
摘 要: 由于运维时间长,RZB钻孔应变仪存在元器件老化、材质蠕变等问题,使传感器性能不断发生变化,需要定期对其进行原地静态物理标定。目前采用的以压电陶瓷为核心的静态物理标定方式存在迟滞、蠕变、非线性等缺陷,使标定结果精度差、误差大。本文设计了以陶瓷马达为核心、光栅传感器作为反馈、RS485总线为基础的远程线性标定机构,实现了RZB钻孔应变仪原地线性标定功能。在实验室开展原地线性标定模拟试验,传感器满量程的标定数据结果表明,标定分辨率达到2 μm,线性度优于1%。
关键词: 钻孔应变仪;原地标定;陶瓷马达
RZB分量式钻孔应变仪自20世纪80年代起,在全国多省开展了台网建设与观测,可以记录到清晰的固体潮汐和地震孕育过程中的地壳形变,在大地测量和地球物理领域发挥着重要作用[1-2]。但也存在原地标定、零漂、防雷击等问题[3]。
自仪器研制初始,就设计了基于比率臂电路的现场手动电气标定功能,可以对测量电路的自井下前置放大器,到主放大器、相敏检波器,至最后输出级的系统增益进行标定,消除信号发生器幅度变化的误差,获得准确的记录格值。由于比率变压器性能优异,长期稳定性好,为系统进行精确标定提供了可靠的保障[4]。随着仪器数字化的改进,比率臂测量电路被数字化测量电路替代,而采用压电陶瓷为核心的静态物理标定。但由于压电陶瓷自身的线性度、精度等原因,存在标定误差不确定性,无法实现RZB分量式钻孔应变仪的原地线性标定,也无法获得传感器的全量程标定数据,以准确地获得灵敏度系数、线性度等性能指标的参数。
RZB分量式钻孔应变仪原地标定向原地线性标定推进,是仪器科学化、专业化的必经之路。随着微动机构及光栅传感器的小型化、精密化,为其在狭小空间内使用提供了可能。最新研制的具有原地线性标定功能的传感器可以开展分量式钻孔应变仪原地线性标定工作,从而确保观测数据量值的准确性、可靠性及可比性。
1 标定现状及问题
1.1 标定原理
RZB分量式钻孔应变仪采用三端差动式电容传感器,其3块平行极板构成两个差动变化的电容器,传感器结构如图1所示。传感器安装在弹性钢筒探头壁上,通过特种水泥与钻孔周围岩石耦合,当弹性钢筒在地应力作用下发生形变,电容传感器的极板间距会产生相应变化,其电容量随之变化(探头受压发生形变时,d1变小、d2变大;探头受拉发生形变时,d1变大、d2变小)。
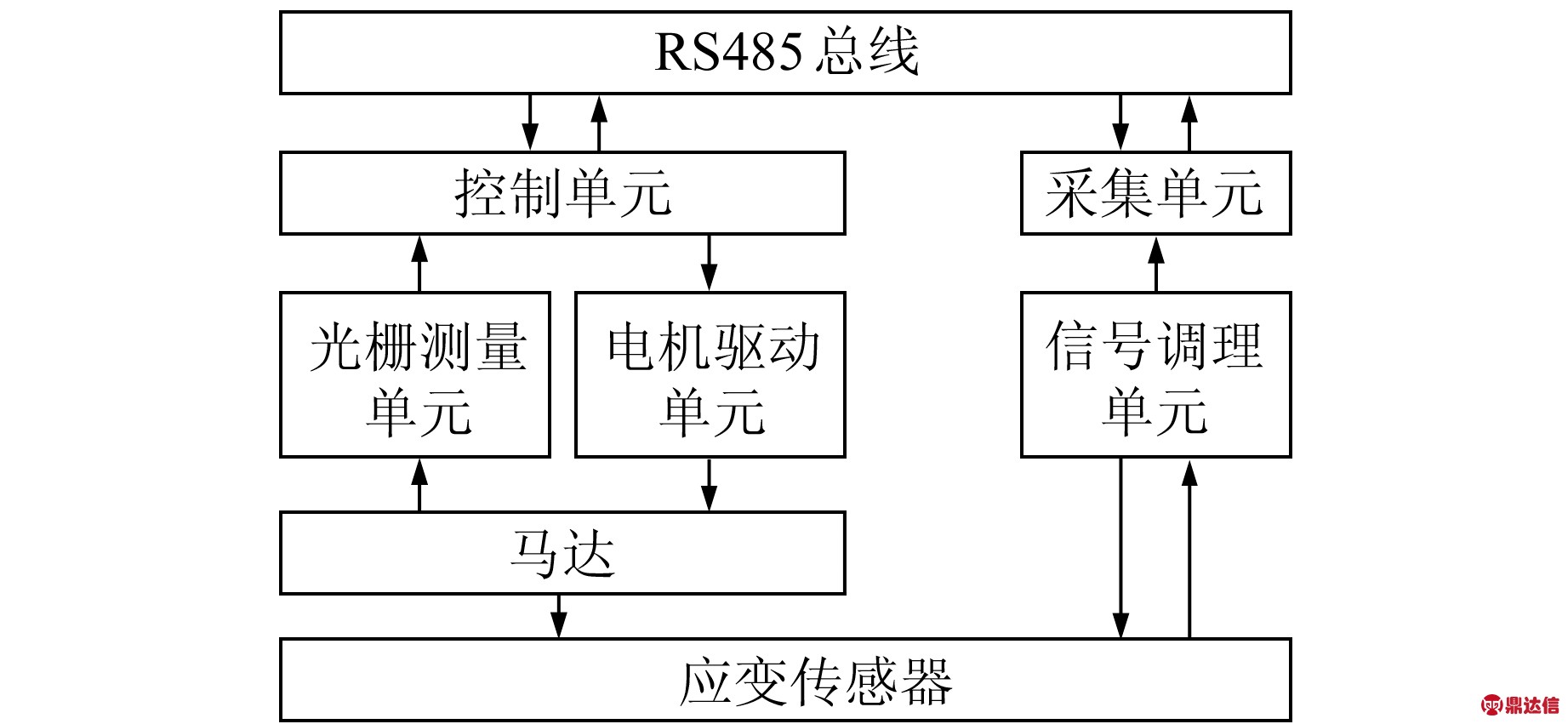
图1 传感器安装示意图
Fig.1 Schematic diagram of the sensor installation
目前使用的以压电陶瓷为核心的静态物理标定系统,就是将一组压电陶瓷片安装在中极板的固定架上(图2)。通过给这组压电陶瓷一个电压v,压电陶瓷组就产生形变s,这个形变传递给中极板,使得传感器的d1、d2发生变化,之后传感器输出量电压读数变化,从而建立压电陶瓷输入电压v、压电陶瓷组形变s、传感器输出电压v之间的关系。
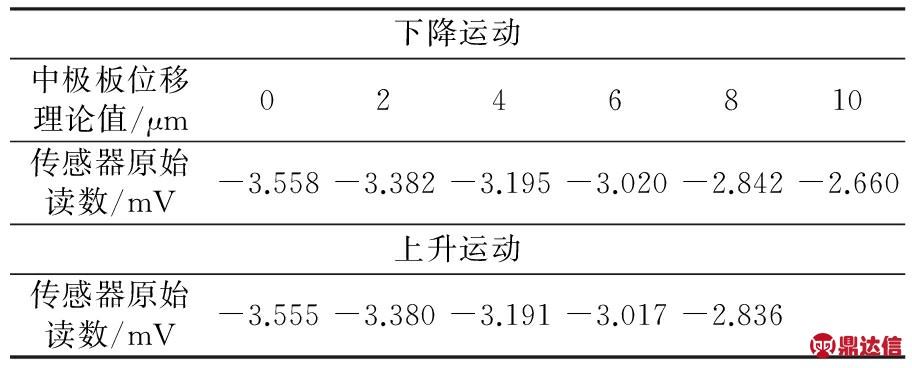
图2 压电陶瓷组安装结构
Fig.2 Schematic diagram of the piezoelectric ceramic installation
1.2 标定应用实例
以RZB分量式钻孔应变仪1号传感器静态物理标定为例,每次标定需要给压电陶瓷加载恒定的直流激励电压。标定中为方便现场取电,选取9 V激励电压,每次加载激励并静置1 min后,记录传感器输出电压变化量,完成一次标定;然后将压电陶瓷接地,并静置1 min,充分卸载激励电压,再进行第二次标定。每次标定记录3组标定值,结果见表1。
表1 原地静态物理标定数据
Tab.1 Calibration data of the sensor
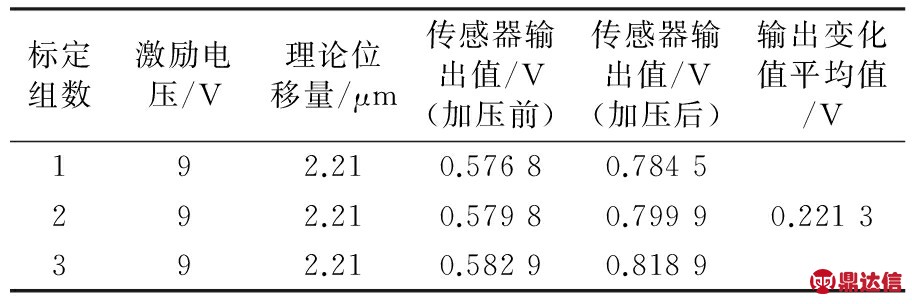
表1中理论位移量为压电陶瓷在9 V激励电压条件下的伸缩量,由传感器装配前实验室测定。压电陶瓷在9 V激励电压下的位移为2.3 μm,从而建立传感器输出变化量与形变的对应关系,获得其观测系统的灵敏度系数(2.21 μm/0.221 3 V),完成系统静态物理标定工作。
1.3 问题分析
1)压电陶瓷材料自身问题。由于压电陶瓷存在迟滞、蠕变、非线性等特性,其中迟滞特性是指压电陶瓷升压曲线和降压曲线不重合,它们之间存在位移差。如图3所示,其主要特点是系统下一刻的输出不仅取决于当前时刻的输入和输出,还取决于历史输入(经过非转折点的迟滞曲线的走向由相应的历史输入决定),压电陶瓷的迟滞环是不对称的,即上升轨迹和下降轨迹之间没有对称轴[4]。
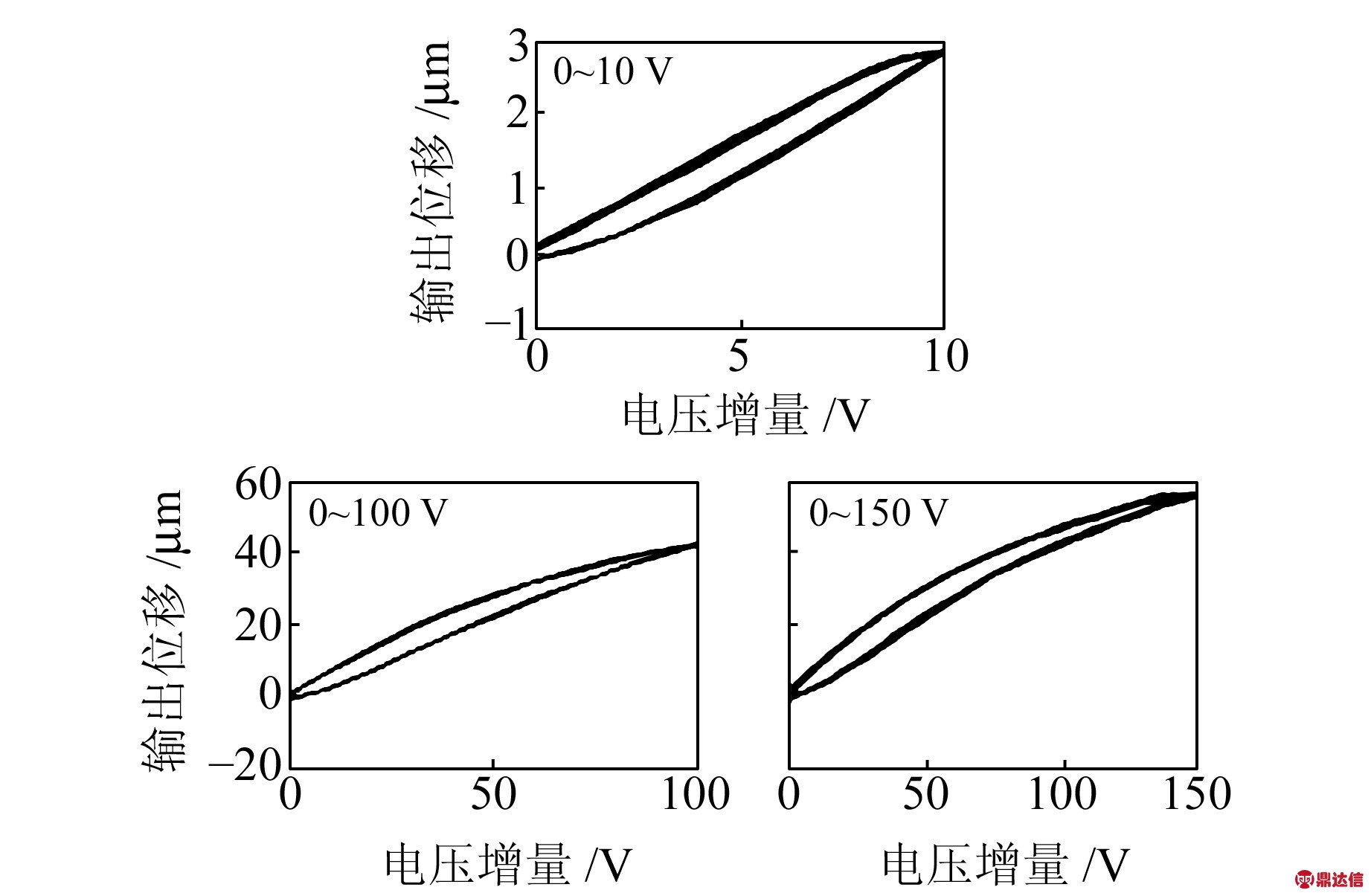
图3 不同驱动行程迟滞曲线
Fig.3 Hysteresis curve of different driving stroke
由压电陶瓷的特性曲线可知,电压-形变线性的重复性精度较差。因此,只能开展如§1.2的标定,给出一个固定激励电压,获得一个传感器输出变化值,从而勉强完成物理静态标定功能,无法通过一组激励电压获得一组传感器输出值,进行连续的原地线性标定工作。
2)目前采用的静态物理标定系统是开环控制系统,压电陶瓷的实际位移量未能被检测,激励电压对应的位移量是通过理论计算和实验室测定的,存在精度不可知、误差不确定的问题。
2 原地线性标定系统
2.1 原地线性标定系统的构建
系统选用国产的HF1陶瓷马达,并配用直线度优于1 μm的精密滑块及250 nm光栅传感器构建RZB分量式钻孔应变仪传感器原地校准系统。压电陶瓷马达是基于压电现象产生超声驻波的原理而开发的,应用于运动控制领域的精密电动机,给陶瓷马达输入驱动电压后,压电陶瓷产生压电现象,同时发生的纵向延伸和横向弯曲模式的激励在陶瓷指尖狭小的椭圆通道里产生二维声波,压挤靠着一个陶瓷条的陶瓷指尖产生一个驱动力,驱动与之接触的陶瓷条上精密导轨,使固定在精密滑块上的电容极板2产生直线运动。该陶瓷马达性能如下:1)最小分辨率50 nm;2)最小步长0.1 μm;3)运动速度200 mm/s;4)最大推力4 N;5)定位后没有一般伺服电动机存在的晃动问题;6)重量轻(20 g)、体积小;7)行程10 mm。
原地线性标定系统与传感器集成后,可以在外径102 mm的筒体内实现安装应用。在狭小空间内实现安装是RZB分量式钻孔应变仪原地线性标定功能实现的基础。
由于选用光栅传感器作为反馈部件,可以精确测量中极板位移变化量,进而确保RZB分量式钻孔应变仪原地线性标定的精度及线性度。
2.2 原地校准系统的远程控制
RZB型钻孔应变探头一般安装在几十m甚至上百m的钻孔里,为了能实现原地线性标定,本系统设计了基于现场总线技术的远程控制单元,其结构框见图4。本单元分为两个部分:电机控制部分和数据采集部分。其中,电机控制部分主要包括电机驱动器、光栅测量单元、运动马达,采用集成光栅测量单元作为马达控制的反馈来实现差动式电容传感器中极板位移的精确控制,从而控制被测传感器的工作状态,达到远程校准的目的;数据采集部分由信号调理单元、数据转换单元、通信模块组成,用于实时测量当前传感器输出信号,并通过总线发送到地面上位机。
电机控制与数据采集的通信采用RS485总线,节约电缆成本的同时增加信号传输的可靠性和抗干扰能力。在实际工作过程中,只需上位机发送对应的控制指令即可实现电容传感器的微位移和实时测量,以实现井下传感器的原地标定。
图4 远程控制单元结构框
Fig.4 Block diagram of the remote control unit
2.3 原地校准系统实验室应用实例
具有原地线性标定系统的RZB分量式钻孔应变仪还处于长期稳定性、可靠性相关试验阶段,并未在台网实际使用。我们在实验室及山洞内进行模拟台站现场的原地线性标定工作。在全量程内进行2 μm步长的线性标定,相关试验数据见表2。
由表2数据通过Origin软件进行线性拟合得到图5。拟合结果y=0.092 62x-3.746 25,线性度r为0.999 72,标准差STD为0.054 21。
通过原地线性标定数据可以得出:1)原地线性标定系统分辨率优于2 μm;2)原地线性标定系统线性度优于1%。通过原地线性标定的数据可以准确了解传感器的灵敏度、线性度参数,有利于准确了解长期工作仪器的性能,提高对观测数据的科学认知和应用。
如在学习“第二次世界大战”时,为了让学生感受到战争的残酷与法西斯势力的邪恶,笔者利用多媒体为学生播放了有关的战争视频活动,学生直观的感受到当时战争的惨烈,更投入到了对第二次世界大战的知识学习中,激发了学生的学习积极性的同时,有效的提高了历史课堂的教学有效性。
表2 RZB分量钻孔应变仪原地线性标定数据
Tab.2 In-situ linear calibration data of the RZB-type borehole strain meter
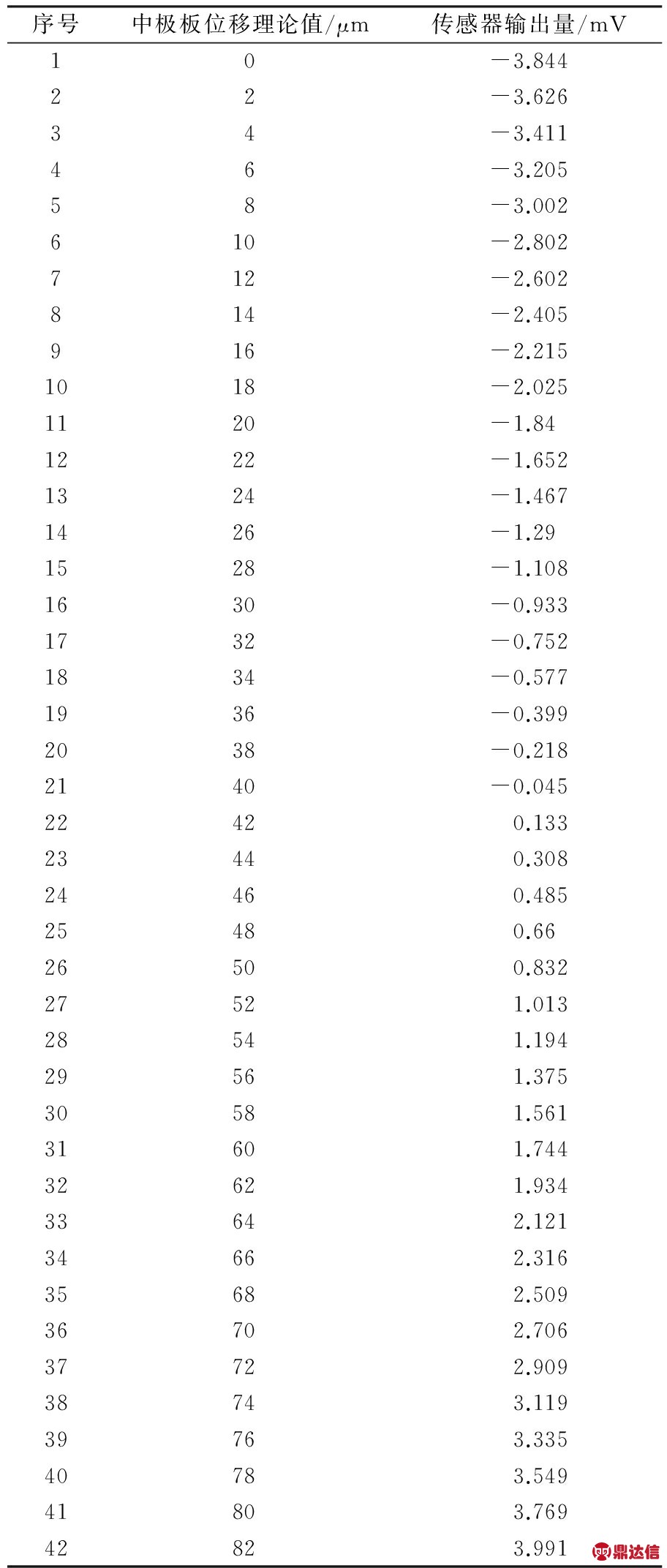
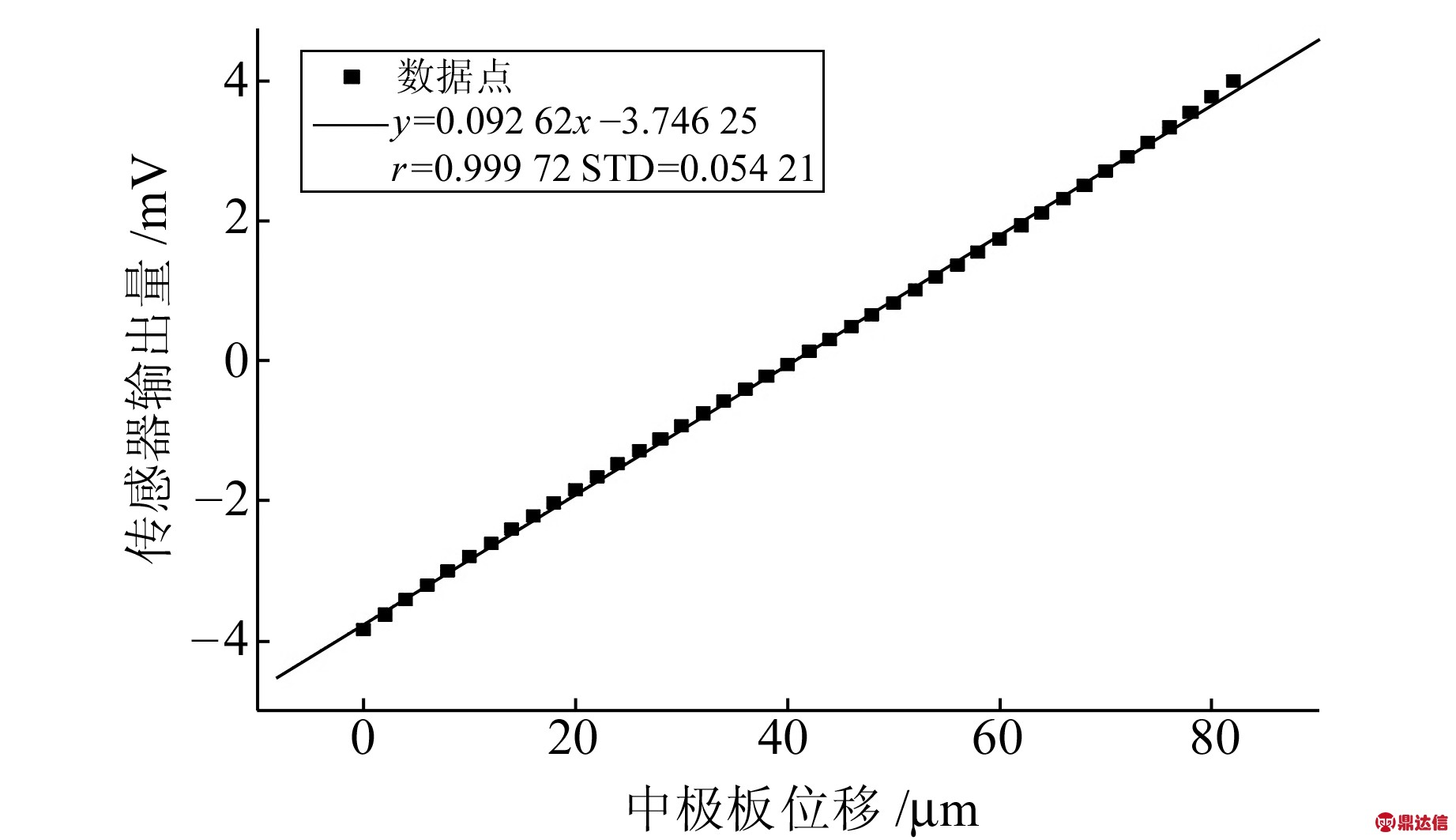
图5 标定数据线性拟合
Fig.5 Linear fitting curve of calibration data
表3 中极板上下位移标定数据
Tab.3 Calibration data of up and down displacement of medium plate
3 结 语
基于陶瓷马达及光栅传感技术为核心的微位移机构,通过RS485总线实现远程控制,构建了RZB型钻孔应变仪原地线性标定系统。在实验室模拟了分量式钻孔应变仪原地线性标定过程及功能,效果较好。但实验室模拟测试只是阶段性的成果,还需要在一定条件下开展现场的试验才能进一步考察此机构的实际应用指标。此外,由于此机构具有计量溯源性能,可进一步通过计量部门开展计量校准工作,使之具有量值传递性,为推进RZB分量式钻孔应变仪向科学型、计量型仪器发展奠定基础。


