
摘要:针对现有激光平地机的激光接收范围受限和激光接收装置调节困难问题,研制了一种支持激光接收器自动升降的新型激光平地机.介绍了该激光平地机的总体结构、电液控制系统和激光接收器自动升降装置的设计与实现方法.通过农田精平作业试验检测了系统作业精度和作业效果,结果表明试验区域平地后高程标准差不超过2.20 cm,地块平整状况的相对改善度均达到60%以上.此外,针对激光平地机作业效果评估方法的局限,提出了一种定量评估农田地表空间平整程度的指标及计算方法.
关键词:平地机;激光;自动控制;平地精度;标准差
通过平整土地改善农田地表平整度是提高灌溉均匀度和灌溉用水效率的有效手段[1-3],而激光平地机采用激光作为作业区域地表相对高程非视觉测量手段,利用电液控制技术自动调节平地铲升降,可以显著降低人工平地作业操作的误差,提高农田平整作业的精度和作业质量[4-5].国内外研究人员普遍认为,如果以田间地面相对高程的标准偏差值作为土地平整精度评价指标的话,激光平地方法可以使田块平整精度指标达到小于2 cm的水平.近年来,通过引进与消化吸收的方式,国内逐步开展相关技术设备研发应用,取得了较好效果.李益农等[6]从平地效果、平地作业效率和成本费用估算等角度研究了激光平地的效果评价方法,并给出了我国农田激光平地精度的评价指标.侯明亮等[7]研制了配套国产中型拖拉机的激光平地机液压控制阀及控制装置.刘刚等[8-10]开发了一种低成本激光接收与控制装置、液压调节装置和平地铲,田间作业试验效果较好.然而,在实际平地作业过程中,现有激光平地控制系统中存在着诸多影响作业质量和效率的问题[11].比如在目前国内外投入应用的激光平地系统激光接收器的有效接收范围多在20~30 cm,在高差大于30 cm的地块使用时,需要根据作业过程中地形变化不断由人工来调整激光接收器高度来适应高差大的地块.反复停车调整接收器高度导致土地平整效率低下,作业消耗增加.同时,平整高差变化较大的地块时,作业过程中平地铲吃土量过多,铲车内容易积土,导致动力系统牵引负载过大,容易损坏动力系统或平地铲.
本研究针对上述实际应用问题改进设计一种激光接收器自动升降式平地机,并通过农田精平试验验证作业效果.
1 系统设计
本研究设计的激光平地机由激光发射接收装置、平地铲、平地铲液压系统和控制器等几部分组成.如前所述,为解决传统激光平地设备的激光接收器接收范围小、平地铲过载保护和平地铲无效行程过大问题,新型激光平地机增加了激光接收器升降装置、牵引负载传感器和平地铲升降行程控制装置,如图1所示.

图1 液压平地铲
1.1 平地铲设计
平地铲设计包括机械结构设计和液压系统设计.平地铲的机械结构部分主要由支撑轮、平地铲铲刀、挡板、牵引架、切土角调节装置、滑轨、桅杆等组成(图1).根据激光平地机配套拖拉机额定牵引力和平地铲工作时的单位阻力可以核算平地铲宽度和高度.本研究设计的液压平地机针对51.45~58.80 kW拖拉机,计算设计作业幅宽2 500 mm,铲体高度610 mm.平地铲的一个重要参数是切土角,即在工作状态下铲刀面与地平面的夹角.对于精平作业,应在40°~60°范围内选取切土角.考虑到激光平地机在不同土壤条件下的适应性,设计了平地铲切土角调节装置.
考虑平地铲的作业幅宽,牵引架设计为双轴牵引式,有利于增加牵引架牵引平地铲作业过程中的稳定性.牵引式平地机的纵向跨度常用值为4~5 m,牵引架的长度太长导致拖拉机转弯半径太大,牵引架太短,作业机组的机动性会变差,同时考虑配套动力拖拉机的转弯半径,牵引架的长度设计值为1 770 mm,宽度为1 096 mm.液压平地铲的桅杆主要用来固定激光接收器,考虑到激光接收器升降调节功能需要,在桅杆上安装燕尾式滑轨,激光接收器可以在滑轨上滑动从而实现接收器在竖直方向位置可调.
平地铲液压系统包括油源、阀控油缸平地铲升降系统、阀控电动机激光接收器升降系统和阀块、油滤、液压管路等其他液压原件构成,系统原理图如图2所示.
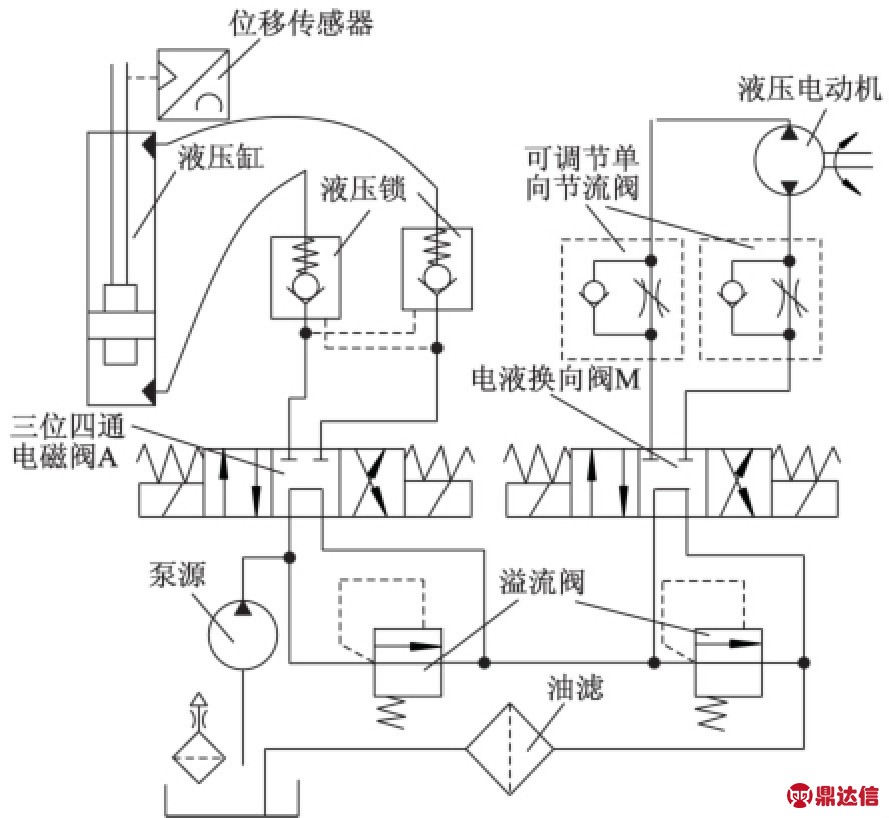
图2 液压系统原理图
系统采用拖拉机后动力输出作为泵源动力,系统工作压力设计在2.0~12.0 MPa范围可调,考虑系统流量和散热等因素,设计油箱容积100 L.平地铲升降动作通过阀控油缸油路实现,采用10通径三位四通电磁阀作为控制元件,三位四通电磁阀A加电可控制液压缸伸缩动作,实现平地铲升降控制[12].激光接收器的升降控制通过阀控液压电动机回路实现,电液换向阀门M加电,可以控制液压电动机正转、反转或停止运行,液压电动机转动通过定滑轮装置带动激光接收器上下升降.此外,还可通过调整可调单向节流阀开度,改变激光接收器升降速度,以适应作业需要.
1.2 激光接收器自动升降控制
在现有激光平地控制系统的平地作业过程中,激光接收器的接收范围一般不超过30 cm,仅适用于高差不大的土地整理.如果作业区域地表高程变化较大,可能使得设定的作业基准面与平地铲所处位置高程差超过激光接收器接收范围,此时激光接收器没有信号输出,平地铲不能正常工作.遇到这种情况,传统激光平地机操作方式是必须停下机组,通过手动调节激光接收器的固定位置,使得激光接收器重新处于能正常接收激光发射器信号的位置,造成平地作业过程设备操作繁琐,影响工作效率.针对这种情况,设计了一种激光接收器自动升降装置,如图3所示.
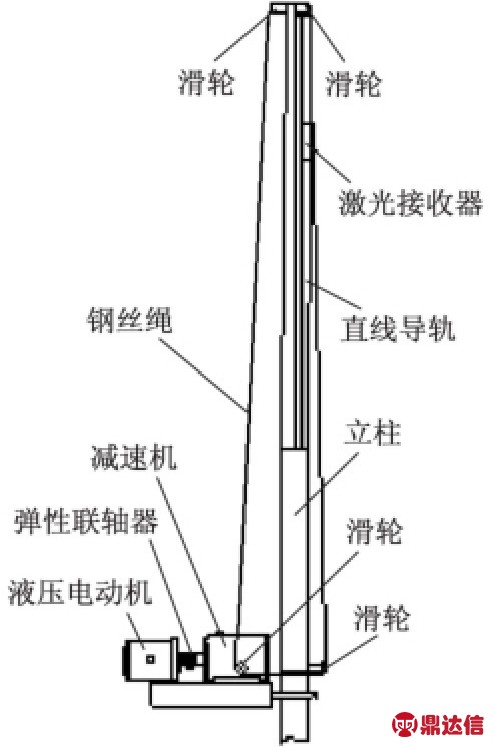
图3 激光接收器自动升降装置
由图3可知该装置由液压电动机、弹性联轴器、减速机、钢丝拉索、滑轮、激光接收器、直线导轨和立柱等部分组成,其中直线导轨和立柱通过螺栓固定连接在一起.由图2所示的液压换向阀输出的液压油驱动液压电动机转动,并控制旋转的方向,通过弹性联轴器带动减速机工作,由减速机带动滑轮转动,钢丝拉索就自动收卷,从而实现激光接收器的上下升降.
1.3 激光平地机控制器
激光平地机控制器是激光平地机的核心控制装置,具有作业信号采集、输出控制和人机交互显示及操纵开关等功能.根据平地机作业控制任务,本研究开发的控制器要求能实时读取激光接收器信号、平地铲负载传感器信号和两路指示液压缸行程极限位置的开关量输入;能输出两路用于阀控缸和阀控电动机回路中的电磁阀功率控制信号;同时应用拨挡开关实现手/自动控制功能切换、平地铲升降操控和激光接收器升降操控输入,采用3排发光二极管(LED)分别指示平地铲当前所处高程与设计高程的3种位置关系.
根据上述功能需要,采用STC12C5AS82型单片机作为主控芯片,通过设计控制器输入信号调理电路和输出控制信号电路,实现激光控制器电路设计,其原理框图如图4a所示.图4b为输入信号调理电路原理图,单片机IO管脚输出TTL电平控制信号,经过74LS07N芯片增大驱动电流,通过光电隔离芯片H11A817CS进行隔离,经上拉电阻R6将TTL电平转换成电压POWERA电平,转换后的控制信号经过IRFU9120进行功率放大来驱动电磁阀.图4c分别为输出控制信号功放电路原理图,拨挡开关输入的开关信号经过光电隔离芯片H11A817CS进行隔离,通过SN74LS04N进行电平反向输入到单片机的IO管脚,单片机通过读取对应IO管脚获得输入的开关信号状态.
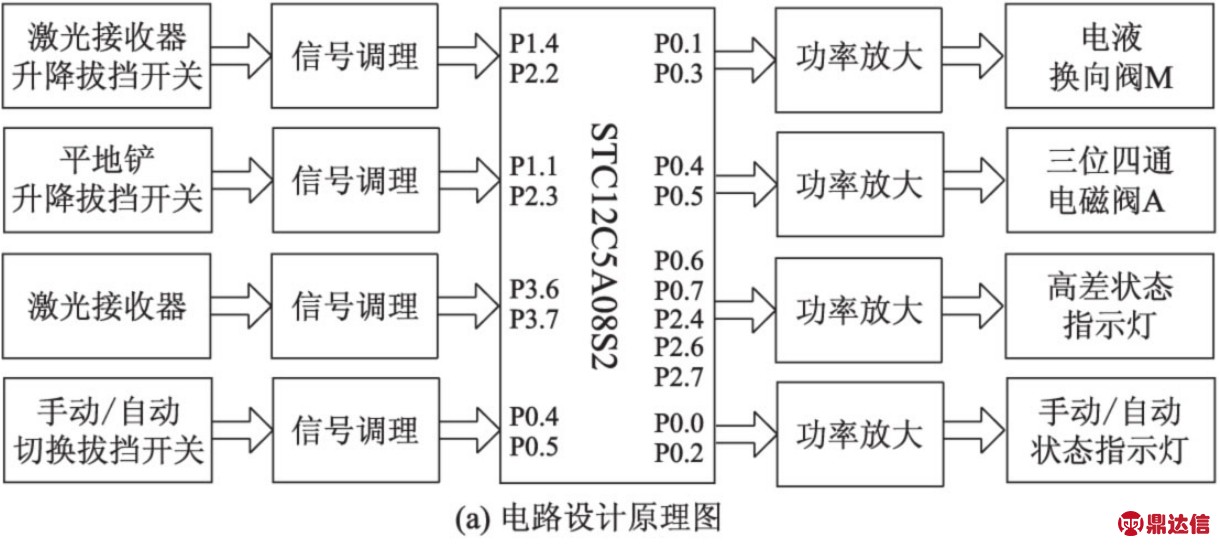
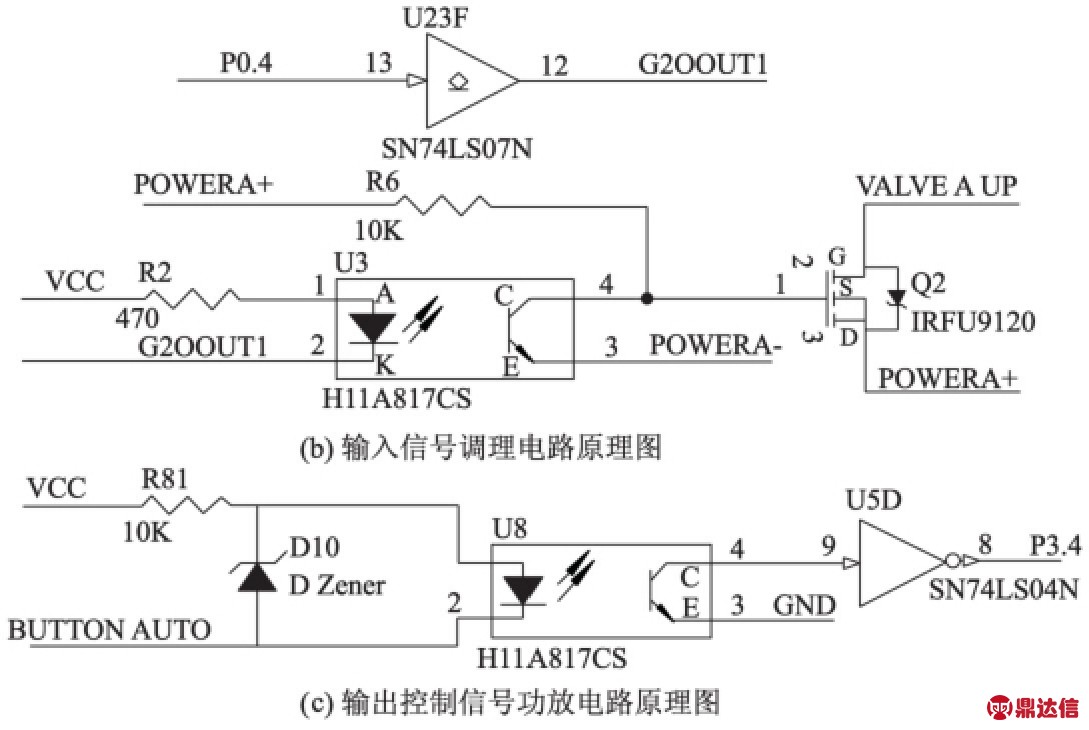
图4 激光控制器电路设计图
控制逻辑设计方面,该激光平地控制器支持手动模式和自动模式.手动工作模式控制逻辑相对简单,主要是通过手动操控按钮分别对平地铲和激光接收器升降运动进行控制.自动模式的控制流程如图5所示.
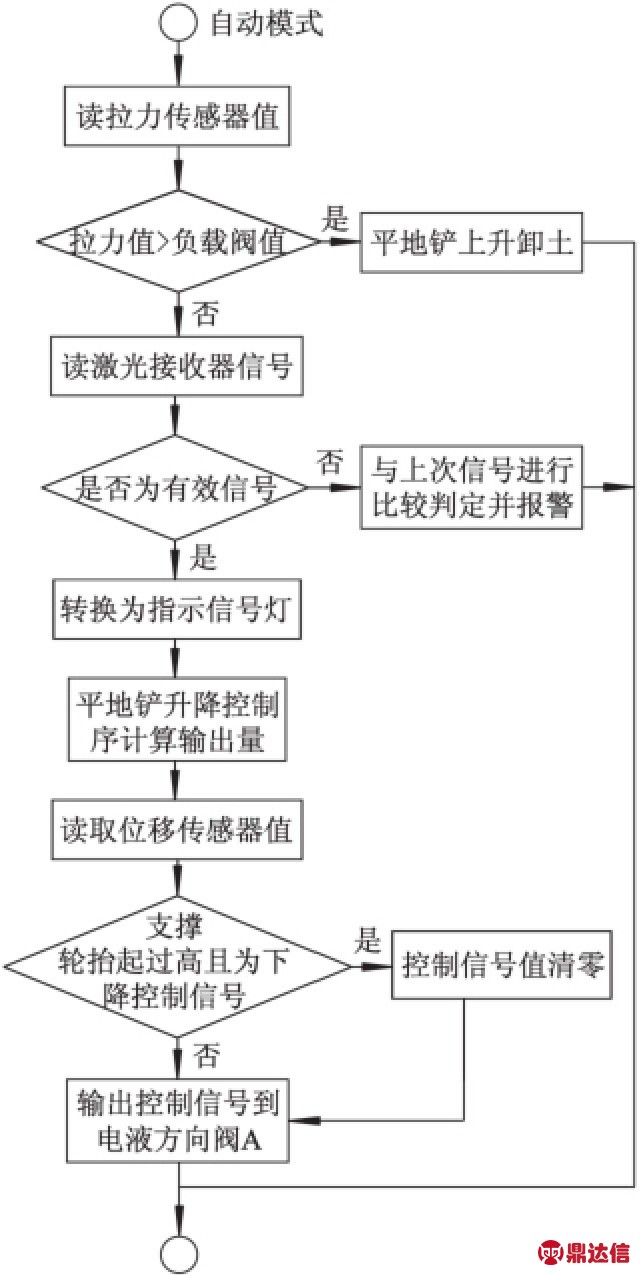
图5 自动模式控制流程图
首先读取平地铲负载传感器信号,并判断负载值是否超过设定的负载阈值,若超过该阈值,系统自动控制电磁阀开闭和液压油流向,驱动液压油缸的伸出,铲刀上升并卸土,从而实现平地铲的过载保护;若负荷低于设定的负载阈值,则控制器读取激光接收器信号,并将信号转换成控制器指示灯状态,并进入平地铲升降控制程序,实现正常升降控制.同时,读取液压油缸行程位移传感器信号,若油缸行程位移信号标识平地铲抬起过高且平地铲当前状态为下降,则发送控制信号给电磁阀A自动停止平地铲支撑轮继续抬高,从而能有效控制平地铲无效行程;否则,输出控制信号到电磁阀A,正常执行平地铲升降控制.
2 系统试验
本研究设计的激光平地机支持激光接收器自动升降,能够较好地解决激光接收范围受限和激光接收装置调节困难问题.为验证改进设计后的激光平地机平整作业效果,进行了实际农田精平作业试验.
2.1 试验方法
结合土地整理项目工程施工,选取项目示范区农田进行土地平整作业试验.精平作业前,进行了农田耕整和粗平作业.在精平作业前后,分别采用实时动态差分全球定位系统接收机(RTK-GPS)进行了作业地块三维坐标测量.为了保证测量数据的精度,试验采用网格法测量,将田块划分为间距5 m的方格网进行精确定位测量.
在土地精平作业后,分别采用了以下2种方法对土地平整效果进行了评价.
1)高程标准差.高程标准差Sd是农田地面相对高程的标准偏差值.高程标准差反映了农田地面平整度的总体状况,能够定量评价田面平整状况的绝对改善程度[7],高程标准差越小,说明农田平整度越高.Sd计算公式为
式中:hi为第i个采样点的相对高程,cm; 为该农田的相对期望高程,cm,即平地设计高程;n为农田地块内采样点的总数.
为该农田的相对期望高程,cm,即平地设计高程;n为农田地块内采样点的总数.
根据土地平整前后的高程标准差,可以计算出土地平整前后的绝对改善度:
式中:Sd为土地平整前的高程标准差;Sd'为土地平整后的高程标准差.而相对改善度则是δ与平地前Sd值的比值.
此外,测点高差分布ED(elevation distribution)也可以反应地面平整程度的分布状况.测点高差分布是计算所有测点的相对高程与期望高程的绝对差值,根据小于某一绝对差值的测点累积百分数评价田间地面形状的差异及其分布的特征.
2)农田地表平整度指数.高程标准差和测点高差分布虽然能够较好地反应农田平整度总体状况,但缺乏空间直观性.文中提出一种基于高差等级空间分布的农田地表平整度评估计算方法,即农田地表平整度指数(farmland surface flatness indicator,FSFI),用来表征土地平整的空间分布状况.该指标能定量表征农田地表平整状况,是一种更为直观且能体现高程空间分布的激光平地机作业效果评估方法和指标.
农田地表平整度指数(FSFI)计算公式如下:
式中:土地平整作业区域的总面积为A,划分r个土地平整等级进行空间分布分析;土地平整等级zi为相对高程与期望高程的绝对差值范围, i为第i等级系数,可取值对应数值范围的中值;Ai为土地平整等级i的空间分布面积.
i为第i等级系数,可取值对应数值范围的中值;Ai为土地平整等级i的空间分布面积.
2.2 试验结果分析
首先进行平整作业前后作业区绝对高程标准差的比较,由公式(1)计算各田块土地精平前后的高程标准差值Sd,结果如表1所示.
表1 土地精平前后高程标准差
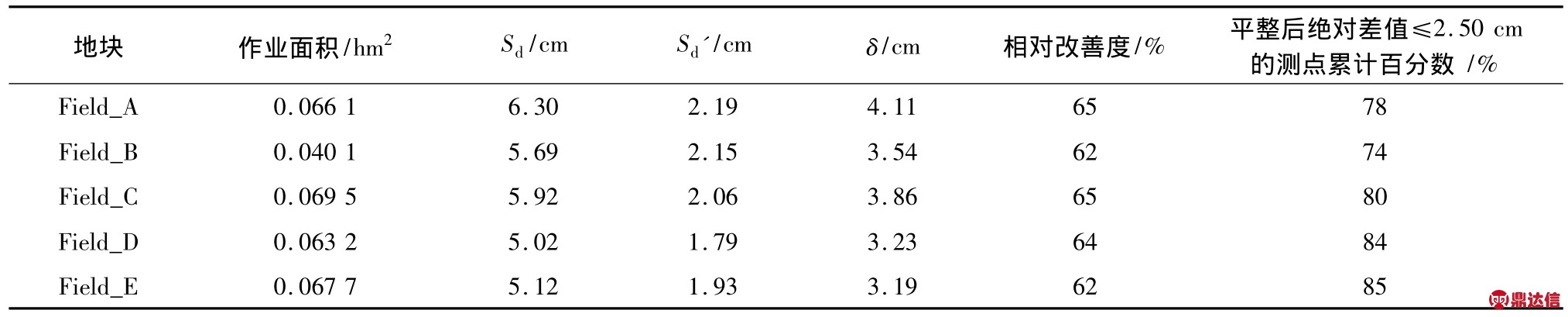
由表1数据可以看出,地块的高程标准偏差值由平地前的5.12~6.30 cm下降至平地后的1.79~2.19 cm,田间平整状况的绝对改善度δ为3.19~4.11 cm,相对改善度均达到60%以上.试验区域土地精平后各地块的高程标准差不超过2.20 cm,高程标准偏差最大值为2.19 cm,最小值为1.79 cm,各地块间的平整度差异较小.本次土地精平试验中,土地平整后地块内高程绝对差值小于等于2.50 cm的测点累积百分数平均在80%以上.
针对本次农田精平作业试验,进行作业区域平整前后农田地表平整度指数的计算和比较.首先,划分4个土地平整等级,分别为0≤z1<1 cm,1 cm≤z2<3 cm,3 cm≤z3<5 cm,z4≥5 cm;分别计算地块平整前后测点相对高程与期望高程绝对差值;然后利用ArcGIS软件对绝对差值进行克里金空间插值生成地块各平整等级空间分布图.图6为地块Field-D和Field-E的土地平整等级空间分布图,左侧为土地平整前的各平整等级空间分布图,右侧为土地平整后的各平整等级空间分布图.
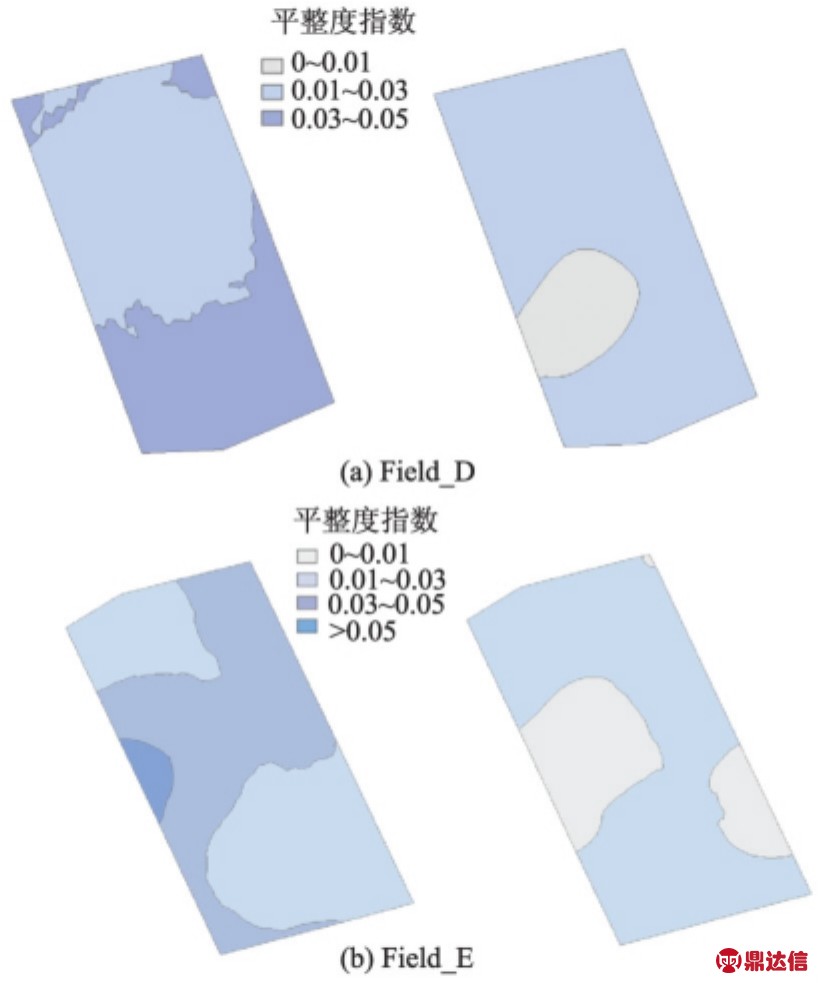
图6 地块平整前后各平整等级空间分布图
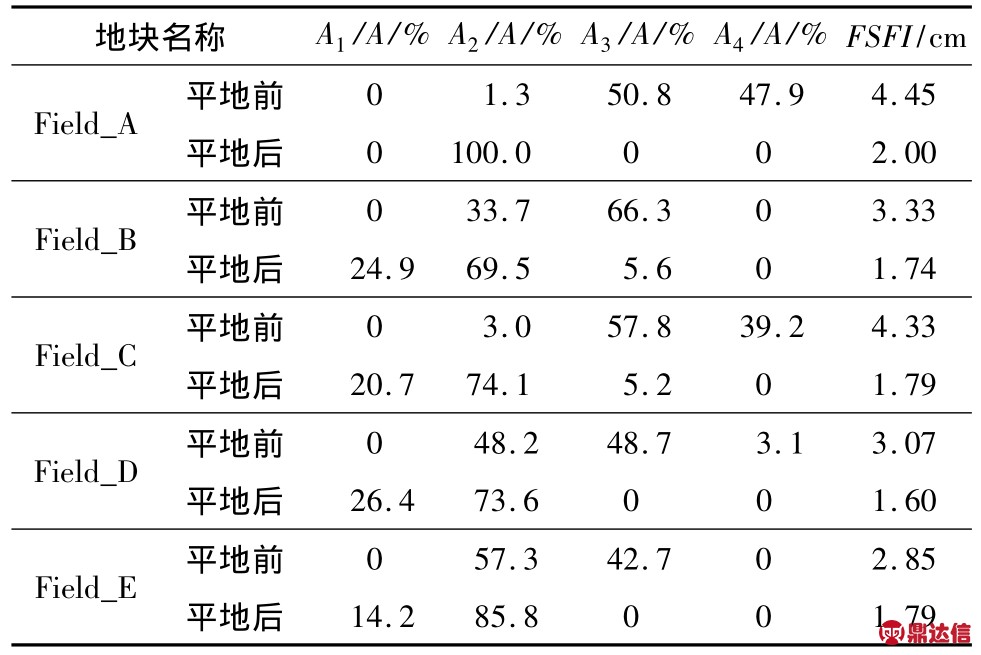
计算各平整等级空间分布区域面积,最后根据公式(3)计算该地块的FSFI,计算结果见表2,其中土地各平整等级的系数取值为1=0.5,2=2,3=4,4=5.由表中数据分析可知,当某个平整等级的分布面积比重较大时,FSFI的数值就更接近于此平整等级的数值范围.显然,FSFI越小,农田地表平整度越高;各地块在平整作业后,FSFI值显著减小.本研究提出的农田地表平整度指数能够在一定程度上反应土地平整状况的空间分布情况.
表2 土地精平前后的FSFI
3 结论
1)研制的激光平地系统由激光发射接收装置、平地铲、平地铲液压系统和控制器等部分组成.其中,设计的激光接收器自动升降装置,运用电液控制技术,实现了激光接收器电液控制高度调节功能;运用拉力传感器和位移传感器技术,有效控制平地铲无效行程,实现平地铲负载过大时平地铲自动升高卸土.
2)农田平地精度检测试验表明:试验区域平地后高程标准差不超过2.20 cm,田间平整状况的相对改善度均达到60%以上.平地后地块内绝对差值小于等于2.50 cm的测点累积百分数平均在80%以上.
3)提出一种定量评估农田地表空间平整程度的指标及其计算方法.该方法能够更为直观地评估激光平地机作业效果,体现土地平整度的空间分布状况.


