
摘要:作为一种新型的非接触式检测方法,基于红外热成像技术的机载电路板故障模式诊断方法受到越来越多的关注。本文针对传统基于红外热图的电路板故障检测算法中存在的缺陷,提出一种结合红外图像分割、热阻网络、支持向量机SVM(Support Vector Machine)与D-S证据理论的故障检测算法。首先,通过红外图像分割完成目标芯片区域温度提取,应用热阻网络模型对目标区域温度信息进行优化;其次,提取温度信息特征向量分别输入对应的初级SVM诊断模块,输出各故障模式的加权基本概率分配值BPA(Basic Probability Assignment);最后,应用D-S证据理论对各证据体加权BPA进行数据融合,输出融合后的故障诊断结果。实验结果表明,本文算法加强了有效证据体对诊断结果的正面影响,削弱了无效证据体的负面影响,大幅度提高了机载电路板故障模式诊断准确度。
关键词:红外热图;机载电路板;支持向量机;证据理论;故障诊断
0 引言
随着民航业对航空安全的要求越来越高,快速并准确的对机载电路板的各种故障进行分析和定位,并依此保障飞机的安全运营就变得至关重要。而高新技术不断注入使得机载电路板变得越来越复杂,呈现出高密度、超大规模等特点。传统的接触式电路板故障诊断方法主要依靠经验丰富、技能较高的测试人员依据电路原理、电路参数和故障现象进行分析,从而诊断出电路板上的故障内容或元件。传统的接触式检测方法不仅可能影响电路板的分布参数,而且耗时长不易操作。
基于红外热图像的电路板故障检测技术属于非接触式的无损检测方法[1],避免干扰被测电路工作状态,并以其检测速度快、成本低、通用性强和易操作的等优点[2]而深受广大研究者的关注。中国民航大学王力团队做了大量的关于将红外技术应用于机载电路板故障诊断的研究,包括机载电路板卡红外图像配准、分割和增强[3-5];文献[6]将标准与故障状态下的热图像进行差分操作,通过与设定阈值的比较判断电路板的工作状态,该方法存在漏诊与误诊;文献[7]综合概述了红外故障检测方法,认为目前各种检测方法均有其缺点与局限性,缺少通用的理论模型可供使用;文献[8]提出使用最小二乘四次多项式拟合法配合环境温度计算元件内部结温,与经验阈值比对后来判定故障,但阈值的设定缺乏科学准则与理论支撑;文献[9]将序列热图法应用于电路板故障检测之中,通过比对不同状态下元件的温度变化曲线、特征信息来判断是否存在故障,但缺乏对故障的智能判断。
在前人研究基础上,本文针对机载电路板提出了一种基于红外热图的智能故障诊断算法。首先,应用红外图像分割提取目标芯片发热区域;其次,依据双热阻网络模型优化目标芯片温度信息,获取芯片结温;再次,提取目标温度信息构成SVM故障诊断算法输入特征向量,输出初级诊断结果;最后,基于D-S证据理论融合初级诊断数据,输出最终故障诊断结果。实验表明,该算法大幅度提高了机载电路板故障模式的诊断准确度。
1 目标区域温度信息提取与优化
1.1 基于图像分割的目标信息提取
电路板在工作时其板载元器件的温度特性应处于合理范畴,同一元器件在正常与故障两种工作状态下会表现出不同的温度特性,这为基于红外热图像的故障检测提供了前提条件。红外热像仪获取的电路板红外图像一般包含3个区域:发热区、辐射区、背景区。发热区是元器件工作状态的核心区域,因此首先要消除辐射区与背景区影响,将核心发热区独立出来。但是,高集成度的电路板红外热图易受到成像环境等外界因素影响,其图像对比度差、信噪比低,元件排列密集,这为目标区域的分割与温度提取制造了一定的困难。
针对上述难点,文献[10]中所提出的算法,将多目标区域增长算法与GVF-Snake模型相结合,完成机载电路板红外图像元器件芯片核心发热区域的信息提取。
步骤1:设定阈值D_temp,自动搜索红外图像I寻找温度最高点H_temp,当H_temp与D_temp之差大于环境温度,则确定该点为初始种子点P1,依据生长与停止规则完成目标区域M1的提取,得到新图像I1;步骤2:对新图像I1重复步骤1,获取目标区域M2及新图像I2;步骤3:以此类推,直到新图像In中最高温度与阈值之差小于环境温度时,认为所有芯片的发热区与辐射区提取完毕;步骤4:基于区域增长确定GVF-Snake模型的初始轮廓;步骤5:利用GVF模型完成目标芯片发热区域的提取。具体算法流程图如图1所示。
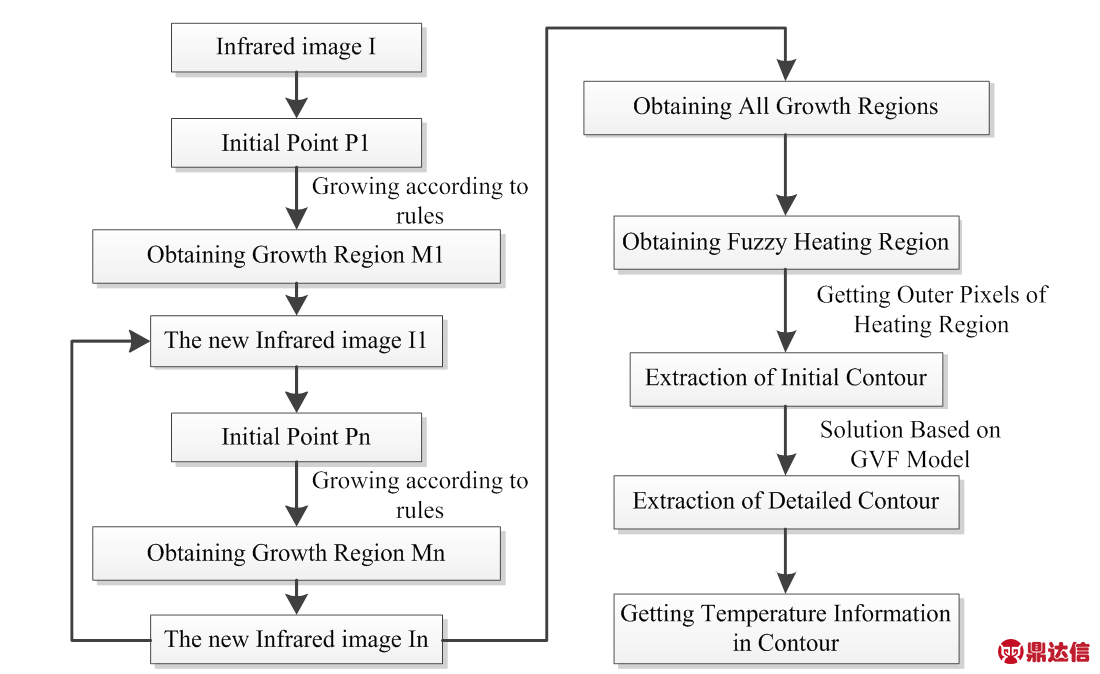
图1 机载电路板红外图像分割流程图
Fig.1 Circuit board infrared image segmentation flow chart
1.2 基于热阻网络的目标温度信息优化
红外热图像每个像素点所标示的温度并非芯片结温,而是热传导后封装表面的温度值,在基于温度信息的故障检测中,真实结温更具有研究价值。本文中,机载气象雷达电路板上元器件芯片的封装主要为塑料四侧引脚扁平封装PQFP(Plastic Quad Flat Package),依据电子器件工程联合委员会JESD15-3标准中的规定[11],在稳态情况下,将该类型芯片等效变换为如图2所示的双热阻网络模型,包括2个热阻和3个节点。其中,Rjc为结节点到壳的热阻;Rjb为结节点到板的热阻;Rja为壳(板)节点到环境的内阻。壳节点表示封装上表面直接接触部分;结节点即芯片核心功耗产生部分;板节点为封装底部直接连接部分。
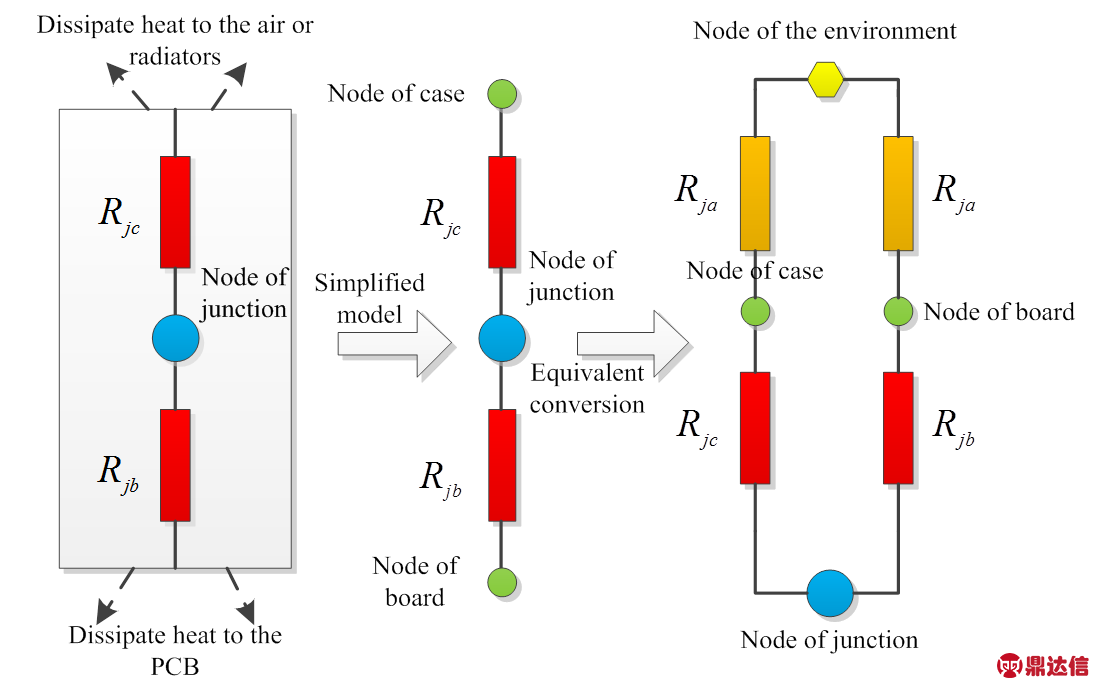
图2 PQFP封装双热阻网络模型
Fig.2 Dual thermal resistance network models of PQFP package
基于PQFP封装双热阻网络模型,依据式(1)~式(3)求取芯片结节点温度Tj。
Tj=P×Rjc+Tk (1)
Tk=P×Rja+Tc (2)
Tj=((Tk-T)/Rja)×Rjc+Tk (3)
式中: Tk为壳节点温度,Tc为环境节点温度,均可以通过红外热像仪直接测量得到。
1.3 目标区域温度特征向量提取
通过红外热像仪获取机载电路板从上带电至稳定工作状态下的序列红外热图像X张,依据“像素点-温度”对应关系,将m×n个像素点的红外图像,转换为m×n的X维温度矩阵。
依据1.1节红外图像分割算法,完成X维矩阵的目标发热区域提取,基于热阻网络模型优化算法对分割区域内的温度信息进行优化,获取芯片结温矩阵并提取以下温度信息值组成特征向量,如式(4)所示:
V=[T T¢T²] (4)
式中:T表示目标芯片稳定工作时,其轮廓区域内x个像素点位置的平均温度,如式(5)所示:
T=(t1+t2+…+tx)/x (5)
式中:tx表示目标芯片轮廓内某像素点所对应的芯片结温值。T¢表示在X张序列图像中,目标轮廓区域内芯片结温的平均温度变化率序列,如式(6)所示:
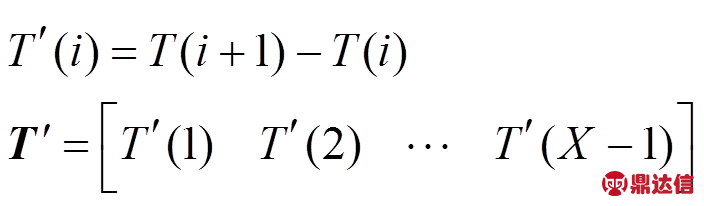 (6)
(6)
式中:T(i)为第i张序列图像中目标芯片轮廓内均值。T²表示X张序列图像中,目标轮廓区域内芯片结温平均温度的变化加速度,如式(7)所示:
 (7)
(7)
式中:T¢(i)表示i张到第i+1张图像目标芯片轮廓平均温度变化率。
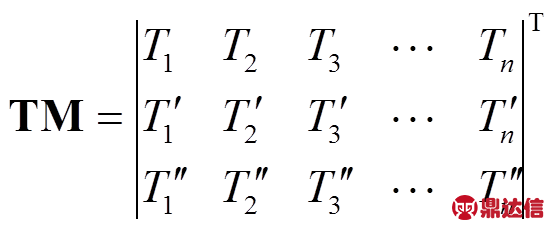
针对机载电路板上参与故障诊断的n个芯片温度信息建立特征矩阵TM,其行向量为不同芯片温度特性,反映了芯片当前工作状态:
(8)
2 基于SVM与D-S理论的故障模式诊断
为解决传统基于红外图像故障诊断中普遍存在的阈值设定不科学、数据样本需求大、抗干扰差、诊断准确率低等问题,本文将SVM理论与证据理论相结合完成电路板故障模式诊断。
首先,针对不同的温度特征组成的SVM故障模式诊断模块,将已获取的各芯片温度特征信息作为其输入向量,输出初级诊断结果及BPA;其次,基于D-S理论,完成基于加权后各证具体BPA的数据融合;最后,输出故障定位诊断结果。算法流程如图3所示。
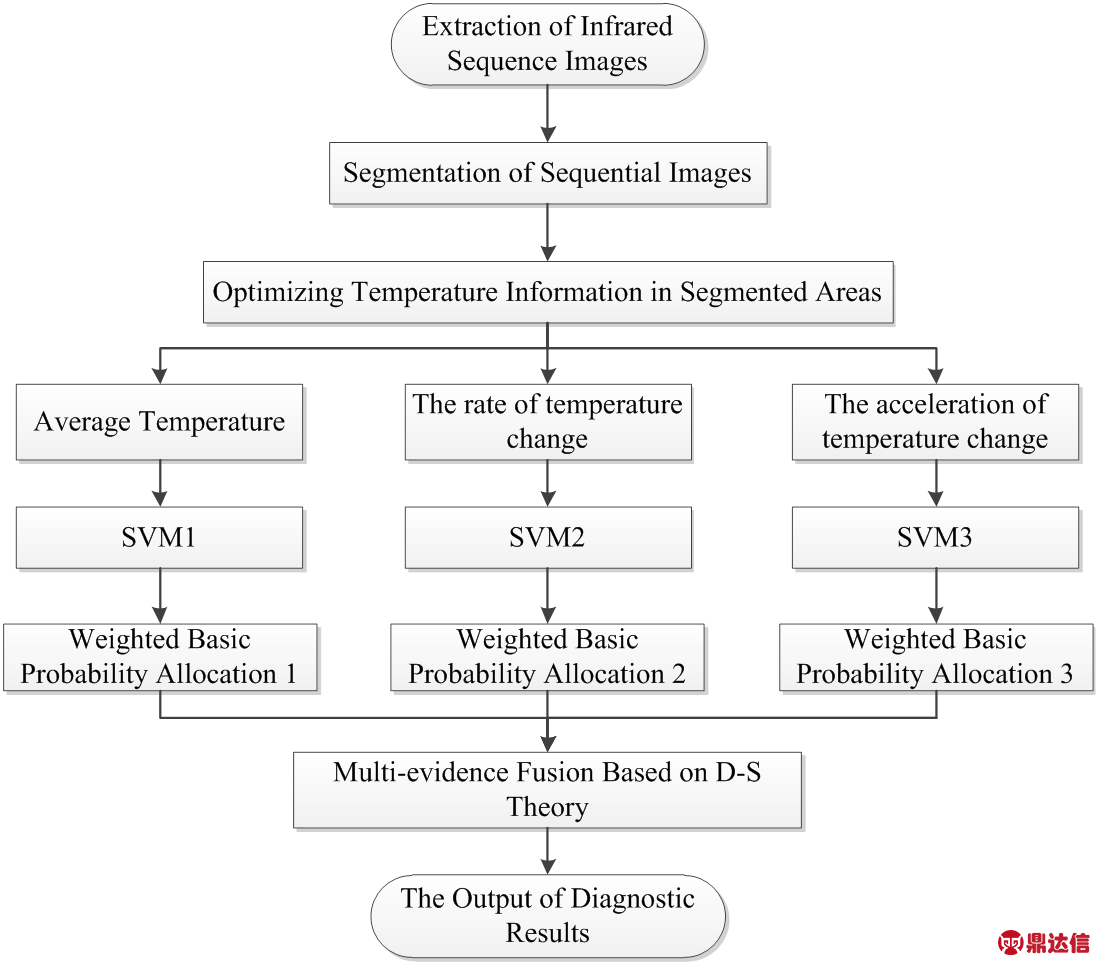
图3 故障诊断算法流程图
Fig.3 Flow chart of fault diagnosis algorithm
2.1 基于SVM的故障定位诊断模块
对于机载电路板芯片正常与故障两类模式分类问题,以(Ti, yi)作为样本输入,其中Ti∈Rn为芯片的工作温度数据;yi∈(1, -1)为分类标签,1表示正常,-1表示故障;应用SVM理论寻找最优超平面,使正常与故障两类之间的间隔最大,将寻优过程归结为二次规划问题,如式(9)所示:
 (9)
(9)
约束条件:
 (10)
(10)
xi≥0 (11)
式中:C为惩罚因子,直接影响分类器泛化能力与误分类率;w为权向量;b为分类阈值;xi为松弛变量;在非线性情况下引入变换j:Rn®F,把样本从输入空间映射到高维特征空间F,使得原空间非线性可分的两类样本在高维空间线性可分,通过引入拉格朗日函数,得到优化问题式(9)的对偶形式,即最大化函数为:
 (12)
(12)
约束条件:
 (13)
(13)
通过解式(12)优化问题,最终得到支持向量机的最优分类决策函数如式(14)所示:
 (14)
(14)
式中:ai为拉格朗日算子,k(xi, xj)=j(xi)×j(xj)为核函数。
依据SVM基本原理,将1.3节中温度信息特征矩阵TM列向量分别输入对应的SVM的初级诊断模块,则共有(2n-1)种故障可能被各个诊断模块输出,令N=2n-1,将各诊断模块输出值组成混淆矩阵CM,对故障模式样本真实属性与诊断类型之间的关系:
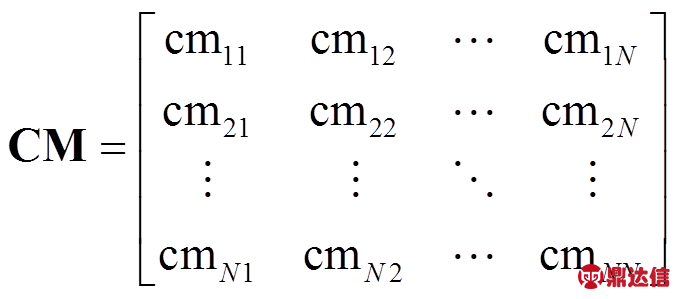 (15)
(15)
式中:cmij表示第i类芯片故障被初级诊断模块诊断为第j类故障的概率,反映了不同SVM诊断模块的可靠度,可靠度越高表示该SVM诊断模块输出的结果越可信,式(16)是对于第j类故障的可靠度:
 (16)
(16)
对n个芯片可能产生的N个故障模式可采用“一对一”算法建立N(N-1)/2个SVM子分类器,对故障类别进行投票。若将第i类故障判断正确,则投票结果为“+1”;若将第i类故障判断为j类,则投票结果记为“-1”,引入隶属度概念,如式(17)所示:
 (17)
(17)
式中:SFj为两两分类时对j类故障判断正确的次数;N-1为j类参与的总分类次数。分类器无法识别的类,则通过式(18)对不确定隶属度予以表示:
 (18)
(18)
对于j类故障,依据“一对一”SVM分类器原则,隶属度越大,不确定隶属度越小,那么该故障属于j类的可能性就越大,其对应的BPA也就越大,由此得到j类故障的BPA的获取准则为:
 (19)
(19)
式中:M为各类故障模式的隶属度之和,表示故障的分类规模。
2.2 基于D-S理论的判别结果融合及诊断决策
D-S证据理论是将同一个框架下的不同证据体通过融合规则合成新的证据体的过程。本文将机载电路板上n个芯片可能出现的N种故障集合作为辨识框架 ,Aj为辨识框架的一个基元,在该框架中集函数
,Aj为辨识框架的一个基元,在该框架中集函数 :
:
 (20)
(20)
式中:m为故障识别框架内的基本概率赋值函数,对于 ,m(A)称为A的BPA,该值可以理解为对该故障模式的确认程度。假设在统一框架下m1和m2是同一识别框架下的BPA,基元分别E1, E2, …, EN和F1, F2, …, FN,那么可以按照式(18)所示,将两个证据体BPA进行合成,记为m1Å m2:
,m(A)称为A的BPA,该值可以理解为对该故障模式的确认程度。假设在统一框架下m1和m2是同一识别框架下的BPA,基元分别E1, E2, …, EN和F1, F2, …, FN,那么可以按照式(18)所示,将两个证据体BPA进行合成,记为m1Å m2:
 (21)
(21)
 为规范数,反映了证据冲突程度,值越小则冲突越大,当N为0时表明证据完全冲突,合成公式不再适用。
为规范数,反映了证据冲突程度,值越小则冲突越大,当N为0时表明证据完全冲突,合成公式不再适用。
对于上述问题,本文不再将所有证据体视为同等重要,而是对不同模块的诊断结果,按照式(19)对诊断模块进行权重系数的重新分配:
 (22)
(22)
综合证据体权重系数及基本BPA,依据式(23),充分考虑各特征向量权重,对证据体故障BPA重新加权,以加强合理证据削弱不合理证据:
 (23)
(23)
依据式(18)类推,多证据体融合公式为:
 (24)
(24)
按照下面决策1~3将加权BPA进行结果判别,从而获得最终诊断结果:
决策1:目标模式与其他模式下的BPA相比最大。
决策2:目标模式与其他模式下的BPA之差要大于阈值e。
决策3:目标模式的不确定度要小于阈值g。
3 实验结果分析
针对本文提出的机载电路板故障检测方法,使用德国InfraTec(英福泰克)ImageIR系列红外成像热像仪,提取空客A320机载气象雷达A31板卡上芯片工作正常和故障状态下红外热图,如图4所示。
限于本文篇幅,选择其中故障率最高的U3、U4、U5芯片作为故障研究对象,针对8种可能存在的工作模式(编号F1-F8)分别采集100组红外图像数据,每组数据采集时间为3min,图像采集间隔3s,将采集的红外图像数据组成图像序列。
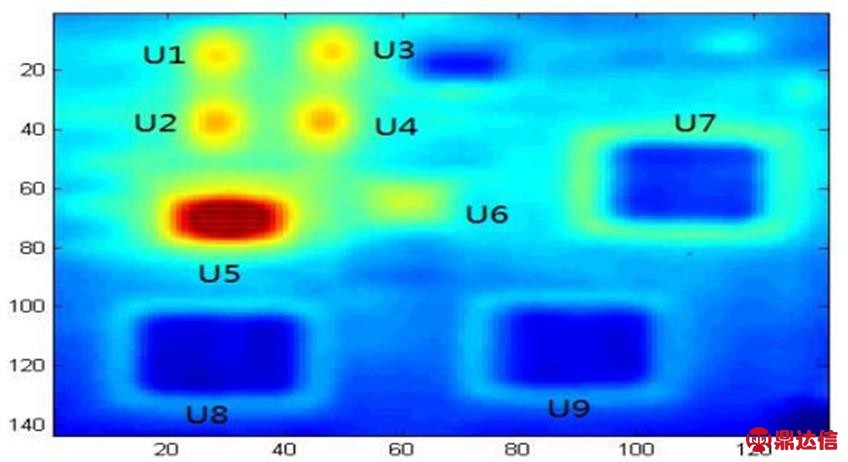
图4 机载气象雷达红外热图
Fig.4 Infrared Image of Airborne Air Radar
依据本文1.2节图像分割算法,完成各模式下红外序列图像目标芯片分割,如图5所示。
将分割后的目标芯片红外图像转化为对应的芯片温度矩阵,依据1.2节算法,对8种故障下的各100组数据完成基于热阻网络模型的芯片温度矩阵优化,提取T、T¢、T²作为故障诊断特征向量,输入初级SVM诊断模块,输出证据体对各故障权重系数。
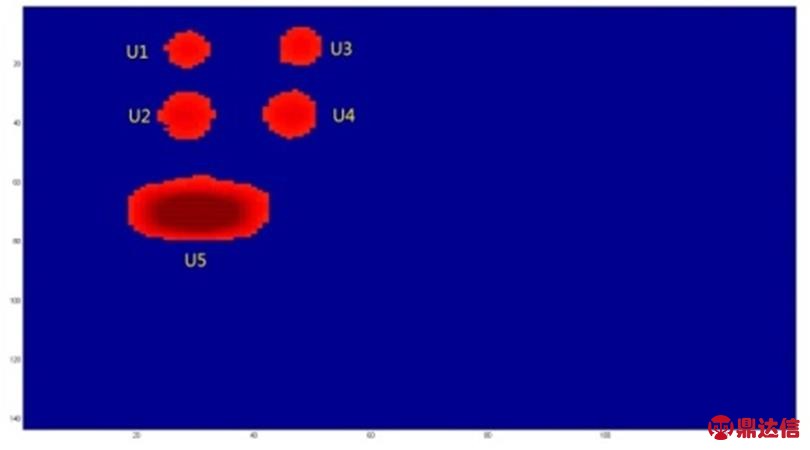
图5 目标芯片红外图像分割
Fig.5 Infrared Segmentation Image of Target Chip
选取故障编号为F2的样本作为验证数据,依据本文2.1和2.2算法,得到各证据体下的诊断结果,即不同证据体下各类故障的BPA和加权BPA,如表1和表2所示。
依据本文2.2节的3个故障诊断决策,选择阈值e=0.5,g=0.01。对表1和2分析可以发现,故障模式F2下3种证据体所提供的BPA与加权处理前相比均有所提高,但是依然无法同时满足3个故障判定决策,即无法提供有效的故障诊断结果。而经过基于D-S理论的证据体融合后,如表3所示,与单证据体下相比,故障模式F2的BPA均有显著大幅提高,同时对于故障检测影响最大的F4模式的BPA则呈现出明显的降低。将本文2.2节的3个故障诊断决策应用于D-S证据融合后的结果,可以发现表3中除“T¢&T”证据融合下的数据不能给出明确诊断结果外,其余融合结果均能输出正确故障模式,其中“T&T¢&T²”3个证据体融合后故障模式F2的BPA值最大且不确定度最小,故障模式的诊断结果准确度最高。
本文最后分别选用典型的热图序列法、单证据体SVM诊断法和本文算法对100组已知故障类型的机载电路板做验证型诊断,诊断效果如表4所示。
表1 不同证据体下各故障模式BPA
Table 1 Failure mode BPA under different evidence

表2 不同证据体下各故障加权BPA
Table 2 Failure weighted BPA under different evidence

表3 基于D-S理论的故障诊断结果
Table 3 Fault diagnosis results based on D-S theory

表4 四种故障诊断结果对比
Table 4 Comparison of four fault diagnosis results
通过与其它方法的对比可以发现,本文算法在故障诊断的准确率方面远远高于传统的热图序列法与单证据体SVM诊断算法。其主要原因是由于本文不仅通过图像分割与热阻网络模型对原始红外数据进行了优化,获取了更为准确的温度信息,更关键的是故障诊断算法中对于各个证据体所提供的诊断结果进行了加权处理与融合,最终在诊断结果中加强了有效证据对于诊断结果的正向影响,同时削弱了无效证据负面影响,降低了误判率。
4 实验结论
本文以机载电路板工作芯片的红外热图作为原始数据,通过对红外图像的分割以获取准确的目标芯片温度数据范围;利用热阻网络对目标芯片温度数据进行优化,获取更有效的芯片核心温度数据;将目标芯片核心温度数据作为输入,利用SVM故障分类算法完成故障初级诊断,输出各故障加权BPA;最后,基于D-S理论完成各故障BPA融合,得到最终诊断结果。通过实验数据分析可知,本文算法的故障诊断率优于传统算法和原始SVM诊断算法,故障诊断率大幅度提高。在机载电子设备获取大量典型故障样本和先验知识都比较困难的前提下,本文算法将会有效解决民航机务维修中存在的实际故障诊断问题,减少机载电子系统的故障发生率,降低维修成本,为民航飞行安全提供有力保障,具有一定的现实意义。


