
摘 要:在建立气垫式流浆箱数学模型的基础上,利用神经网络原理设计了神经网络解耦控制器。根据总压和浆位给定值以及其输出值,通过自学习、调整网络权值来实现闭环控制的神经网络解耦控制思路,将强耦合的总压和浆位分解为两个单回路PID闭环控制系统。采用PID控制算法对解耦后的两个单回路闭环系统进行常规控制。实际运行效果表明,该控制系统可使总压和浆位的调整互不影响,且系统稳定。
关键词:气垫式流浆箱;神经网络;解耦控制
气垫式流浆箱的作用是把浆料均匀稳定地流送和喷射到成形网上,抄造出定量合格、纤维组织均匀的优质纸张。如果从流浆箱喷出的浆速不正常,纸浆就会在成形网上产生纤维絮聚和条痕,严重影响纸张质量。气垫式流浆箱的控制参数主要有总压和浆位。控制总压是为了获得均匀的上网纸浆流速和流量;控制浆位是为了获得适当的纸浆流域以减少横流和浓度的变化,产生和保持可控的湍流以限制纤维的絮聚。由于气垫式流浆箱的机械结构和控制工艺要求[1],气垫式流浆箱控制系统的设计具有以下难点:①由于总压参数与上网浆速呈二次方的非线性关系,给系统的总压控制带来设计上的困难;②流浆箱控制模型结构和控制参数会受到外部众多因素的影响,造成控制对象的不确定性和时变性;③流浆箱控制系统是复杂的多变量控制系统,其总压参数和浆位参数相互关联,相互耦合,必须采取解耦控制。
1 气垫式流浆箱数学模型的推导
气垫式流浆箱的控制原理如图1所示。图1中,P为流浆箱内部气垫压力,h为流浆箱浆位高度,Pt为流浆箱底部总压,Q1为上浆泵的上浆量,Q2为罗茨风机的进风量,Ph为进浆压力,Ps为进风压力,Qs为上网浆速,Q0为流浆箱的排气量,I1和I2分别为控制上浆泵和罗茨风机变频器的电流。进入流浆箱内变化的纸浆流量Q1和空气流量Q2,分别由上浆泵变频器和罗茨风机变频器控制的电机转速来实现,见公式(1)和公式(2)[2]。

(1)

(2)
式中,Kv1、Kv2分别为上浆泵变频器结构常数和
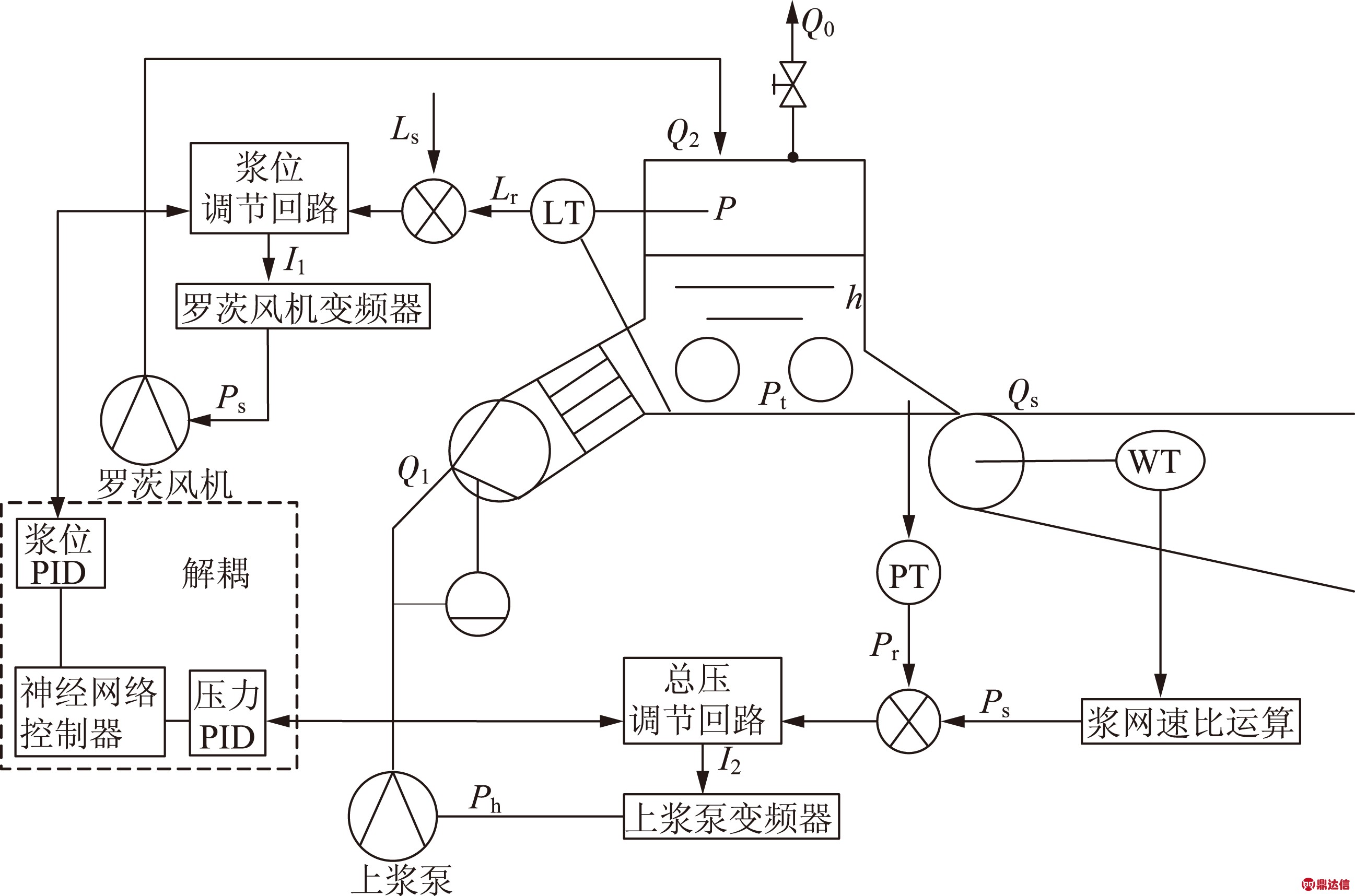
图1 气垫式流浆箱控制原理图
罗茨风机变频器结构常数。
浆位h的动态方程见公式(3)[2]。
(3)
式中,K1为常数,ρs为纸浆密度,g为重力加速度,A为流浆箱内液面面积。
压力P的动态方程见公式(4)。
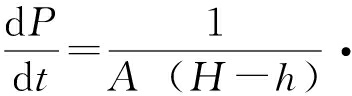

(4)
式中,H为箱体总高度,P0为大气压力,K2为常数。由以上公式可以得出气垫式流浆箱的整体数学模型见公式(5)[2]。
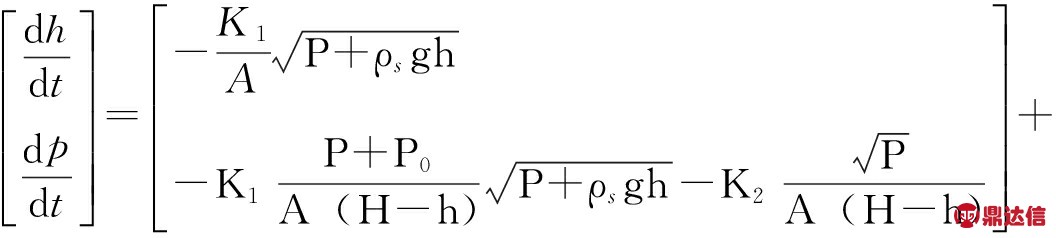

(5)
输出方程见公式(6)。
(6)
从公式(6)可以看出,状态h出现在分母上,P有P3/2项,P与h有相乘和相除项,从物理意义上讨论,流浆箱总压随着浆位的升高和罗茨风机转速的提高而增大,但是浆位随着浆泵转速提高而升高的同时,随着风机转速的提高而降低,故气垫式流浆箱是一个非线性较为严重的控制系统[2]。根据冲浆泵特性的比例定律可知,改变转速时的流量与转速间的变化为正比关系[2]。由此得到,进入流浆箱内的纸浆流量Q1和空气流量Q2与各自变频器电流I1,I2的关系分别为:
Q1=Kj1I1 Q2=Kj2I2
(7)
(8)
将式(8)在工作点附近线性化,去掉根号,得到气垫式流浆箱模型的传递函数为公式(9)。
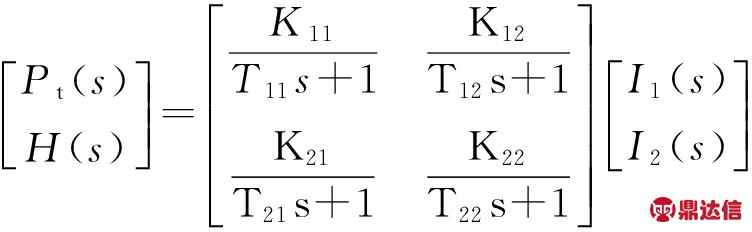
(9)
针对气垫式流浆箱控制系统,由实验测得数据,将输入输出进行归一化处理后,得到广义的气垫式流浆箱模型的传递函数为公式(10)。
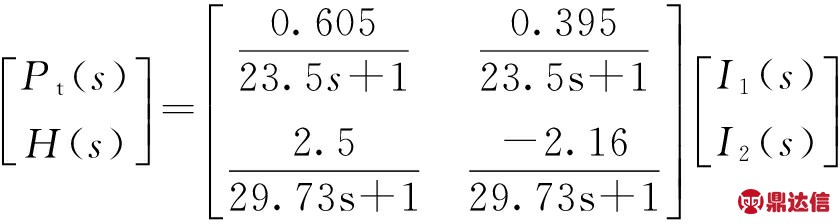
(10)
其相对增益矩阵A为公式(11)。A![]()
(11)
式中,O为开环增益矩阵。
从上述结果可以看出其相对增益在0.3~0.7之间,所以该系统为强耦合系统,必须采取解耦措施[2-3]。
3 神经网络解耦控制器的设计
神经网络解耦原理就是设计一个计算机网络,用它去抵消过程中的关联。使包含解耦控制器在内的广义对象传递函数变为对角阵,由此解除过程中的耦合,使控制系统变为单回路系统。由于流浆箱系统具有非线性,传统解耦方法既难以实现,又无法在整个工作曲线范围内完成解耦工作。而人工神经网络借助于可训练性和结构的通用性,赋予其自适应能力,能逼近任意L2上的非线性函数,且不需要精确的对象模型,实现起来简单方便[4]。满足解耦控制要求,从而构成基于神经网络的解耦控制。
3.1 神经网络解耦控制器的结构
由于气垫式流浆箱控制系统为总压与浆位的强耦合二维输入输出系统,在具体实现过程中,采用具有一个隐含层的BP网络,隐含层的个数选为5个,神经元的活化函数取为G(x)=(1-e-x)/(1+e-x)=tanh(x),网络结构如图2所示。其网络训练参数:动量项因子α=0.7,学习率η=0.02,迭代次数Ep=28000,学习误差e=0.001。
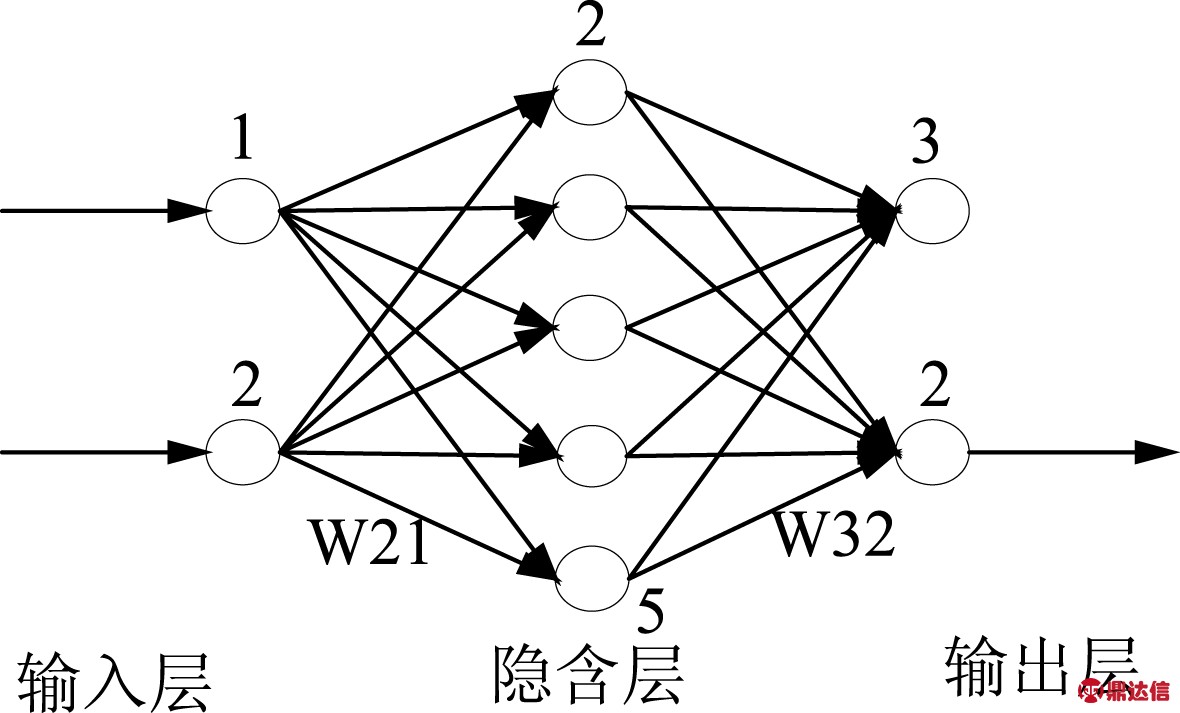
图2 BP神经网络解耦控制器框图
3.2 神经网络解耦控制器输入输出对的确定
神经网络解耦控制器的输入变量分别为总压和浆位的PID控制器的输出;输出变量分别为总压和浆位回路的实际输入。系统控制框图如图3所示。
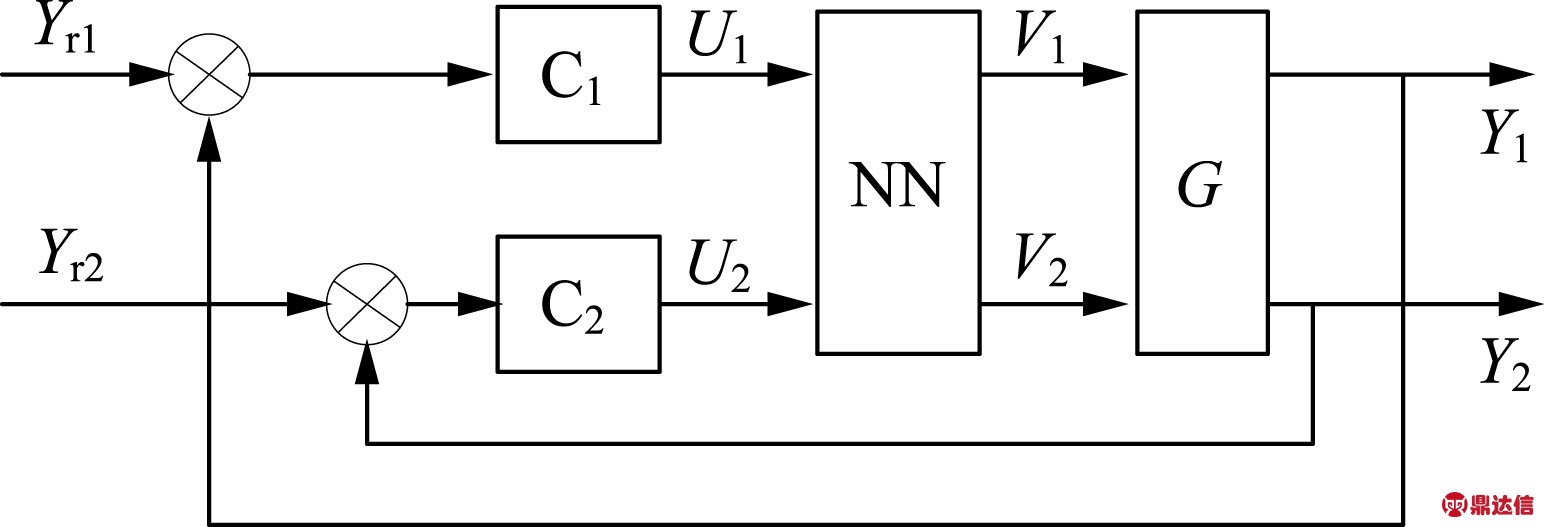
图3 神经网络解耦控制框图
图3中的NN为神经网络解耦控制器,C1、C2为常规PID控制器,G为流浆箱原始传递函数。其中V1、V2为被控系统原始输入,Y1、Y2为被控系统原始输出。解耦控制的目的是使包含NN在内的系统广义传递函数为两个单回路控制系统,即Y1只跟随U1,Y2只跟随U2。由此可以得出,只要神经网络解耦控制器的输入输出为原始系统输入输出的反函数关系,即NN的输入数据为被控系统的输出数据,NN的输出数据为被控系统的输入数据,即可使包含神经网络解耦控制器在内的广义被控系统变为输出完全跟随输入的单回路控制系统[4-5]。故取神经网络控制器的输入输出对为原始对象的输出输入对,进行网络训练。
3.3 神经网络解耦控制器的训练
根据现场采集的被控对象输入输出数据对和事先确定好的网络结构,利用仿真软件Matlab强大的神经网络工具包,采用BP网络系统辨识函数对神经网络解耦控制器进行训练。简单方便地得出各个网络权值、阈值,得到所需的静态神经网络解耦控制器。
4 解耦控制器仿真结果
在Matlab中进行仿真,根据控制的具体效果,验证此方案的可行性。在不带解耦的流浆箱PID控制系统框图如图4所示。
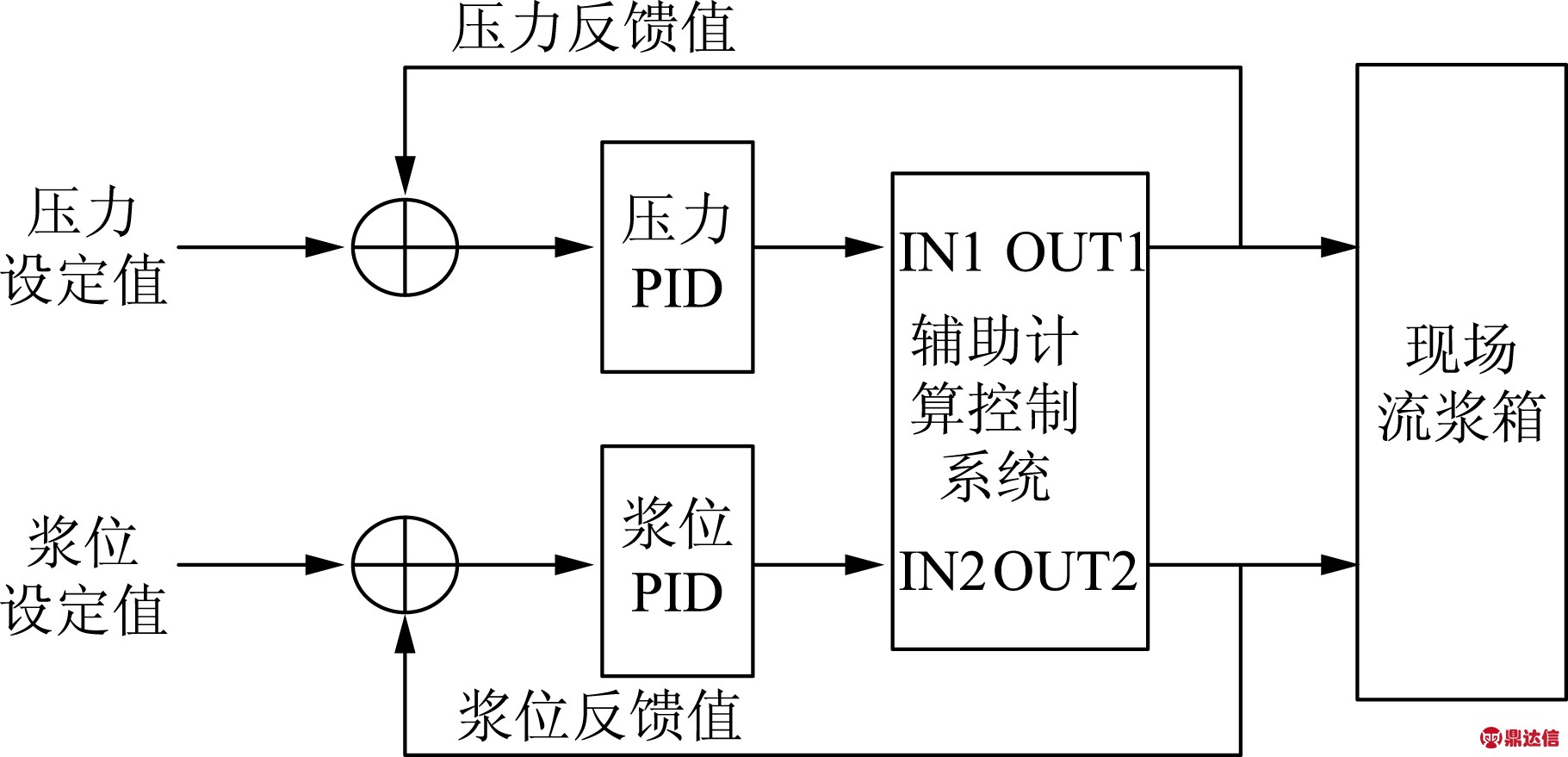
图4 传统流浆箱PID控制系统框图
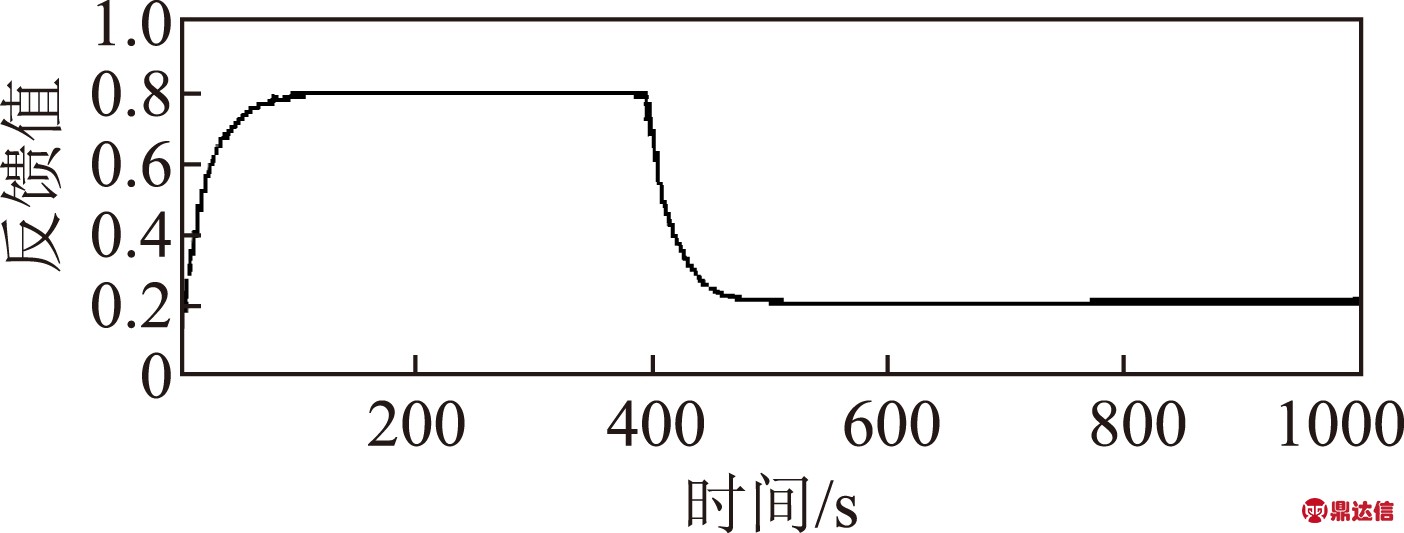
在传统流浆箱控制系统中,给定不同的压力信号和浆位信号,通过Matlab仿真效果来看,总压反馈值在第400个采样周期从原来的0.8反馈值变到0.2反馈值;而液位反馈值在第200个采样周期从0.2反馈值升到0.6反馈值。采样曲线如图5和图6所示。
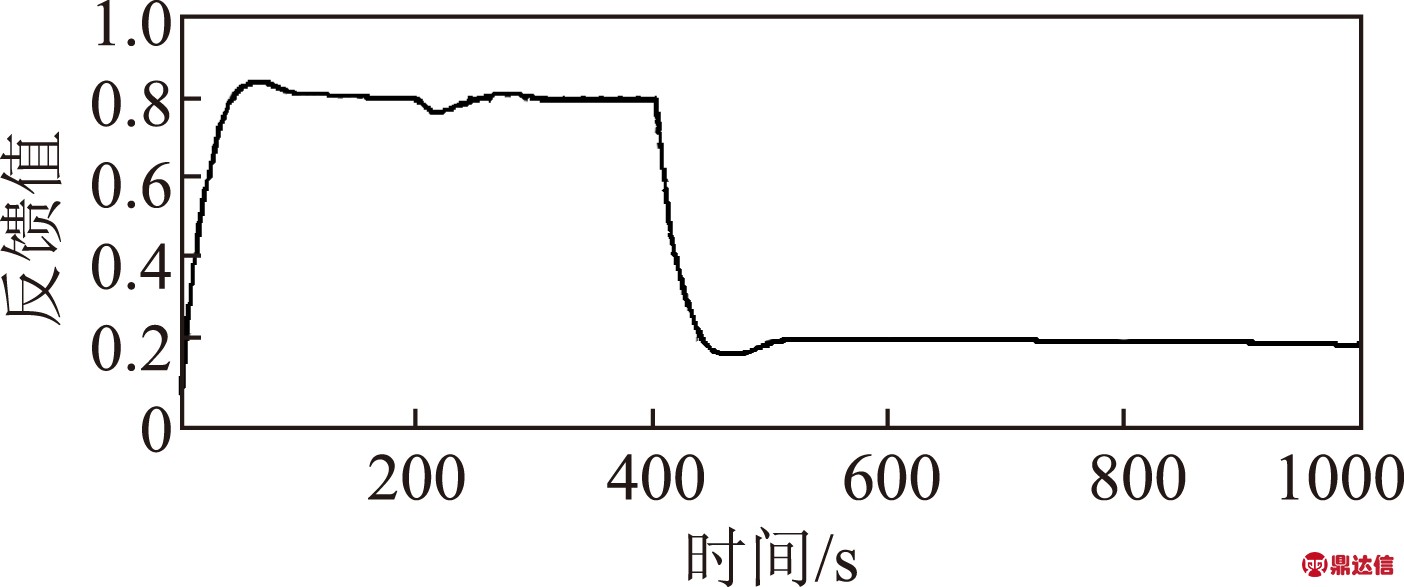
图5 传统PID控制系统总压仿真图
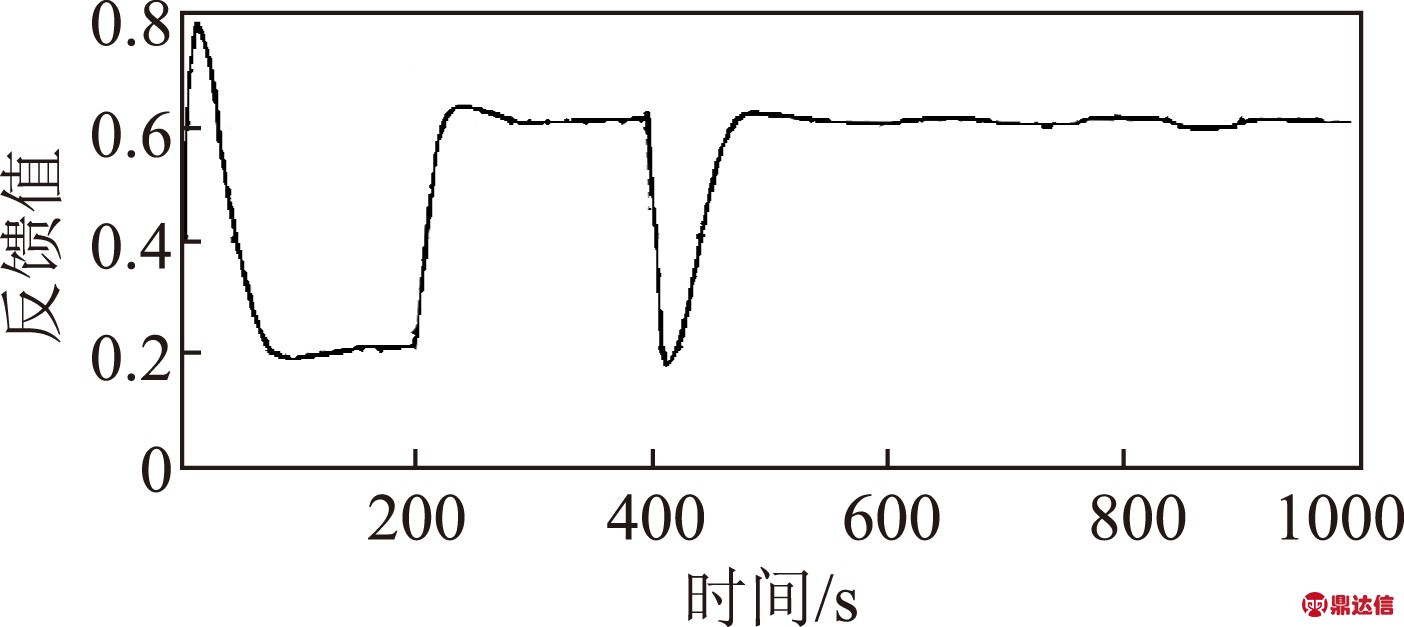
图6 传统PID控制系统浆位仿真图
通过Matlab的仿真效果可以看出,总压和浆位之间存在强烈的耦合关系,而且总压给定值的变化或浆位给定值的变化都会给对方带来显著的影响。不利于气垫式流浆箱现场控制和调节。如果在传统流浆箱PID控制系统中加入神经网络解耦控制器,控制效果将非常显著,控制系统总压和浆位的控制互相干扰较小。神经网络解耦控制PID控制系统的控制框图如图7所示。
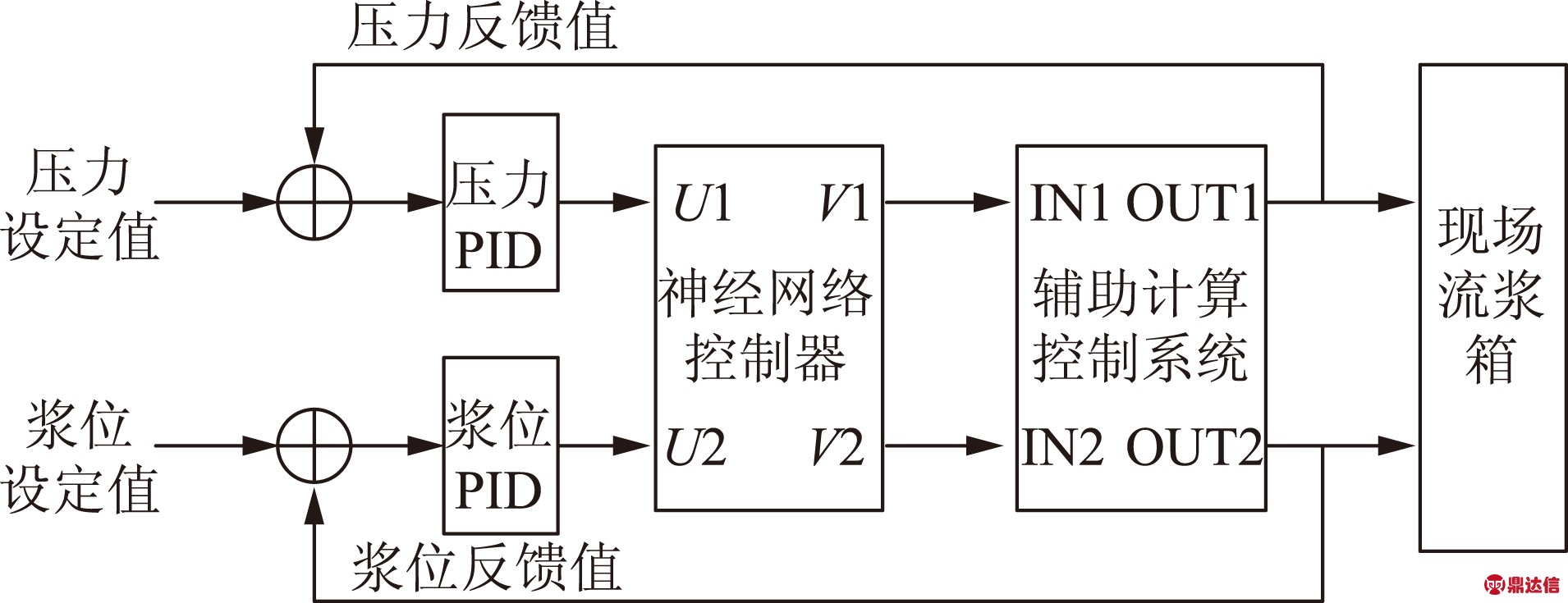
图7 神经网络解耦PID控制系统框图
在神经网络解耦PID控制系统中,神经网络解耦控制器为已经训练好的控制器,PID控制器采用的是不完全微分PID控制器,此控制算法具有加速动态过程控制、可以实现无超调控制并且鲁棒性好,稳定性很好。
在神经网络解耦PID控制系统中,给定不同的压力信号和浆位信号,通过Matlab仿真效果观察,总压反馈值在第400个采样周期从原来的0.8反馈值变到0.2反馈值;而液位反馈值在第200个采样周期从0.2反馈值升到0.6反馈值。采样曲线如图8和图9所示。
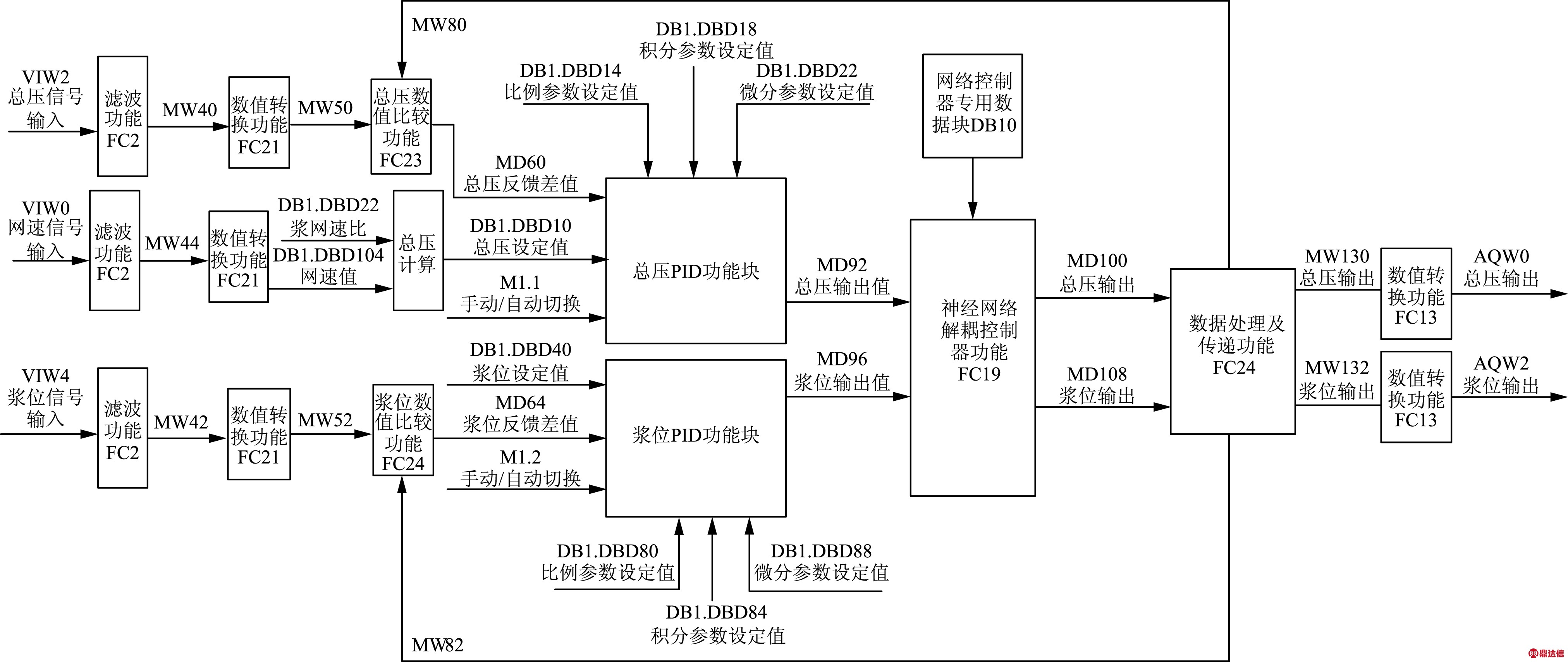
图10 控制系统程序设计框图
图8 神经网络解耦PID控制总压仿真图
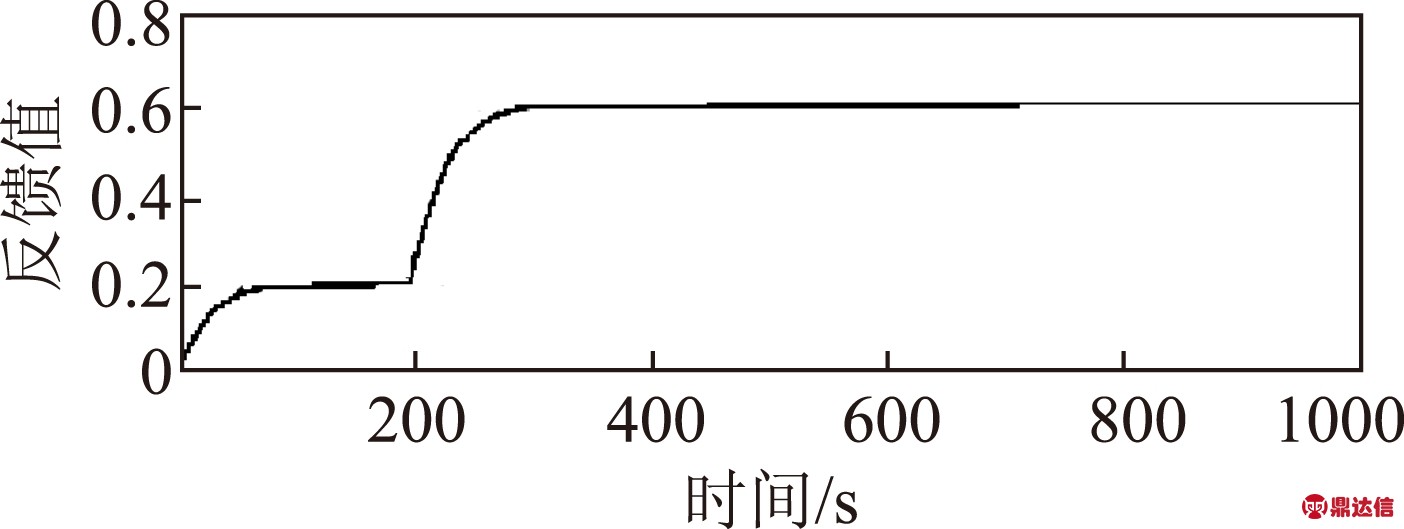
图9 神经网络解耦PID控制浆位仿真图
通过Matlab仿真效果来看,神经网络解耦PID控制系统总压和浆位符合工艺要求,总压反馈值完全跟随总压给定值,并且对浆位基本不产生影响;同时浆位反馈值完全跟随浆位给定值,并且对总压基本不产生影响。可以说总压和浆位之间的耦合关系被解除,总压和浆位形成了两个单独的控制回路,达到了现场气垫式流浆箱控制的效果[5- 6]。
5 神经网络解耦PID控制在程序中的设计
根据神经网络解耦PID控制原理,在系统设计时思路如下:①对总压、浆位和网速信号的滤波处理、数值转换,并与传递函数功能块来的总压值和浆位值进行比较,计算各自总压和浆位的差值。②建立神经网络控制器以及保存网络权值、阈值的数据块,根据BP网络系统辨识函数对神经网络解耦控制器进行训练,计算出各个网络权值、阈值。③根据训练好的网络权值、阈值对神经网络控制器进行调试和数据分析,达到现场工艺使用条件。④将总压和浆位的PID控制器输出值送入神经网络控制器,通过计算得出解耦后的总压和浆位的单回路输出值。⑤将来自神经网络控制器输出的总压和浆位值通过传递函数计算和反馈,得出结果进行数值转换,并输出值模拟量输出模块,控制冲浆泵和罗茨风机。程序设计框图如图10所示。
6 结 语
神经网络解耦PID控制系统通过Matlab仿真达到了流浆箱控制总压和浆位的工艺要求。通过实验室制作的流浆箱模型进行测试,实际运行的响应速度和仿真的曲线图基本一致,成功解决了总压和浆位强耦合的控制难题。通过对神经网络解耦PID控制器的程序设计以及实际运行表明,此控制系统可使总压和浆位的调整达到互不影响的效果,系统稳定,效果满意。


