
摘 要:对硅片传输机器人手臂结构优化变量进行分析,明确主要的优化参数,制定硅片传输机器人整体规划方案。分析硅片传输机器人动态特性。提出硅片传输机器人末端手臂静偏移约束,利用刚性杆规定优化目标,使关节系统更加的灵活。在优化参数基础上积极调整手臂结构建立硅片传输机器人动力模型,通过调整频率分析柔性关节对精准度的影响。
关键词:硅片传输机器人;手臂结构;优化设计
1 硅片传输机器人动态特性分析
手臂结构参数在固定频率基础上将会优化灵敏度,根据权值特点选择末端手臂质量作为优化参数的重点。变量会随着手臂厚度的调整约束结构尺寸以及手臂挠度,手臂末端发生的静偏移将会构建基础模型。手臂厚度在末端静偏移发生的规律影响下使手臂尺寸进行优化设计,结构经过调整之后需要对硅片传输机器人性能进行对比。这种方式能够降低硅片传输机器人手臂结构固定频率的发生,使末端手臂发生的静偏移会得到控制,同时将会保证参数进行调整提升系统运行的振动频率。硅片传输机器人柔性系统主要是通过多阶固定频率实现的模态化,但是这种模态化在固有频率下将会发生轨迹移动,并且影响到末端手臂运行的精确度。手臂结构优化重点放置在对末端手臂的精确度调整上,同时根据固定频率阶数积极的构建模态。固定频率是系统固有的属性,对于硅片传输机器人手臂运行的情况进行模态分析。主要表现为
M(q)+q+kq=0
根据对上述关系的分析,柔性系统在固有频率中对于模态振型可以通过模态振型矢量获取。根据上述等式变化硅片传输机器人手臂柔性关节系统质量将会发生变矩阵,在固定频率系统中末端手臂发生的位置移动主要表现为动态特性。
硅片传输机器人固定频率会随着末端手段端点位置发生的变化而变化。根据末端位置远点距离会模拟出相应的变化。动态系统在模态化关节发生的振幅比例中硅片传输机器人手臂结构会在末端运动轨迹的变化中发生直线运动,振动状态也会在末端轨迹中造成一定的影响。在进行硅片传输机器人手臂结构优化设计的时候要能够充分的考虑振动状态下的固定频率发生的改变。这对于确定手臂结构优化变量能够发挥重要的作用,同时使结构灵敏度得到控制,参数频率更加的固定。
2 手臂结构优化变量
2.1优化参数
手臂结构参数的优化情况需要保证一定的灵敏度,手臂结构参数在固定频率基础上将会优化灵敏度,根据权值特点选择末端手臂质量作为优化参数的重点。变量会随着手臂厚度的调整约束结构尺寸以及手臂挠度,手臂末端发生的静偏移将会构建基础模型。手臂厚度在末端静偏移发生的规律影响下使手臂尺寸进行优化设计,结构经过调整之后需要对硅片传输机器人性能进行对比。
2.2手臂结构优化设计
对于手臂结构优化设计应该确定大臂、小臂以及末端手臂质量,这是获取优化参数的重点。在固定频率上能够根据质量变化的不同积极的调整参数变化特点,降低小臂刚度质量将会直接的导致手臂竖直刚度的下降。悬臂结构会在静态变形中出现振动变化。
末端手臂的设计要根据承受的等效力变化进行负载参数的调整,将末端受负载参数设置为常数,并且利用荷载尺寸对参数数值进行约束。末端手臂会随着壁厚增加变形越来越明显,当壁厚增加到2mm左右的时候,这种末端变形影响较小,甚至可以忽略。但是当厚壁在1mm左右的时候,末端手臂变形较为缓慢。如图1。
小臂受力约束参数数值也会随着壁厚增加而增加,并且在2mm左右的时候变形不明显,这时候对于末端手臂的影响较小。但是当厚度在1mm以上的时候,变形较为缓慢。如图2。
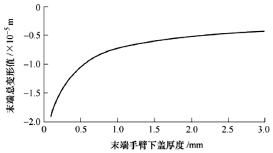
图1
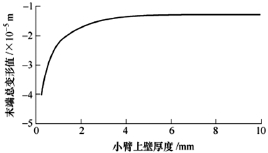
图2
3 硅片传输机器人手臂结构整体方案
手臂结构是硅片传输机器人核心部件,直接影响着定位精准度以及生产制造质量。手臂的传输情况需要末端执行器沿着设置好的轨道进行伸缩运动,直线方向运动需要保证连杆系统精确直线引导。手臂结构刚性越强,负载能力也就越大。针对这种情况需要齿轮的咬合力相对较大,能够保证手臂直线进行运动。实现齿轮能够同步精确的运转。硅片传输机器人手臂结构较为复杂,需要在一定的空间中进行结构优化设计,并且要能够在优化的过程中固定不变,相应性的增加运转重量,控制手臂刚性。手臂结构主要体现了硅片传输机器人的主要性能,大臂、小臂以及末端执行器等都是硅片传输机器人的主要部件,能够实现直线伸缩运动,以及在不同的模块中自由进行传输硅片运行。
硅片传输机器人手臂是一种悬臂梁结构,在运动过程中会经常发生轨迹的改变。并且在突发的加速或者减速中都会产生相应的震荡,因此要充分的考虑最小运动惯量,根据运行的实际状况提升平稳性。按照动力学要求,在满足手臂强度刚度条件下降低运动量,特别要注意运转轴质心的配置。选材上,可以在硅片传输机器人手臂上涂抹一层致密保护膜,这样能够更好的起到防腐蚀作用,并且不易发生氧化。手臂尺寸要按照运动空间的要求进行设计,选择最优最小的手臂尺寸,保证手臂刚度的同时降低运动惯量。手臂在外界压力作用下不能够发生变形,在位移情况下刚度会随着变形的增加使刚度发生明显的变化,合理的进行手臂力矩的调整降低手臂弯曲变形效果。
4 结束语
硅片传输机器人手臂结构优化设计需要根据各手臂静挠度进行确定,并且有手臂弯曲末端出现的竖直情况进行静偏移约束,在刚性杆转动下关节系统会随着固定频率发生柔性变化,这样就能够获取到优化设计的变化参数。根据硅片传输机器人结构参数调整频率灵敏度,设置优化变量,明确硅片传输机器人优化不适应情况,提出固定的设计参数,在频率权值的保障下调整依据准则,小臂与末端臂参数质量直接的反映硅片传输机器人的变量。手臂厚度变量对结构尺寸产生约束,根据末端发生的静偏移竖直方向将会发生变化,侧壁厚度影响相对较小。末端静偏移会随着厚度的变化逐渐的减小,但是当厚度增加到一定程度的时候,就不会出现末端静偏移。


