
摘要:针对原有码垛机器人性能缺陷,进行了硬件和软件的改造,通过对比原有传统四轴板控制系统和改造后小模块e-link控制系统工作方式、软硬件控制方式的区别,通过样机试验,验证改进后控制系统控制性能、工作效率、稳定性方面取得显著提高。
关键词:码垛机器人;硬件;软件;性能试验
我厂硫铵自动包装线产品由国产全自动码垛机完成码垛工作,该码垛机器人属四自由度柱面坐标机器人,柱面坐标机器人的空间位置机构主要由旋转基座、垂直移动和水平移动和水平移动轴构成,其动作空间成圆柱形。此码垛机器人有四个自由度,除旋转基座、垂直和水平移动外、还有前端段持器的旋转共四个自由度。在使用过程该码垛机运行平稳,但是码垛速度较自动包装速度稍慢,坐标更改较繁琐,人机界面友好度差,针对这些问题我们从控制系统硬件、软件两方面进行改造,以达到使用要求。
一、硬件系统改进
1.旧系统硬件系统
旧的码垛机器人控制系统运动控制节点板卡是多轴卡EtherMAC-4A 1,不需级联便能够实现多达4个电机的控制。
EtherMAC-4A 1控制器功能参数:
(1)基于工业以太网的多轴实时同步运动控制平台(Ether-MAC);
(2)控制轴数4轴,联动轴数最多4轴,可选一个轴作为主轴;
(3)输入24点(可扩展),输出6点(可扩展),输入点可接手摇脉冲发生器;
(4)支持伺服电机、步进电机,支持开环和半闭环控制;
(5)适合于3或4轴的自动化机械运动控制;
2.新系统硬件系统
新系统选用以太网单轴接口小模块e-link,使用了两个IO接口板和四个以太网单轴e-link接口板,其中e-link接口板使用50针接口与伺服驱动器相连,实现对驱动器的控制。
四个e-link接口板按照水平运动、竖直运动、底座旋转、手爪旋转的顺序分别连接到伺服电机驱动器的CN 1端口,通过CN1端口的信号实现对伺服电机位置模式的控制。e-link接口板的基本功能是接收计算机发出的控制指令并将指令转化为对电机的控制信号发送给伺服电机驱动器,同时接收伺服电机驱动器返回的伺服电机上面的编码器的数值、机械手的限位状态和零位传感器返回的信号来判断机械手的工作状态。
两个IO接口板均为8入8出控制板,用来接收托盘信号、入料信号、区域检测信号、复位信号等传感器的信号,并且输出控制信号,例如:控制气缸开合、报警等动作。两个IO接口板剩余的接口可以作为其他扩展信号的输入输出点,同时在输入输出点不足的情况下亦可以增加IO接口板来扩展输入输出点。
E-link标准伺服以太网控制系统是面向高性能同步实时以太网运动控制系统推出的最新产品,该产品基于EtherMAC实时以太网技术,保持了以往产品的优异性能,控制器无需任何专有硬件,无需实时操作系统,高实时性、高同步性、高灵活性。
3.新旧系统硬件比较
小模块e-link相比之前系统所用四轴板,由于可以采用IO板级联,组合更为灵活方便,能满足更大量的输入输出信号处理。且e-link通讯实时性能方面也有了很大提高,使得实时插补周期大幅缩短,由原来的4ms降为1ms,由此插补出的轨迹更为平滑流畅。
二、软件系统改进
新的软件系统的改进主要在以下几个方面:
1.能够实现单条流水线下的多种码垛方式的控制和双流水线下两条流水线分别码垛的控制方式。并且在编写程序的过程中考虑对流水线个数的扩展,能够轻易的添加新的流水线。
两个月后,乔振宇有个几年未见在外地供职的老同学携夫人来郑州旅游,乔振宇是个热情好客的人,立刻兴冲冲约了几个当年要好的老同学携夫人搞个家庭聚会。
3.用软实时操作系统Windows CE6.0替代了原来的非实时操作系统Windows Xp,实时性能有了显著提高,通讯周期由原有的4ms缩短为1ms。
4.通过改进轨迹规划算法,能够在负载50kg的情况下达到每小时600次以上的码垛效率,机械手运动过程中运动轨迹更为流畅,机械手稳定性更好,重复定位精度更高。
三、性能试验
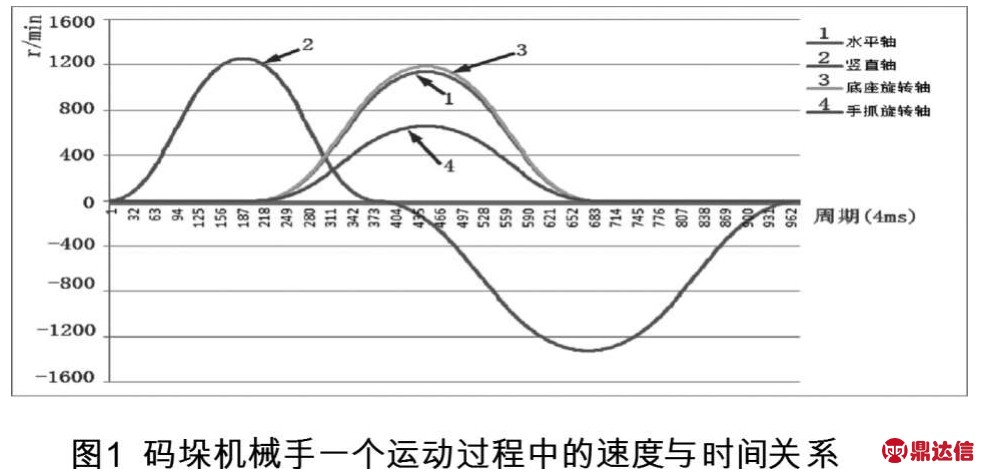
在机械手运行过程中,对机械手的一个从流水线到码垛点的运动过程进行了测试,测试结果如图1所示。其中,四个轴均是按照S曲线进行规划并运动的,整个运动过程各电机轴运动平稳、流畅,获得了良好的效果。上下运动轴在整个运动过程中有两个运动,分别是上升和下降过程。其他三个运动轴则分别只有一个运动过程。并且在运动过程中水平轴、底座旋转轴和手爪旋转轴三个运动是同步的,同时启动并且同时停止。而上下轴则与其他三个轴的运动有很大的重叠。
机械手在单条流水线码垛的情况下能够达到实际700袋/小时的码垛效率,而在双流水线码垛时,工作效率可以达到600袋/小时。能够满足机械手的要求。
另外,小模块可直接通过50pin的接头直安装在通用伺服驱动器上,省去了控制线并节省安装空间,减少连接环节,显著提高可靠性和稳定性。


