
摘 要: 介绍了一种主动消声器的结构、消声过程、工作原理及主动吸声原理。该主动消声器的工作过程是通过主动吸声理论来实现的,在消声器的内壁敷设两层PVDF薄膜作为压电传感器,分别检测入射声波和反射声波;在传感器外敷设一层压电陶瓷作为作动器,并通过压电材料的压电性能来控制入射的声压信号,使其不再反射,以达到主动吸声的效果。用MATLAB软件进行仿真,验证了该理论的可行性。
关 键 词: 主动消声器;主动吸声;压电陶瓷;反射声波;压电传感器
消声器是一种允许气流通过但是限制声音通过或者传播的一种装置,是消除噪声的主要工具,按照工作机理可以分为阻性消声器、抗性消声器、阻抗复合消声器及有源消声器等。前3种消声器都是被动消声器,对于高频噪声的消声效果比较明显,而对于中低频噪声的消声效果较差。有源消声器的工作原理是由次级声源产生一个与初级声源幅值相等、相位相反的声波,使两者互相抵消,达到主动消声的目的[1]。这是一种主动消声的方法,由于产生的次级声源不一定与初级声源完全吻合,可能会产生再生噪声,增加噪声的强度,因此主动消声过程并不稳定,而主动吸声在消声器中的运用得到了人们的关注。
主动消声是通过声波的杨氏干涉理论得以实现的,而主动吸声与其有很大差别,主动吸声的控制目的是使得入射声波的反射系数很小以至于接近于零,吸声系数达到最大并接近于1,从而达到主动吸声的目的[2-4]。
对于主动吸声理论的研究,国外学者从20世纪80年代末开始关注[5-7]。他们提出在初级扬声器和次级扬声器之间加一个麦克风与加速度传感器,将麦克风和加速度传感器与声阻抗控制器连接,进行检测和控制,使得次级扬声器表面的声阻抗与空气中的声阻抗一致,达到主动吸声的目的。这种方法对低频噪声的控制效果还不错,但是对高频噪声的控制效果却很不理想。随后的学者都是基于此方法对主动吸声理论做进一步的研究。
1 主动消声器的结构设计
低频噪声对人们的身体和心理健康都会造成很大危害,因此对低频噪声进行衰减和控制已迫在眉睫。传统的有源消声器存在再生噪声及系统不稳定等问题。因此,本文提出了基于主动吸声原理的主动消声器设计。其结构如图1所示。
图1 主动消声器结构设计图
由图1可以看出,消声器的内壁上敷设了一层压电材料层(本文所选用的压电材料为压电陶瓷);在压电陶瓷表面敷设两层PVDF薄膜,作为压电传感器[8-9],用于检测入射声压和反射声压;在PVDF表层上敷设一层多孔吸声材料,作为被动吸声材料来吸收高频噪声。这样,用压电陶瓷来完成主动吸声工作,而吸声材料完成被动吸声工作,整个系统对低、中、高频噪声有非常好的控制作用。
2 主动吸声的设想
根据力与力的互相作用关系,假如有两个人在打乒乓球,一方将球发出,另一方准备接球,并给球一个与其运动相反的力,乒乓球就会立刻静止后反弹回去,而如果接球的另一方与乒乓球运动方向相同且二者相对静止,则不再反弹。同样的道理可用在主动吸声的原理上。把声波质点看成乒乓球,当其将要接触到压电材料时,给其一个类似的作用力,那么声波将不再反射,达到了主动吸声的目的。主动吸声系统可简化为图2所示的装置。
图2 吸声系统简化装置
设质量块的质量为m,弹簧的弹性系数为K,声波的入射频率为ω,扬声器与质量块之间的距离为l,则该振动系统的方程为:

(1)
式中,x0为质量块的初始状态。假设x0=0,v0为质量块的初始速度,ωn为质量块的固有频率![]() 则质量块的振动速度:
则质量块的振动速度:
x′(t)=v0cos(ωnt)
(2)
当声波质点运动到质量块表面时,根据声波的边界条件可得声波质点的速度:

(3)
式中:c为声波在空气中的传播速度;j是虚数的单位,并定义j2=-1。根据主动吸声原理,式(2)与式(3)相等,即可以得到:
(4)
假设质量块m=0.8 kg,l=1 m,c=340 m/s,则经MATLAB仿真,声波的入射频率f分别为500 Hz、1 000 Hz、2 000 Hz时,弹簧弹性系数的变化情况如图3所示。
从图3可以看出,弹簧的弹性和时间的关系与主动吸声原理的思想相匹配。
3 对入射声压与反射声压的检测
本文采用数字声场延时分离的方法,通过压电传感器来检测入射声压和反射声压。其检测原理如图4所示。
假设入射声波为平面声波,则入射声压和反射声压可分别表示为:
pi(x,t)=Aej(ω t-kx)
(5)
pr(x,t)=Bej(ω t+kx)
(6)
式中:A和B由声学边界条件所决定;k为声波的波数。由压电传感器PVDF1和压电传感器PVDF2分别检测到的电压信号为:
U1(t)=Ui(0,t)+Ur(0,t)
(7)
U2(t)=Ui(d,t)+Ur(d,t)=
Ui(0,t+τ)+Ur(0,t-τ)
(8)
式中![]() 为延时的时间;d为两个压电传感器之间的距离。如果将U1(t)和U2(t)通过图4的延时分离,则可得到:
为延时的时间;d为两个压电传感器之间的距离。如果将U1(t)和U2(t)通过图4的延时分离,则可得到:

(9)

(10)
图3 弹簧的弹性系数随时间的变化
图4 检测入射声压和反射声压的原理图
假设图4中两个压电传感器的灵敏度相同并可用S来表示,则有公式U=SP[10]。由该公式变换可得:
(11)
(12)
式中,pi、pr分别为入射声压和反射声压。根据式(11)、式(12)能够得到入射声压与反射声压,并可得到压电材料表面的吸声系数:
(13)
式中,R为散射系数。
4 基于压电材料的主动吸声
压电陶瓷具有良好的压电性能,且耐酸,稳定性好,常被作为作动器使用。本文选用的压电陶瓷为PZT-5。由压电陶瓷的声电类比和正逆压电效应可知压电材料极化后的结构(见图5)[11]。
图5 压电材料极化后的结构图
图5中:D表示压电材料的厚度;F1和F2分别为加在压电材料厚度方向的外力;v1和v2为压电材料厚度方向上的振动速度;U为压电效应产生的电压。由图5可以看出,极化的方向是垂直于z方向的。根据极化的压电材料可得到压电材料的声电类比图(见图6)。
图6 声电类比图
图6中![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;A为压电材料极化表面的面积;ρl为压电材料的密度;cD为恒定电位移下的弹性模量;εs为压电材料的介电常数;g为压电系数。由电路分析可知,各参量之间的关系为:
;A为压电材料极化表面的面积;ρl为压电材料的密度;cD为恒定电位移下的弹性模量;εs为压电材料的介电常数;g为压电系数。由电路分析可知,各参量之间的关系为:

(14)
根据声学边界条件可知![]()
![]() 其中:Z1为空气的声阻抗;pt为
其中:Z1为空气的声阻抗;pt为
透射声压。将这些公式代入式(14),可得到5个未知量,即pi、pr、pt、I、U。这些未知量之间的关系为:
(15)
如上所述,要实现主动吸声就得使反射声压为零,即声压入射到主动消声器中以后不再反射,反射声压pr=0。由式(15)可以得到:
(16)
本文所使用的压电材料为压电陶瓷PZT-5。其参数为:材料密度ρl=5 400 kg/m3,介电常数εs=1 200;恒定电位移下的弹性模量cD=11.6×1010 N/m2,压电材料的压电系数g=14.3×10-3 m/V,所选的压电材料面积A=0.804 m2。空气的密度ρ=1.21 kg/m3,声波在空气中的传播速度c=340 m/s。假设pi=1.0 Pa,用MATLAB对其进行仿真,观察在不同厚度下随着频率的变化,电压幅值和电压相位的变化情况(见图7)。
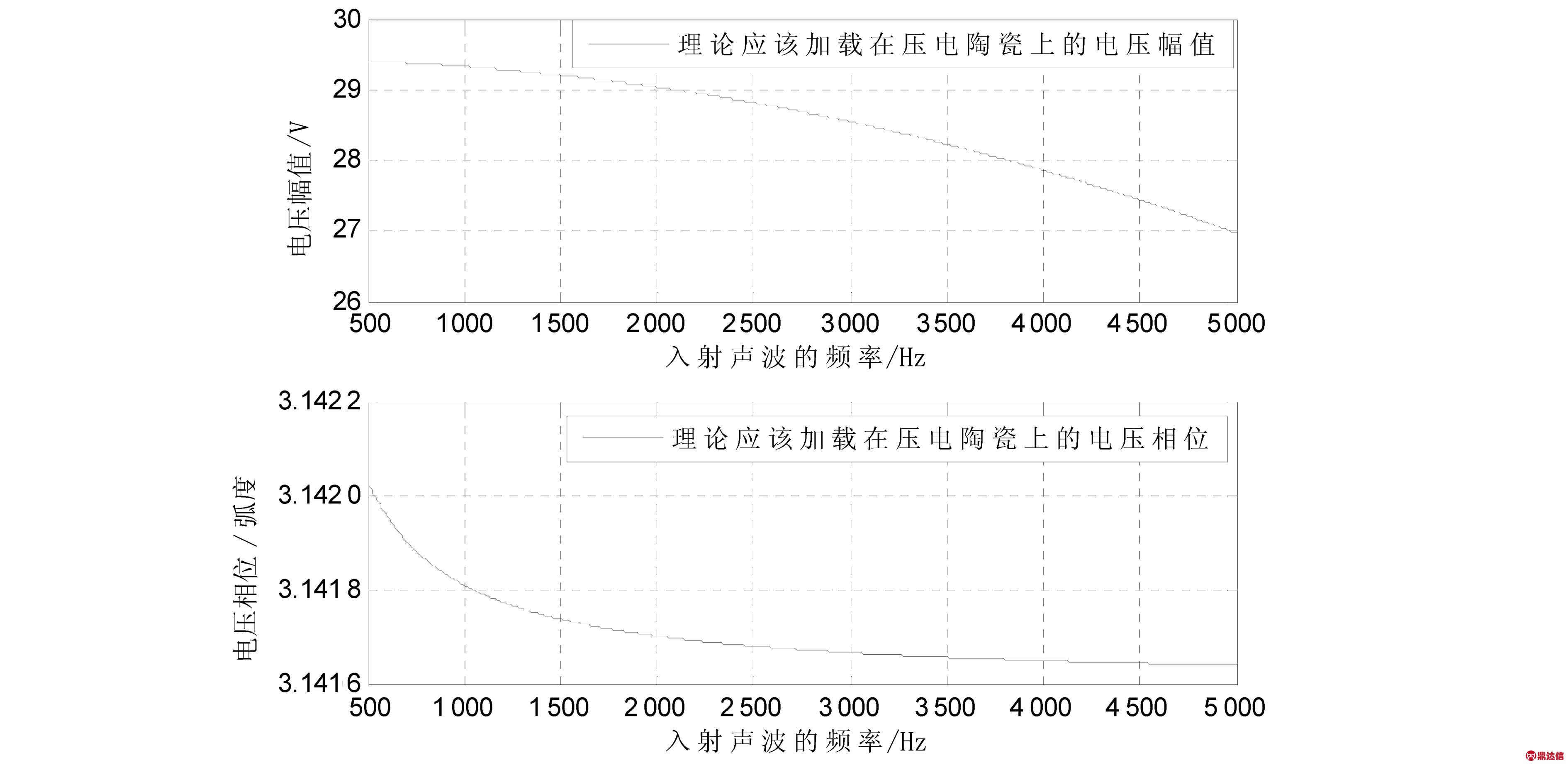
(a)压电陶瓷厚度D=1 mm时
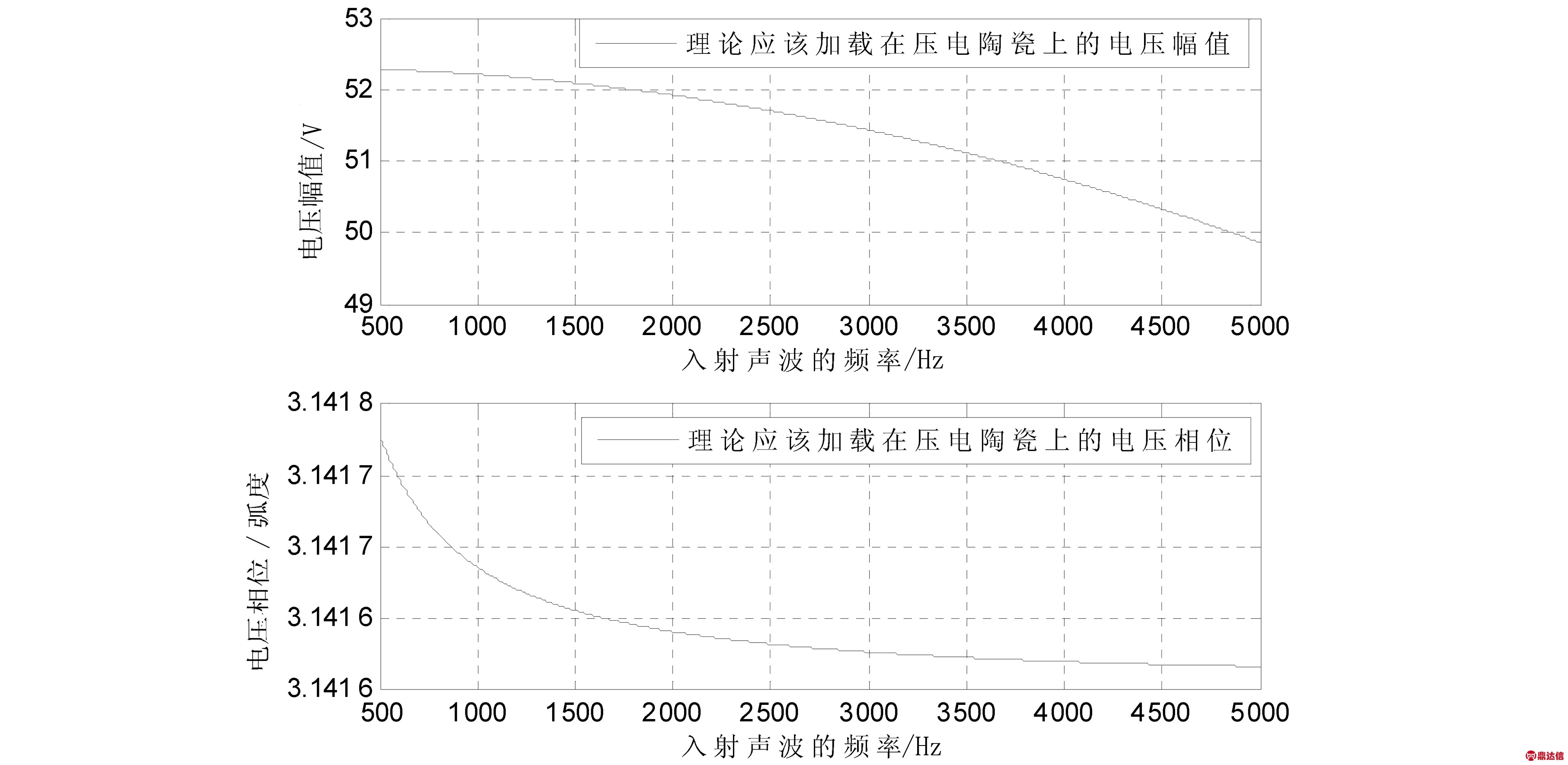
(b)压电陶瓷厚度D=2 mm时
(c)压电陶瓷厚度D=3 mm时
图7 压电陶瓷在不同厚度下电压幅值和电压相位与入射声波频率的关系
由图7可以看出,当压电材料厚度超过3 mm时,电压幅值将会超过100 V,在能达到效果的前提下,从安全和成本方面考虑,应该选取压电材料厚度小于3 mm的材料。
5 结 语
本文介绍了一种主动消声器的设计思路,用MATLAB进行仿真,得到了与预想一致的结果。介绍了声波检测方法,对加载在压电材料上的电压进行了分析,同样用MATLAB进行了仿真。结果表明,该主动消声器的主动吸声原理可行。


