
摘要:针对物流行业的搬运码放作业,文章设计了一种新型机器人机械结构,可使机器人码放货物更加准确、平稳,同时能够使机械臂实现轻量化,在同等条件下承载能力更强,提高了整机稳定性;运用解析几何法对该机器人的机构进行了详尽的运动学分析,给出了运动学正解方程,对空间位姿确定及后续的轨迹规划具有重要意义;运用SolidWorks及ADAMS对机器人进行了三维建模、运动轨迹规划和仿真分析,得到的曲线验证了数学推导的正确性,对后续机器人的控制系统设计意义重大。
关键词:码垛机器人;结构设计;运动学分析;ADAMS仿真曲线
0 引言
近年物流行业飞速发展,自动化程度不断提高,而物料搬运效率低下,难以满足生产的需求,因此,码垛机器人应运而生。码垛机器人是集机械、电子、信息、智能技术、计算机科学等学科于一体的高新机电产品[1],其在生产生活中的应用非常广泛[2-3]。
码垛机器人结构多种多样(如FANUC、ABB系列等),目前日本、德国、美国等发达国家的研究已取得一定成果,我国在这方面的研究起步不久,还需加快研究步伐。本文针对物流行业现状,对本体机械功能原理进行了创新,设计了一种新型码垛机器人。该结构中两个驱动装置分置机架上(图1中A、D处),整机重心下移,搬运性能更加灵活优越,本文对其运动学特性进行了详尽分析,得到一种简化的正运动学方程,并运用ADAMS对机器人进行了运动轨迹仿真,得到相关曲线,对进一步提高机器人综合性能具有重要意义。
1 码垛机器人的功能原理设计与尺寸综合
1.1 机器人机构类型的确定
本文设计的码垛机器人机构简图如图1所示,搬运一定尺寸的物流箱、具有固定形状的工业块状产品等,用末端执行器来夹住物流箱,进而通过主臂、前臂,后臂以及底座部的特殊四边形机构配合来搬运物流箱到一定位置,此过程中要求抓取精确,起落旋转平稳,对于这种工业需求,我们选择关节式结构形式,其无论在作业空间广度方面,还是在实现复杂的位移轨迹和姿态控制方面,都优于其它结构形式的机器人。搬运过程需要机器人的腕部始终水平,我们选择两个平行四边形机构和一个三运动副杆组机构来实现此动作。
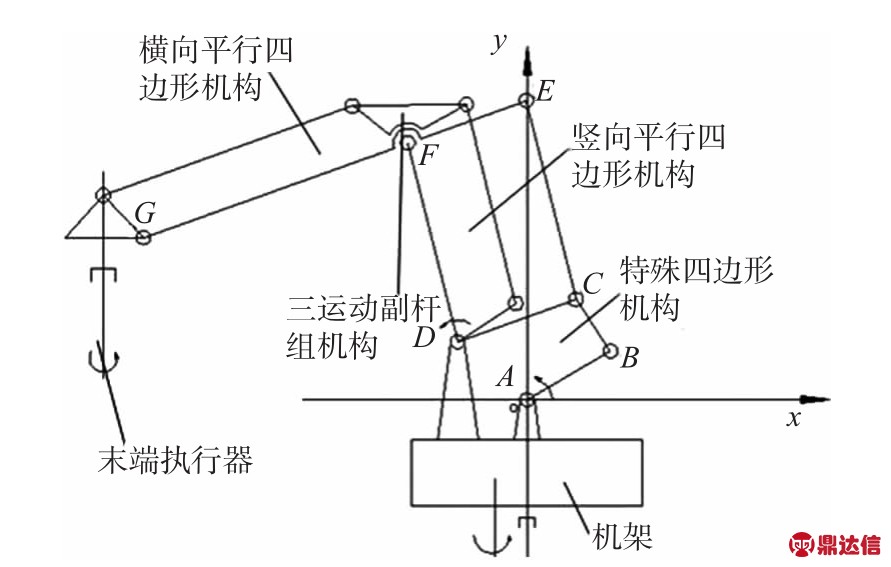
图1 码垛机器人机构简图
1.2 机器人具体结构设计与优点分析
设计要依据码垛物料的尺寸和重量、工作范围等技术参数来进行工作空间的规划和分析,得到该机器人各部件的结构尺寸。该新型机器人结构主要由主臂、前臂、后臂、手腕、三运动副杆组、辅助连杆以及底部连杆等组成(如图2)。其中机器人的动力由J1、J2、J3三个轴的电机驱动,电机通过减速器带动臂杆的转动,进而带动机器人手腕部分的运作,在此,机器人底部的连杆1、2、3以及机架构成了一个特殊四边形机构,设计该机构有以下优点:第一,电机带动减速器给予J2轴一定角度转动,通过该四边形机构传递到手腕部的运动更精准,对于手腕的准确定位具有十分重要作用;第二,可以调节整机质量的分布,使机器人的稳定性更好;第三,相比于电机上移的机器人可以减小臂部的重量,实现机械臂的轻量化;第四,通过该特殊四边形机构,可以增大承受的负载,即同样转矩情况下可以带动更大的负载。
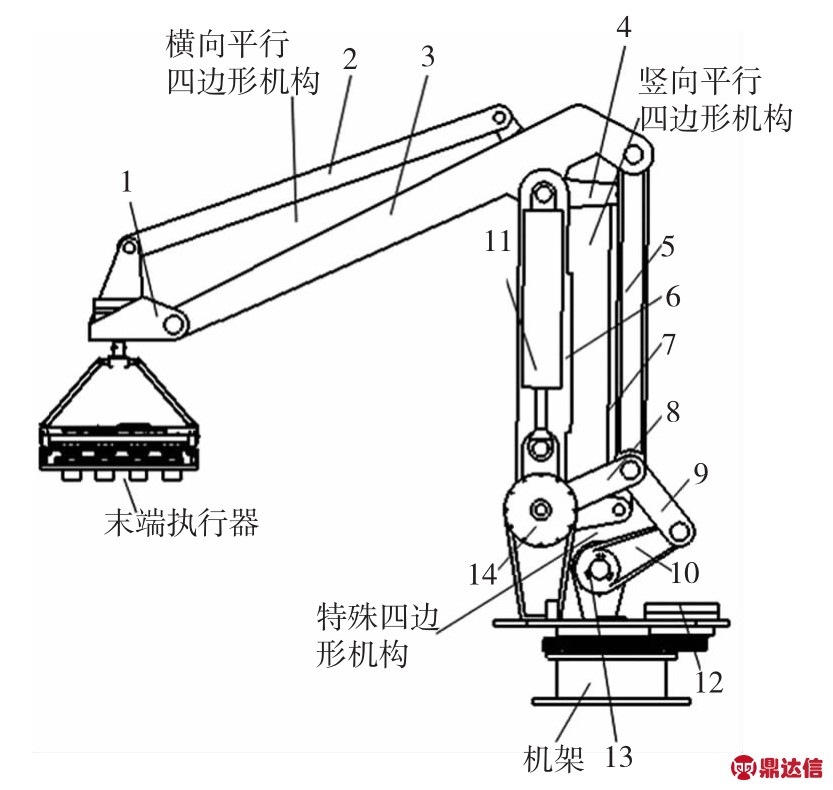
图2 码垛机器人机械结构示意图
1.手腕,2.辅助连杆1,3.主臂,4.三运动副杆组,5.后臂,6.前臂,7.辅助连杆2,8.连杆1,9.连杆2,10.连杆3,11.平衡弹簧,12.J1轴驱动,13.J2轴驱动,14.J3轴驱动
机器人动作时末端执行器必须保持水平,通过两个平行四边形辅助连杆机构[4]可以实现,具体通过计算,使竖向平行四边形一边固定在机架上,前臂的转动改变角度,同时结合主臂来使手腕位姿不变,即末端执行器始终水平。
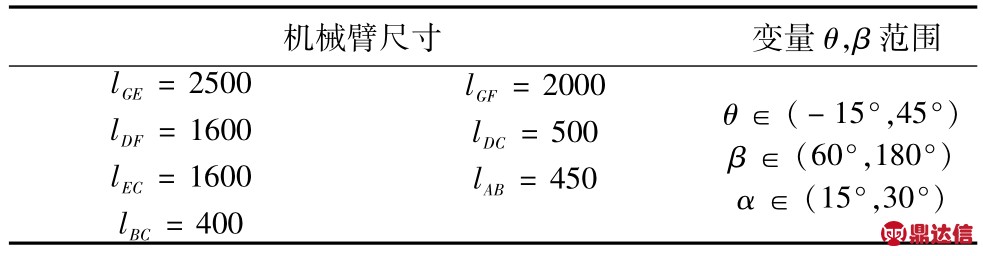
经过对工作工空间的分析[5],该新型机器人基本尺寸参数如表1所示。
表1 基本尺寸参数
2 码垛机器人的运动学分析
码垛机器人的运动学分析需要根据解析几何法建立坐标系,分析其运动学特性[6-8],计算出其末端执行器的位置和姿态与各参变量的关系,绘制出码垛机器人的运动学简图(如图3所示)。
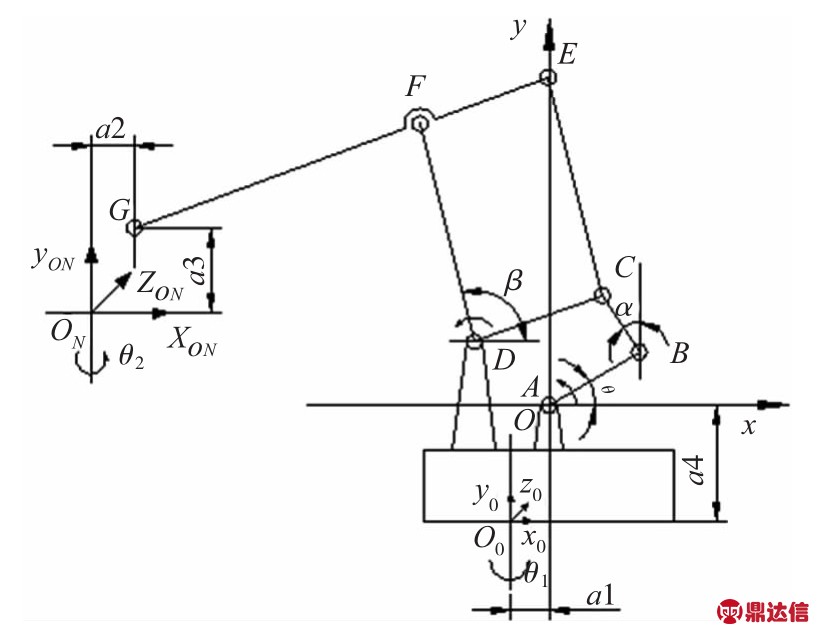
图3 码垛机器人机构运动学简图
2.1 机器人主要机构运动分析
设定一个固定坐标系O-xyz随机器人的回转机构一起绕机架回转,进而分析该坐标系中G点的运动规律,其中a1=-60,a2=280,a3=400,a4=260;
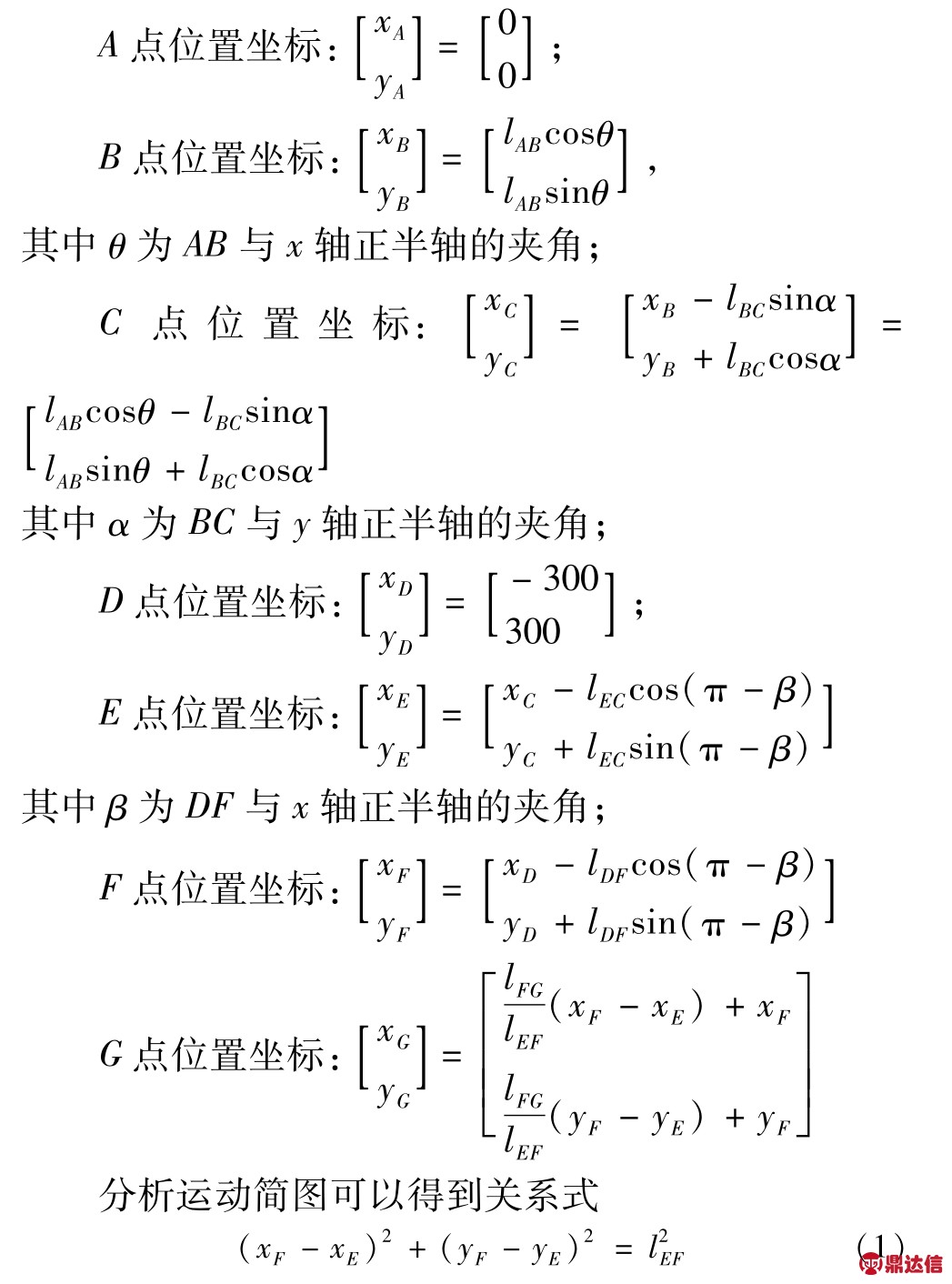
经分析可知,机器人末端G点的运动由θ和β共同决定,转角θ和β的相互配合变化可以使G点的水平和垂直位移发生相应的变化,达到预定的位置。
2.2 机器人位置解分析计算
将基坐标系O0-x0y0z0固定在机器人底座机架上不动,动坐标系O-xyz绕其转动,机器人末端执行器形心ON在动坐标系O-xyz中的坐标为:
通过齐次变换,可知ON在基坐标系O0-x0y0z0中坐标为:
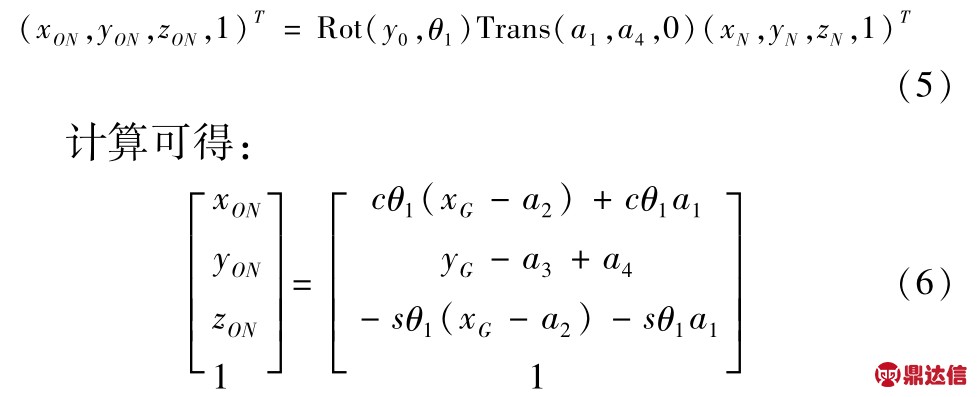
末端执行器的姿态变化为绕y0轴转动(θ1+θ2),则末端执行器的位置正解为:
该方程为码垛机器人的正运动学方程。
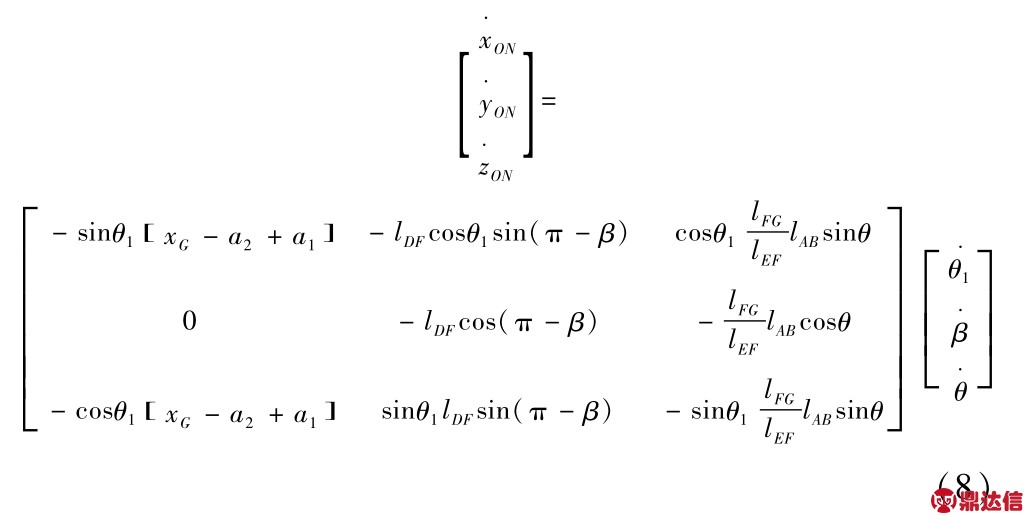
2.3 机器人末端执行器速度分析计算
对(6)式两边分别求导并整理成矩阵形式为:
式中:![]() 为机器人底座的转动角速度;
为机器人底座的转动角速度;![]() 为机器人J3轴转动角速度;
为机器人J3轴转动角速度;![]() 为机器人J2轴转动角速度;V为机器人末端在空间中的广义速度;J(m)为速度雅克比矩阵;
为机器人J2轴转动角速度;V为机器人末端在空间中的广义速度;J(m)为速度雅克比矩阵;![]() 为各关节驱动的角速度。
为各关节驱动的角速度。
式(8)即为码垛机器人的速度正解方程。
该运动学推导过程对机器人的轨迹规划以及机器人位姿的确定有十分重要意义。
3 机器人的运动轨迹规划及仿真分析
运用SolidWorks建立新型码垛机器人的三维模型(如图4所示)。将模型保存成(*.x-t)格式[9-10],再导入ADAMS中进行运动学分析。
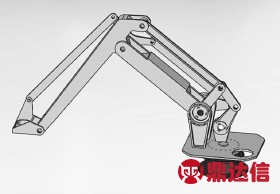
图4 码垛机器人三维模型
机器人的运动轨迹如图5所示,由起点A出发运动到点F,最后再回到点A。该运动轨迹通过以下STEP函数控制完成:
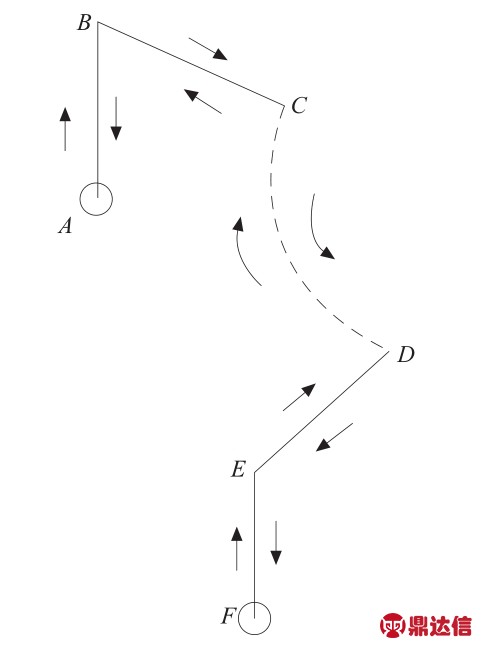
图5 机器人运动路径示意图
J1轴Motion(抓手竖直运动—AB、EF段):
step(time,0,0,4,0)+step(time,4,0,6,90d)+ step(time,16,0,18,-90d)
J2轴Motion(机械臂旋转—CD段):
step(time,0,0,2,50d)+step(time,8,0,10,-50d)+step(time,12,0,14,50d)
J3轴Motion(抓手水平运动—BC、ED段):
step(time,0,0,2,30d)+step(time,2,0,4,35d)+ step(time,6,0,8,-35d)+step(time,8,0,10,-30d)+ step(time,12,0,14,30d)+step(time,14,0,16,35d)+ step(time,18,0,20,-35d)
机器人的机架与地面锁定,底盘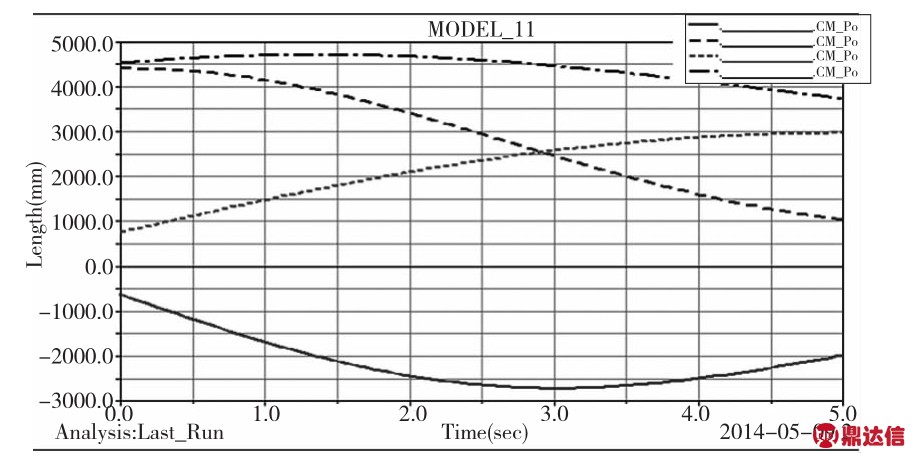
图6 末端执行器在x、y、z方向上的位移及合成仿真曲线
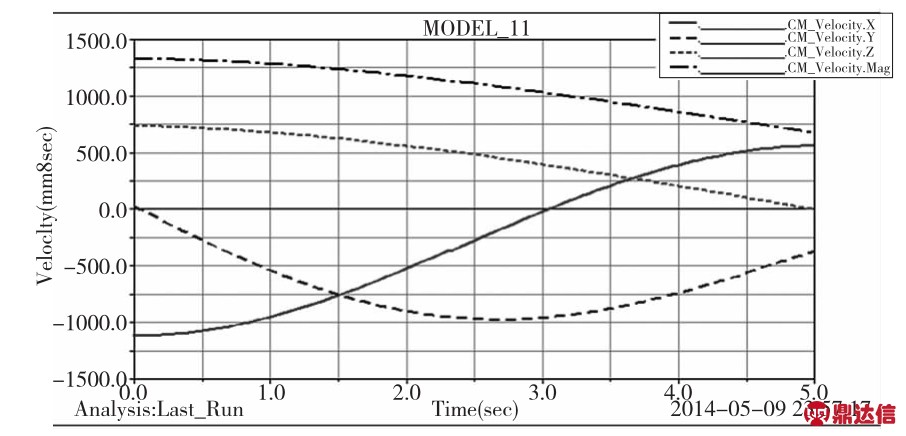
和机架之间添加回转副和回转转矩,在J2轴和J3轴(图2所示)分别添加驱动转矩,设定时间为5s,setps=100,末端执行器形心相对于基坐标的位移、速度、加速度仿真曲线分别如图6~图8所示。曲线的波动状态,贴近实际,反映了机器人关节转矩的变化情况,对后续关节电机控制意义重大。
图7 末端执行器在x、y、z方向上的速度及合成仿真曲线
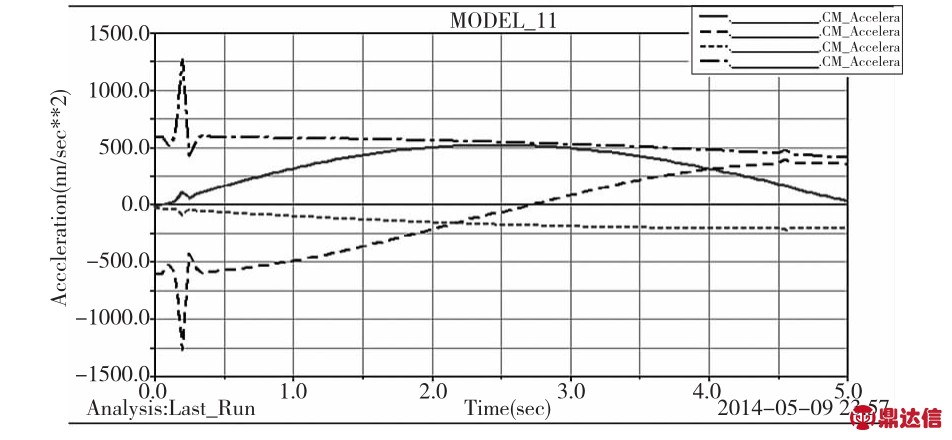
图8 末端执行器在x、y、z方向上的加速度及合成仿真曲线
在ADAMS/Post Processor中,可以测量运动过程中任意点的位移、速度、加速度。机器人运行2s时,可得θ=20°,β=45°,θ1=90°,可得末端执行器的位移分别为x=-2430mm,y=3413mm,z=2106mm,与仿真分析的结果一致,从而验证了数学推导的正确性,仿真曲线变化平稳,符合实际,反映了该码垛机器人的设计合理性。
4 结束语
本文设计的新型码垛机器人,其本体机械结构的创新使得末端执行器码放物料箱更加精准和稳定,可以调节整机质量的分布,相比于关节电机上移的机器人可以减小臂部的重量,实现机身轻量化;通过特殊四边形机构(图2所示),在基本参数相同情况下可以带动更大载重;通过对新型机器人进行详尽的运动学分析,得到运动学正解方程,对机器人的轨迹规划等具有重要意义;运用SolidWorks绘制出机器人简图,并导入ADAMS进行了轨迹仿真分析,得到了相应的仿真曲线,对比理论分析的数据,验证了理论推导的准确性,为该新型机器人的后续控制系统研究与分析奠定了基础。


