
摘 要:为实现龙门式多轴自动锁螺丝设备横梁的轻量化,结合BP神经网络与粒子群优化算法对其横梁进行结构优化。以横梁质量为目标函数,数个关键尺寸为设计变量,变形量及固有频率为约束条件建立数学模型。利用BP神经网络拟合设计变量与约束变量的映射关系,结合已建立的神经网络模型,应用基于Deb可行性规则改进的粒子群算法,在满足约束要求的条件下,寻求各关键尺寸的最优值。优化结果表明,优化后的横梁质量减少29.61%,实现横梁轻量化。
关键词:自动锁螺丝设备;横梁;结构优化;BP神经网络;粒子群算法
1 引言
螺丝锁付是产品装配过程中的重要工序,龙门式多轴自动锁螺丝设备专用于矩阵式排列短小螺丝的快节拍锁付,例如应用于电视背板灯条的锁付。快速的锁付节拍要求机构有良好的稳定性及灵活性。结构的刚度与固有频率是影响机构稳定性的重要因素,轻便的机构使机器具有更好的动态性能。
龙门横梁是影响整机运动稳定性的重要部件,当前横梁结构优化方法主要分为两大类:横梁板筋形状类型的优化及基于分析软件的尺寸优化。其中:周乐等对四种不同筋板结构的机床龙门横梁进行对比分析,确定O字型筋板具有最好的力学性能,并进一步对O字筋板进行分析,确定其最佳的尺寸参数范围[1],但其只针对四种常见结构进行比较,通用性较差;文献[2]对大型龙门数控机床横梁进行了六种主要工况的静力学分析,得出其仍有优化的空间;文献[3]对SIMP拓扑方法进行分析,并对龙门石材铣削中心龙门进行拓扑优化,实现了小幅度轻量化同时较大幅度的提高刚度;文献[4]对于尺寸变量较多的龙门铣床横梁进行尺寸灵敏度分析,确定最主要的影响参数后进行结构优化,取得了一定的效果。但这些优化方法都是针对横梁结构及工况相对复杂、设计变量较多的情况。龙门式多轴自动锁螺丝设备的横梁结构与薄板结构较为相似,且尺寸变量较少,为此引入一种新的优化方法,能更快更好地根据其结构特征进行结构优化。
该方法利用神经网络建立尺寸变量与最大变形量及一阶固有频率的映射关系[5-6],基于Deb可行性规则[7]改进粒子群算法,使粒子群算法具备处理约束优化问题的能力,并建立粒子群算法与神经网络的数据交互关系。以横梁质量为目标函数,以极限工况下最大变形量及一阶固有频率为约束条件,通过改进的粒子群算法进行寻优,求得各个关键尺寸的最优参数。
2 横梁结构分析
龙门式多轴自动锁螺丝设备主体三维结构,如图1所示。主要机构包括:底座、龙门、螺丝拧紧机构、送料机构等,其中龙门主要包括支座及横梁,且横梁上安装有上下运动模块,可带动螺丝锁紧机构上下运动。横梁在运动过程中,如图2所示。动力源部分与推杆连接提供推拉动力,竖直方向为主要承载方向,横梁两端与支座连接,结合横梁受力及其与其他部件的连接情况确定两侧采用X形板筋中间部分采用H形板筋。考虑到横梁承受的载荷较小,此处选用强度高、密度小的铝合金材料6061,结合工程经验确定边框板宽w1、H板板宽 w2、X板宽度 w3、底板厚度 w4、板筋厚度 w5等 5 个关键尺寸参数。主要材料性能及关键尺寸参数,如表1所示。
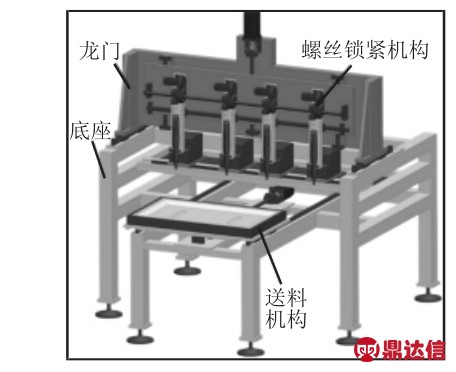
图1 龙门式多轴自动锁螺丝设备结构
Fig.1 Structure of Gantry Type Multi-Axis Automatic Locking Screw Device
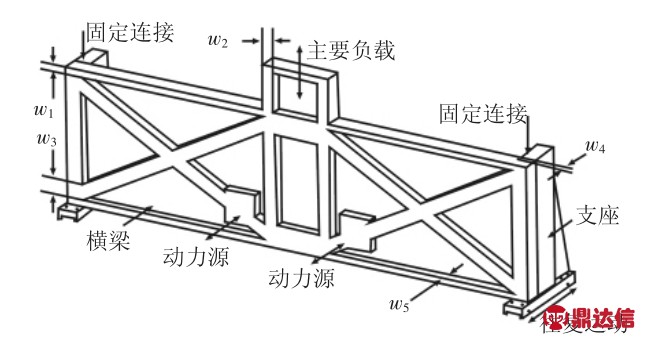
图2 龙门结构及受力情况
Fig.2 Structure and Force Condition of Gantry
表1 关键尺寸及材料性能
Tab.1 Critical Dimensions and Material Properties
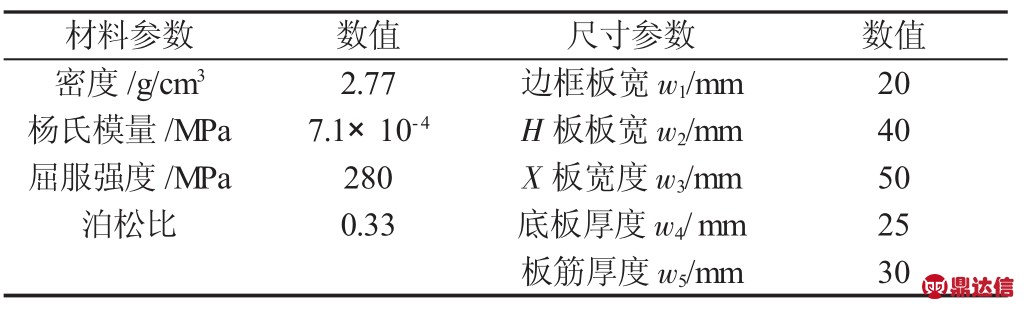
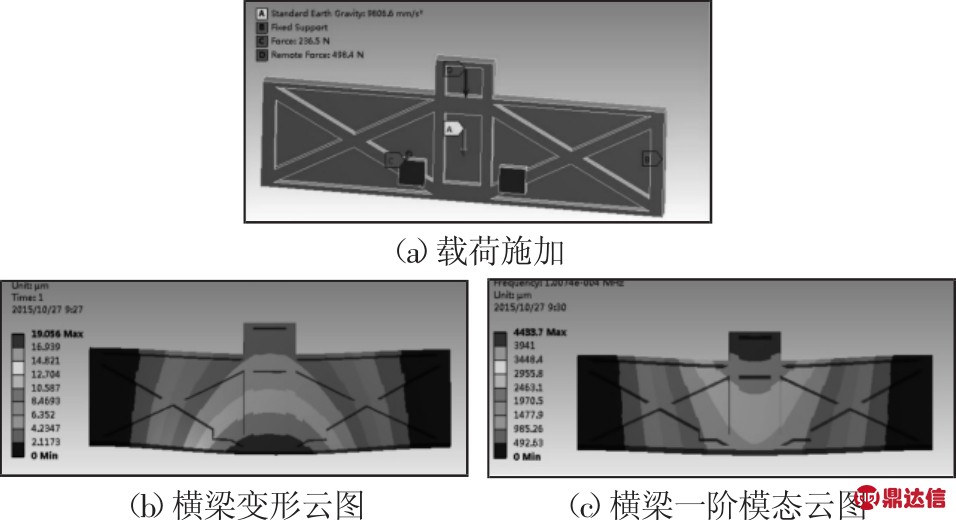
图3 横梁载荷、变形及一阶模态云图
Fig.3 Load,Deformation and 1st Mode Shape of Crossbeam
当横梁向前加速运动,上下运动模块同时向上加速运动时为其横梁变形量最大的时刻(即为极限工况),该工况下横梁所受的外力。龙门总质量为91.8kg,最大加速度为1.6m/s2,导轨摩擦系数为0.01,取安全系数为1.6,则前后动力源推力为236.5N;上下运动模块自重27.3kg,最大加速度为1.6m/s2,导轨摩擦系数为0.01,取安全系数为1.6,则极限工况的上下方向主要负载为498.4N;受力图,如图3(a)所示。变形与固有频率是影响龙横梁工作稳定性的重要参数。在极限工况下对横梁进行受力分析,横梁在极限工况下的变形云图,如图3(b)所示。横梁的变形均为弹性变形,其最大变形量约为19μm。根据弹性变形的定义可知,当外力消失后变形也随之消失,龙门运动到相应位置后有短暂的停顿,因此允许运动过程中存在小幅度弹性变形。一阶模态云图,如图3(c)所示。其一阶固有频率为100.74Hz,在正常工作状态下,安装于横梁上的电机转速范围为(400~1200)r/min,在此工况下出现共振的概率极小。综上分析,该设计较为保守,有一定的优化空间。
3 横梁的优化
3.1 数学模型的建立
根据上述分析,以横梁质量为目标函数,横梁5个关键尺寸作为变量对横梁进行结构优化设计,得出其优化数学模型:
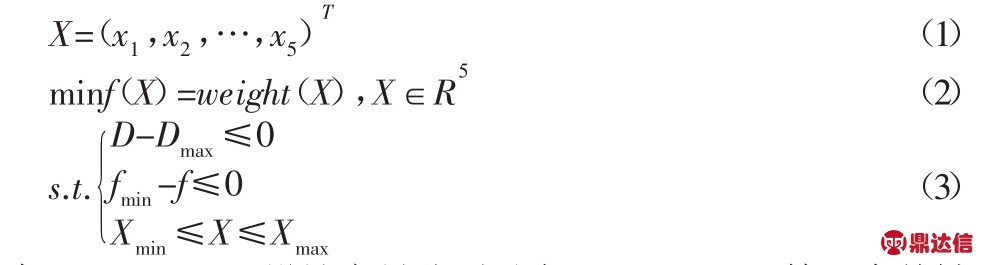
式中:x1,x2,…,x5—设计变量分别对应 w1,w2,…,w5等 5 个关键尺寸;式(1)为设计变量矩阵,式2为目标函数,是横梁的质量函数;式3为约束条件,包括最大变形量约束、一阶固有频率约束及设计变量取值范围。考虑到关键尺寸变量数量较少,所以在此略去变量灵敏度分析。
基于该机器的定位精度要求p=100μm,取允许最大变形量Dmax=P/ ≈70μm,最小一阶频率 fmin=100Hz;Xmax、Xmin分别为设计变量上下限,取 Xmin=(10,30,40,10,15);Xmax=(30,50,60,40,45)。
≈70μm,最小一阶频率 fmin=100Hz;Xmax、Xmin分别为设计变量上下限,取 Xmin=(10,30,40,10,15);Xmax=(30,50,60,40,45)。
3.2 拟合设计变量与约束变量映射关系
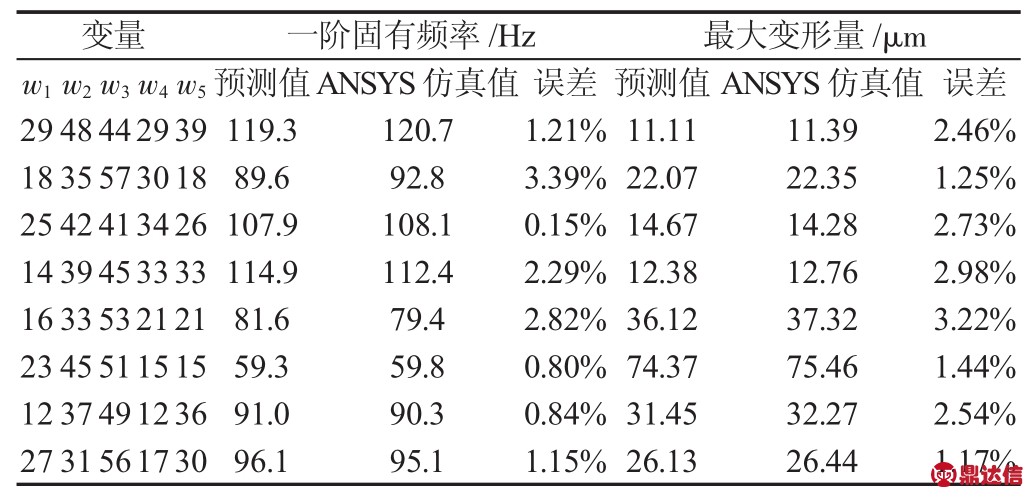
由于很难直接通过函数建立横梁关键尺寸与最大变形量及一阶固有频率的关系,这里采用BP神经网络来拟合该函数。采用含单个隐含层的神经网络,网络包括三层,分别为输入层、中间层、输出层。对于本设计,输入变量分别为:边框板宽w1,纵向板宽w2,X板宽度w3,底板厚度w4,板筋厚度w5等5个结构尺寸参数;输出变量为:最大变形量D及一阶固有频率f。根据以上的神经网络结构,结合大量的参数进行训练,从而建立关键尺寸与最大变形量及一阶固有频率的映射关系。随机选取的变量数据测试拟合结果,如表2所示。预测值为训练完成的神经网络预测获取,ANSYS仿真值则通过ANSYS软件计算获得。测试数据表明预测值与ANSYS仿真值的误差基本控制在4%以下,拟合效果较好,能有效拟合设计变量与约束变量的映射关系。完成设计变量与约束变量的映射关系的拟合之后,利用改进后的粒子群算法寻求设计变量的最优参数。
表2 BP神经网络预测结果
Tab.2 Predictions of the BP Neural Network
3.3 改进的粒子群算法
粒子群优化算法(PSO)是基于鸟群觅食行为特点而提出的更高效更快捷的优化算法,能有效地应用于求解结构优化问题[8-9]。文献[10]首次将惯性权重引入PSO。PSO与其他智能算法相似,都是针对于无约束优化问题开发的,利用PSO求解约束优化问题需对该算法进行一些改进,A.Rezaee Jordehi分析总结了PSO的约束处理方法[11],惩罚函数法和Deb可行性规则是常用的处理约束问题的方法,但是罚函数的参数确定较为困难。现基于Deb可行性规则,对粒子群算法进行改进以解决约束优化问题,并对其学习机制进行改进,使速度与位置的更新更为合理。速度及位置更新函数,如式(4)、式(5)所示:

式中:xi—粒子i的当前位置;vi—粒子i的当前速度,其维数等于优化问题的搜索空间维数;t—迭代次数; —粒子i的历史最优位置
—粒子i的历史最优位置 —种群中的最优位置;r1、r2—介于[0,1]之间相互独立的随机数;c1—认知学习因子;c2—社会学习因子;ω—惯性权重。ω′—随机扰动因子,是介于[0,1]之间的随机数,能有效的抑制可行性规则法的早熟收敛现象
—种群中的最优位置;r1、r2—介于[0,1]之间相互独立的随机数;c1—认知学习因子;c2—社会学习因子;ω—惯性权重。ω′—随机扰动因子,是介于[0,1]之间的随机数,能有效的抑制可行性规则法的早熟收敛现象 —第t次迭代的平均粒子速度。
—第t次迭代的平均粒子速度。
适应度值(fx)i指的是粒子xi的函数值,区别于标准粒子群算法只从适应度值大小对 进行更新
进行更新 根据以下规则进行更新:约束违反程度为一级比较对象,可行域内的粒子总优于可行域外的粒子,约束违反程度较小粒子总优于约束违反程度较大的粒子;适应度值(fx)i为二级比较对象,当粒子一级比较对象相同时,适应度值较小者为优。约束违反函数为
根据以下规则进行更新:约束违反程度为一级比较对象,可行域内的粒子总优于可行域外的粒子,约束违反程度较小粒子总优于约束违反程度较大的粒子;适应度值(fx)i为二级比较对象,当粒子一级比较对象相同时,适应度值较小者为优。约束违反函数为![]() 为约束条件,其中
为约束条件,其中![]()
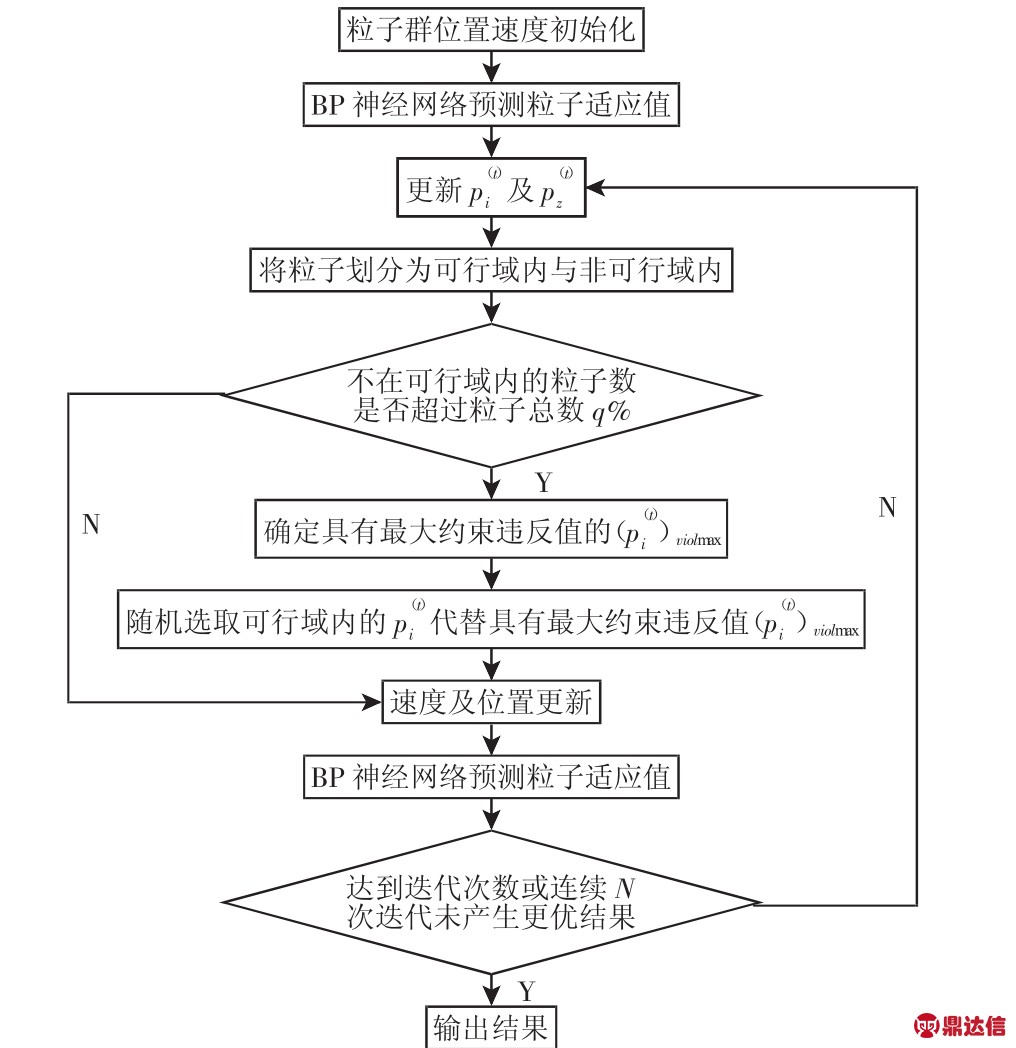
图4 优化流程图
Fig.4 Optimization Flow Chart
根据以上比较规则将会存在大量的不可行解,合理控制不可行解的比例能更好的搜索到最优解,当不在可行域的粒子数大于粒子总数的q%时(q为用户设定值),随机选取可行域内的 代替具有最大约束违反值的
代替具有最大约束违反值的 。
。
最后引入基于随非线性惯性权重改变的学习因子,改善算法的全局和局部搜索能力。使用的指数递减函数调整惯性权重策略[12]为![]() ,式中 ωmax=0.9,ωmin=0.4,T为最大迭代次数。使用的非线性函数调整学习因子策略为
,式中 ωmax=0.9,ωmin=0.4,T为最大迭代次数。使用的非线性函数调整学习因子策略为
3.4 横梁优化求解方案
在优化过程中,将改进PSO的粒子位置xi(既尺寸变量)输入神经网络模型获取对应的一阶固有频率及最大变形量,通过改进PSO的更新机制寻求满足一阶固有频率及最大变形量约束条件的最小横梁质量,其求解方案流程图,如图4所示。
3.5 优化结果分析
设定粒子个数为40;q=25;N=60;最大迭代次数T=4000,确定各参数后,根据图4的流程图对横梁进行优化,得到的优化结果,如表3所示。优化结果表明在保证一阶频率基本不变、最大变形量小量增加的前提下,横梁质量大幅减少29.61%,优化效果显著。
表3 优化结果数据
Tab.3 Optimization Results
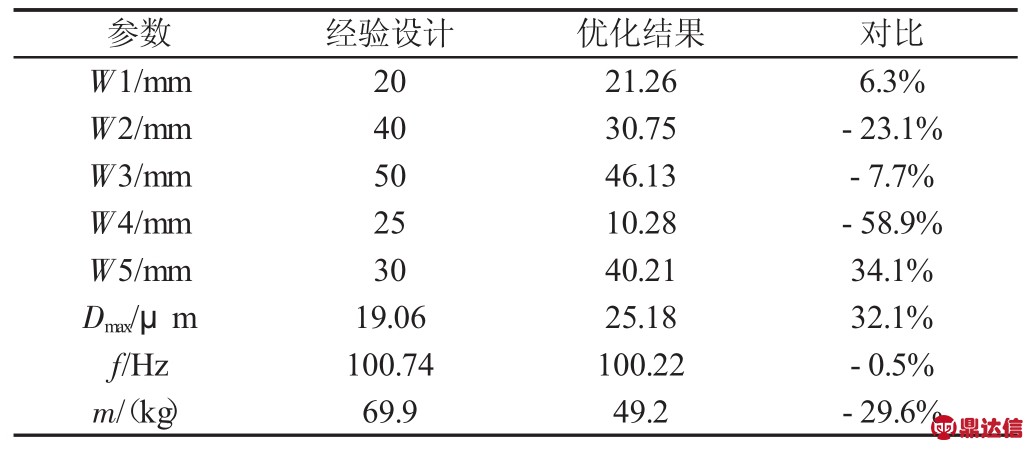
优化的结构尺寸参数采用ANSYS仿真的结果,如图5所示。其最大变形Dmax=25.921μm,一阶固有频f=101.3Hz,与优化的结果最大变形Dmax=25.18μm,一阶固有频f=100.22Hz非常接近,进一步验证的BP神经网络良好的预测效果及该优化方法的准确性。
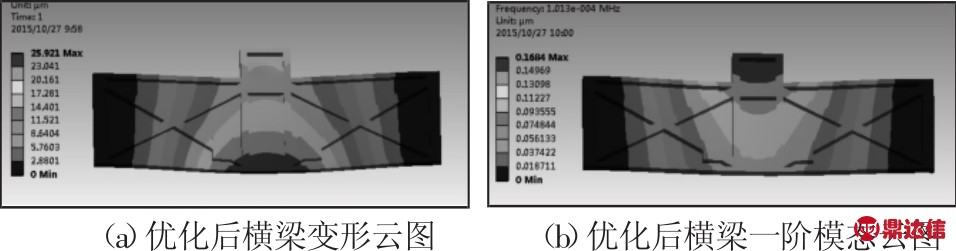
图5 优化后横梁变形与一阶模态云图
Fig.5 Deformation and 1st Mode Shape of Optimized Crossbeam
4 结论
以减少横梁质量为目标,以变形量及固有频率为约束条件,结合神经网络良好的映射拟合能力及粒子群算法简单快捷的寻优学习机制的优势,实现了龙门式多轴自动锁螺丝设备横梁结构轻量优化,该优化过程主要包括以下三项工作:(1)建立了包含单个隐含层的BP神经网络,结合大量的数据进行网络训练,拟合出尺寸设计变量与最大变形量及一阶固有频率的映射关系,预测误差基本控制在4%以内;(2)结合Deb可行性准则对粒子群优化算法进行改进,使其具有优化带约束问题的能力,并通过引入随机扰动因子改善早熟收敛现象;(3)建立神经网络与改进的PSO的数据交互关系,通过改进的PSO进行寻优。
最终在保证一阶频率基本不变、最大变形量小量增加的前提下,质量大幅减少29.61%,并通过ANSYS软件仿真,验证优化效果的可信度。


