
摘要:在角钢码垛机械手机构运动学分析的基础上,研究机械手导轨倾斜角度对末端执行器位移、速度和加速度的影响,得出最佳的倾斜角度,使得机构运行的稳定性进一步加强,降低机械振动,达到对机构进行优化的目的。
关键词:机械机构;倾斜角度;优化
0 前言
随着钢铁工业连续化和大型化的不断发展,为提高作业率,减少故障率,节能降耗,改善产品质量,生产国民经济发展急需的新品种,许多环节都已非人力所能及,自动化装备已经成为钢铁工业不可或缺的关键设备,成为提高生产力的重要要素之一。
角钢是一种常见的建筑结构和工程结构材料,主要用于金属构件及厂房的框架,广泛应用于各种房梁、桥梁、输电塔、起重运输机械、船舶以及仓库货架等场合。角钢的轧制生产中,在矫直后打捆前的环节就是码垛,现在很多钢铁企业中,有的还在采用原始的人工码垛,工人劳动强度大、码垛效率低下,而且码垛效果不好、参差不齐,影响产品的外观质量,不便于后续运输,而且很容易使产品变形。由于人力存在的缺陷,严重制约着码垛效率和码垛质量,而现有的角钢码垛机体积庞大,生产效率低下,容易出错,已经成为影响钢铁企业生产效率的关键因素。根据国内的现状,设计了一种角钢码垛机械手。该角钢码垛机械手占用体积小、快速准确,大大提高了码垛效率和码垛质量。
1 角钢码垛机械手的机械结构简介
角钢码垛机械手的机械结构如图1所示。
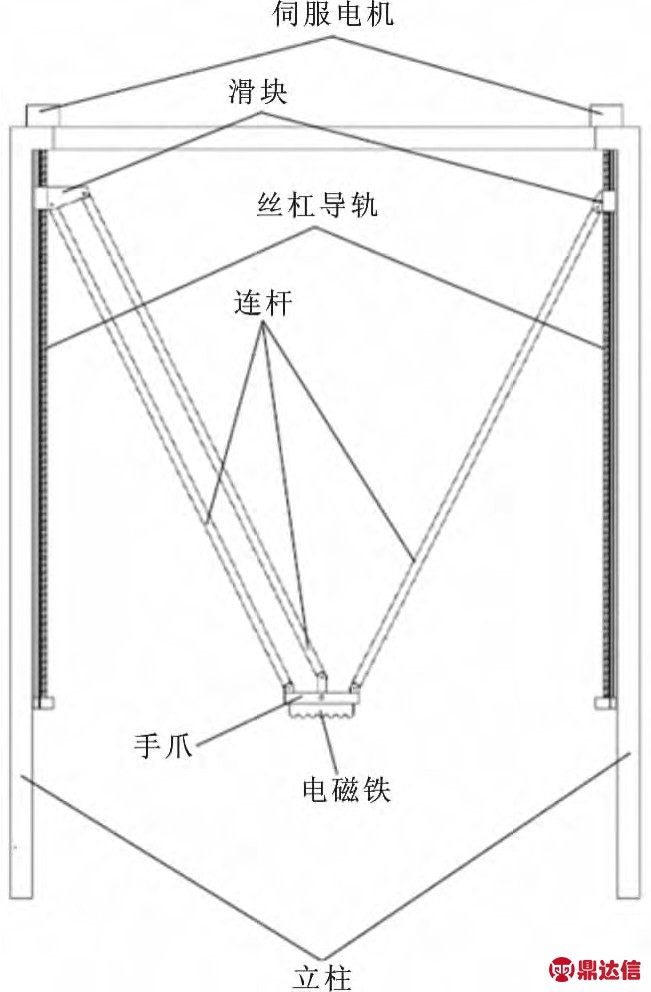
图1 角钢码垛机械手的机械结构简图
角钢码垛机械手由两个伺服电机通过丝杠控制末端手爪的运动。码垛机构的左边两个连杆等长,同时连杆与滑块连接点间距和与手爪连接点间距等长,因此,左边两个连杆、滑块、手爪构成了一个平行四边形。滑块保持水平在丝杠导轨上滑动,故手爪总能保持水平抓取。角钢生产线上,角钢一排排扣放向下水平传送到抓取位置,这就要求抓取装置必须总保持水平抓取[1]。该抓取装置符合角钢的生产工艺流程,同时也实现了角钢的顺利码垛。
2 角钢码垛机械手的运动学分析
机构的运动学是研究机构运动的几何关系,也是分析机构其他性能的基础。图1所示的角钢码垛机械手属于空间机器人,由于支链多,给运动学分析带来了困难。为此,依据几何投影学,将二自由度平移并联机器人等效成平面机构,可大大降低运动学分析的复杂性,如图2所示。
图2 角钢码垛机械手机构简图
根据实际情况设计角钢码垛机械手末端执行器的轨迹,如图3所示。
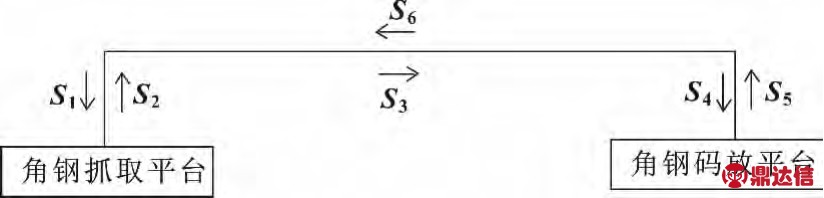
图3 末端执行器轨迹
根据角钢自动码垛机末端执行器的轨迹,将轨迹路线划分为六段。分别为S1=96 mm;S2=96 mm; S3=1 365 mm;S4=96 mm;S5=96 mm;S6=1 365 mm。同时对这六段的时间进行了规划。在码垛之前,需要等待时间 t0=1 s;S1段对应的运行时间为t01=0.5 s;S2段对应的运行时间为t12=0.5 s;S3段对应的运行时间为t23=2 s;因为S3段距离比较大,所以设计了匀速运行阶段。S3段匀加速运行时间为t231=0.25 s;S3段匀速运行时间为t232=1.5 s;S3段匀减速运行时间为t233=0.25 s;S4段对应的运行时间为t34=0.5 s;S5段对应的运行时间为t45=0.5 s; S6段对应的运行时间为t56=2 s;S6段匀加速运行时间为t561=0.25 s;S6段匀速运行时间为t562=1.5 s; S6段匀减速运行时间为t563=0.25 s。
根据速度和加速度公式,
可求得六段的位移、速度、加速度随时间的变化函数。
根据末端执行器的轨迹和位移随时间的变化,对H1和H2在丝杠上的位置变化进行分析和求解,如图2所示。
根据式(1)—(4),可求得
根据上面的计算和推导,用Matlab对其进行分析和求解,得到H1和H2随时间的变化如图4所示。

图4 H1和H2变化图
根据末端执行器的轨迹和位移随时间的变化,对H1和H2在丝杠上的速度变化进行分析和求解。
对H1进行速度雅可比求解,J1=jacobian(H1,[x,y]),
对H2进行速度雅可比求解,J2=jacobian(H2,[x,y]),
将H1和H2的速度雅可比进行合并,得
J= 对水平方向和竖直方向的速度进行合并,得v=[vx,vy]
对水平方向和竖直方向的速度进行合并,得v=[vx,vy]
根据上述所求可得,v1=J1×v,v2=J2×v,用Matlab对其进行分析和求解,得到v1和v2随时间的变化图如图5所示。
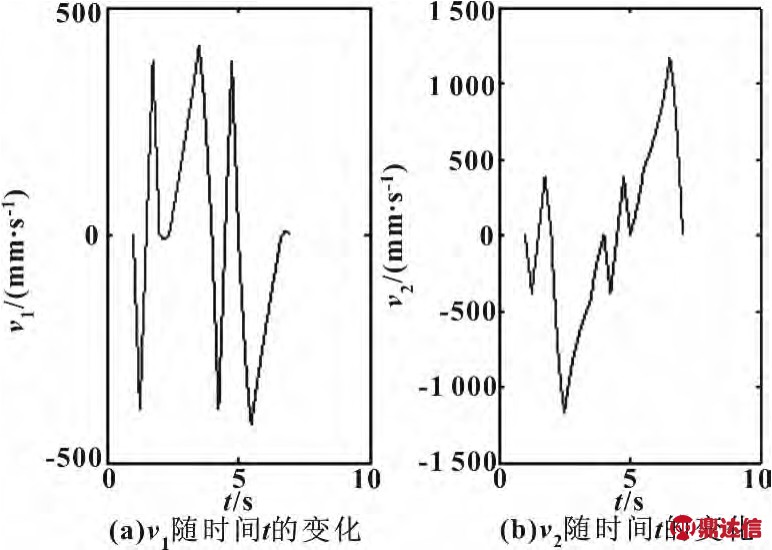
图5 v1和v2变化图
根据末端执行器的轨迹和位移随时间的变化,对H1和H2在丝杠上的加速度变化进行分析和求解。
对H1进行海森矩阵求解,Ha1=jacobian(J1,[x,y]),
对H2进行海森矩阵求解,Ha2=jacobian(J2,[x,y]),
根据上述所求可得,a1=v'Ha1v+J1a;a2=v'Ha2v +J2a,用Matlab对其进行分析和求解,得到a1和a2随时间的变化图如图6所示。
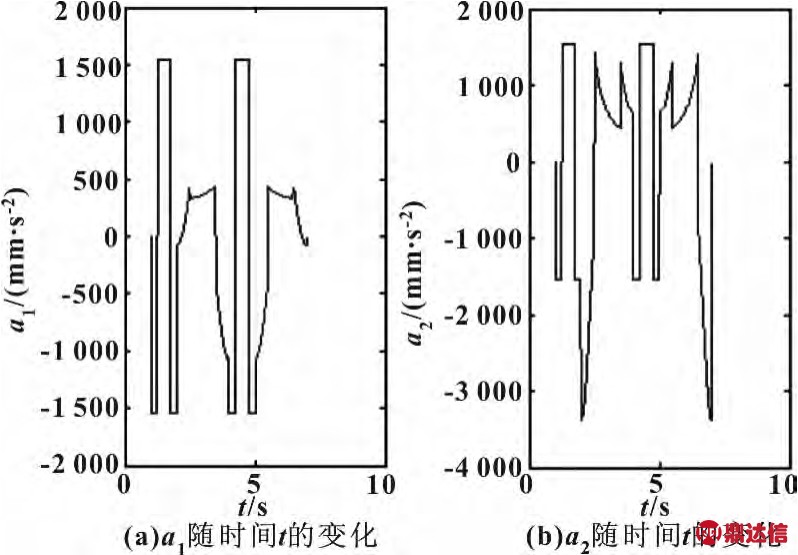
图6 a1和a2变化图
根据图4—6的分析可知,H1、H2的位移、速度、加速度都偏大,与实际状况有一定差距。为了降低H1、H2的位移、速度、加速度,下面对机构的导轨进行倾斜设计与优化。
3 角钢码垛机械手导轨倾斜机构的设计
如图7所示为导轨倾斜机构简图。
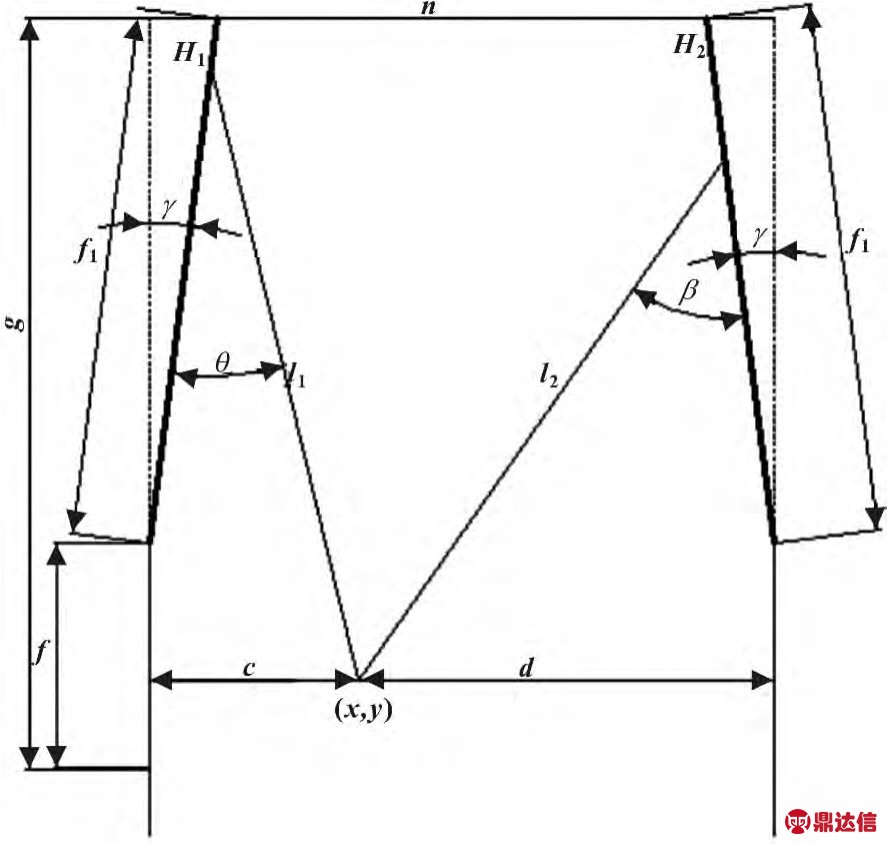
图7 导轨倾斜机构简图
根据末端执行器的轨迹和位移随时间的变化,对H1和H2在丝杠上的位置变化进行分析和求解,如图7所示。
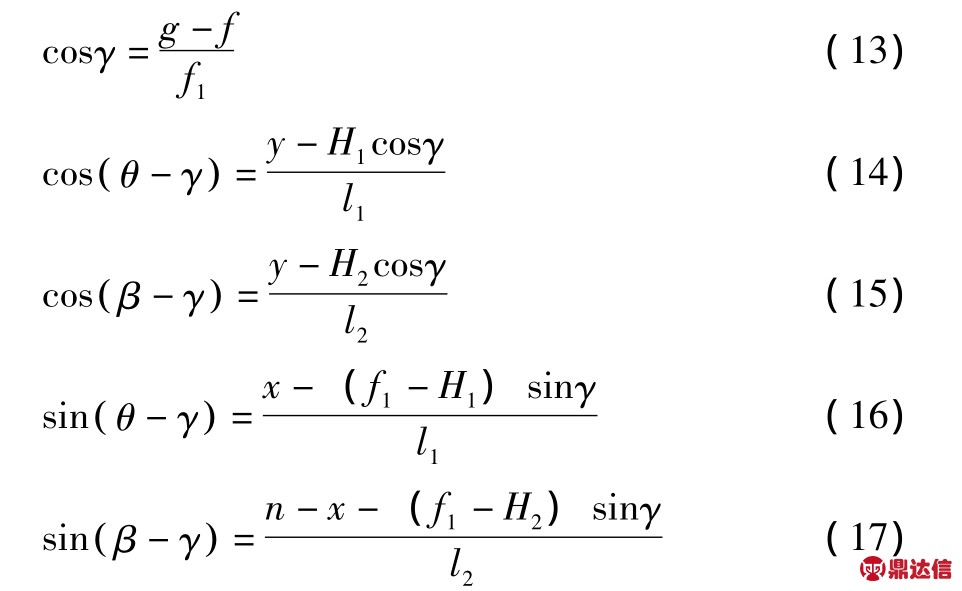
根据式 (13)—(17)和雅可比矩阵、海森矩阵,可求得 H1和 H2以及 v1、v2、a1、a2的表达式。
根据上面的计算和推导,用Matlab对其进行分析和求解,得到导轨倾斜角度γ和H1、H2、v1、v2、a1、a2的关系,如表1、2所示。
表1 γ和H1、H2的变化关系
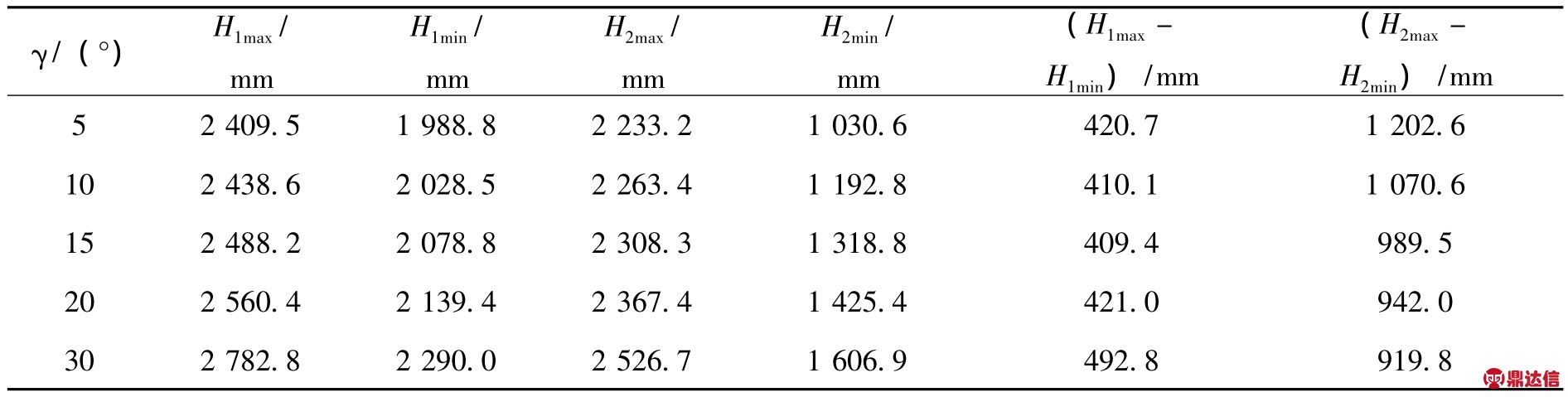
表2 γ和v1、v2、a1、a2的变化关系
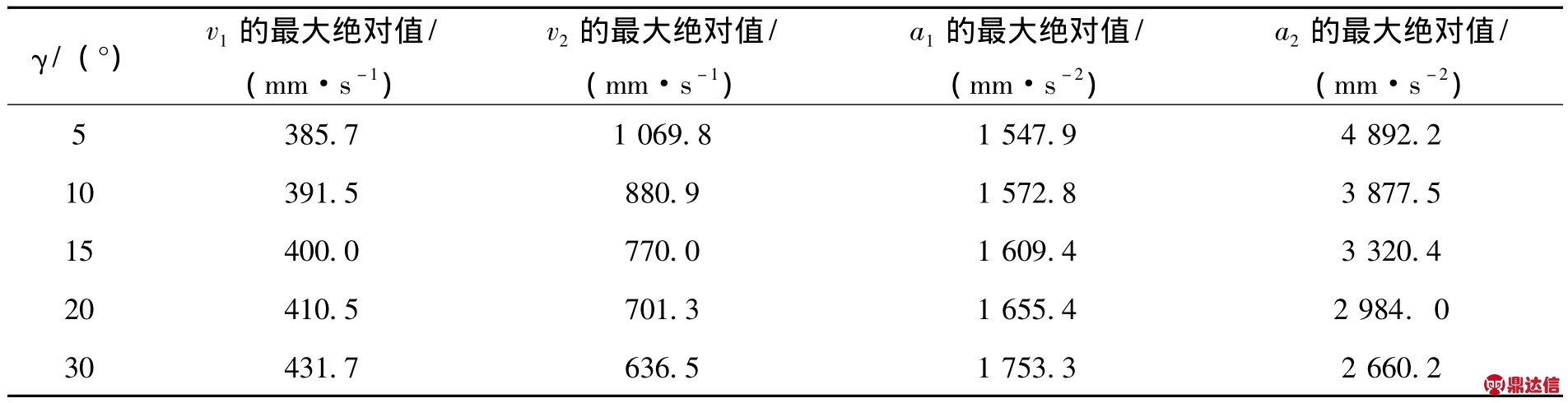
根据图4—6以及表1、表2的分析可知,当倾斜角度越大,H1和H2的位移差值以及速度、加速度的最大绝对值越小,机构的稳定性越强。但根据实际情况,角钢码垛机 (图6)中的g=3 000 mm,f=500 mm。综合上述分析,当γ=15°时为最优倾斜角度,其位移、速度、加速度对比图如图8、9所示。
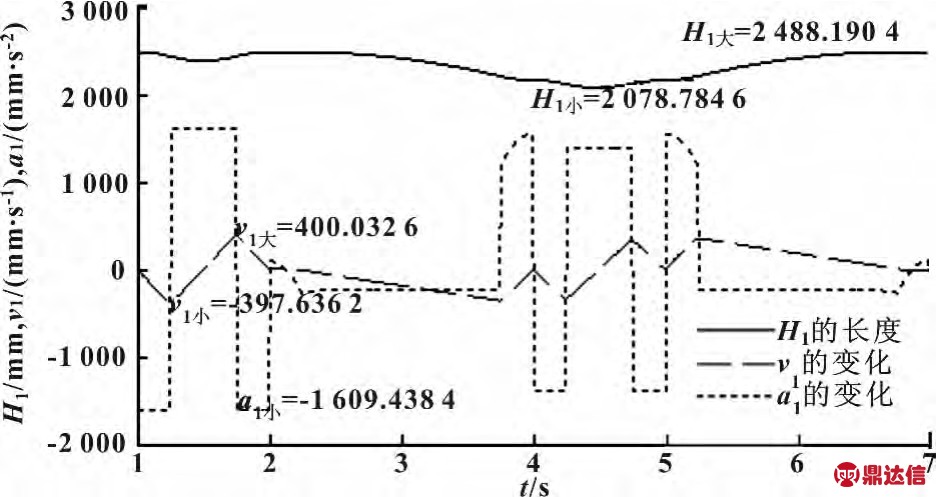
图8 H1的长度、速度、加速度对比图 (γ=15°)
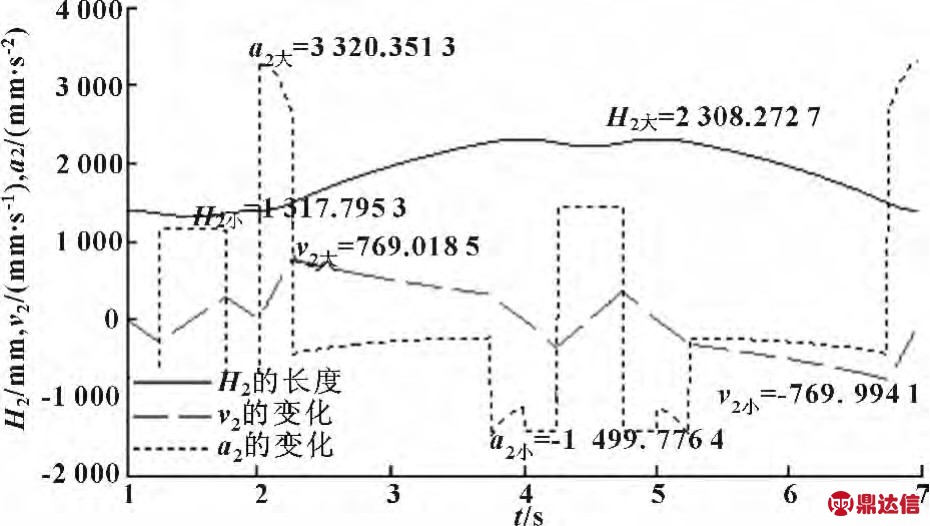
图9 H2的长度、速度、加速度对比图 (γ=15°)
4 结论
通过对角钢码垛机械手机构的优化,将码垛机械手导轨的倾斜角度γ由0°变为15°,码垛机械手H1和H2位移差值以及速度、加速度最大绝对值明显变小,减小了机械冲击和震动,提高了码垛机运行的平稳性,为角钢码垛机械手机构的优化提供了理论依据。


