
摘要:气浮导轨具有高运行精度、高平稳性的一个重要因素在于气体具有误差均化作用。为了探究误差均化作用的大小,通过多个不同波长的正弦函数来模拟导轨轮廓误差,建立平面气浮导轨物理模型,采用有限差分的数值计算方法求出动气浮导轨在运动过程中的各个平衡位置参数,进而利用最小包容法求出其运行直线度。结果表明:气体润滑很好地实现了气浮导轨误差均化作用,且效果明显;与无气体润滑状态时相比,气浮导轨在通气状态时的运行直线度提高了约一倍,与静导轨轮廓误差相比提高了约2/3。建立的气体误差均化效应计算方法为探究误差均化的影响因素奠定了理论基础。
关键词:平面气浮导轨;误差均化;直线度;轮廓
近年来随着电子技术、宇航、生物工程等的迅速发展,对机械零件的加工提出了更高的要求,机械零件的加工趋于复杂化、精密化。为了保证使用中的精确性与稳定性,越来越多的零件须对其表面参数进行精确测量[1],而气浮导轨因具有高精密运行的特点,已被广泛应用于测量这些机械零件的超精密仪器中[2]。为了进一步提高仪器测量精度,经研究发现气浮的误差均化作用对精度有重要影响。目前对气体的误差均化作用的认识还仅停留在感官上,并没有从理论上去研究计算出误差均化作用的具体定量效果。
图1所示为一类共基面并联机构气浮导轨,此类气浮导轨在精密超精密测量仪器中广泛应用,其运动原理为:在X、Y2个方向上施加驱动力,动导轨可以在静导轨上表面实现X、Y方向上的平动。
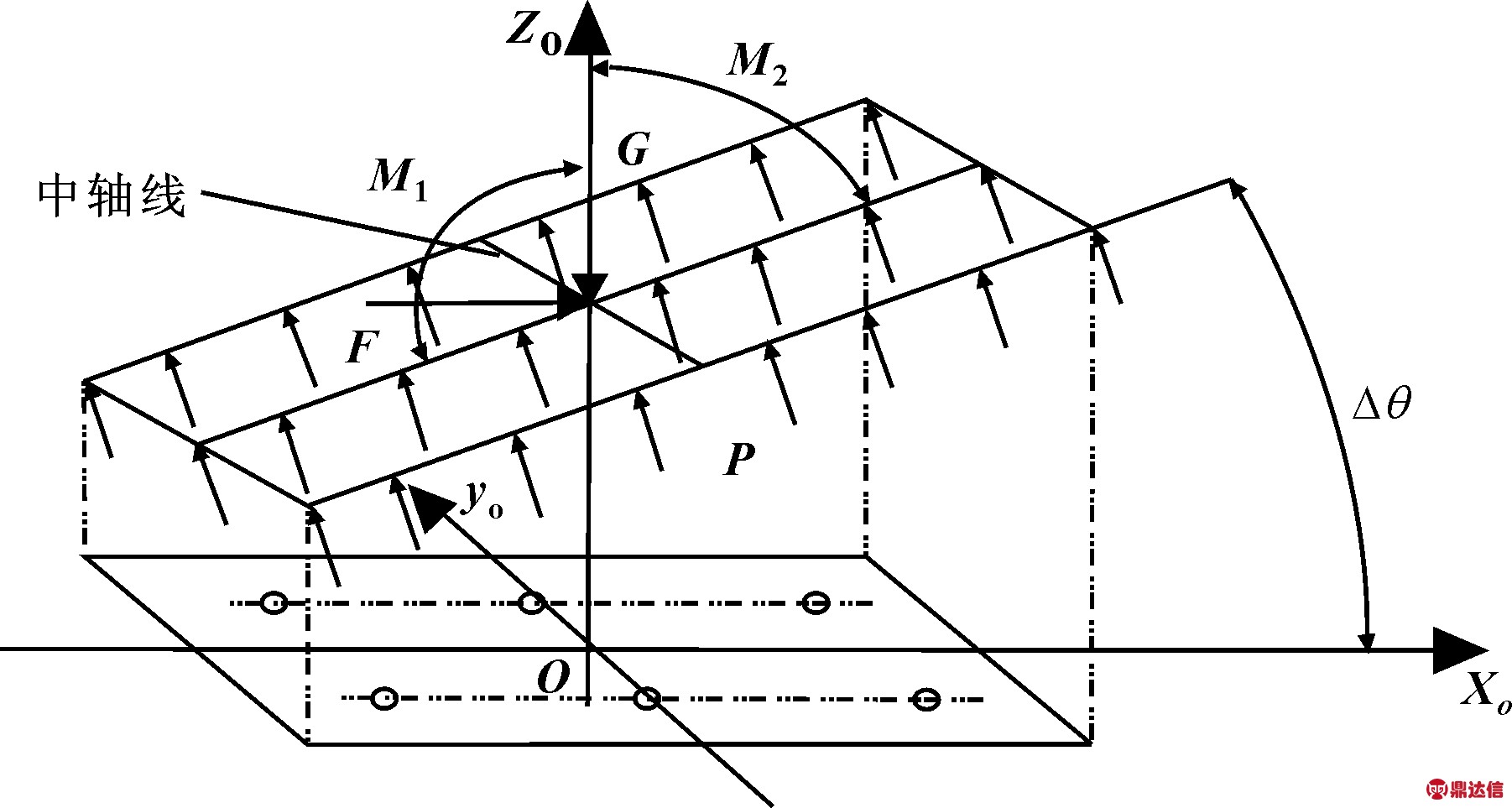
图1 气浮导轨运动原理图
Fig 1 Movement principle of air bearing guide rail
本文作者基于此类运动导轨,通过轮廓误差曲面拟合、控制方程推导及有限差分等方法对误差均化效应进行数值计算,定量探究误差均化效应大小,为进一步提高精密超精密仪器精度奠定理论基础。
1 流体数学模型
1.1 控制方程
Reynolds方程是整个气浮轴承润滑力学的核心,也是流体动力学研究的基础,从数学观点来看,流体润滑的基本内容均是求解 Reynolds 方程以揭示流体润滑膜中压力的分布规律,轴承间隙内气体压力的分布状况能左右轴承的性能[3-4]。Reynolds 方程的推导是基于纳维-斯托克斯流体( Navier-stokes) 运动方程,考虑润滑层内流动的边界层特点和流动的连续性,以及气体所满足的状态方程,经过较繁琐的数学推导得出。本文作者研究的是平面气浮导轨(即矩形止推气浮轴承,动导轨如图2所示),其在直角坐标系下的雷诺方程的一般形式为


(1)
式中:x为横向坐标;y为纵向坐标;p为气膜压力;h为动导轨与静导轨间的气膜间隙;μ为气膜黏度系数;u1、v1、u2、v2为相对运动速度;t为时间。

图2 动导轨物理模型
Fig 2 Moving guide rail physical model
本文作者所研究平面气浮导轨误差均化作用是在低速状态下进行的,系统为定常状态,故轴承之间的相对滑动速度与气体流速相比很小,可以忽略不计,故u1=v1=0,u2=v2=0,简化后的雷诺方程形式为

(2)
1.2 气体流量平衡条件
根据流体润滑理论可以得到通过每个固有节流孔的供气孔进入轴承表面的气体流量Qin为
(3)
其中:
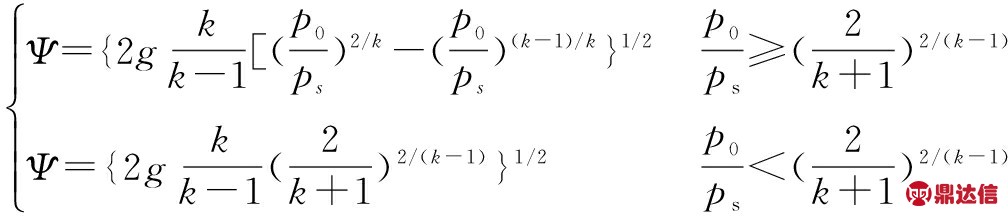
式中:ψ为喷嘴的流出速度系数;d为供气孔小孔直径;c0为喷嘴的流量系数;k为绝热指数;R为气体常数;ps为供气压力;p0为节流孔出口压力;T0为温度。
同样由气体润滑理论可以得出,当环境压力为pa、温度为T0、气体密度为ρ时,则由动导轨边缘流出的气体流量Qout为区域四周压力的积分和:

(4)
给出初始节流孔出气压力值,根据质量守恒连续条件,将整个气膜区域分为6个小区域,且使每个小区域自身的气体流进与流出量相等(见式5),从而满足整个气膜大区域总气体流进量流出量相等(见图3)。根据式(3)、(4)可以建立起流量平衡方程。
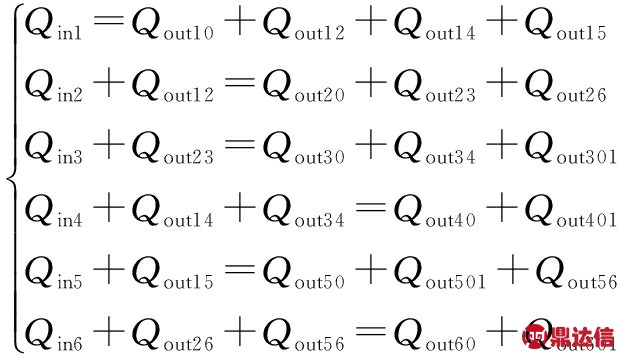
(5)
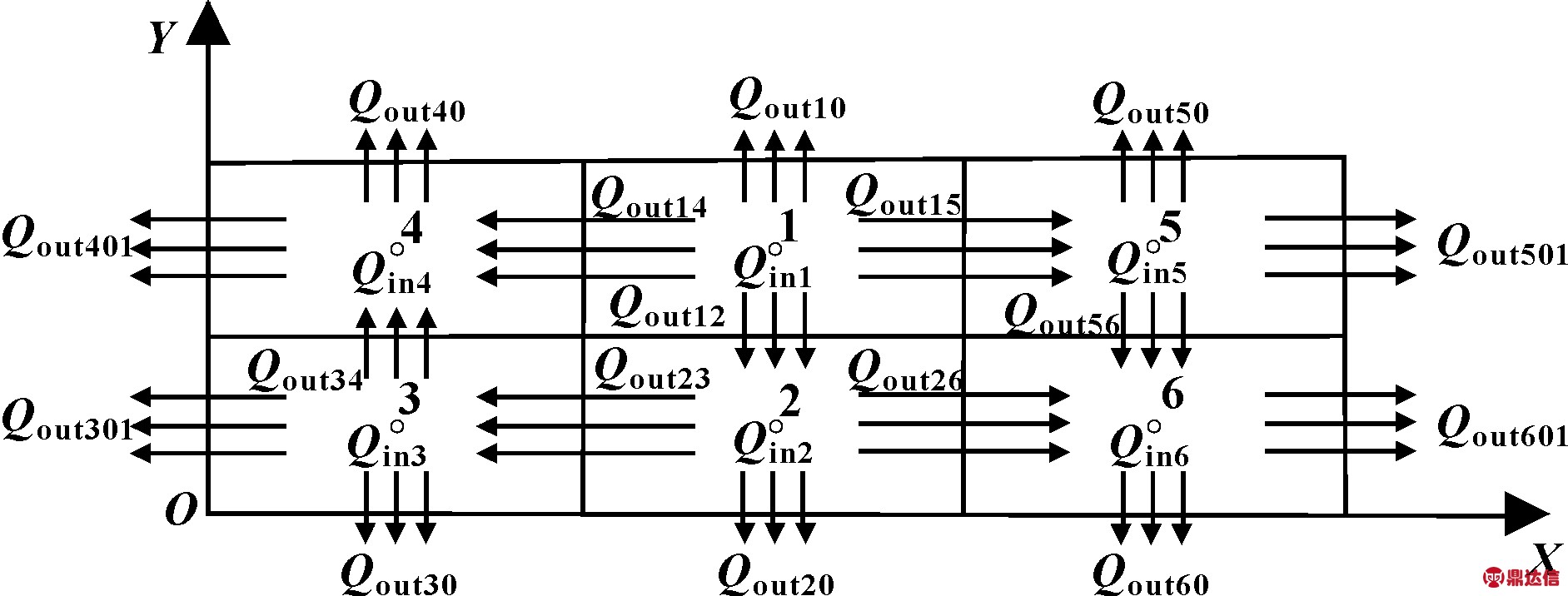
图3 气体流量平衡示意图
Fig 3 Schematic diagram of gas flow balance
1.3 边界条件
矩形气浮动导轨四周与大气相通,其边界条件如表1所示。表中pa为环境大气压力;p0为供气孔处的出口压力。
表1 边界条件
Table 1 Boundary conditions
2 轮廓仿真
假设动导轨表面绝对光滑,静导轨上表面存在轮廓误差,现拟合出静导轨上表面轮廓。
表面形貌在微观上由许多不同尺寸和形状的凸峰和凹谷组成,可以将零件粗糙表面形貌视为粗糙度轮廓、波纹度轮廓和形状误差3种不同波长成分的叠加[5-6]。基于此,为方便计算,本文作者采用波长不同、振幅不同的多个正弦函数来拟合表面轮廓,如图4所示。
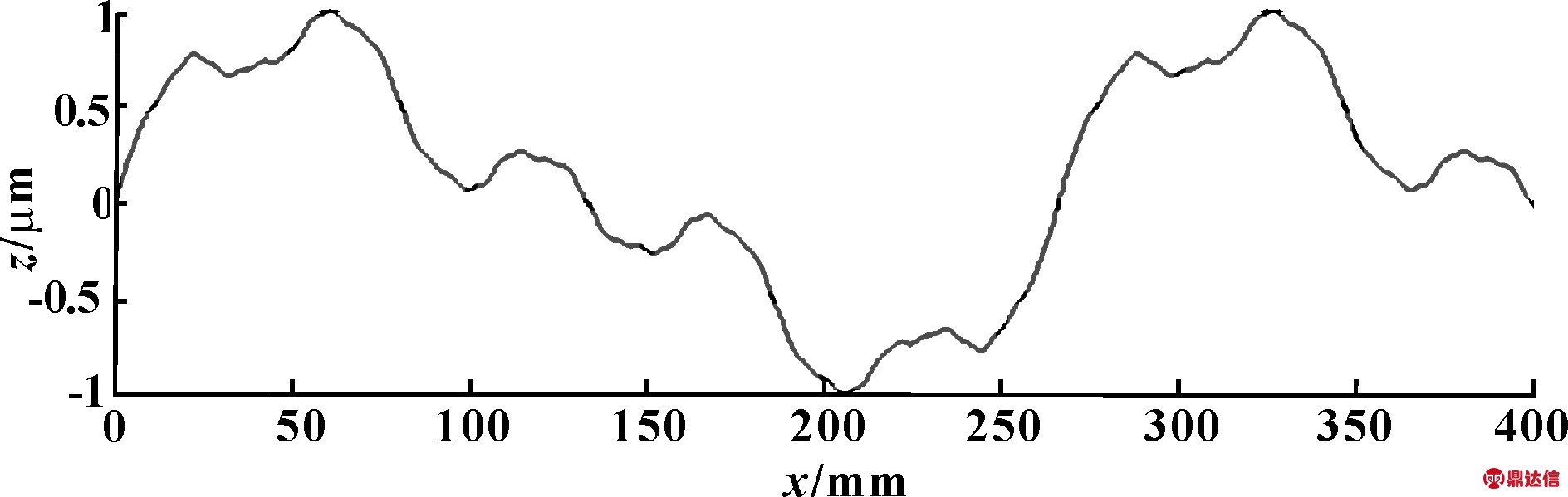
图4 静导轨轮廓线示意图
Fig 4 Outline of the static guide rail
3 动导轨平衡模型
3.1 动导轨平衡原理
由于存在轮廓误差,动导轨在运动时会受到不均匀力的作用,其运动轨迹并非是直线,而是呈现不同程度的倾斜、上升、下降等姿态如图5所示。为达到自身的平衡状态,需不断调整自身位置。首先假设理论厚度h0下的气膜承载力是G,在实际条件下(见图6),由于轮廓误差动导轨肯定会偏离原来的位置,以动导轨下表面几何质心S为高度方向变化量的参考点,以理论位置l1l2为角度方向变化量的参考位置,现给出任意一个动导轨位置,则出现一个高度方向的变化量Δh、角度变化量Δθ。当调整到一个合适的角度和高度值,动导轨就会达到新的平衡位置,一组Δθ和Δh就唯一确定一个动导轨的平衡位置。
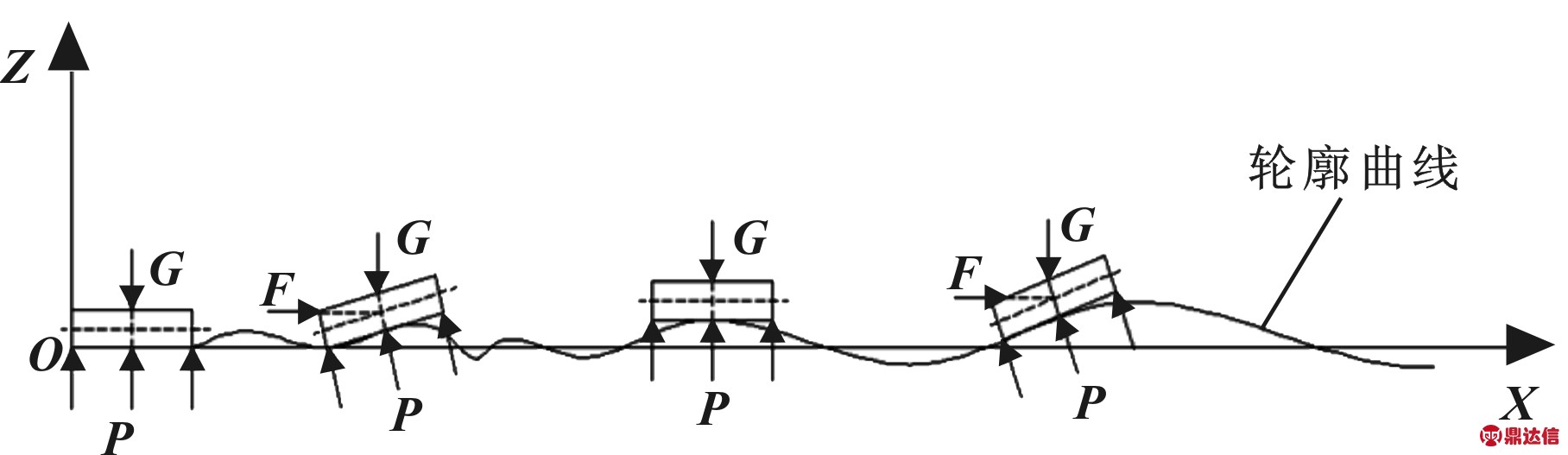
图5 动导轨运动规律示意图
Fig 5 Motion diagram of moving guide rail
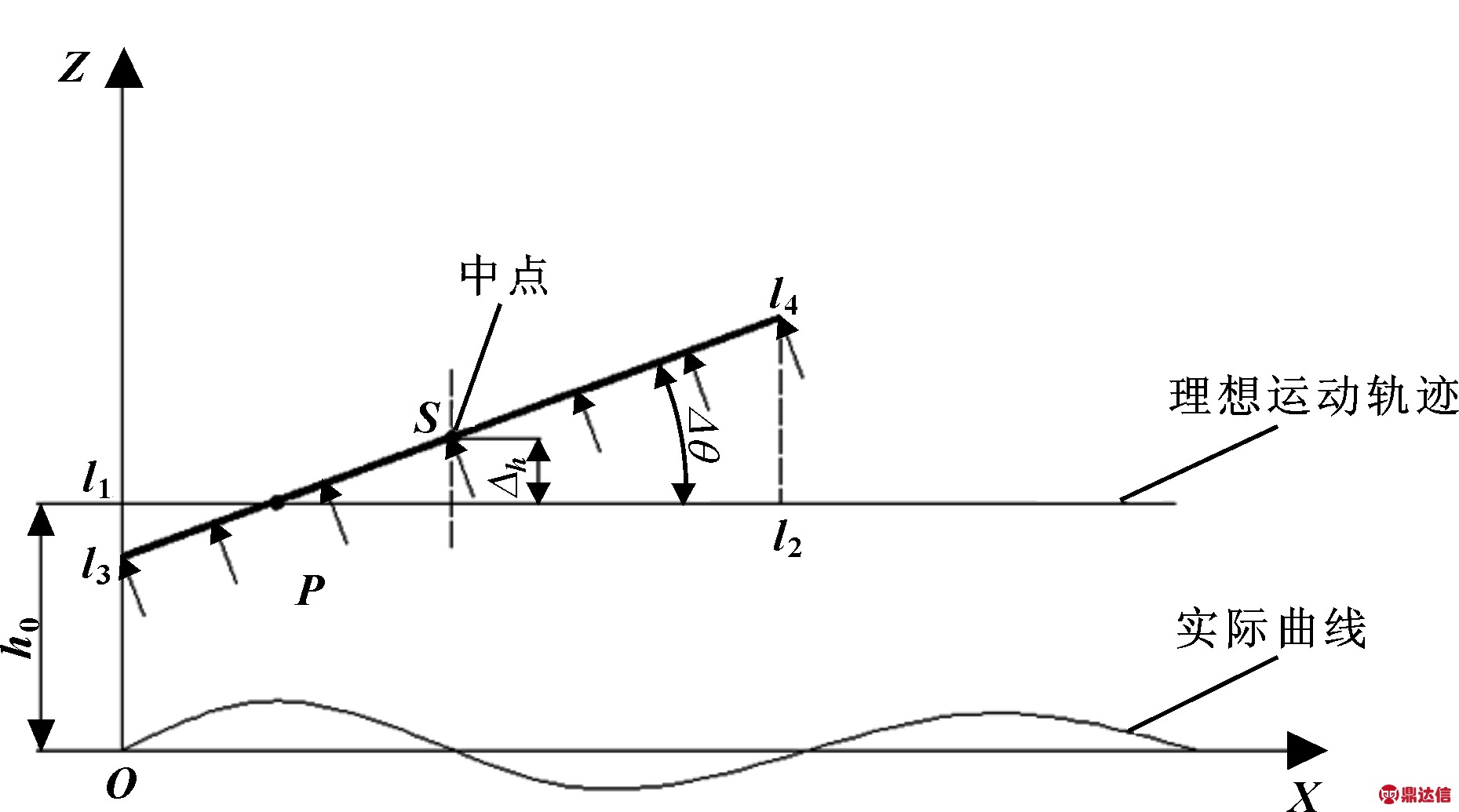
图6 动导轨姿态平衡示意图
Fig 6 Schematic diagram of attitude balance of moving guide rail
3.2 动导轨平衡条件
由动导轨平衡原理可知,其要达到平衡状态需要同时满足力平衡和力矩平衡,其受力、力矩示意图如图7所示。
图7 动导轨受力及力矩示意图
Fig 7 Schematic diagram of force and moment of moving guide rail
在水平方向上由于可变推力F的存在,动导轨在水平方向上一直处于平衡,故只需考虑竖直方向的力平衡问题及整体力矩平衡问题。在竖直方向,受施加载荷(G)及气膜承载力(w)竖直分量的共同作用。整体所受力矩为中轴线两边气体压强相对中轴线的力矩和(M1+M2),由此,可得出动导轨平衡方程为
(6)
其中:
(7)

(8)
可以采用梯形公式对公式(8)进行求解。
4 数值计算
4.1 气膜网格划分
首先要对气膜进行网格划分才可进行数值求解得出气体压力分布。运用有限差分,将相邻节点之间的差商来代替非线性微分方程中的微商,从而使非线性方程转化为线性方程来求解[7-8]。如图8所示,X方向为动导轨横向方向,即动导轨的运动方向,Y方向为纵向,X方向长度为100 mm,进行100等分,单位长度1 mm,Y方向是50 mm,进行62等分,单位长度0.81 mm,因此,通过网格划分共产生100×62个单元,每个单元的大小为1 mm×0.81 mm。
图8 计算平面
Fig 8 Calculation plane
4.2 差分离散
根据计算精度需要,利用二阶中心差分对控制方程进行离散,格式如下:
(9)
(10)

(11)

(12)
式中:i,j分别是x、y向的行标号与列标号;Δx、Δy依次代表x、y向等分的单位间距。
对式(2)进行离散差分整理可得压强平方![]() 的差分表达式:
的差分表达式:
(13)
最后用超松弛迭代法对式(13)进行迭代求出压强分布。
4.3 数值计算流程
利用有限差分、超松弛迭代、边界条件等采用MATLAB进行数值编程计算即可求解出气膜压力分布、气膜承载力、整体力矩等,之后根据动导轨
平衡条件,可以得出多组动导轨位置参数Δh、Δθ值。流程图如图9所示。
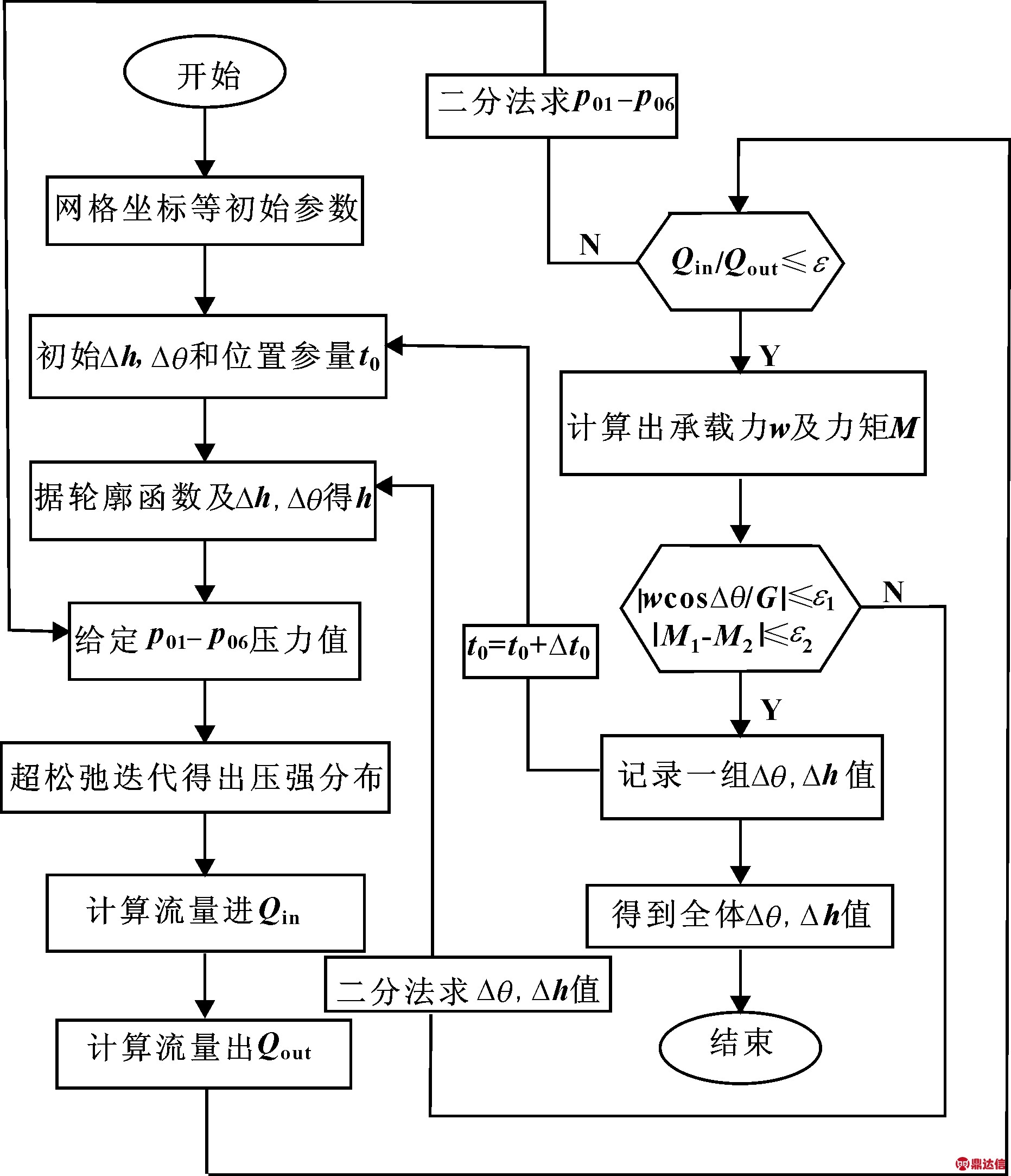
图9 平衡计算流程图
Fig 9 Balance calculation flow chart
5 无气体润滑状态
当导轨在没有气体润滑状态时,动导轨与静导轨为干接触摩擦状态。如图10所示,支撑动导轨的点必含有轮廓的一个极高峰值位置点(点2),设其在动导轨中点S右边(动导轨质心为中点S)。以点2为旋转中心,动导轨由位置Ι逆时针旋转直到S点右边与轮廓有最先碰触的点(点1)产生,设此为位置Π。位置Π即是动导轨的平衡位置,Δh0和Δθ0便为其位置参数。基于该思想,可以利用MATLB计算出多组Δh0和Δθ0值。
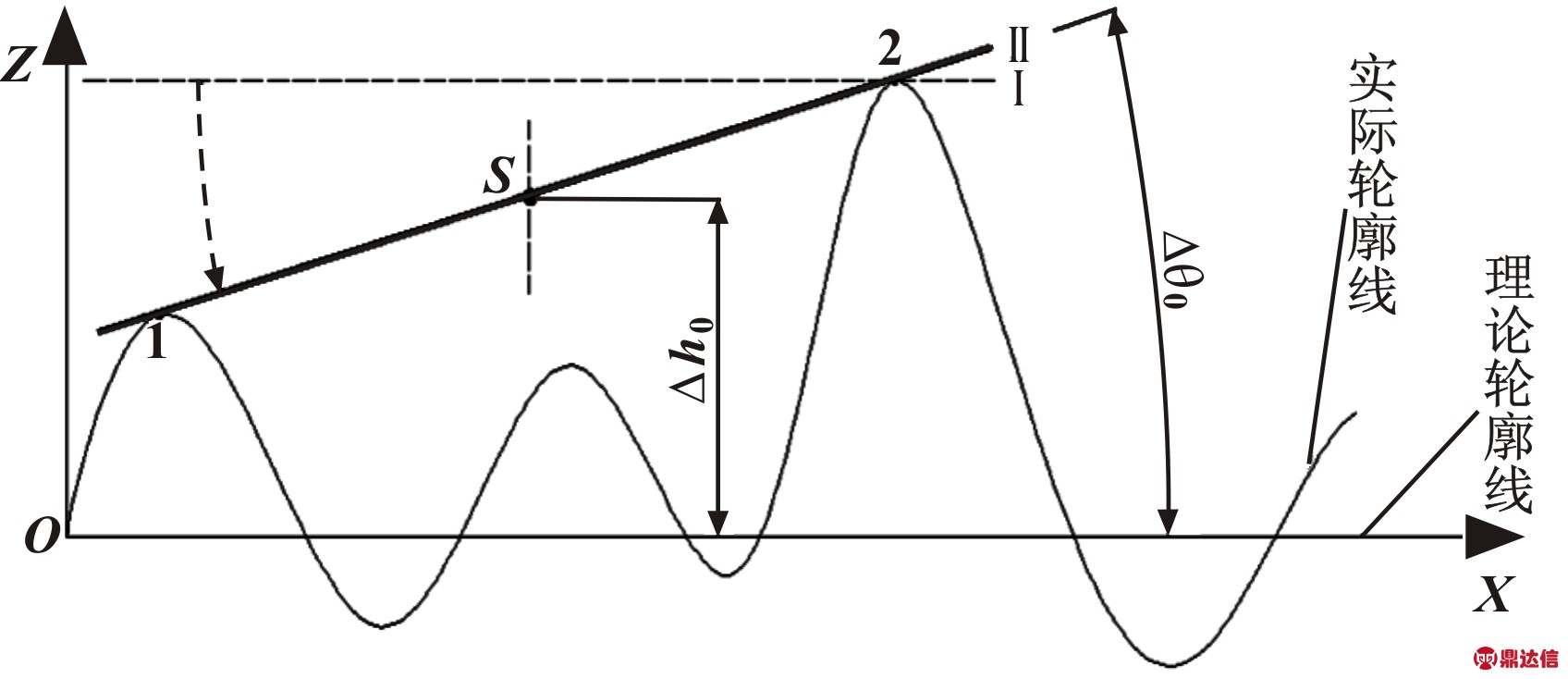
图10 无气体润滑状态动导轨平衡位置求解示意图
Fig 10 Schematic diagram of the solution of equilibrium position
of non-gas lubricated state moving guide rail
6 实例计算分析
6.1 计算参数设定
选取动导轨尺寸为100 mm×50 mm,静导轨轮廓长度为400 mm,直线度误差为f0=2 μm,故动导轨最大运动距离为300 mm。理论气膜厚度h0=10 μm,供气压力ps=0.4 MPa,气体常R=8.31 J/(mol·K),供气温度T=310 K,隔热比对数k=1.4,气体动力黏度μ=18.83×10-6Pa·s,气体流量系数为c=0.85,节流孔直径d=0.5 mm。气体流量误差设为1%,力平衡和力矩平衡误差分别设为1%和2%。位置参数变化量Δt0=10 mm。节流孔双排分布,每排3个。
6.2 结果及分析
首先通过有限差分及超松弛迭代法(SLOR)法求得理想状态下h0=10 μm时的压力分布,得出气膜承载力数值G作为动导轨施加力,参与考虑轮廓误差运动状态下的计算。之后基于气体润滑状态和无气体润滑状态2种条件,分别计算得出多组Δh和Δθ0值,绘制出曲线图,如图11所示。
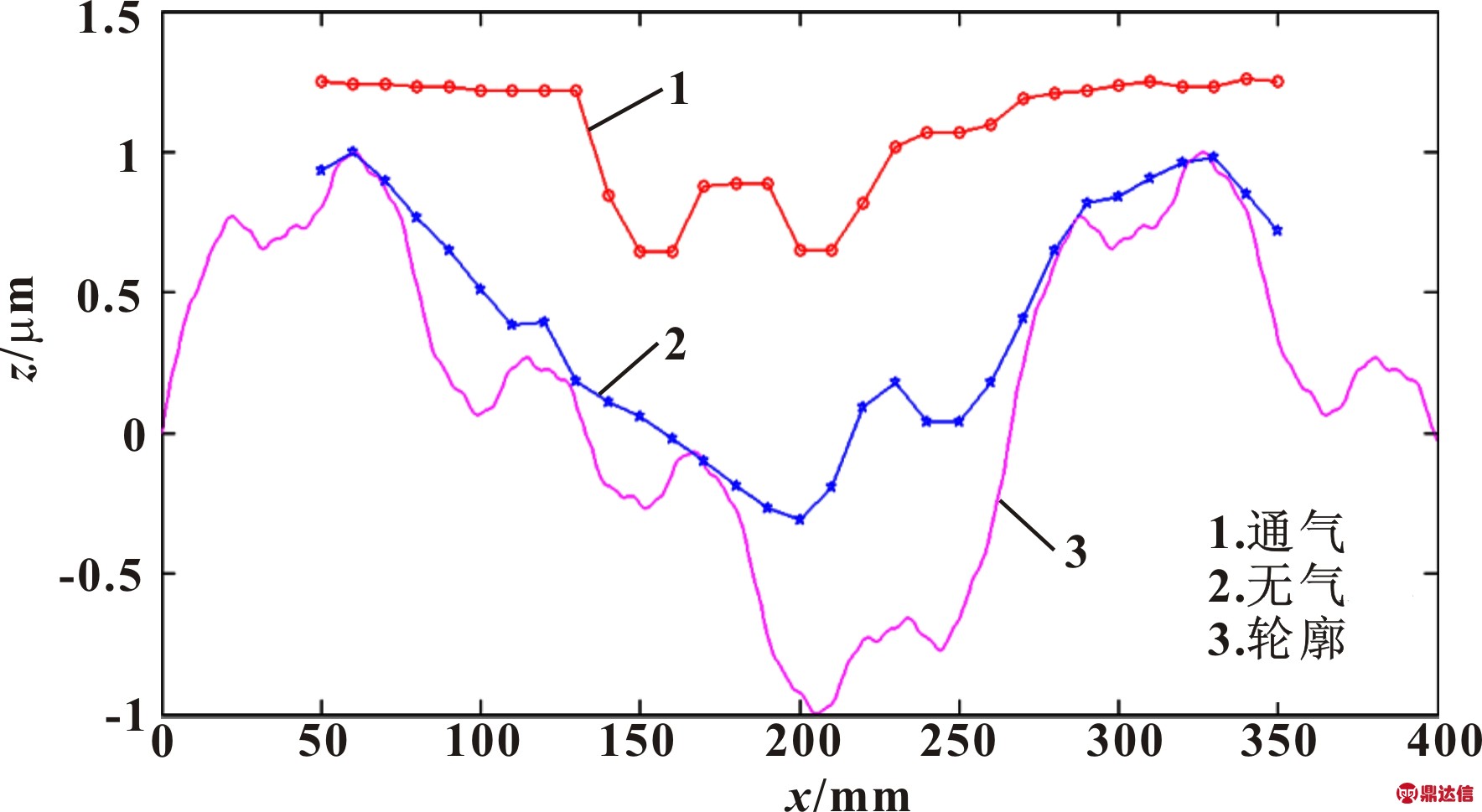
图11 不同状态动导轨运动轨迹曲线图
Fig 11 Moving track curve of different state moving track
图11中曲线1为通气条件下动导轨S点运动轨迹,曲线2为无气体润滑条件下动导轨S点运动轨迹,曲线3为静导轨轮廓轨迹线,其直线度大小为f0=2 μm。S点从X轴坐标50 mm处开始运动,直到坐标值为350 mm处结束。由直线度求解方法--最小区域包容法,计算得出2种状态下的直线度误差:无气体润滑状态直线度误差fn=1.31 μm,气体润滑状态直线度误差fy=0.65 μm。fy/fn=0.496,fy/f0=0.325,可以看出动导轨运动精度有了很大的改善,气体误差均化效果明显。
7 结论
(1)通过数值计算的结果可以看出气浮导轨在通气状态时与无气体润滑状态时相比其运行直线度提高了约一倍,与静导轨轮廓误差相比提高了约2/3,气体润滑很好地实现了误差均化作用,且效果明显。
(2)建立了一种计算气体误差均化效应的方法,为探究误差均化的各个影响因素奠定了理论基础。


