
摘要 为了解决级联式储能系统中储能模组间能量均衡问题,同时提升系统的模块化程度,提出一种分布式能量均衡控制策略。该策略充分利用了双向直流变换器模块化结构的特点,将各子模块采用独立闭环控制。为了使子模组能够独立进行能量均衡,将下垂控制思想以及超级电容荷电状态(SOC)引入到电流闭环中,使子模组能够根据自身SOC状态调整工作电流,进而实现能量自动分布调整,达到均衡控制目的。为了减小模组SOC对系统电流的影响,控制策略中引入了电流校正环节,从而改善系统电流的调整率。该策略不影响储能系统稳定母线电压的能力,同时各储能模组间不需要任何通信,使系统具备了完全的模块化特性。最后,通过实验验证了所提方法的有效性。
关键词:模块化多电平直流变换器 能量均衡控制 双向DC-DC变换器 分布式控制 储能系统
0 引言
超级电容作为一种高功率密度的储能设备,被广泛应用于储能系统中。超级电容模组的耐压值较低,通常需要多模组串联使用以适应中、高压应用场合[1,2]。然而,由于制造工艺、环境温度等原因,串联的超级电容模组在频繁充/放电工况下荷电状态(State of Charge, SOC)会出现不一致。长时间运行下,将导致部分模组出现过充/过放的现象,严重损害超级电容的使用寿命,同时影响储能系统的可靠运行[3]。因此超级电容模组间的能量均衡控制是储能系统中亟需解决的问题之一。
储能系统中的双向直流变换器拓扑结构主要分为传统半桥拓扑及级联模块化拓扑。半桥拓扑结构下,超级电容模组直接串联使用。此时模组间均衡控制策略可以归纳为能耗型均衡及非能耗型均衡两种类型[4-10]。能耗型均衡主要采用高精度功率电阻并联于模组两端,并利用电阻将高能量分布模组中的多余能量消耗掉[4,5]。这种均衡策略控制原理简单,容易实现,但是会导致系统发热严重,降低系统效率。非能耗型均衡控制的主要思路是将高能量模组中的多余能量转移到低能量模组中,从而实现能量在模组中的平均分配。非能耗型均衡主要利用并联电容或者隔离DC-DC变换器来实现。并联电容均衡策略能够采用先进控制算法进行控制,但是其缺点在于当能量在相隔较远的模组间传递时,系统效率较低[6,8]。而采用隔离DC-DC变换器的均衡策略虽然能够解决任意模组间能量均衡的问题,但是这种均衡方式对变压器的设计要求较高,同时随着串联模组数量的增多,无论是采用多绕组变压器还是采用多变压器的形式都将导致均衡系统体积庞大,同时系统控制较为复杂[9,10]。
在级联模块化拓扑结构中,超级电容模组需要通过变换器的子模块进行串联。这种拓扑结构具有开关管的电压应力小、系统无源器件体积小等优点,近年来受到了广泛的关注[11-16],同时针对级联拓扑结构的能量均衡策略也已被提出。文献[12]将能量存储以及能量均衡做归一化处理,提出利用子模组电容荷电状态建立独立闭环,SOC的闭环输出结果直接控制系统电压外环。文献[14]与之相似,采用平均SOC的概念,利用各模组的SOC以及平均SOC直接参与电压外环控制。这两种策略均能够在满足系统运行功能的前提下,根据子模组SOC独立调整各子模组工作电压,实现能量均衡分配。文献[16]提出一种基于电压、电流双闭环以及SOC闭环的储能系统控制策略,该策略将各模组SOC闭环输出结果不断叠加到电流环上,从而使能量均衡与系统电流控制实现解耦。上述策略的共同特点是需共用各子模组SOC信息,但这将导致各子模块间缺乏独立控制能力,因此系统整体的模块化程度较低,同时系统的冗余特性以及可扩展性受到影响。
级联模块化变换器在结构上属于输入串联输出串联(Input-Serious Output-Serious, ISOS)组合系统,而ISOS系统中的均压问题是持续热点[17-21]。文献[17]提出了一种基于电压外环、电流内环以及反馈均压环的多闭环均压控制策略,但该策略对系统参数要求较高,同时易受主功率电路电流影响。文献[19]提出了一种交换占空比的控制策略,较为新颖,但是其应用条件受限于串联模组数量。为提高系统的可扩展性,文献[21]提出了一种分布式均压控制策略,该策略将模块输入电压叠加到参考电压中,因此可根据输入电压调整模块的输出,从而实现模块输入端及输出端均压。该策略增强了系统模块化程度,易于系统扩展。虽然ISOS系统与模块化多电平储能系统存在一定的相似之处,但是无论从具体拓扑结构,还是从应用背景上均有一定的差别。因此ISOS系统中的均压控制策略应用于储能系统中时,仍需要作进一步研究。
传统的基于模块化级联变换器的超级电容储能系统大部分为非分布式控制,这样不仅弱化了系统的模块化特性,同时也降低了系统的可靠性。为此,本文提出了一种适用于模块化多电平直流变换器的超级电容储能系统分布式能量均衡控制策略。该策略充分利用了系统模块化组成特点,对各子模组进行独立的闭环控制,同时根据子模组工作电流与模组SOC间的关系,将下垂控制思想引入到系统中,从而使各子模块根据自身SOC状态调整其工作电流,进而达到子模组间能量均衡的目的。文中首先对模块化超级电容储能系统运行工况与模组SOC状态调整间的关系进行了分析,然后提出了分布式能量均衡控制策略,并分析了该策略的稳定性。最后利用搭建的超级电容储能系统物理仿真实验平台对所提出的控制策略进行了验证。
1 分布式均衡控制原理
基于模块化多电平直流变换器(Modular Multi- level DC-DC Converter, MMDDC)的超级电容储能系统如图1所示。图1中,双向直流变换器由多个子模组SMi(i=1,2,3,…,n)串联组成,n为串联子模组的个数。usci为第i个子模组中超级电容模组电压;Csci为第i个超级电容模组容值;usmi为第i个子模组的输出电压;um为串联半桥的输出电压;udc为直流母线电压;L为系统电感;RL为电感等效电阻;iL为系统电流。

图1 模块化多电平储能系统原理
Fig.1 Schematic of modular multilevel energy storage system
MMDDC通常采用移相控制方式,相邻子模组间移相角度为2p/n,且子模组开关管互补导通。忽略开关死区,充/放电时任意子模组的工作原理如图2所示。

图2 子模组充/放电原理
Fig.2 Schematic of sub-module charging/discharging
由图2可知,超级电容仅在上桥臂导通时进行充/放电,下桥臂导通时该模组处于旁路状态。由此可得流经该子模组超级电容的电流isci与系统电流iL之间的关系为
 (1)
(1)
式中,di为第i个子模组占空比。
超级电容SOC的表达式[22]为
 (2)
(2)
式中,Csci为超级电容容值;Qsci为超级电容额定电荷量。充/放电时超级电容电压变化为
 (3)
(3)
式中,usci,0为超级电容初始电压。
将式(1)与式(3)分别代入到式(2)中可得
 (4)
(4)
由式(4)可知,不同子模组中的超级电容模组SOC由该子模组的占空比决定。因此,当各子模组独立控制时,在保证系统平均电流不受影响的情况下,可通过控制流经各子模组的平均电流实现对SOC的控制,且子模组间互不影响。
为实现能量均衡,系统充电时低SOC的子模组需要以较大的电流进行充电,而高SOC的子模组需流入较小的电流;反之,系统放电时高SOC的子模组需要以较大的电流工作,而低SOC模组则应以较小电流放电。以3个模组为例,不同SOC的子模组在不同工作模式下能量均衡与子模组平均电流间的关系如图3所示。
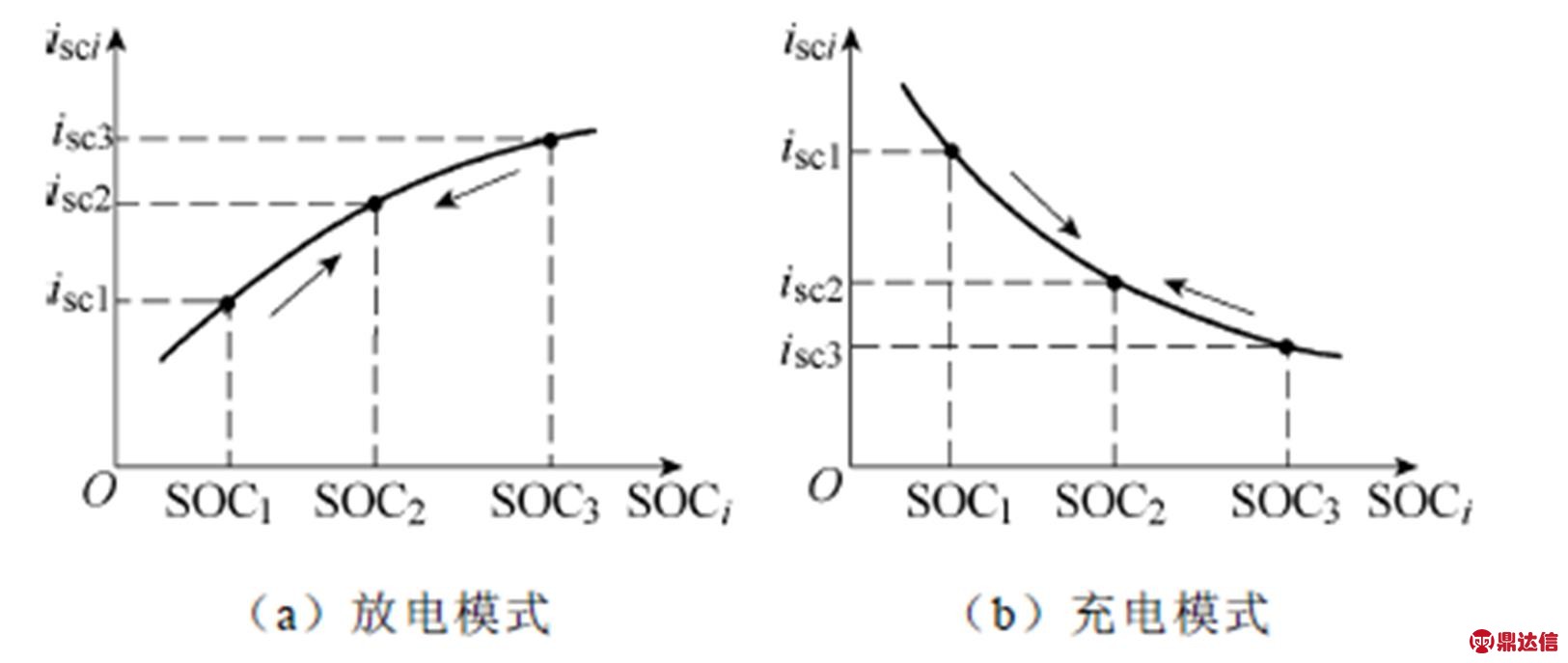
图3 能量均衡与子模组平均电流间的关系
Fig.3 The relationship between energy balancing and sub-module average current
从图3可以看出,能量均衡时,子模组工作电流变化趋势与SOC之间的关系同传统下垂控制特性曲线相似[23],但系统工作在不同模式时,电流调整趋势相反。因此,在保证系统基本功能的前提下,可将SOC状态引入到控制系统中,使各模组能够根据自身SOC状态以及工作模式调整模组工作电流,使能量能够在系统中自动调整,且储能模组间不需要任何通信连线,进而提高系统模块化程度。
假定放电时系统电流方向为正,稳态条件下,储能系统的等效方程为
 (5)
(5)
放电模式下电流大小与子模组占空比成正比关系,而充电模式下成反比关系。当通过控制子模组占空比来实现对不同模式下子模组平均电流的调整时,充电时最终输出占空比需要进行反逻辑设计。
2 模块化储能系统分布式均衡控制策略
2.1 分布式均衡策略
本文所提出的分布式均衡控制策略需要对MMDDC中的子模组分别建立电压、电流闭环,控制框图如图4所示。该策略由母线电压外环以及电流内环两部分组成。图4中,Gdcpi、Gipi分别为电压、电流调节器环节。外环的主要作用是稳定直流母线电压,同时产生内环电流参考值。本文对电流内环给定进行了重新设计,使串联的各子模组能够根据当前自身SOC值,自动调整子模组平均电流,从而在满足系统稳压的情况下,实现子模组间能量自动均衡。
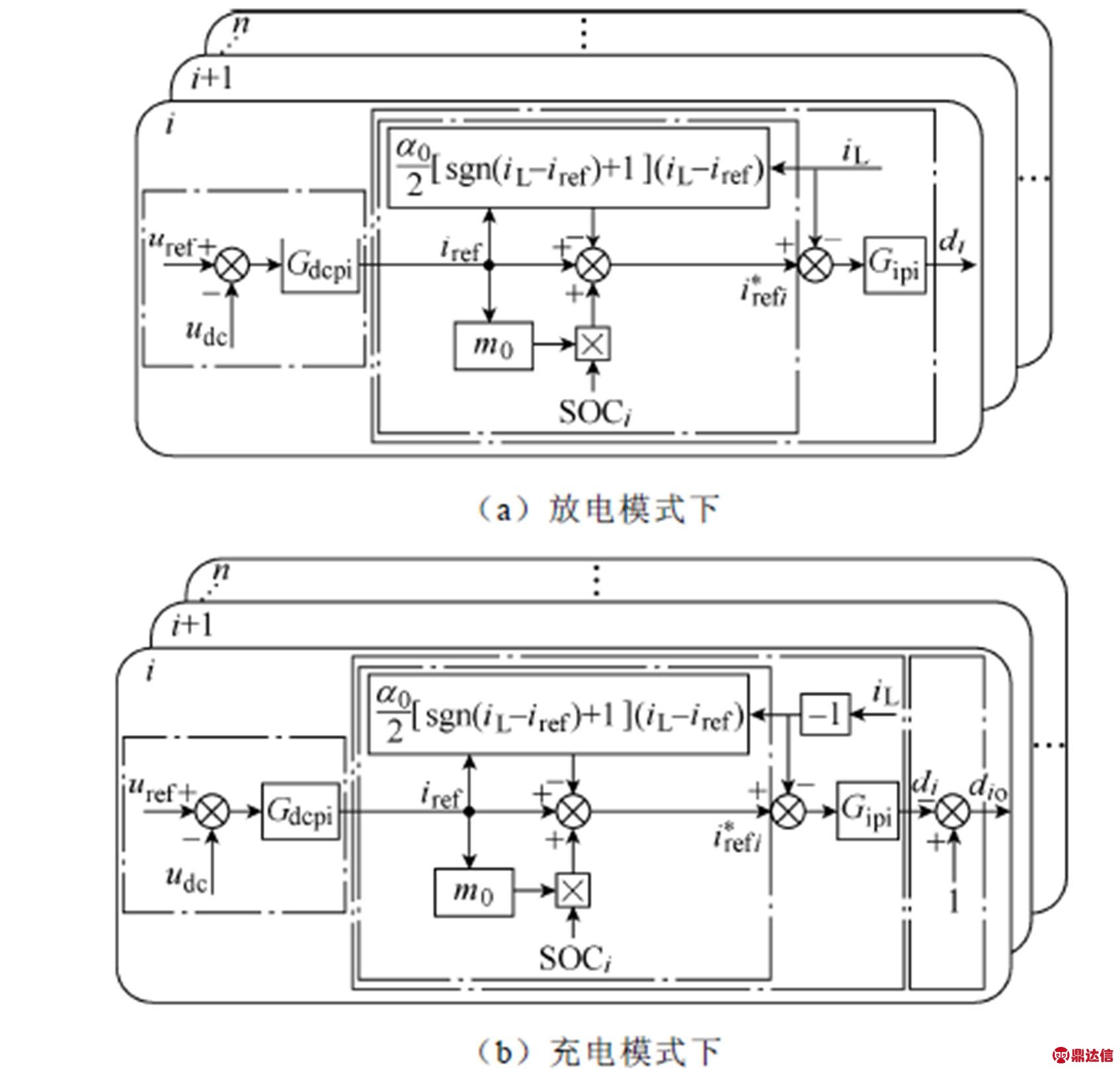
图4 分布式能量均衡控制框图
Fig.4 Distributed energy balancing control block diagrams
重新设计后的电流给定为
 (6)
(6)
其中,令


式中,iref为电压外环输出参考值; 为第i个子模组调整后的电流参考值;m0为均衡系数;a0为电流反馈系数;sgn()为符号函数。
为第i个子模组调整后的电流参考值;m0为均衡系数;a0为电流反馈系数;sgn()为符号函数。
改进后的电流给定可以分为两部分:式(6)中A为根据SOC分布情况的电流给定调整部分;B为系统电流校正部分。系统工作时各子模组iref相同,经过式(6)后,高SOC模组的电流给定将大于低SOC模组,因此高SOC模组的电流调节器将输出较大的占空比。所以,系统放电时高SOC模组的平均电流较大,由于对充电模式最终输出占空比进行了取反设计,如图4b所示,充电时高SOC模组的最终输出占空比较低SOC模组的要小,因此其平均电流较小。随着充/放电不断进行,各子模组SOC将逐渐趋于一致,使得能量在系统中实现均衡分配。
假定系统能量已均衡分布,在引入电流校正环节之前,稳态条件下=iL,即
 (7)
(7)
式中,IL、Iref分别为稳态下系统电流以及电压闭环输出电流。
由式(7)可知系统实际输出电流将大于电压环给定值,电流偏差系数可表示为
 (8)
(8)
引入电流校正环节后,假定系统能量已均衡分布且系统工作电流大于给定值,在稳态条件下可得
 (9)
(9)
式(9)整理后可得
 (10)
(10)
此时系统电流偏差系数调整为
 (11)
(11)
对比式(8)与式(11)可以看出,在引入电流校正环节后,系统电流偏差系数可显著减小,从而使系统在实现能量均衡的同时,减小对系统电流的影响。
2.2 分布式均衡策略参数设计分析
以两模组为例,当系统能量分布不均衡时,由式(6)可得模组间电流给定的偏差为
 (12)
(12)
式中,模组间电流差异由超级电容SOC以及均衡系数共同决定。不同均衡系数下,模组间电流给定偏差如图5所示。

图5 不同均衡系数对电流分配的影响
Fig.5 Influence of different balancing coefficients on current distribution
由图5中可知,均衡系数m0越大,模组间电流给定差值越大,则越有利于模组间能量的均衡,但是这将导致系统输出电流具有较大偏差;反之,均衡系数越小,虽不利于能量快速均衡,但是系统输出电流偏差较小。
当系统允许最大的电流偏差值为DImax时,需要保证稳态下电流偏差在DImax之内。除此之外,任何情况下各模组改进后的电流给定值需为正。由此,根据式(6)、式(10)可得m0与 在设计时需满足
在设计时需满足
 (13)
(13)
式中,SOCi需要根据系统允许偏差极限进行选取。
3 分布式均衡策略稳定性分析
为了讨论分布式均衡策略的稳定性,本文以两子模组为例进行建模分析,超级电容功率为
 (14)
(14)
由于超级电容容量较大,可短时间内认为超级电容电压维持不变,可得超级电容功率扰动方程为
 (15)
(15)
式中,Usci为超级电容稳态值。同时,由式(5)可得直流母线的扰动方程为
 (16)
(16)
式(6)中iref由母线电压闭环输出,可表示为
 (17)
(17)
式中,Gdcpi为母线电压闭环PI调节器,即
 (18)
(18)
式中,kp、ki分别为比例系数和积分系数。
由式(16)和式(17)可得母线电压闭环的扰动方程为
 (19)
(19)
将式(15)代入到式(4)中,可得超级电容SOC在频域下的扰动方程为
 (20)
(20)
同时,将扰动分量代入到式(6)中,整理后可得
 (21)
(21)
将式(19)、式(20)代入式(21)中可得
 (22)
(22)
式(22)经过整理后可得
 (23)
(23)
(24)
因拓扑结构属于级联形式,则各子模组输入/输出功率与储能系统的总功率间的关系为
(25)
式中,Pess为储能系统总功率。
稳态下储能系统的总功率可等效表示为
(26)
分别将式(25)、及(26)改写成扰动方程并进行整合,可得
 (27)
(27)
式中,Udc为直流母线电压稳态值。
将式(23)、式(27)进行整合,得到分布式能量均衡控制策略下模块化多电平储能系统电流传递函数的特征方程为
 (28)
(28)
其中



由式(28)可利用根轨迹对系统稳定性进行分析。绘制根轨迹所用系统参数见表1。
表1 系统参数
Tab.1 System parameters
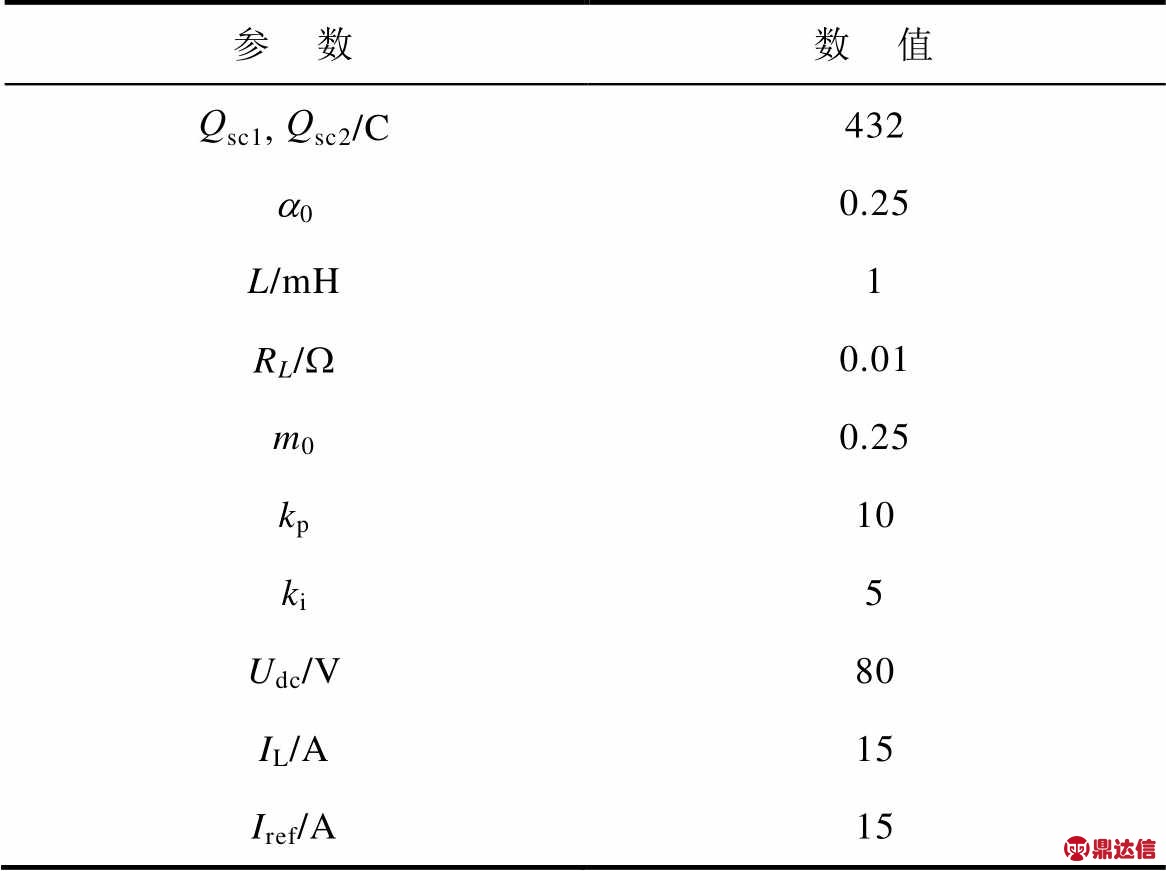
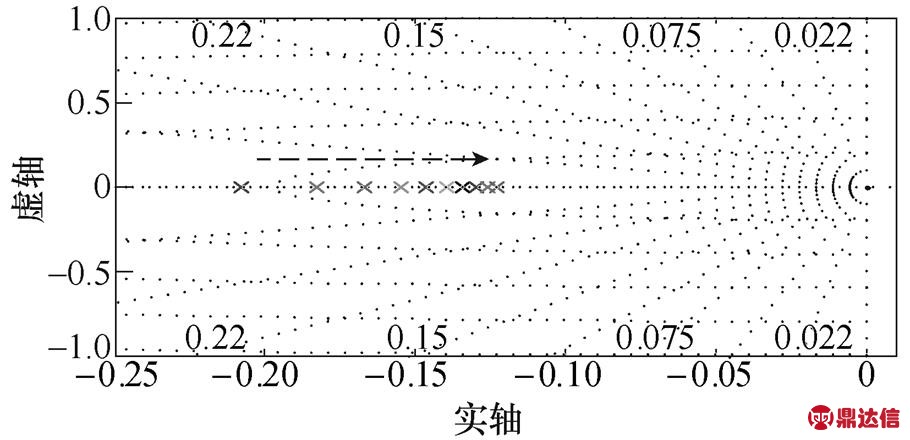
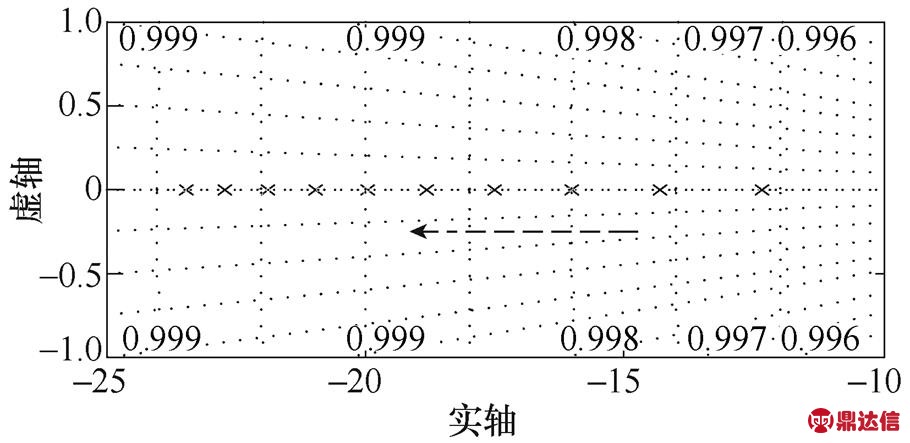
当模组SOC变化时,系统极点的分布如图6所示,图6中箭头表示为随SOC逐渐增加的根轨迹变化趋势方向,SOC的变化区间为0.5~1。图6系统全部极点均位于左半平面,这表明分布式SOC均衡控制策略在系统储能设备允许的运行范围内是稳定的。同时根轨迹随着模组SOC的增加逐渐向虚轴靠近,表明相较于低SOC的工况,高SOC工况下的系统受扰动后恢复时间延长。
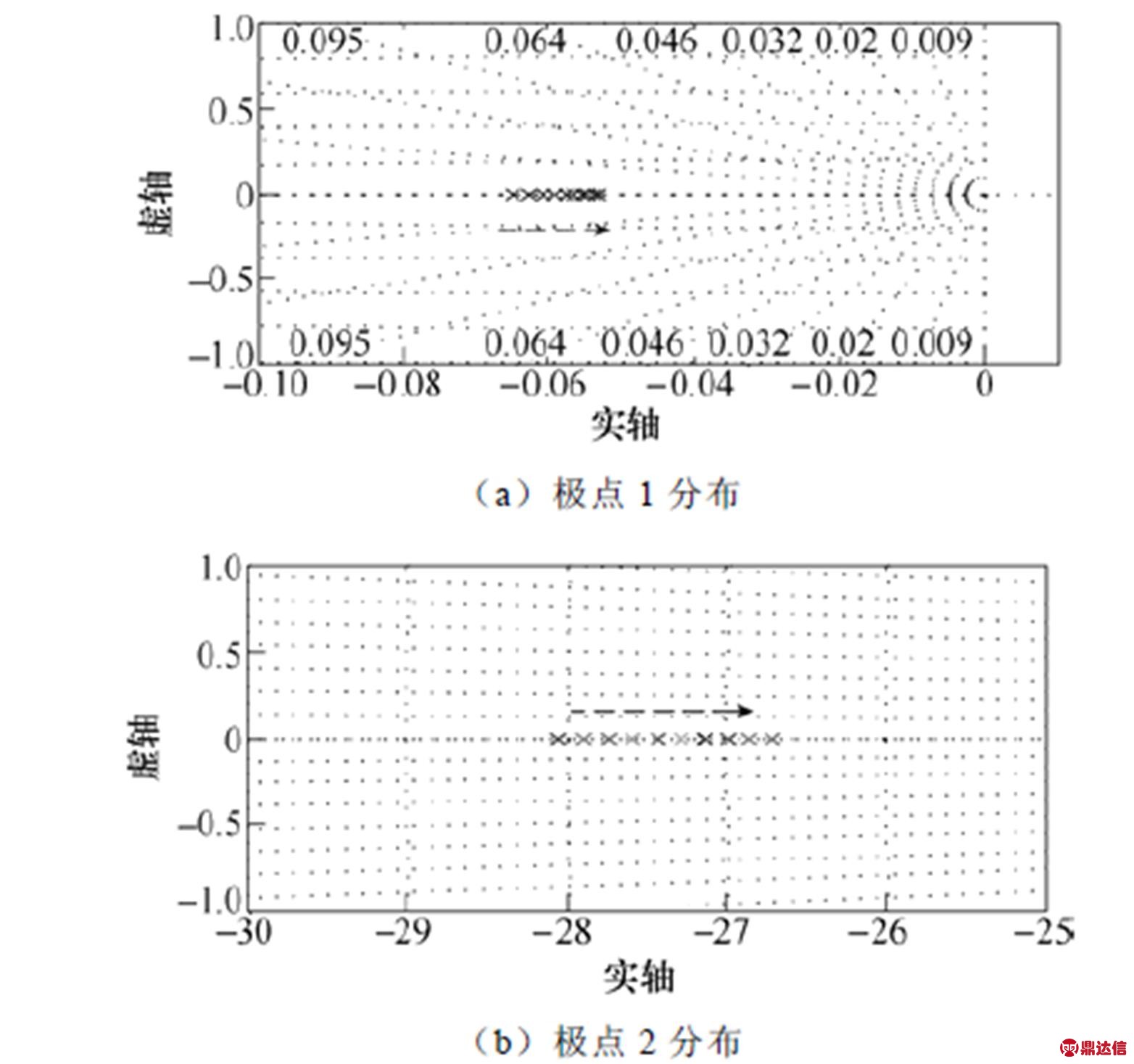
图6 SOC变化时系统极点分布
Fig.6 The distribution of system poles when SOC changes
当均衡系数m0以及电流反馈系数a0变化时,系统极点分布如图7所示,图7中SOC分别取0.7和0.8,m0、a0分别在0~0.5区间变化,图中箭头表示为随着m0、a0增加时根轨迹的变化方向。图7中系统全部极点均位于左半平面,因此系统在均衡参数变化时始终稳定。
(a)极点1分布
(b)极点2分布
图7 m0与a0变化时系统主导极点分布
Fig.7 The system poles distribution when m0 and a0 change
4 实验验证
为了验证分布式能量均衡控制策略的有效性,搭建了有三个子模组的模块化超级电容储能系统实验平台,如图8所示。控制器由德州仪器公司的TMS320F28335 (DSP)与赛灵思XA3S500E 共同构成。其中DSP负责采样以及数据运算,FPGA负责生成驱动信号以及完成系统电流保护。本文将控制器资源分成三份,从而使各子模组在控制上保持相互独立。开关管选用英飞凌公司的IRFP90N20D,开关频率为4kHz。超级电容采用Maxwell公司的9.6F模组。实验所用直流母线需能够提供充/放电的工作环境,为了简化系统设计,本文以3.2F的超级电容模组模拟直流母线。

图8 模块化多电平储能系统实验平台
Fig.8 Energy storage system experiment platform
放电模式下的实验波形如图9所示。母线初始电压为70V,3组超级电容的SOC初始值分别为0.49、0.36和0.25。图9a为母线电压以及系统电流的响应曲线,系统以约为15A大小的电流向母线侧传递能量,使母线电压最终稳定在80V,放电过程持续时间约为4s。超级电容SOC的变化曲线如图9b所示。随着放电的不断进行,三组超级电容SOC逐渐减小,同时在分布式均衡策略的控制下,模组间SOC差异也在不断减小。图9c为模组间SOC差异变化曲线,其中DSOC1与DSOC2分别为模组1与模组2以及模组2与模组3之间的SOC差值。放电结束时,DSOC1与DSOC2分别稳定在了0.089 5及0.078 3左右,组间均衡程度与初始时相比分别均衡了31.18%及28.8%。
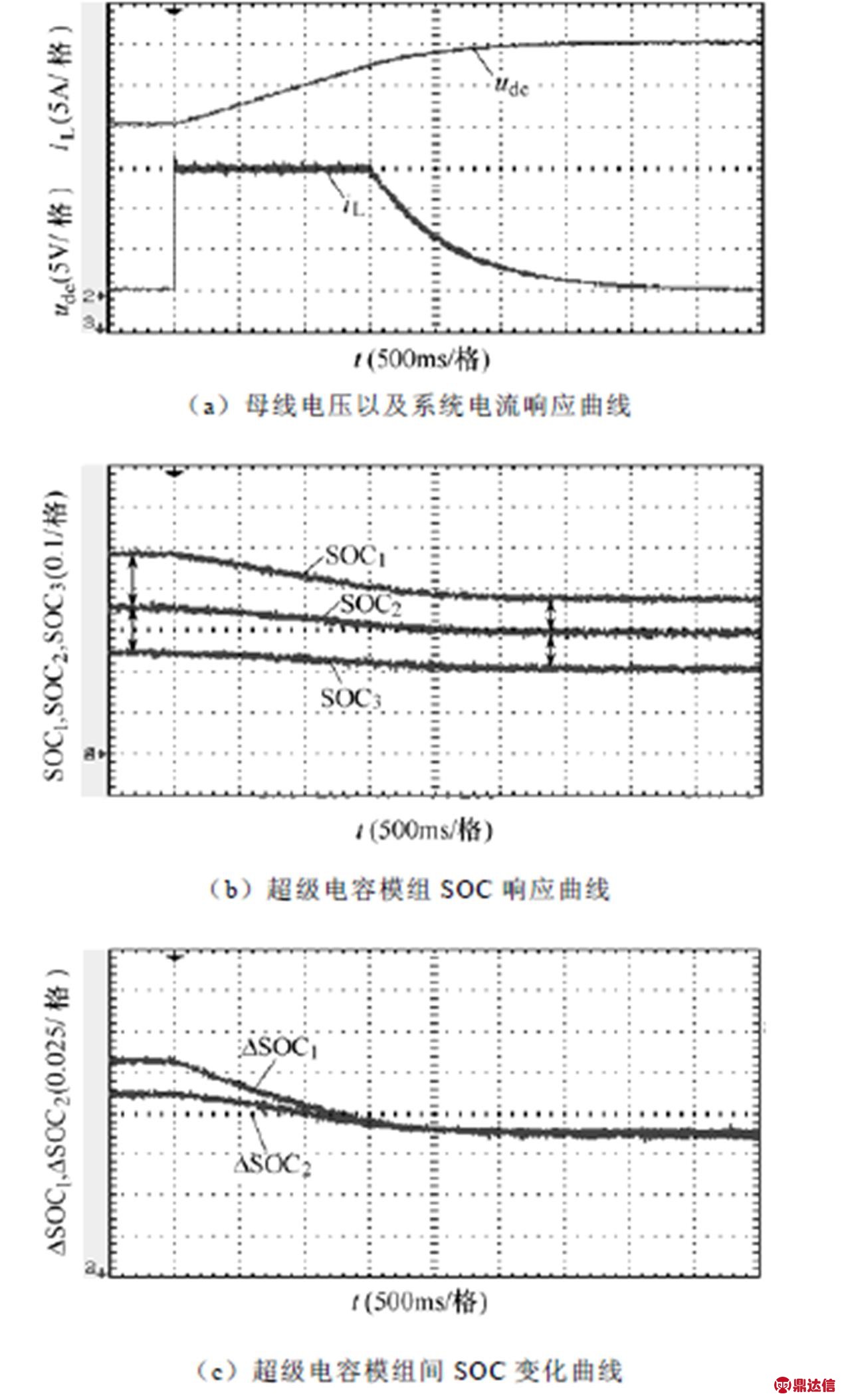
图9 放电模式下的实验波形
Fig.9 Experiment waveforms in discharge mode
图10为自均衡策略引入校正环节与未引入校正环节时电流波形的对比,图中iL0为未引入校正环节时的电流波形,Dt1为电流响应时间差。由图10可以看出,当不增加校正环节时,系统的实际工作电流偏大,但是由于SOC值较低,同时处于放电模式,因此电流偏差量较小。
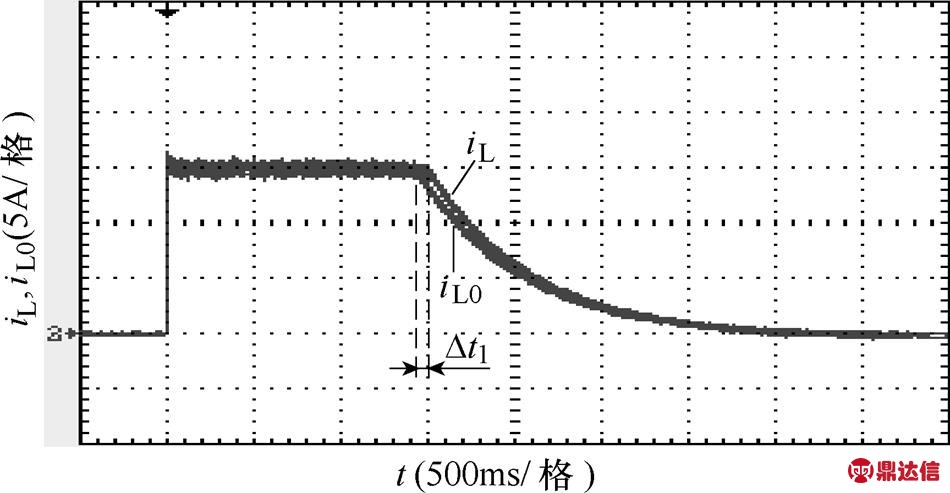
图10 放电模式下电流波形对比
Fig.10 Comparison of current waveforms in discharge mode
图11所示为不同工况下的系统电流以及子模组输出电压波形,图11中Ts为开关周期。图11a为放电模式及组间SOC完全均衡时的实验结果,在组间SOC一致的情况下,由子模组的输出电压可知,各子模组以相同的占空比工作,此时系统电流在单周期内规律脉动,纹波较小。图11b为放电模式下的波形,初始时SOC1>SOC2>SOC3。在分布式均衡控制策略下,子模组1以最大占空比工作,而子模组3工作在最小占空比0.5[16],子模组2的占空比在二者之间。由于各子模组的占空比不同,导致单周期内系统电流呈不规律形式脉动,同时较均衡情况下系统纹波有所增加。图11中的实验结果与2.1节中的理论分析一致,通过根据超级电容模组自身的SOC以及工作模式,使各子模组的占空比具有一定的差异,从而在动态充/放电过程中实现SOC均衡控制,同时子模组的开关频率没有发生变化。
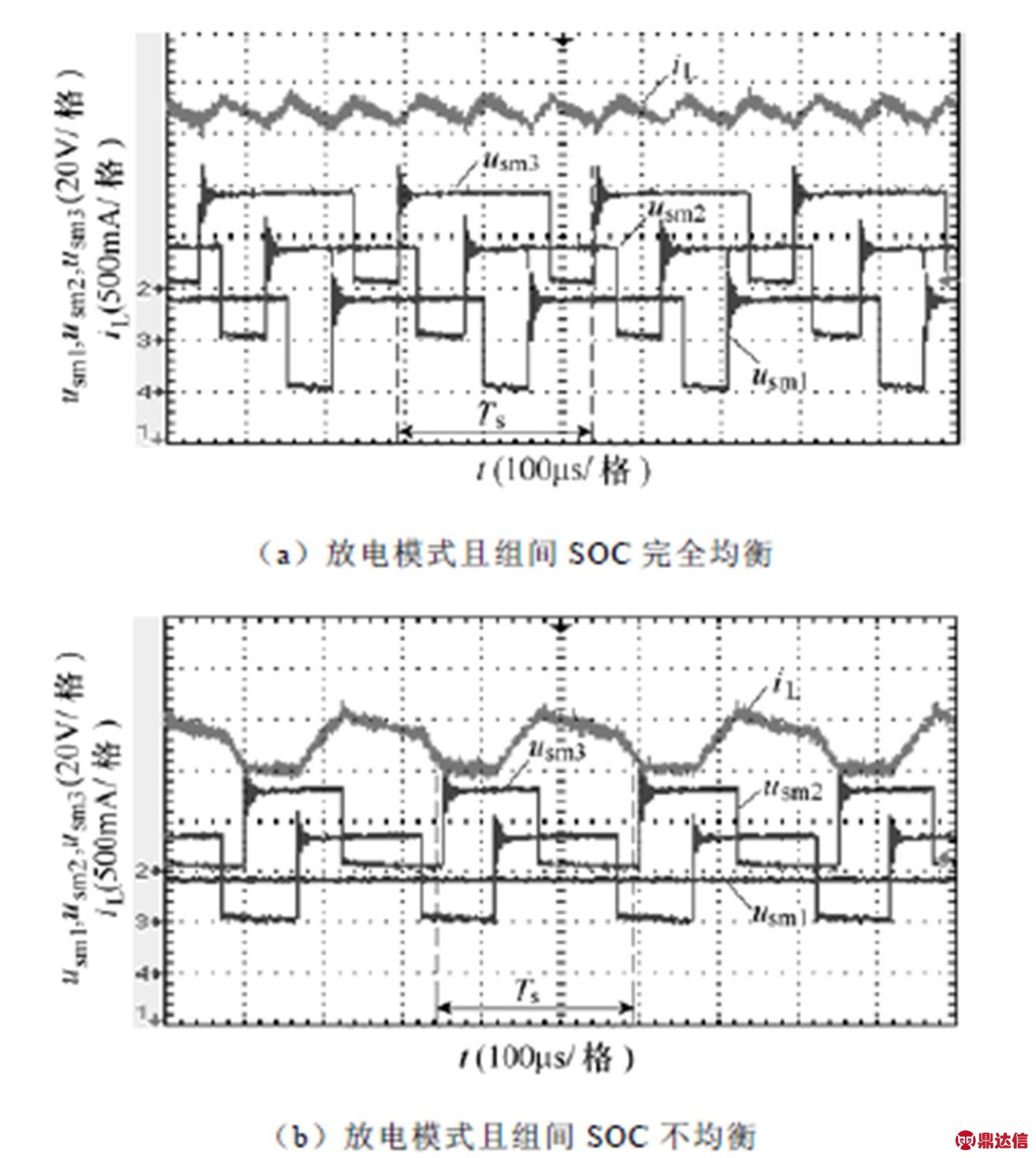
图11 放电模式下系统电流以及驱动信号波形对比
Fig.11 Waveforms comparison of system current and sub-module output voltage in discharge mode
充电模式下的实验波形如图12所示。母线电压初始值为98V,三组超级电容初始SOC值分别为0.64、0.49及0.36。同样设定以15A大小电流进行充电稳压,母线电压最终稳定在80V。母线电压以及系统电流的响应曲线如图12a所示,充电稳压过程持续时间大约为5s。充电时三组超级电容SOC的变化曲线如图12b所示。随着充电的不断进行,图12b中超级电容SOC逐渐增加,模组间SOC的差值不断减小。组间SOC差异变化曲线如图12c所示,其中DSOC1与DSOC2分别为模组1与模组2以及模组2与模组3之间的SOC差值。系统充电结束时,DSOC1与DSOC2分别稳定在了0.118 1及0.097左右,组间均衡程度较初始时分别均衡了21.27%及25.38%。图12d中iL0同样为未增加校正环节时的系统电流。由于充电时超级电容SOC较高,因此iL0出现了较大偏差,导致充电稳压的响应时间明显缩短,电流响应时间差值Dt2较大。

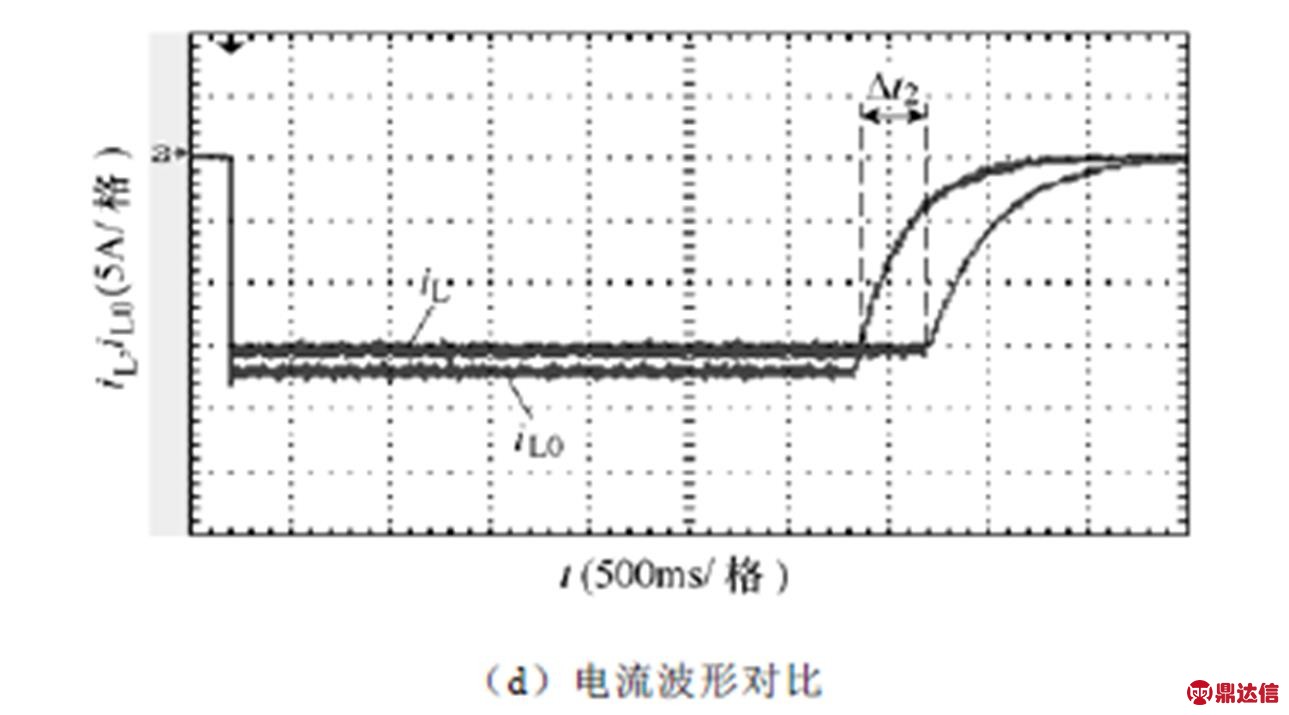
图12 充电模式下的实验波形
Fig.12 Experimental waveforms in charge mode
超级电容属于高功率密度、低能量密度的储能设备,因此它不能像蓄电池那样进行长时间的充/放电工作[12]。上述实验主要通过模拟储能系统对直流母线充/放电的过程来验证文中所提出的控制策略,系统的动态持续时间较短,因此实验结果中组间SOC未达到完全均衡。但是,由2.1节的原理分析可知,只要各模组的SOC没有达到一致,子模组的占空比间必然存在差异,因此动态均衡过程将在系统充/放电时一直存在。为了对此进行证明,进行了基于单模组不均衡的实验,单模组小SOC差值均衡实验结果如图13所示。
图13a和图13b为充电模式下的超级电容模组SOC及组间SOC响应曲线。系统初始值SOC分别为0.59、0.49及0.49,系统中仅模组1不均衡,且不均衡程度小于图12中的实验初始条件。充电结束后组间SOC差异曲线如图13b所示,其中,DSOC1最终稳定在了0.06,组间SOC较初始时刻均衡了40%。DSOC2在充电的过程中始终保持为零,这表明已到达组间均衡的模组工作保持同步。图13c与图13d为放电模式时的单组SOC不均衡实验结果。初始模组的SOC分别为0.41,0.36及0.36,且其不均衡程度小于图11中的实验初始条件。放电结束后DSOC1最终下降到0.032,组间SOC较初始时刻均衡了36%。由于模组2与模组3的初始SOC相同,则图13d中DSOC2在放电过程中始终保持为零。由图13的实验结果可知,模组的SOC均衡过程与组间差异大小以及系统运行模式无关,只要模组SOC间存在差异,均衡将在系统动态运行过程中一直持续进行,直至模组SOC完全达到一致。
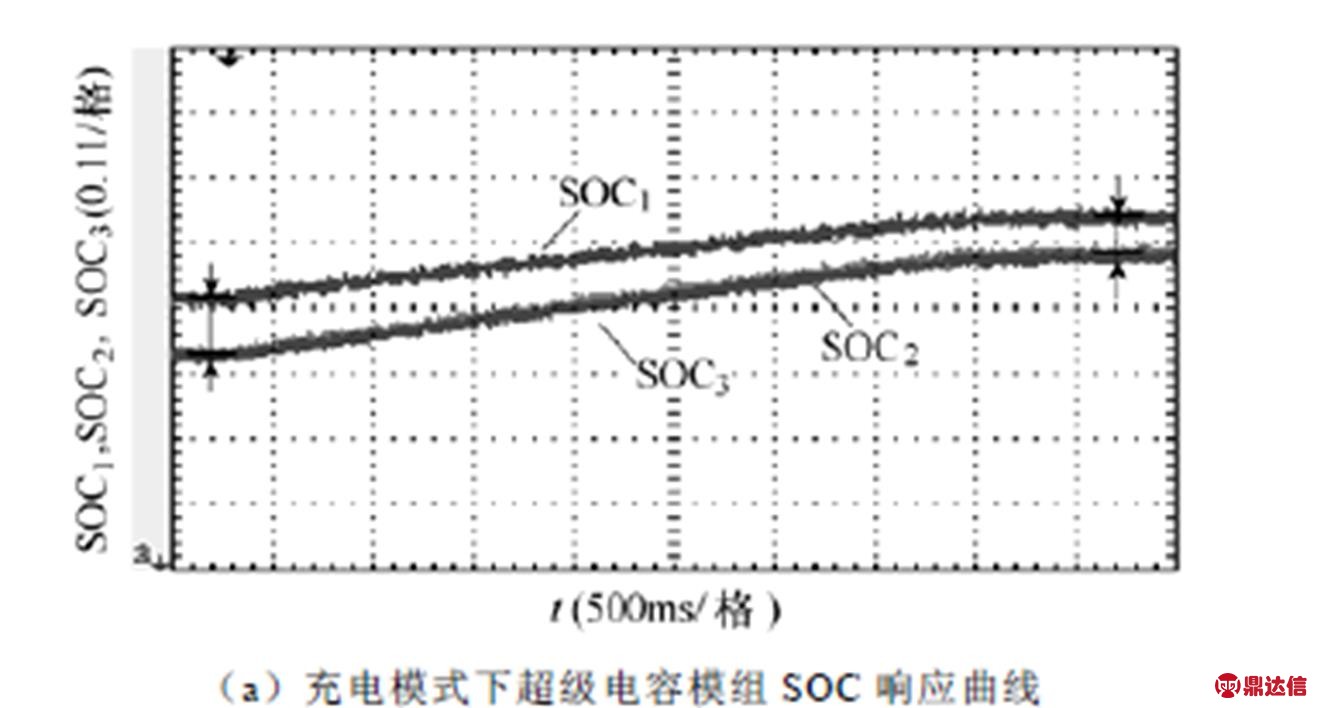
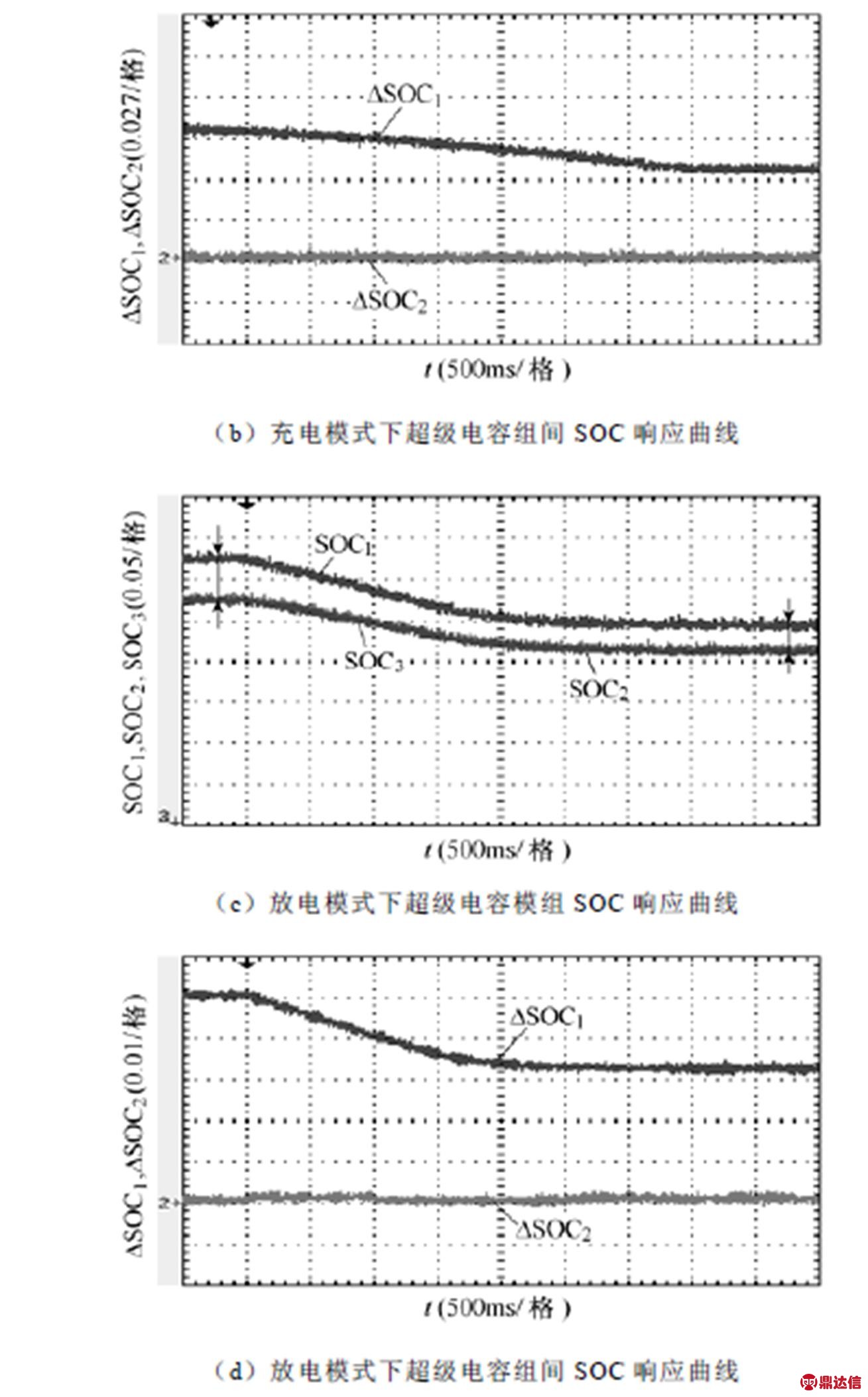
图13 单模组小SOC差值均衡实验结果
Fig.13 The balancing experimental results of single module small SOC difference
从上述充/放电的实验结果可知,分布式均衡控制策略在系统进行能量双向传递时,能够根据自身SOC状态动态调整能量在各模组间的分布,实现子模组间能量的独立自主均衡,且均衡速度较快。策略中增加的电流校正环节能够对系统电流进行动态调节,有效改善了系统电流的输出特性。该策略可以实现模块化储能系统分布式控制的要求,各子模组可进行完全独立控制,控制器之间无任何联系,且系统具有良好的稳定性。
5 结论
本文提出了一种适用于模块化储能系统的分布式能量均衡控制策略。该策略将下垂控制思想与超级电容SOC相结合,对电流环进行了重新设计,使系统各子模组能够根据自身的能量分布情况调整其平均工作电流值,达到能量自动均衡的目的。通过引入电流校正环节,减小了输出电流偏差对系统的影响,改善了系统电流调整率。同时,文中利用系统闭环根轨迹证明了该策略的稳定性。分布式能量均衡控制策略可以保证各模组控制上完全独立,使系统整体设计具有很高的冗余特性,可完全依据模块化设计思路进行设计。最后,通过搭建的模块化储能系统实验平台对该策略进行了实验验证。


