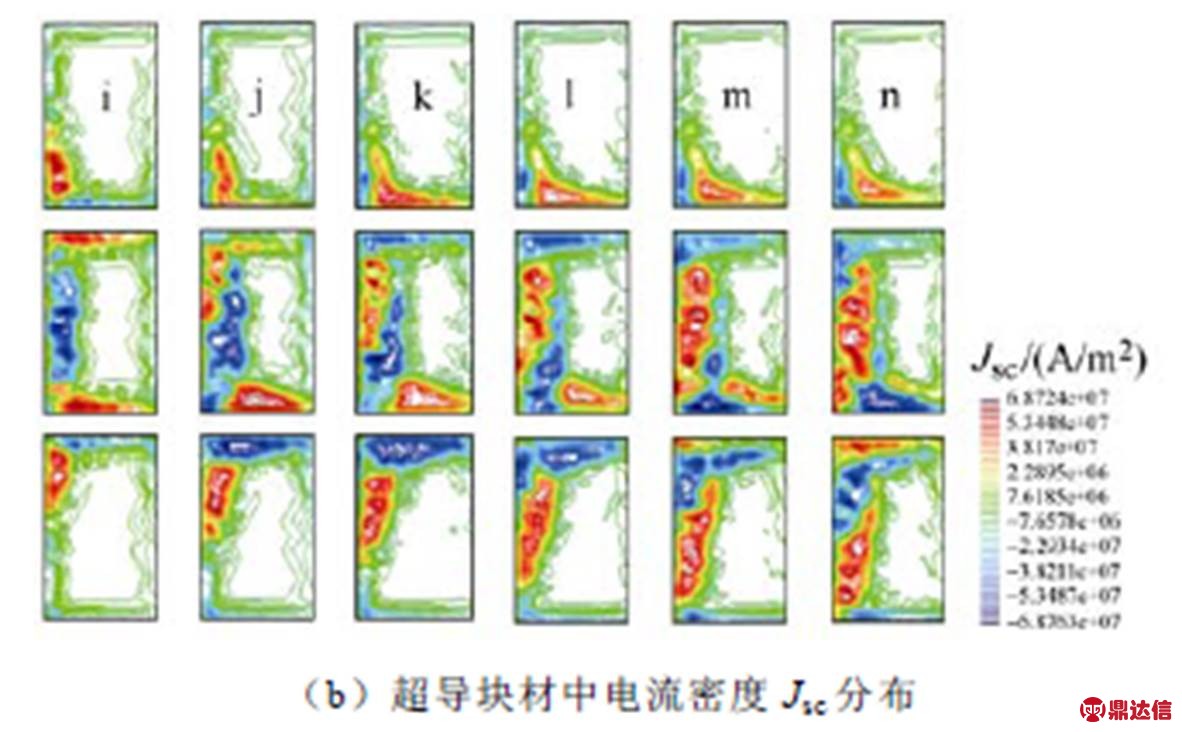
图8 悬浮过程中超导轴承的电磁行为
Fig.8 Electromagnetic behavior of the HTS bearing during the levitation process
3 转子动态旋转测试及其特性分析
3.1 转子自由旋转特性分析
当超导飞轮储能系统的转子自由旋转时,永磁电机作为发电机运行(即负载),其定子绕组两端将产生感应电压。由于负载转矩和旋转损耗的作用,转子速度不断下降,同时绕组两端感应电压的幅值和频率亦发生变化。图9a所示为不同稳态速度下的自由旋转曲线。可以看出稳态速度越高,减速率越大。速度衰减过程可根据减速率的不同分为三个阶段,分别称为起始阶段、中间阶段和结束阶段。在起始阶段,减速率的斜率最大,然后逐渐变小;在中间阶段,整体上减速率较小;在结束阶段,速度衰减较慢且减速率曲线相对最为平坦。例如,稳态转速5 000r/min时,前40s(即起始阶段),转速大约降低到稳态转速的一半,平均减速率为-123.5r/min/s;40s之后(即中间阶段),速度衰减逐渐减慢,平均减速率为-61.4r/min/s;80s时,速度约降低了稳态速度的1/4;在结束阶段,特别是最后10s,速度衰减值仅为69r/min,平均减速率为-14.7r/min/s。
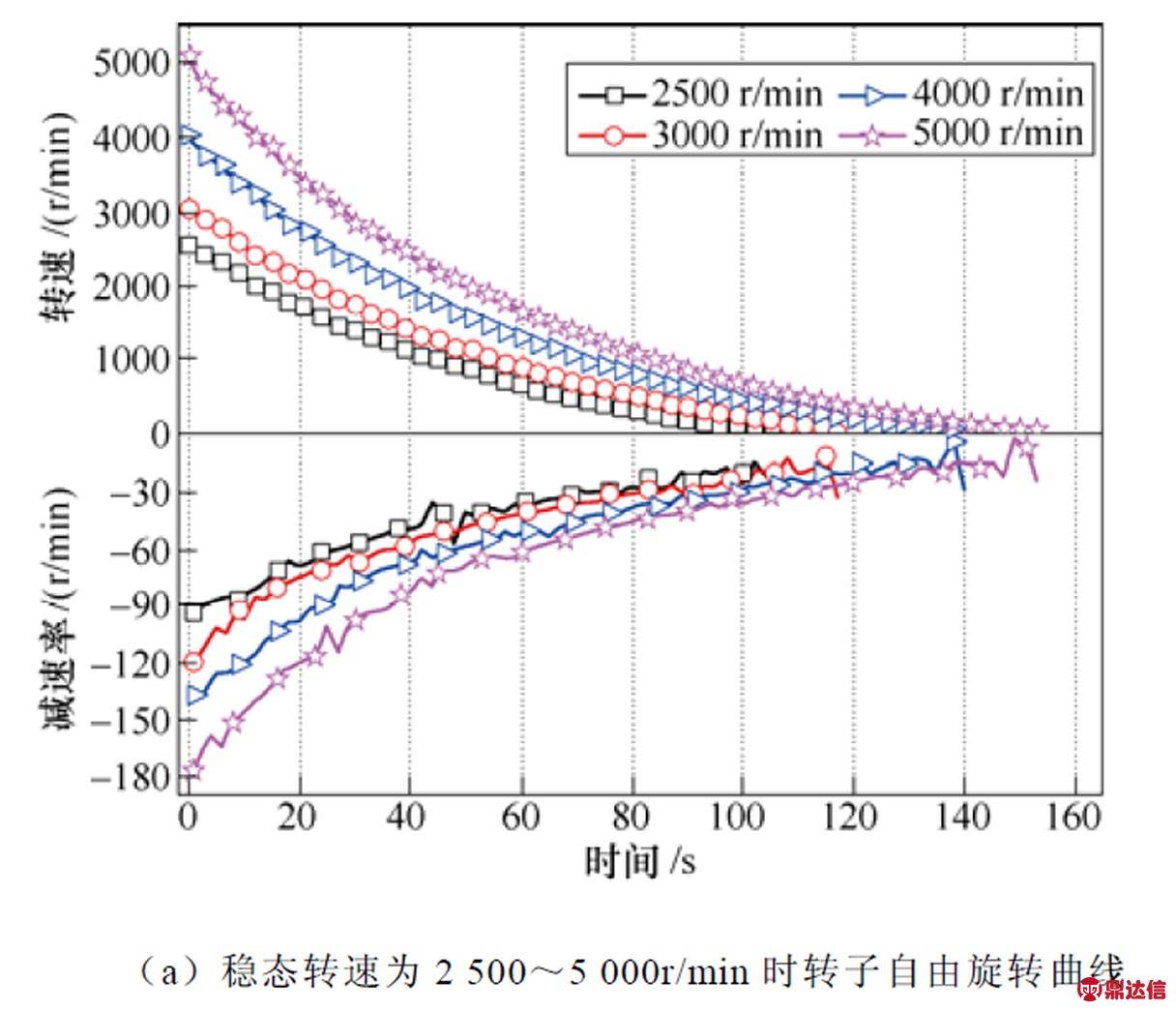
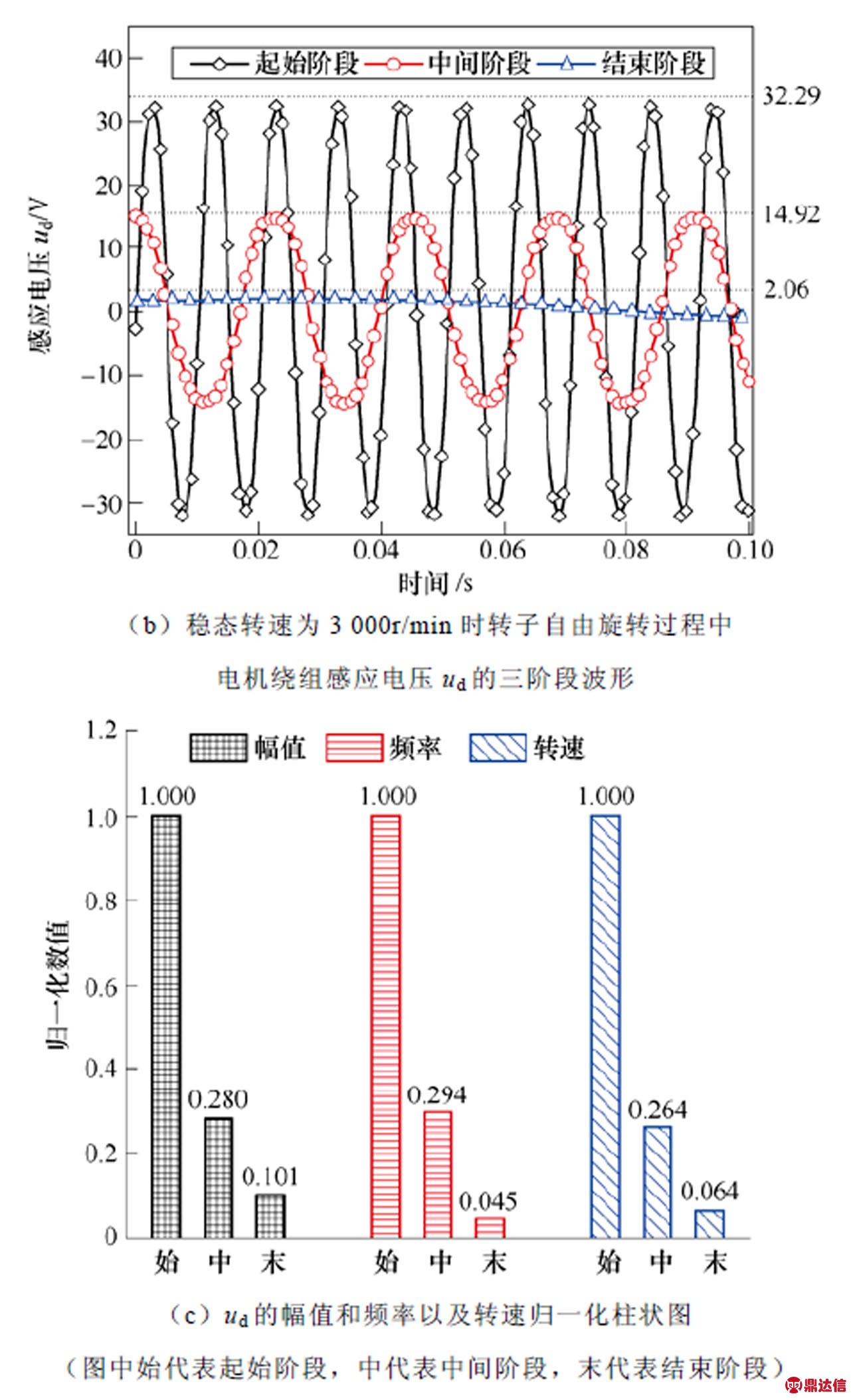
图9 转子在稳态转速下的自由旋转特性
Fig.9 Characteristics of free rotation of totor at steady-state speed
为研究电机定子绕组的感应电压ud随转子自由旋转(即转速衰减)的变化规律,分别取起始阶段、中间阶段和结束阶段的0.1s的ud曲线进行比较,如图9b所示。在起始阶段0.1s(0~0.1s时刻),ud的平均振幅和频率是三段曲线中最大的,其最大幅值为32.29V,平均频率为85Hz。在中间阶段内0.1s(40~40.1s时刻),当转速降至1 350r/min时,ud的最大幅值为14.92V,平均频率为25Hz。在最后阶段,当转速下降到206r/min时,ud的振幅和频率变得非常小(见图9b),其最大幅值为2.06V,平均频率为3.84Hz。发电机感应电动势的有效值应与转速(或频率)成正比,而超导飞轮储能系统的转子阻尼复杂,在自由旋转过程中转速不断下降,感应电压亦不断减少,而平均感应电压与平均转速(或频率)的比例关系不明显。
对上述数据归一化处理,ud的幅值和频率以及转速的变化趋势如图9c所示。ud幅值和频率的下降率与转速的下降率在起始阶段到中间阶段几乎相同,均下降到最初的28%左右,下降最快的是转速,为26.4%。从中间到结束阶段,三者之间的差异逐渐增大,其中ud的频率减少最快,约为25%,而其幅值下降最慢,约为18%。总体而言,从中间到结束阶段的3个物理量的下降率远小于从起始到中间阶段。这种现象与转子振动减小直接相关,即振动与转速成正比。当转速减小时,转子振动减小,转动更加平稳。由于在起始阶段感应电压的平均幅值最高,输出功率最大,因此为样机放电的首选阶段。拓展起始阶段的时长对提高超导飞轮储能系统的性能非常重要。
对于超导飞轮储能系统而言,转子旋转造成的损耗主要来自以下四个方面:①电机转子产生的电枢及外壳中的涡流损耗和磁滞损耗;②不锈钢杜瓦和内壁的涡流损耗;③聚磁铁环的涡流损耗;④由永磁转子产生的超导块材的磁滞损耗和涡流损耗。对于第①类和第②类损耗,可以采用新材料或改进生产工艺的方法来减少,例如,采用由非晶体材料制成的薄片来制造永磁电机的电枢和铁心等。对于第④类损耗,可以采取降低超导块材的冷却温度(过冷法)或使用具有相似物理性质的超导块材等方法有效减少。
3.2 飞轮转子动态径向振动特性
通过一组相距90°的电涡流传感器检测主轴运动时的径向位移(分别为x和y方向)。两个电涡流传感器的探头安装在联轴器下端的支架上,电缆线连接相应的前置器,最后由前置器转化为0~5V的电压信号传送到上位机。
由于转子和电机轴之间通过联轴器柔性连接,所以转子可以在4个自由度上运动。转子的运动(非旋转运动)受到超导轴承产生的轴向和径向刚度来约束,因此转子的振动不可避免。在设计系统时,转子的共振点设计为800r/min和13 000r/min。
当样机转子稳定运行在3 000r/min时,在任意选定的0.5s时间内,其在x方向上位移的波动范围为-0.15~0.17mm,在y方向上为-0.35~0.35mm,转子在3 000r/min稳态运行时的径向位移如图10所示,均在0~0.4mm的范围内,并且在y方向上的振动更明显。从图10中亦可看出,径向位移有时会突然增加,这种现象主要是由于永磁电机的转矩脉动造成的。另外,飞轮本体的不平衡(包括其静态和动态不平衡)、转子和电机轴之间的同心度以及超导钉扎系统的阻尼特性均可导致或影响转子的振动。采用xy幅值绝对值平均值的二范数来表征转子的振动幅度,当稳态转速为2 500~5 000r/min时,转子振动变化情况如图11所示。从图11可以看出,在共振频率以下,x和y方向的振动随着转速上升显著增加,可能导致转子轴和保护轴承之间产生摩擦力并逐渐增加,这也是转子的转速不能持续上升的原因之一[22]。因此,增加超导轴承系统(包括超导轴承、永磁轴承、有源轴承和磁阻尼器等)的径向刚度来抑制转子径向振动的幅度是提高系统转速的有效途径。
图10 转子在3 000r/min稳态运行时的径向位移
Fig.10 Radial displacement of the rotor at the steady-speed of 3 000r/min
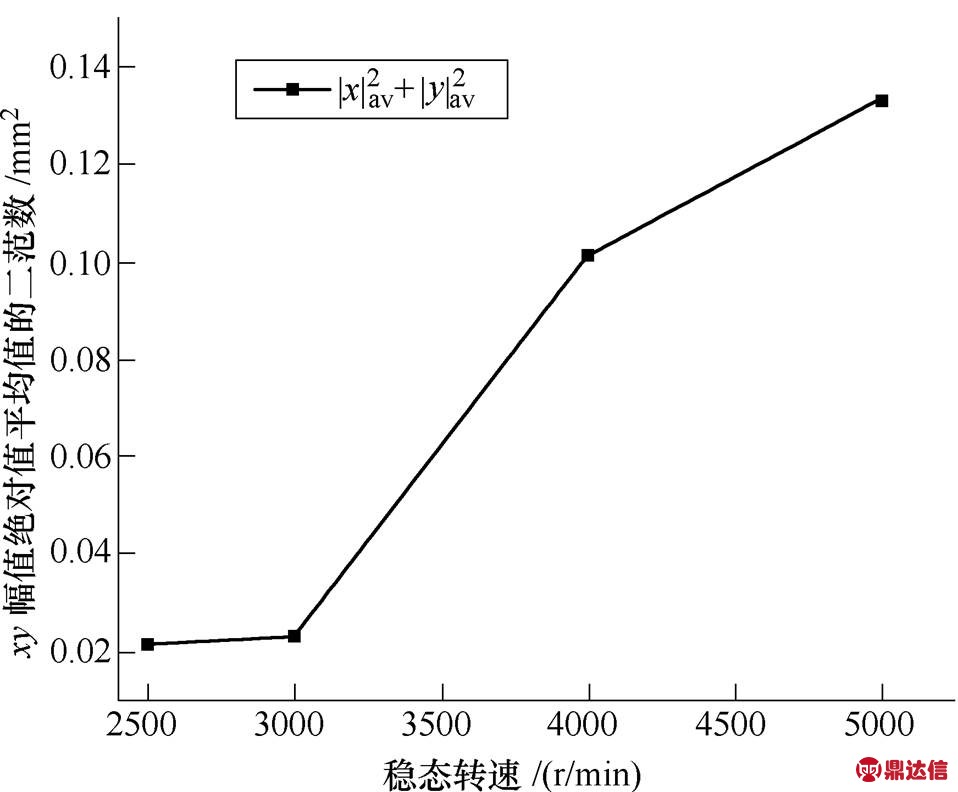
图11 不同转速下xy方向振动幅值变化
Fig.11 Vibration amplitude in x- and y- direction at different steady speeds
4 结论
本文建立了一台小型径向型超导飞轮储能系统样机,测量了两种超导定子的悬浮力。采用所建立的数学模型对其超导轴承的磁场和电流分布进行了研究,结果表明在样机的运行过程中,大部分磁力线被限制在两种气隙中:一种是在永磁转子和超导定子之间(径向);另一种是在相邻两个超导环之间(轴向)。超导块材中的感应电流主要分布在其边缘,即较大的电磁力作用于它的边缘,可能会导致或加剧相应部分的裂纹。这种情况将会对外转子型超导轴承产生较大影响。测量了转子在2 500~5 000r/min稳态速度时的自由旋转并分析了其旋转特性,表明振动与旋转特性密切相关,也是转子转速不能持续上升的原因之一。本样机能够实现飞轮的静动态超导磁悬浮、充电和放电等功能,为下一步研制大型超导飞轮储能系统提供了重要的设计依据。


