
摘要:利用光栅相位法可以实现物体三维形貌的测量。首先,使用投影机将计算机编程生成的正弦光栅图投影到物体表面,并采集获得4幅变形的正弦光栅图;再根据相位和高度的关系结合四步相移算法解出物体三维形貌。由实验结果可知,光栅相位法在测量物体三维形貌时具有较高的精度,并能实现非接触式测量。
关键词:光栅投影;相位展开;三维形貌测量
基于光栅相位法的三维测量技术广泛应用于自动检测、质量控制、医疗诊断等工业过程中。该方法利用LED作为光源,与激光相比具有对测量环境要求较低等优势,这有利于提高测量精度和形成测量系统的产品化。基于光栅相位法的三维形貌检测技术能够满足系统的快速性和高精度等要求,已成为一种发展快、应用广、有潜力的三维数据采集方法。
1 光栅相位法基本原理
光栅相位法是一种非接触式的现代检测技术,由于其测量精度比较高,且测量原理比较容易理解,测量系统也比较容易搭建,近年来在缺陷检测和物体三维形貌测量等方面得到广泛应用。
光栅投影原理[1]如图1所示,图中曲线为待测物体表面,底层为基准面。CCD相机和投影仪以一定的夹角放置,M是投影仪的出瞳中心,N对应CCD的入瞳中心,两者之间距离为d。M和N两点到参考平面的距离均为L。从M和N两点出发的光轴相交于参考平面上的O点,O点即为坐标原点。系统硬件部分运作后,正弦光栅被投射到被测物体表面,从而得到变形的正弦光栅图,其变形程度与物体表面的凹凸起伏的高度相对应,条纹的变形又与相位的变化相对应。

图1 光栅投影原理图
1.1 物体高度与相位关系
实验是基于PMLAB DIC-3D系统开展的,系统由支架、CCD和LED等硬件以及软件部分构成。实验之前,先接通PMLAB DIC-3D系统所有电源,LED光束照射在被测物体上,用投影仪将电脑编程得到的正弦光栅投射到参考平面上,此时得到的光栅图为未变形之前的。再利用CCD相机垂直地进行拍摄[2],参考平面上任意一点(x,y) 处的光强可表示为:

其中,A(x,y)为背景光强度,B(x,y)为光栅振幅,B(x,y)/A(x,y)为光栅条纹对比度,φ0(x,y)作为参考平面光栅相位值,f0是条纹的空间频率。变形光栅条纹的强度I(x,y)可表示为:

式(4)中,φ(x,y)为变形光栅信号的相位。
利用式(2)和(4)计算变形光栅与参考平面光栅之间的差值,相位差与被测物体的高度对应:
由于三角形MDN和三角形CDA相似,则有

由式(5)和(6)得物体高度值h(x,y)为:

相位主值的范围是-π<φ(x,y)<π,因此称为包裹相位[4],然而实际应用中需要将它还原成连续的相位,故对包裹相位进行相位展开[5]。相位展开过程中,首先要针对截断相位进行相邻的像素点比较,然后加减2π*k(k=1,2,3,…),使得相邻像素点的相位值处于(-π,+π)之间。
1.2 相移法(PSM)
相移法的目的是获取相位主值,通过固定相位差和光栅图像的相位差之间的投影解调求出的[3]。由式(3)知,A(x,y)、B(x,y)和φ(x,y)是三个未知量,需要至少三个方程才能解得相位,通过相移法可以得到。笔者采用的是四步相移算法,实现该算法之前需依次将四幅相位不同的正弦光栅图投射到被测物体上,每幅的相移为π/2,四幅光栅条纹图像的光强分别为:
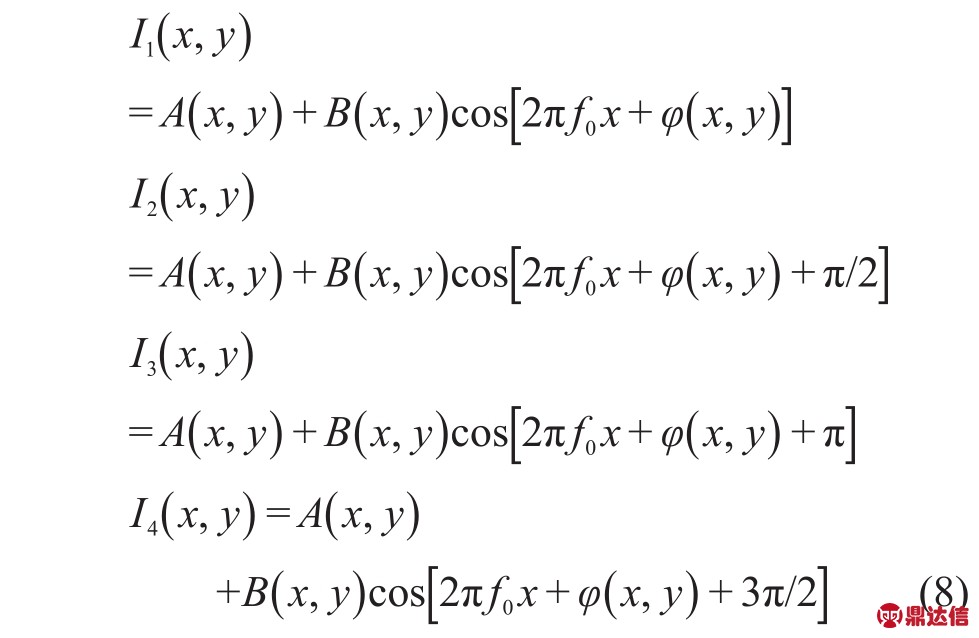
由上求解出相位主值为:
2.1 三维形貌测量
2 实验与仿真
本次实验是基于PMLAB DIC-3D系统开展的,实验系统如图2。实验利用Matlab编程实现的正弦光栅图为投影原图,基于四步相移法的四幅光栅条纹图像如图3所示。
其中,L、d是系统固定的参数,要求出物体点(x,y)处的高度值h,只要求得相位差Δφ(x,y)的值即可,求得所有点的h值后即实现了三维形貌的测量。
实验对象的表面凹凸不平,将其固定在光学支架上,再将四幅具有不同相位差的光栅条纹图投影到被测物体上,同时,PMLAB DIC-3D系统的CCD拍摄四次投射到物体表面的光栅条纹图并
保存到计算机中,如图4所示。
图2 PMLAB DIC-3D实验系统
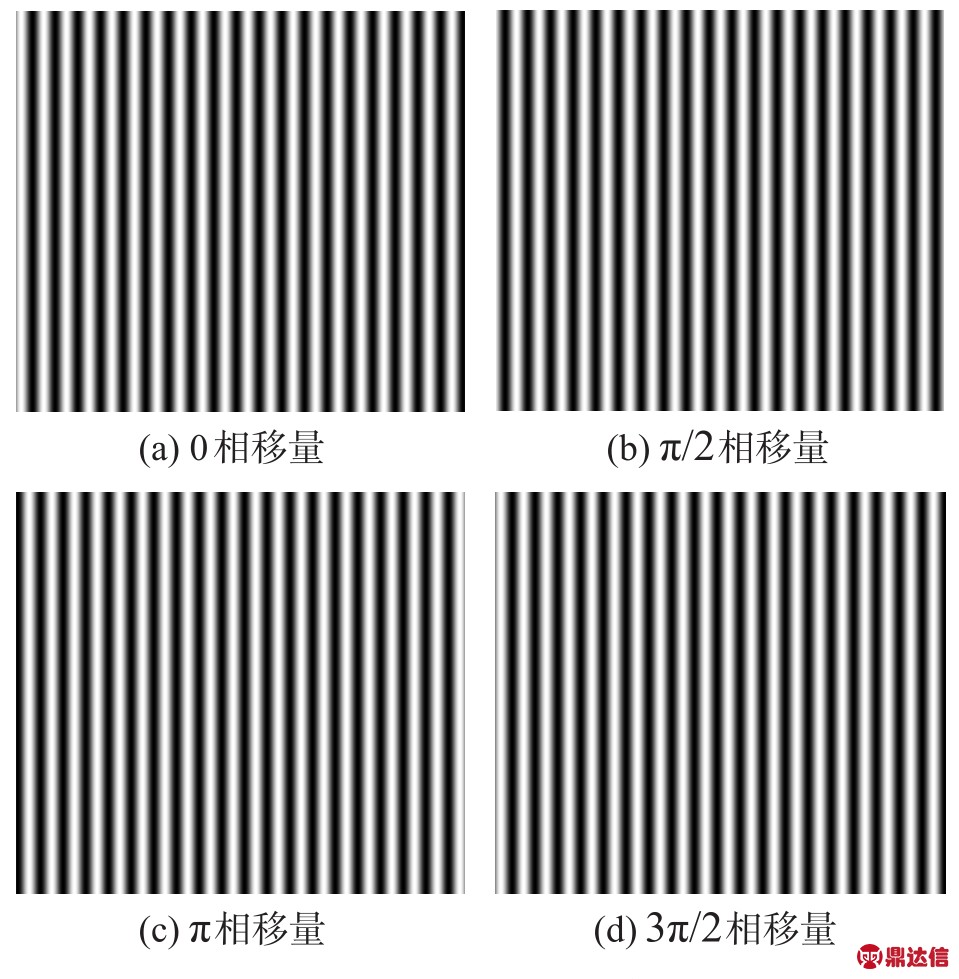
图3 四幅不同相移光栅条纹图
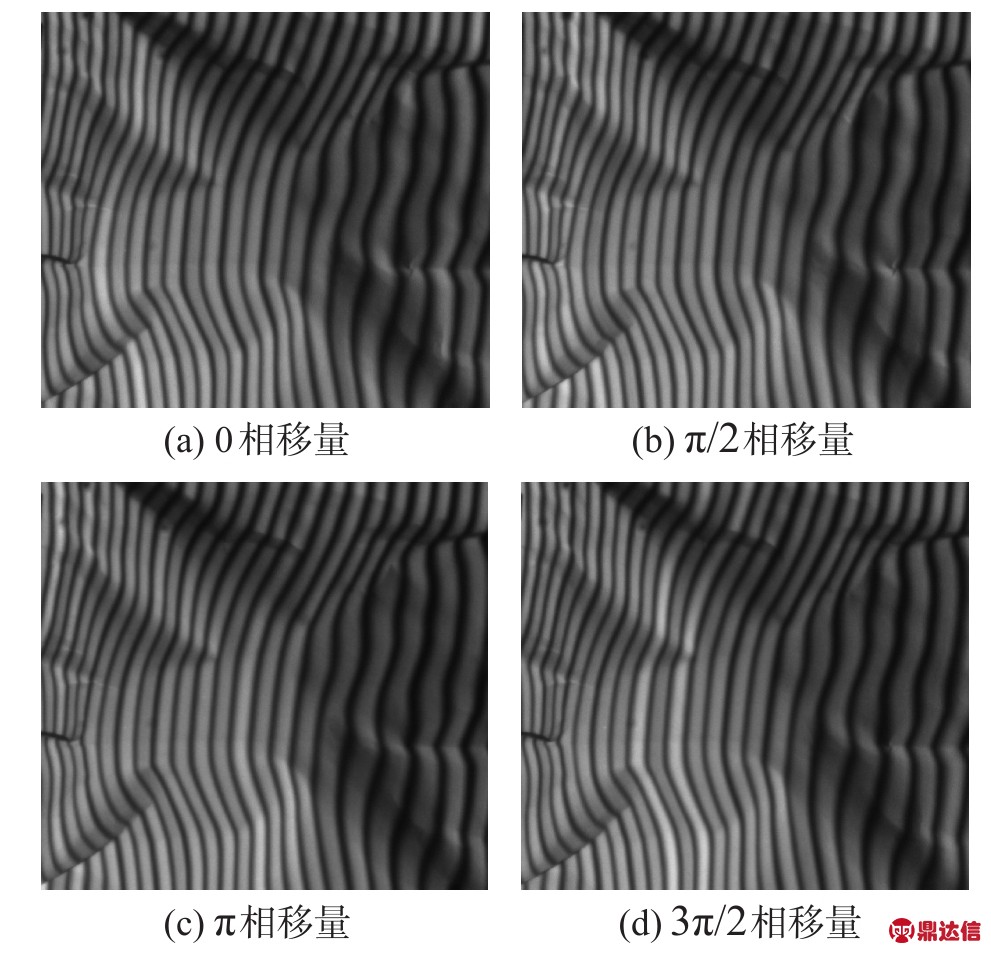
图4 四幅不同相移光栅投射图
物体表面的高低起伏,光栅投射到物体上时生成的是一组具有形变的光栅图。利用相移法对图4中四幅变形光栅图解调出的相位主值图,即包裹相位图如图5所示。通过解包裹算法即相位展开得到的相位展开图如图6所示。
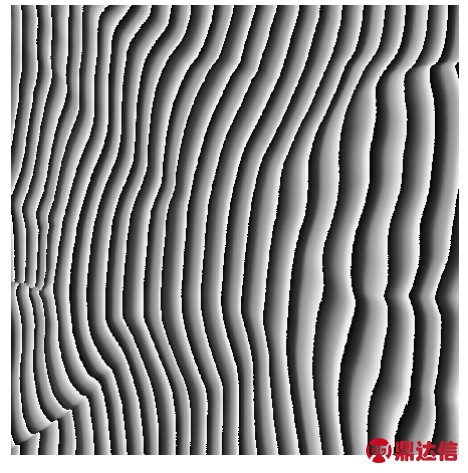
图5 包裹相位图

图6 相位展开图
利用相位展开算法得到了连续的相位差,即物体高度对应的相位和参考平面对应相位差值Δφ()
x,y,然后通过式(7)就可求得曲面距参考平面的高度,最后实现了物体的三维重建,如图7所示。
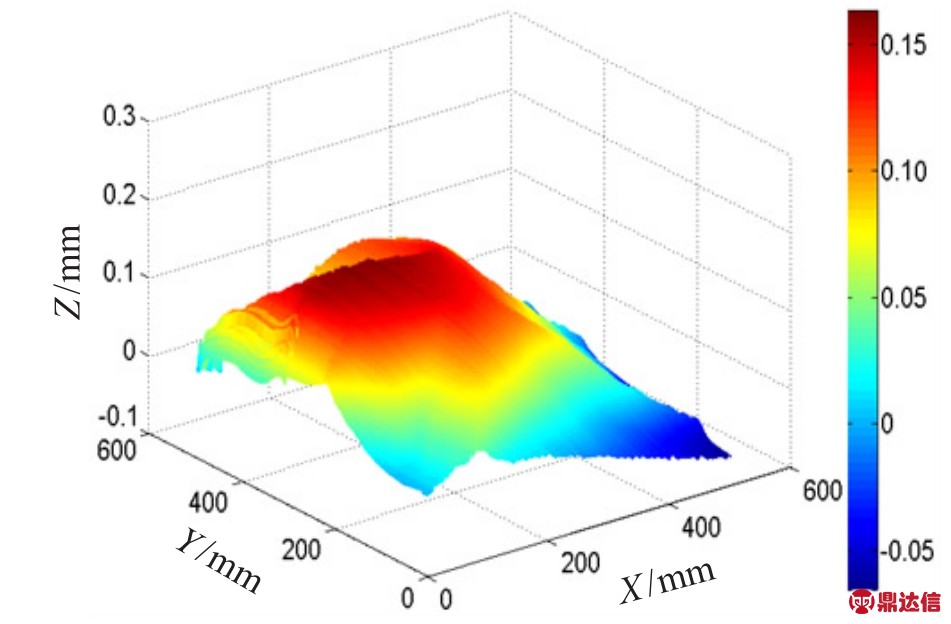
图7 物体三维形貌重构图
2.2 测量结果的误差分析
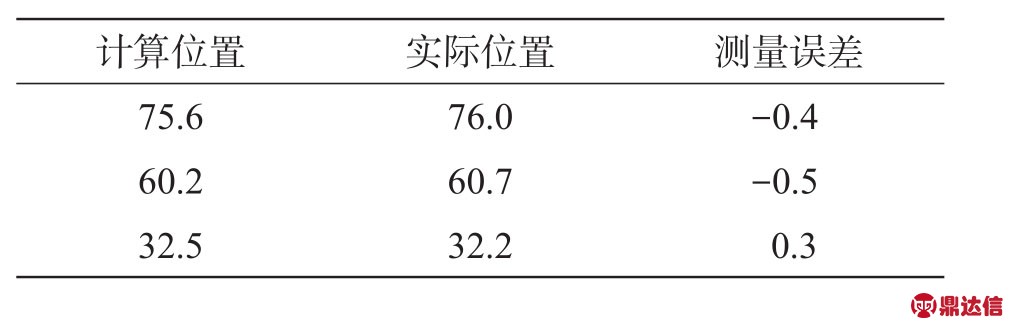
在被测物体表面选取三个位置不同的点,且各点之间等间距,计算三个点的高度误差,测量结果如表1所示。得出的三个点分别为:最高点75.6 mm,第二个点60.2mm,第三个点32.5mm,而实际数据分别为:76.0、60.7和32.2mm,测量误差范围在-0.5~0.3mm之间。与文[6]相比,测量精度较高,说明本系统具有较高的物体三维重构精度。
表1 物体表面不同点的测量结果和误差mm
3 结论
本文利用光栅相位法实现了物体三维结构的测量,利用相位和物体高度的相关性完成测量,并进一步研究了相位展开的算法。通过在Matlab平台上的建模和算法实现,得出了物体的三维形貌图,在此基础上又对实验结果的误差进行了分析,实验证明,该方法具有非接触、速度快、精度高等优点。


