
摘 要:升压型直流变换器采用滑模变结构控制策略存在收敛速度较慢、抖振剧烈等导致的动态响应品质差问题。本文提出一种双幂次滑模趋近滞环控制策略,在电流跟踪误差估计值的基础上定义滑模面以实现电流跟踪控制,依据系统的未知扰动和负载变化建立自适应状态观测器,结合李雅普诺夫函数设计自适应律,并计算自适应占空比。提出一种双幂次趋近律,根据系统不同趋近过程的特点制定参数选择标准,对系统的动态响应品质进行目的性调节,并设计滑模滞环控制器以削弱由符号函数项所引起的抖振。对以上方法进行了仿真验证,结果显示可有效改善系统的动态特性和电流控制鲁棒性。
关键词:升压型直流变换器;双幂次趋近律;滑模控制;自适应观测器;滞环控制器
复合储能系统综合电池和超级电容的高比能、高比功率特性,可有效提升系统中电池的使用寿命,获得了广泛的关注[1]。升压型直流变换器广泛应用于要求输出电压高于输入电压的工程中,在复合储能系统中也得到了大量的应用。然而,开关特性使升压型直流变换器具有非线性,实际工作中输入电压、负载和系统参数变化等不确定性扰动随时可能发生,对系统稳定性造成威胁。因此,寻找一种针对该非线性系统在任意工况下抗扰动且快速收敛的控制策略尤为重要[2]。
滑模控制具有鲁棒性强、快速响应、对参数变化及扰动不灵敏等特点,已被广泛应用于直流变换器稳定性控制和工作模式切换等实际工程问题 中[2-4]。其主要缺点在于系统的不连续开关特性引起不可避免的抖振现象,抖振不仅影响控制精确性,增加能量消耗,而且易激发系统的未建模特性,使其产生振荡或失稳,损坏控制器部件。此外,滑模控制仅在滑模运动阶段对系统的不确定性和扰动具有不变性,因此,如何在减少滑模趋近时间的同时消除滑模运动阶段的抖振仍是目前研究的热点问题之一[5-6]。
国内外学者采用边界层法[7]、滤波法[8]以及趋近律法[9-10]等来削弱抖振。边界层法不能使状态收敛到滑模;滤波法存在稳定性分析的难点;基于趋近律的滑模控制可以有效改善趋近运动的动态品质,自提出以来便受到广泛关注[7-12]。常用的3种趋近律中,等速趋近律的趋近速度恒定,指数趋近律虽然加快了系统远离滑模面时的趋近速度,但这两种趋近律都不能从理论上消除抖振,单幂次趋近律可以平滑地进入滑动模态而削弱抖振,但在远离滑模面时存在趋近速度过小的问题[11]。上述常用趋近律的可调参数较少,在控制过程中仍然存在抖振及收敛速度有待提升的问题[12-13]。
外界干扰及不确定项是滑模控制中抖振的又一主要来源,对直流变换器而言,输入电压变化、负载变化以及系统参数变化等不确定因素均会对系统造成干扰,影响控制效果[14]。文献[15]设计了一种自适应滑模观测器对外界干扰和不确定性进行估计并加以补偿调整,达到削弱抖振的目的。直接对控制量进行滞环控制可以降低系统模式切换频率而减小抖振[3],但抖振削弱效果仍有待提升。
综上,本文提出一种升压型直流变换器的双幂次滑模趋近滞环控制策略。考虑电池内阻变化所引起的输入电压不稳定,以及负载变化所引起的系统扰动,建立自适应观测器,结合李雅普诺夫函数设计自适应律。提出一种双幂次趋近律,根据系统不同趋近过程的特点制定参数选择标准,从而对系统的动态响应品质进行目的性调节。设计滑模滞环控制器以削弱由符号函数项所引起的抖振。与指数趋近律相比,验证了双幂次滑模趋近滞环控制策略在系统启动阶段和负载突变情况下,在调节时间、抗干扰和电流鲁棒性控制等方面的优越性。
1 升压型直流变换器模型
升压型直流变换器的等效电路如图1所示。其理想状态模型见式(1)~(2)[16]
 (1)
(1) (2)
(2)
式中, 为电感电流;
为电感电流; 为输出电压;
为输出电压; 为电池开环电压;
为电池开环电压; 为占空比;L、R、C分别是滤波电感、滤波电容和负载电阻值。
为占空比;L、R、C分别是滤波电感、滤波电容和负载电阻值。
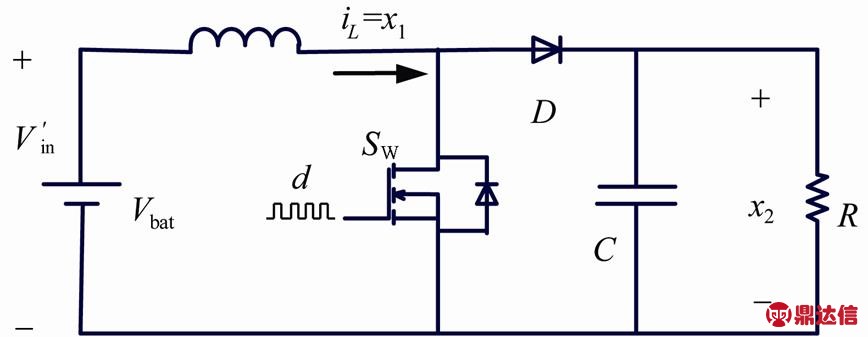
图1 升压型直流变换器等效电路
Fig.1 Equivalent circuit of boost DC converter
电池内阻变化导致其开环电压不稳定,因此定义 代表升压型变换器的输入电压,式(1)可写成式(3)。
代表升压型变换器的输入电压,式(1)可写成式(3)。
 (3)
(3)升压型直流变换器用于电动汽车复合电源系统中时,需要考虑电池内阻变化、负载变化和系统参数变化所引起的电流波动和输出电压波动,下文提出一种滑模控制,在跟踪电流误差的基础上,克服上述不确定性因素对系统造成的干扰,实现电流控制的鲁棒性以保证复合电源系统中电池组的安全和使用寿命。
2 滑模控制与滑模观测器
2.1 电流滑模控制
为了保证电流控制的鲁棒性和电池组安全,定义跟踪电流误差为 ,其中
,其中 为电感电流
为电感电流 的估计值。设计滑模面
的估计值。设计滑模面 为
为
 (4)
(4)滑模控制应该满足到达性条件 (
( ),此处
),此处 ,由于
,由于 ,结合(3)式可得
,结合(3)式可得
(5)
设滑模趋近律为 ,且保证始终满足到达性条件,则有:
,且保证始终满足到达性条件,则有:
 (6)
(6)可求得控制量,即占空比为:
 (7)
(7)
由式(7)可以看出,控制量d包含动态不确定项、 和
和 ,定义
,定义 ,其中
,其中 为设定的参考电压值,
为设定的参考电压值, 为负载电阻R的估计值,则负载电阻R的等效电导估计值为
为负载电阻R的估计值,则负载电阻R的等效电导估计值为 ,对
,对 求导可得,则控制量d中最终所包含的动态不确定项为输入电压和负载等效电导,对应实际情况中电池内阻变化所引起的输入电压变化,以及负载电阻变化所引起的未知扰动,下面将根据这两项值设计滑模观测器的自适应律。
求导可得,则控制量d中最终所包含的动态不确定项为输入电压和负载等效电导,对应实际情况中电池内阻变化所引起的输入电压变化,以及负载电阻变化所引起的未知扰动,下面将根据这两项值设计滑模观测器的自适应律。
2.2 自适应滑模观测器
定义输出电压误差为 ,其中
,其中 为输出电压的估计值,建立状态观测器如下[15] :
为输出电压的估计值,建立状态观测器如下[15] :
 (8)
(8)  (9)
(9)
定义 ,,结合式(2)~(3)、式(8)~(9)以及文献[15]中的李雅普诺夫函数形式,可得
,,结合式(2)~(3)、式(8)~(9)以及文献[15]中的李雅普诺夫函数形式,可得
 (10)
(10)所设计的自适应律应满足系统稳定性条件 ,可得自适应律如下
,可得自适应律如下
 (11)
(11)
 (12)
(12)根据上述自适应律,有 ,满足系统稳定性条件。根据拉塞尔不变性原理,有,
,满足系统稳定性条件。根据拉塞尔不变性原理,有,  ,结合式(2)~(3)和式(8)~(9),可得收敛于
,结合式(2)~(3)和式(8)~(9),可得收敛于 ,
, 收敛于。由于,若假设系统效率为
收敛于。由于,若假设系统效率为 ,则有
,则有 ,又因为,可得和均收敛于。
,又因为,可得和均收敛于。
与文献[15]的不同之处在于,基于上述自适应观测器的滑模控制可以保证电流控制的鲁棒性。滑模控制因子(自适应占空比)计算为:
(13)
3 双幂次滑模滞环控制策略
3.1 双幂次滑模控制
基于趋近律的滑模变结构控制方法可以改善系统趋近运动的动态响应品质,指数趋近律是最常用的滑模趋近律,其形式为,常数项使得系统在平衡点附近产生幅值大小为 的抖振,且其趋近速度有待提升[17-18]。
的抖振,且其趋近速度有待提升[17-18]。
本文提出一种针对系统不同趋近过程特点进行目的性调节的双幂次滑模趋近律,形式如下
 (14)
(14)由于,故该趋近律存在且始终满足可达性条件,即系统状态s在趋近律式(14)作用下可达到平衡点 。该双幂次趋近律包含两个比例系数和,以及两个幂次项
。该双幂次趋近律包含两个比例系数和,以及两个幂次项 和,可以针对系统不同趋近过程的特点制定参数选择标准,从而对系统动态响应品质进行目的性调节,保证系统状态远离滑模面(s较大)时,以较大速度趋近滑模面,提升动态响应的快速性;当系统状态趋近滑模面(s较小时)时,保证较小的控制增益以降低抖振,提升动态响应的平滑性。将该双幂次趋近律应用于上述滑模控制中,可得自适应占空比为
和,可以针对系统不同趋近过程的特点制定参数选择标准,从而对系统动态响应品质进行目的性调节,保证系统状态远离滑模面(s较大)时,以较大速度趋近滑模面,提升动态响应的快速性;当系统状态趋近滑模面(s较小时)时,保证较小的控制增益以降低抖振,提升动态响应的平滑性。将该双幂次趋近律应用于上述滑模控制中,可得自适应占空比为
(15)
3.2 滑模滞环控制器
滑模控制中的高频切换问题不利于系统稳定性和高效性,滑模滞环控制器是解决该问题的有效方法[2]。滑模滞环控制器可以将系统的切换频率控制在合理的范围内,削弱抖振并减少切换过程中的能量损耗。传统的滑模滞环控制器直接作用于系统控制量,例如直接在相应的滞环区间内选择控制量为1或0,控制占空比输出或不输出,只能通过较窄的滞环区间来任意地接近滑模[2-20]。由于符号函数是引起抖振的主要原因之一,因此本文设计的滑模滞环控制器将滞环缓冲区间直接作用于符号函数项而非控制量。滞环区间设置为[0.04,0.4]和[-0.4,-0.04],具体的实施方式如图2所示。当 时,即系统状态接近滑模面时,不使用符号函数以避免该项所引起的高频切换现象;当时,必须使用符号函数项以提升自适应占空比的调节速度。
时,即系统状态接近滑模面时,不使用符号函数以避免该项所引起的高频切换现象;当时,必须使用符号函数项以提升自适应占空比的调节速度。
(1)当滑模面 时:①若
时:①若 时,如果,则
时,如果,则 ,否则,即保持不变;②若时,如果
,否则,即保持不变;②若时,如果 ,则,否则,即保持不变;
,则,否则,即保持不变;
(2)当滑模面时:①若时,如果,则 ,否则,即保持不变;②若时,如果,则,否则,即保持不变。
,否则,即保持不变;②若时,如果,则,否则,即保持不变。
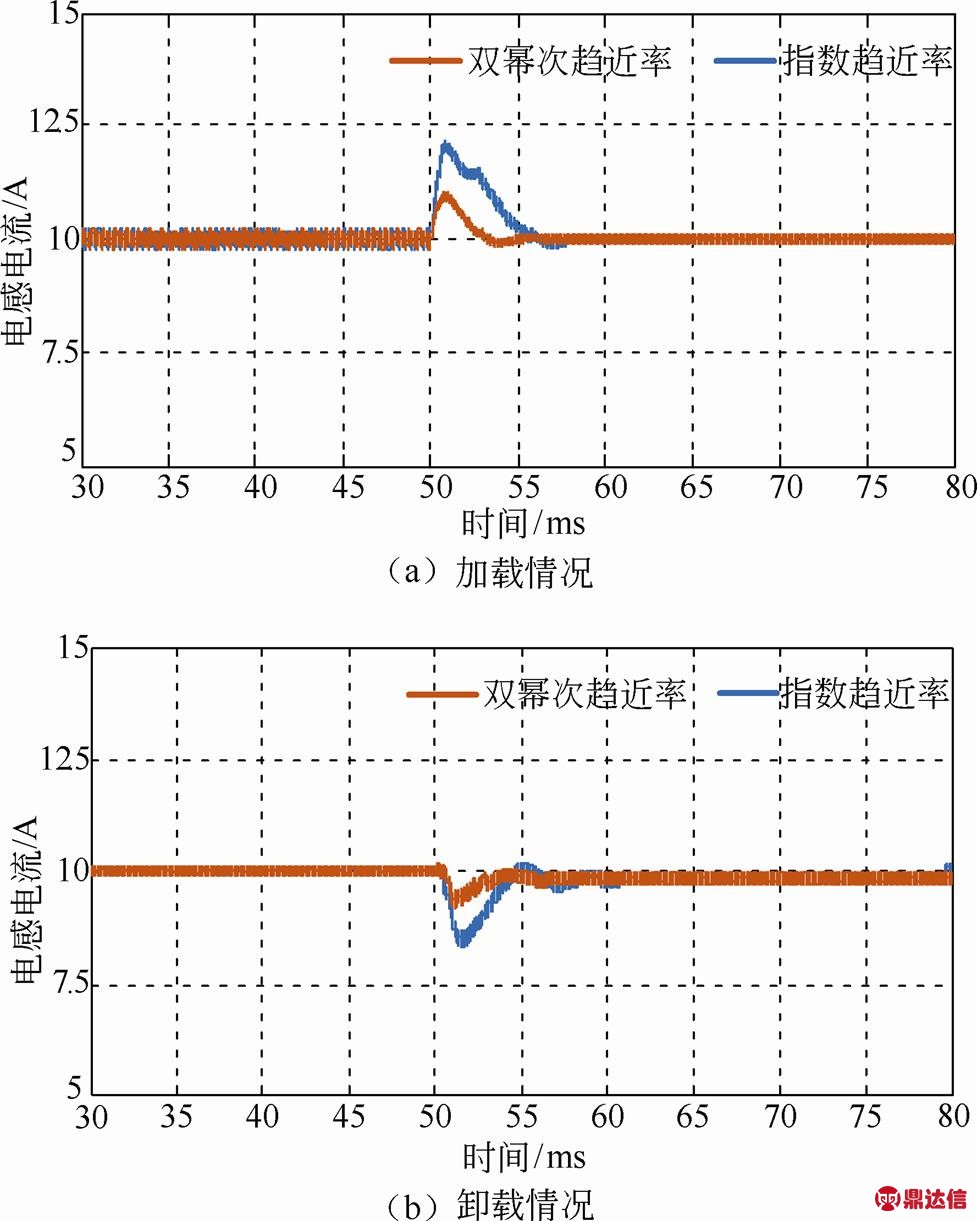
图2 滑模滞环控制器
Fig.2 Sliding mode hysteresis controller
4 仿真研究
双幂次滑模趋近滞环控制策略框图如图3所示,主要包括计算误差估计值和 ,设计参考电压,建立滑模观测器并确定自适应律和,设计双幂次滑模趋近律并进行参数选择,将双幂次滑模趋近律与自适应滑模观测器相结合,并对符号函数项设置滑模滞环控制器,计算得到最终控制量,即自适应占空比。
,设计参考电压,建立滑模观测器并确定自适应律和,设计双幂次滑模趋近律并进行参数选择,将双幂次滑模趋近律与自适应滑模观测器相结合,并对符号函数项设置滑模滞环控制器,计算得到最终控制量,即自适应占空比。
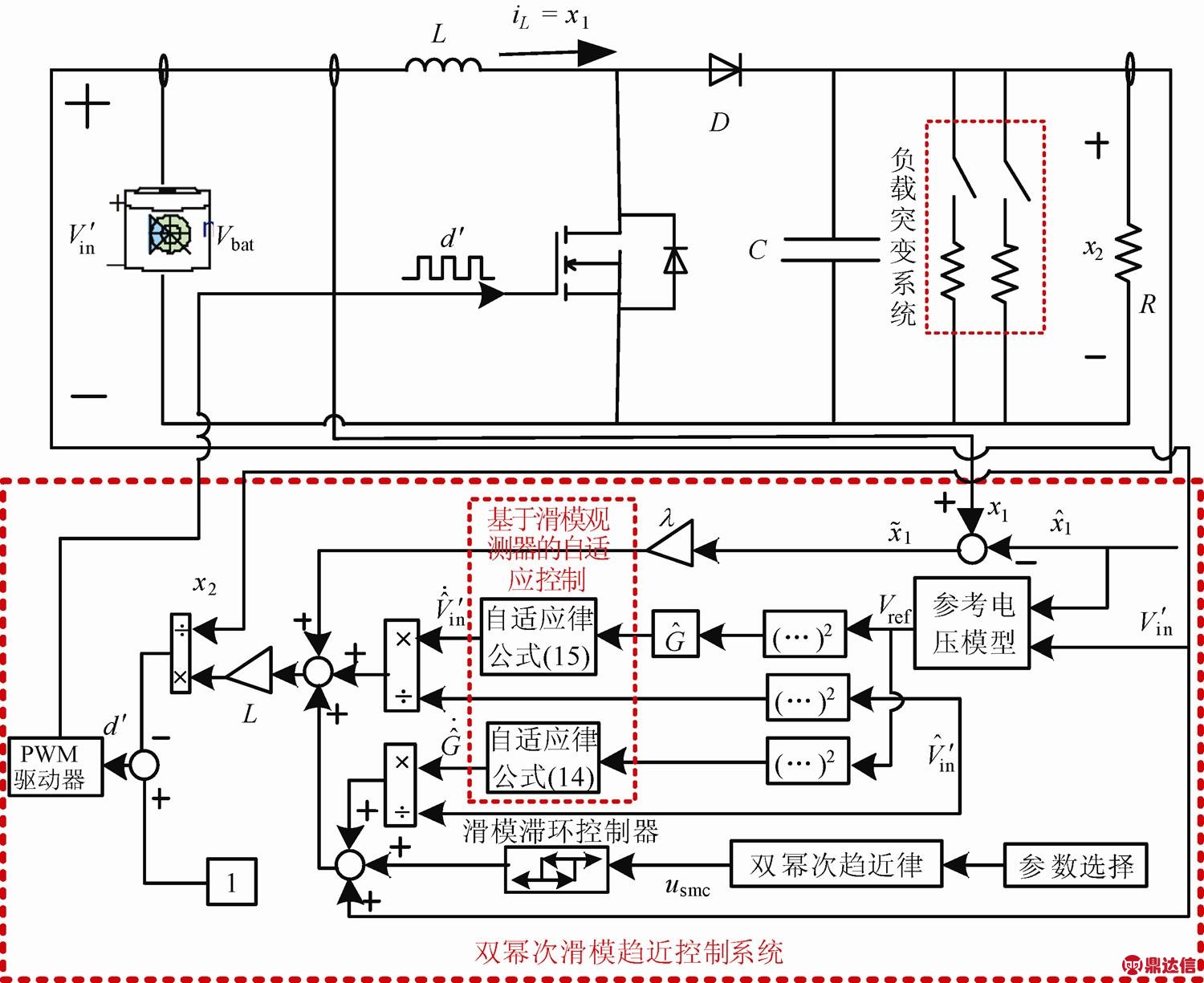
图3 双幂次滑模趋近滞环控制策略框图
Fig.3 Block diagram of double power reaching law-based sliding mode control strategy
4.1 参数分析及选择
双幂次趋近律包含4个可调控制参数、、和,仿真发现控制参数对系统趋近运动的动态响应品质有显著影响[19],为了获得平稳迅速的趋近效果,应该通过仿真探究控制参数的最佳取值。仿真发现取值在[1,100]之间对系统控制效果影响显著,故选取4组代表性值:1、10、50、100,研究对系统启动响应的影响,仿真结果如图4 (a)所示。由于,导致 时对系统影响较小,仿真发现取值在[10,1000]之间对系统控制效果影响显著,故选取4组代表性取值:10、100、500、1000,研究对系统启动响应的影响,仿真结果如图4 (b)所示。分析结果发现:比例系数和对系统的影响效果类似,取值越大,启动电流抖振幅值越小;取值越小,启动电流曲线斜率越大,即响应越快。所选值应既能满足启动电流振荡幅值小,又满足启动响应迅速,故选取折中值:,。
时对系统影响较小,仿真发现取值在[10,1000]之间对系统控制效果影响显著,故选取4组代表性取值:10、100、500、1000,研究对系统启动响应的影响,仿真结果如图4 (b)所示。分析结果发现:比例系数和对系统的影响效果类似,取值越大,启动电流抖振幅值越小;取值越小,启动电流曲线斜率越大,即响应越快。所选值应既能满足启动电流振荡幅值小,又满足启动响应迅速,故选取折中值:,。
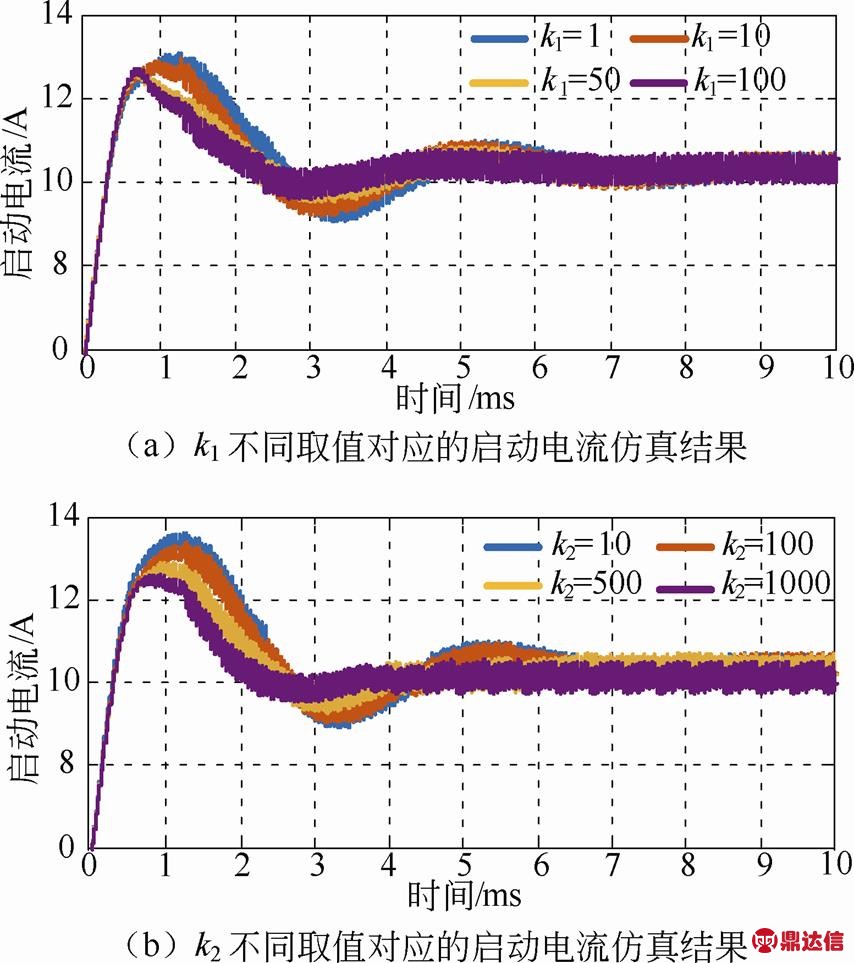
图4 k不同取值对应的启动电流仿真结果
Fig.4 Simulation results of starting current corresponding to different value of k
仿真发现取值在[1,10]之间对系统控制效果影响显著,故选取4组代表性值:1、3、5、8,研究对系统启动响应的影响,仿真结果如图5(a)所示。由于,仿真发现取值在[0.1,1]之间对系统控制效果影响较大,故选取4组代表性值:0.1、0.5、0.8、1,研究对系统启动响应的影响,仿真结果如图5(b)所示。分析结果发现:幂次项和对系统的影响效果类似,取值越大,启动电流抖振幅值越小;取值越小,启动电流曲线斜率越大,即响应越快。
双幂次趋近律的优点在于,可以利用幂次函数的性质对趋近过程不同阶段的动态响应进行针对性调节,本文选取和两个不同阶段,改变幂次项取值对趋近速度和抖振幅值进行调节。当时,即系统状态远离滑动模态时,以系统动态响应的快速性作为参数选择的首要标准,即应该调整幂次项系数以提升系统趋近速度,使得系统的瞬时响应能力最佳,因此选取较小的双幂次参数值:,。当时,即系统状态趋近滑动模态时,以系统动态响应的平滑性作为参数选择的首要标准,即应该调整双幂次参数以削弱抖振现象,降低电流波动幅值,因此选取较大的双幂次参数值:, 。
。
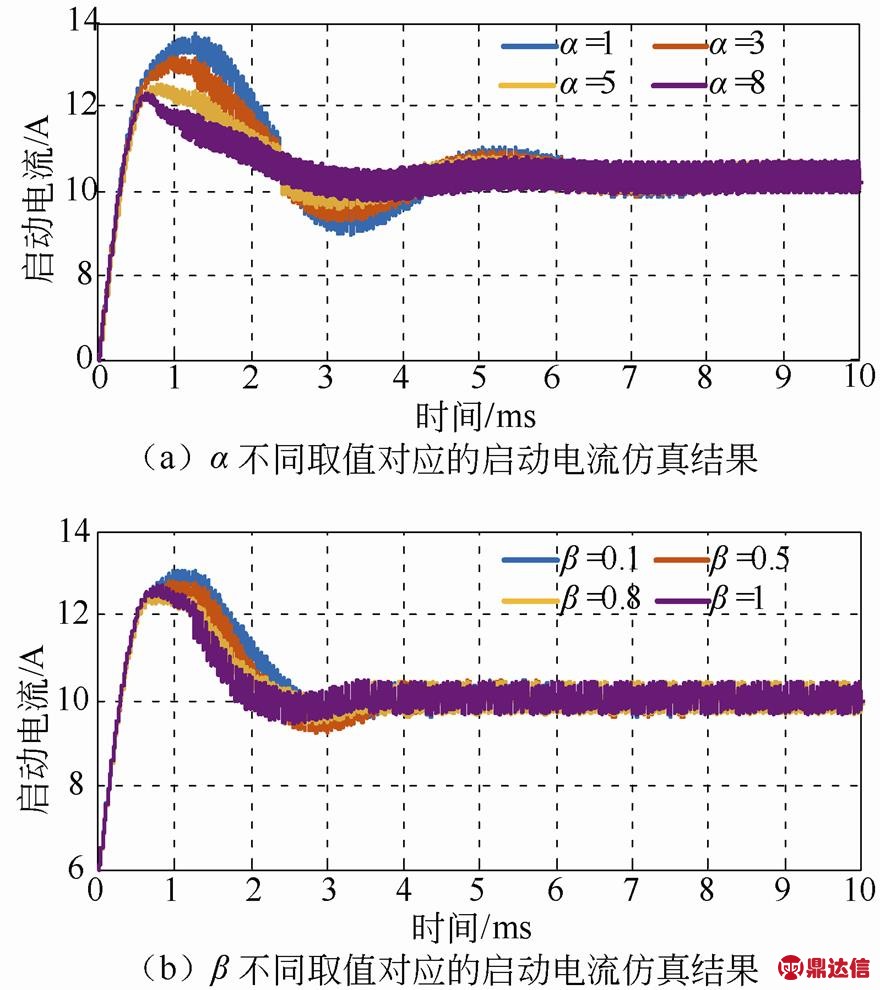
图5 幂指数不同取值对应的启动电流仿真结果
Fig.5 Simulation results of starting current corresponding to different value of power exponent
4.2 仿真验证
为了验证所提出的双幂次滑模趋近滞环控制策略对升压型直流变换器稳定性控制的有效性和优越性,首先测试启动时的响应情况,并与常用的指数趋近律进行对比,启动后要求电流稳定在10A,仿真对比结果见图6,详细仿真数据如表1所示。升压型直流变换器在启动时采用双幂次趋近律控制,其启动电流、输出电压、滑模面以及占空比的启动响应时间分别缩短约58.8%、54.3%、50%和66.7%,即在启动时可以更快进入工作状态并达到稳定无波动,且曲线抖振幅值更小,保证了电流控制的鲁棒性,有利于提升系统稳定性和高效性。
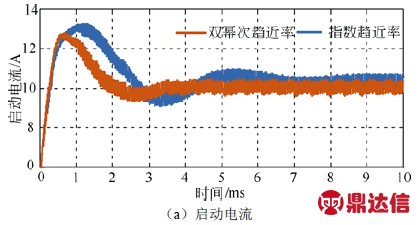
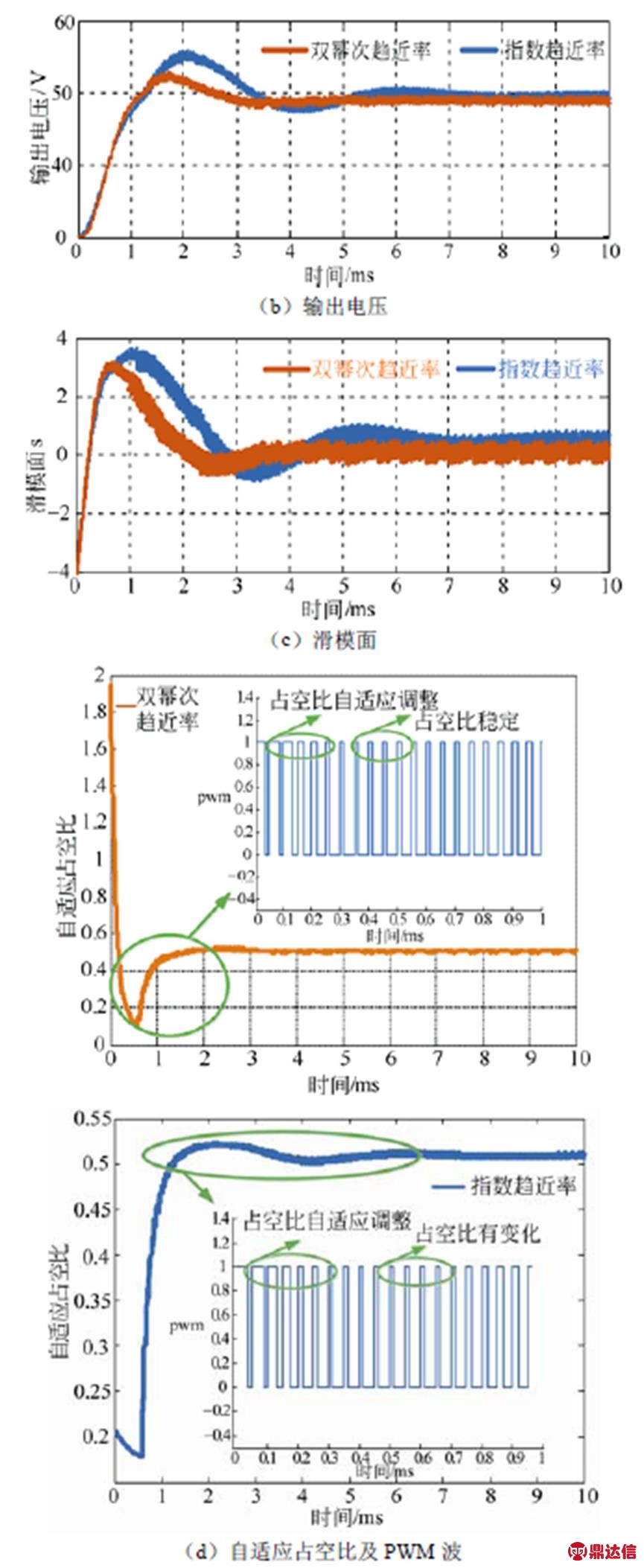
图6 恒定负载(10Ω)启动时两种趋近律对比仿真结果
Fig.6 Simulation results of two kinds of reaching laws with constant load
表1 双幂次趋近律与指数趋近律的启动响应时间
Table 1 Start response time of double power reaching law and the exponential reaching law

为了模拟负载突变,分别对升压型直流变换器输出端进行加载和卸载操作,电流瞬时响应对比结果见图7。图7(a)为加载结果,0.05s时在输出端突然并入10Ω电阻,使得负载电阻由10Ω突变至5Ω,电感电流瞬间增大;图7(b)为卸载操作结果,0.05s时在输出端突然撤掉10Ω电阻,使得负载电阻由5Ω突变至10Ω,电感电流瞬间减小。详细仿真数据分别如表2和表3所示。升压型直流变换器在负载突变时采用双幂次趋近律控制,加载和卸载时瞬时电流响应时间分别缩短约45.7%和61%,且电流跳变峰值更小,稳定后不波动,即双幂次趋近律在升压型直流变换器负载突变情况下的稳定性控制更为有效,且瞬时响应能力更强。
图7 负载突变时两种趋近律对应的瞬时电流仿真结果
Fig.7 Simulation results of instantaneous current for two kinds of reaching laws with load mutation
表2 加载时两种趋近律的电流瞬时响应时间和峰值
Table 2 Instantaneous response time and peak value for two kinds of reaching laws when loading

表3 卸载时两种趋近律的电流瞬时响应时间和峰值
Table 3 Instantaneous response time and peak value for two kinds of reaching laws when unloading

5 结 论
本文提出一种双幂次滑模趋近滞环控制策略,通过考虑未知扰动和负载变化,建立了升压型直流变换器的等效电路和平均状态空间模型,设计了自适应状态观测器。提出了一种双幂次趋近律并进行参数选择,设计了滑模滞环控制器以削弱由符号函数项所引起的抖振。
仿真结果显示采用双幂次趋近律控制,启动时可使电流、输出电压、滑模面以及占空比的响应时间分别缩短约58.8%、54.3%、50%和66.7%;加载和卸载时可使瞬时电流响应时间分别缩短约45.7%和61%,且各项指标跳变峰值更小,稳定后不波动,验证了双幂次趋近律在升压型直流变换器启动和负载突变情况下,瞬时响应能力更强且电流控制的鲁棒性更优。


