
摘要:针对某款SUV车架第5横梁上板与纵梁总成焊接过程搭接间隙过大问题,进行搭接面焊接匹配,得到匹配样件后进行三坐标扫描,利用CATIA软件逆向开发进行模块三维建模,Geomagic Qualify软件进行拟合,验证了结果的正确性。
关键词:车架横梁;焊接匹配;三坐标;CATIA;逆向开发
随着汽车产业的快速发展,人们对汽车的要求不再简单地以代步为唯一要素,汽车设计的精密性和可靠性成为人们追求的重要要素。车架是连接车身和悬挂系统的关键部件,需要承受来自车身的载荷及路面传递冲击的相互作用,其强度和精度要求较高。焊接匹配工艺是影响汽车车架制造精度的一个重要因素,通过一套精确的焊接匹配方法,不仅能够保证汽车车架各重要安装尺寸的精度,还可以减少车架返工补焊,提升其整体的焊接强度,增强其可靠性。现以国内自主研发的某高端全地形SUV为例,以其车架第5横梁上板的匹配为研究对象,对车架的焊接匹配过程进行分析[1]。
1 焊接问题分析
车架第5横梁是由上板和下板焊接而成,焊接时会产生热变形,焊接冷却后产生Y向收缩变形,设计状态的车架第5横梁如图1所示。
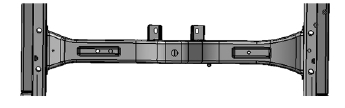
图1 车架第五横梁
Fig.1 The fifth frame beams
在设计状态下,车架第5横梁两端搭接面Y向距离为1 006 mm,搭接面状态为与Z向平行。原状态的第5横梁上板二维图和三维数模分别如图2、图3所示。
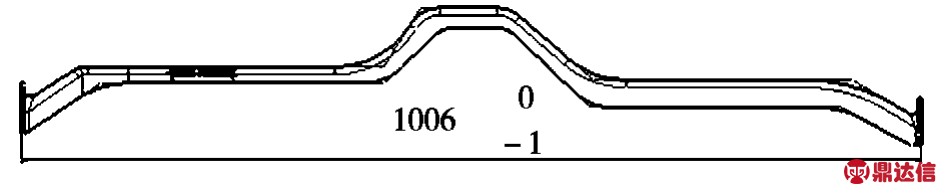
图2 第5横梁上板二维图
Fig.2 The fifth frame beams 2-dimensional diagram

图3 第5横梁上板三维图
Fig.3 The fifth frame beams 3-dimensional diagram
在焊接工装进行焊接匹配时,车架第5横梁焊接总成在与纵梁总成焊接过程中,在工装上定位完毕后,会出现搭接间隙过大的现象[2](横梁两端搭接面与纵梁存在3~4 mm间隙,而机器人焊接过程中,焊丝允许的焊接间隙一般为0.5~1.5 mm)。间隙过大将会产生咬边、漏焊现象,需要后续人工补焊,和横梁搭接边修边,严重影响了生产自动化程度,增加了人员的工作强度[3]。为此,通过对第5横梁上板左、右两端搭接面的调整,找到与纵梁总成装配的最佳搭接面状态[4]。将该最佳状态的制件作为样件三坐标扫描后进行数据固化和逆向开发建模。
2 数据采集
利用三坐标扫描仪对样件第5横梁上板的外部表面进行打点扫描。扫描时探头保持匀速运动,对定位孔处扫描空位特征,扫描后的点云数据保存为文本格式,在CATIA软件中打开如图4所示。

图4 扫描数据点云
Fig.4 The Scanning point cloud data
3 逆向开发设计
3.1 软件建模
在CATIA软件的逆向开发设计模块,对导入的点云数据进行处理,即将多余的点云删除,对点云的密度进行过滤,生成面域状态的图像[5],如图5所示。

图5 面域模型
Fig.5 Surface of the domain model
根据扫描的点云数据,在CATIA软件逆向开发模块进行三维建模。以第5横梁上板的主定位孔为基准进行铺面,结合曲面设计模块,生成面体三维数模,然后在零件设计模块生成实体数模,如图6所示。

图6 逆向开发后三维数模
Fig.6 3-dimensional model after reverse development
图7为开发前后车架第5横梁上板数模对比图。从图7可以看出,逆向开发的第5横梁上板三维实体数模与原状态的三维数模主体基本一致,但在左、右两端发生了变化。第5横梁上板两端搭接面由Z向竖直面变为斜面,左端伸长最大值为3.165 mm,右端伸长最大值为2.56 mm。
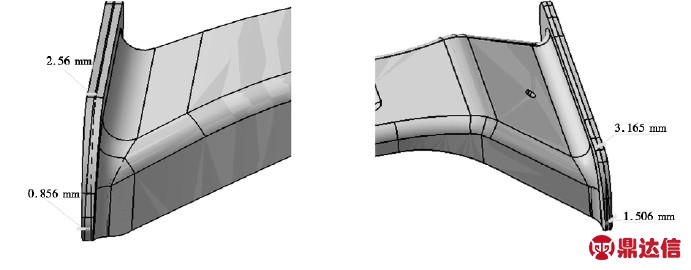
图7 开发前后车架第5横梁上板数模对比图
Fig.7 Before and after matching contrast figure
3.2 拟合效果
基于Geomagic Qualify软件,将逆向开发的三维曲面数模与点云数据导入软件,以主定位孔为基准,进行自动最佳拟合对齐,然后进行3D比较,得到拟合后的效果云图[6]。其中左右两端搭接面的拟合效果如图8、图9所示。
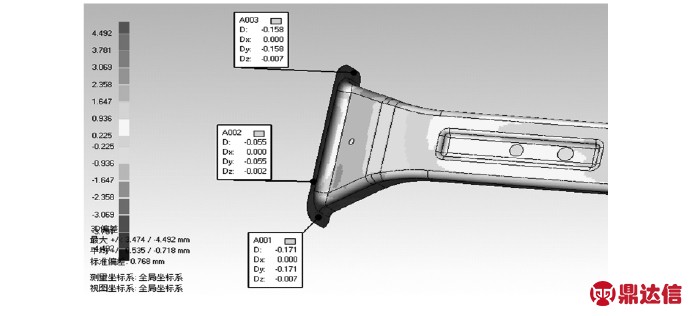
图8 左端拟合效果图
Fig.8 The left side fitting effect
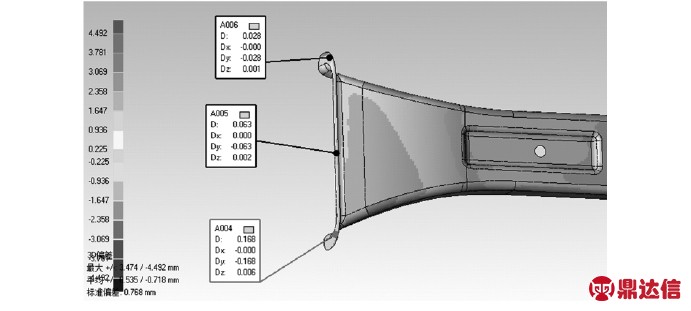
图9 右端拟合效果图
Fig.9 The right side fitting effect
从图8、图9可以看出逆向开发的第5横梁上板两端的三维面体基本与扫描的点云数据重合,拟合结果如表1所示。
表1 左、右端拟合结果
Table 1 The right side fitting effect
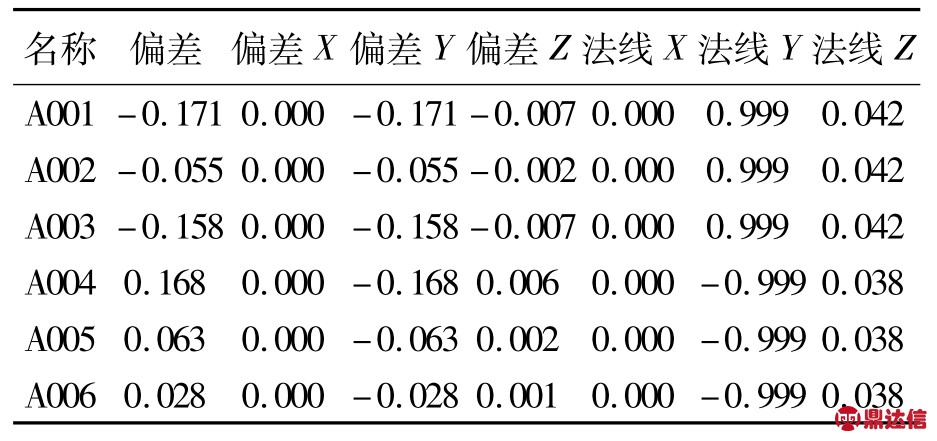
从表1可以看出逆向开发的三维面体与扫描的点云数据在X方向和Z方向的偏差值都较小,对整体偏差的影响程度较弱,可以忽略不计;而Y方向的偏差是其主要的影响因素[7]。表1左、右两端搭接面处点 A001-A006偏差绝对值在0.055~0.171之间,满足逆向开发的要求。可以将此逆向开发的三维模型数据固化,用于后期模具和检具的开发[8]。
4 结论
针对某款SUV车架第5横梁上板与左、右纵梁总成焊接过程搭接间隙过大问题,在焊接工装进行搭接面焊接匹配,得到匹配样件后进行三坐标扫描得到点云数据,将匹配数据在CATIA中进行逆向开发并三维建模,通过Geomagic Qualify软件对逆向开发的数据进行拟合,验证了结果的正确性,最后将匹配数据进行固化,用于后期模具和检具的开发整改。


