
摘要 电动车无线供电导轨运行时,会出现多辆车集中在一段导轨取电的现象,即多负载工作模式。针对多负载模式下系统稳定性问题,本文重点分析了多负载系统中负载数量对系统稳定性的影响,得到了负载个数的边界条件;同时,针对多负载模式下大功率供电易引起线圈击穿的问题,提出了一种L型线圈结构和T型磁心结构,在保证功率传输的前提下,有效地降低了供电导轨的自感,确保了多负载系统的安全性。仿真和实验验证了理论分析的正确性。
关键词:无线电能传输;电动车;多负载;边界条件;耦合机构
由于环境污染和能源短缺,电动汽车越来越受到重视。随着电动汽车的不断普及,传统的接触式充电方式存在较多安全隐患和充电限制,车载电池的容量与成本问题也凸显出来,这些都制约着电动车的发展与推广。电动车无线供电技术基于无线电能传输(wireless power transfer, WPT)技术[1-9]以非接触方式完成电能的传递,可以为行驶状态的电动车进行实时能量供给,延长了续航里程。
电动车无线供电技术的优越性使得相关技术的研发相当活跃。文献[10]提出一种用于电动车无线充电的电磁耦合机构;文献[11]对于无线供电导轨的切换进行了研究;文献[3]提出一种初级绕组并联的无线供电方法,提升系统传输的功率和效率;文献[12]提出了DD型和DDQ型线圈结构,增大了系统的充电区域;文献[13]提出一种I型供电导轨,实现了电动车的无线供电;文献[14]提出一种线圈阵列耦合机构,实现了电动车的无线供电。
为了实现电动车无线供电,需要铺设较长距离的供电导轨。电动车无线供电系统供电导轨运行时,会出现多辆车集中在一段导轨上取电的现象,即一个供电侧对应多个负载设备,此时存在多个拾取回路。在这种模式下,存在多个原副边能量传输通道,不同于传统一对一传输模式。此外该模式下负载的变化以及投切的随机性,使得系统原边电路的阻抗参数发生动态变化,从而导致系统工作频率的漂移,进而大大降低传输的功率和效率。针对上述问题,文献[15]提出了多负载系统实现最大传输效率、最大输出功率的条件;文献[16]基于惟一谐振点的条件,推导出了多负载系统的稳定条件;文献[17]提出采用p 型谐振网络、补偿电感、开关电容阵列来增加多负载系统的频率稳定性。同时,多负载供电模式下,系统功率容量增大,使得谐振电流较大,当供电导轨自感较大时[11,18],会导致线圈两端的谐振电压过高,易击穿线圈,从而引发安全事故。
以上研究多集中在多负载系统的输出功率、传输效率以及负载变化对频率稳定性的影响等方面,但未对多负载系统中负载个数对系统稳定性的影响以及多负载系统供电导轨安全性进行深入研究。因此,本文首先给出了多负载系统的等效电路模型;其次,分析了负载个数的边界条件,同时提出了一种适用于大功率的供电导轨结构;最后,通过仿真和实验验证了理论分析的正确性。
1 电动车无线供电系统多负载模式分析
1.1 系统拓扑
电动车无线供电是指车辆在行驶状态下,通过供电导轨为电动车进行实时非接触供电。本文研究的电动汽车无线供电系统,采用电压源型SS补偿拓扑,系统拓扑如图1所示。初级侧部分,电压源E经过DC/DC变换后注入由4个绝缘栅双极型晶体管(insulated gate bipolar transistor, IGBT)组成的全桥逆变网络,逆变后进入由电容Cp和电感Lp组成的串联谐振网络,从而在电感Lp中激发出高频磁场。次级侧部分,能量拾取线圈Ls和电容Cs构成谐振网络,并经过整流、滤波及调压后供给电动机或电池负载。
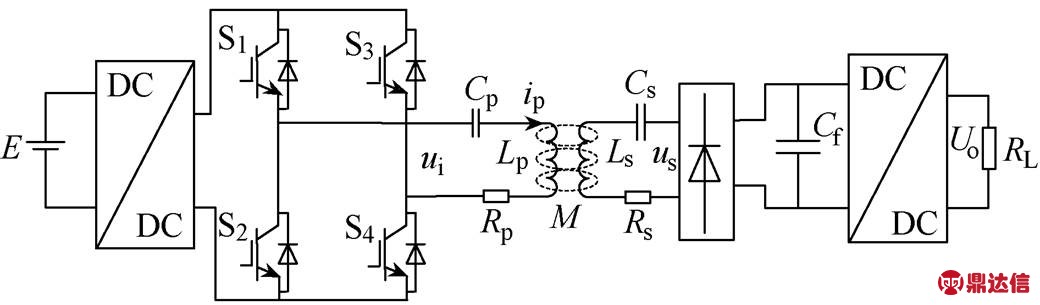
图1 系统拓扑
1.2 多负载系统模型
本文采用串联-串联(SS)补偿拓扑作为研究对象,忽略负载拾取线圈间的互感[19],系统等效电路模型如图2所示。图2中,Us为高频电压源,原边导轨Lp和谐振补偿电容Cp构成原边谐振网络,Rp为原边导轨内阻,ip表示原边谐振电流。副边拾取线圈Li(i=1,2,…,n)和谐振补偿电容Ci(i=1,2,…,n)组成n个副边谐振网络,Ri、Reqi和ii(i=1,2,…,n)分别表示拾取线圈内阻、等效负载电阻和副边高频电流。Mpi表示原边导轨Lp和拾取线圈Li之间的互感。
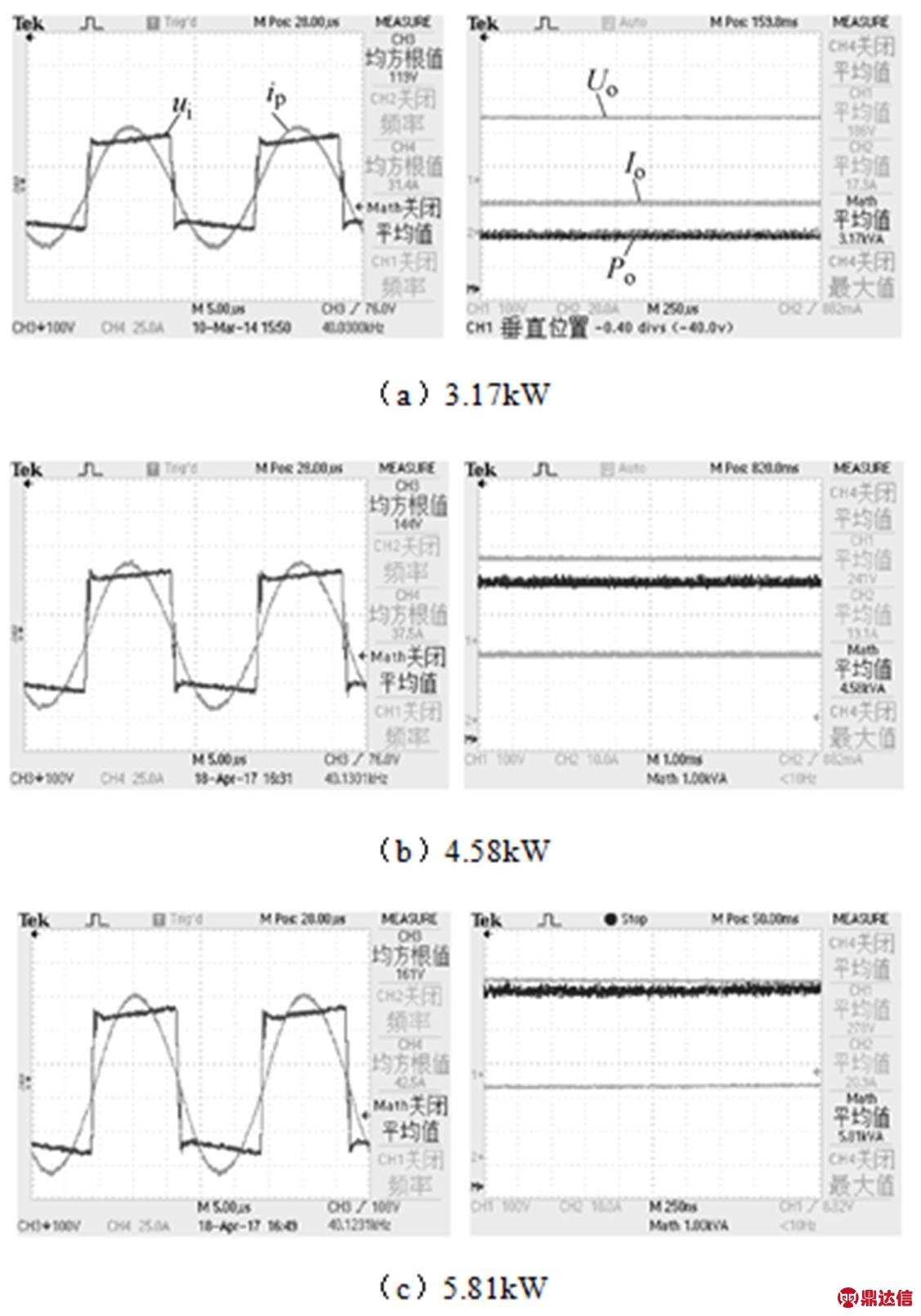
图2 多负载系统等效电路模型
根据互感耦合模型和KVL可得系统各参数间的关系为
 (1)
(1)
式中: ;
;
 ;w 为系统工作频率。
;w 为系统工作频率。
对于WPT系统副边拾取机构参数,一般应满足如下关系
 (2)
(2)
式中,w0表示副边固有谐振频率。
1.3 负载数量边界条件分析
当系统工作在谐振频率附近时,其工作频率可以表示为 ,e 表示工作频率偏离谐振频率的程度。令Rsi=Ri+Reqi,则第i个拾取的阻抗Zi为
,e 表示工作频率偏离谐振频率的程度。令Rsi=Ri+Reqi,则第i个拾取的阻抗Zi为
 (3)
(3)
由于WPT系统一般工作在高频状态,故当ε较小时,(e/w0)2可忽略不计。因此,式(3)可简化为
 (4)
(4)
式中, 表示副边电路的品质因数。
表示副边电路的品质因数。
在WPT系统中,副边对原边部分的耦合作用直接体现为反射阻抗,该反射阻抗直接作用于系统谐振网络[20],可表示为
(5)
则系统总阻抗Zt为
(6)
为了保证系统的传输效率和稳定性,系统常常工作在谐振频率点上,同时避免出现多谐振点现象。对于多负载系统,Zt的相频特性曲线应满足正斜率穿过谐振频率点的要求,避免出现多谐振点,以保证系统的稳定。因此,Zt的虚部应满足如下的关系式
 (7)
(7)
若考虑n个能量拾取线圈完全相同,即L1=…=Ln=L,且认为所有取电车辆都位于供电导轨上,则原边线圈与拾取线圈间的耦合系数相等,即Mp1=…=Mpn=M。此外,取电阻Rc,其值满足
 (8)
(8)
将式(7)简化,可推导出负载个数的边界条件
 (9)
(9)
若考虑n个拾取机构完全相同,则品质因数相同,式(9)可表示为
(10)
2 导轨结构优化设计
2.1 导轨结构设计
为满足大功率系统的输出功率需求,原边供电导轨会承受较大的谐振电流。当供电导轨自感较大时,供电导轨两端的无功电压会异常大[11,18],易击穿供电导轨,从而引发安全问题。
文中所设计的原边供电导轨使用三匝线绕制,形成上下两层线圈,下层为逆时针绕制的两匝线圈,上层为逆时针绕制在下层线圈中最外层线圈上面的一匝线圈,其截面呈L型。同时,为使磁场分布均匀,使用T型磁心,增强导轨中心的磁通密度,保证拾取线圈平面上磁场的均匀性。能量拾取线圈采用矩形线圈[11],磁心结构设计为弓字型,以增加耦合系数。耦合机构结构图如图3所示。
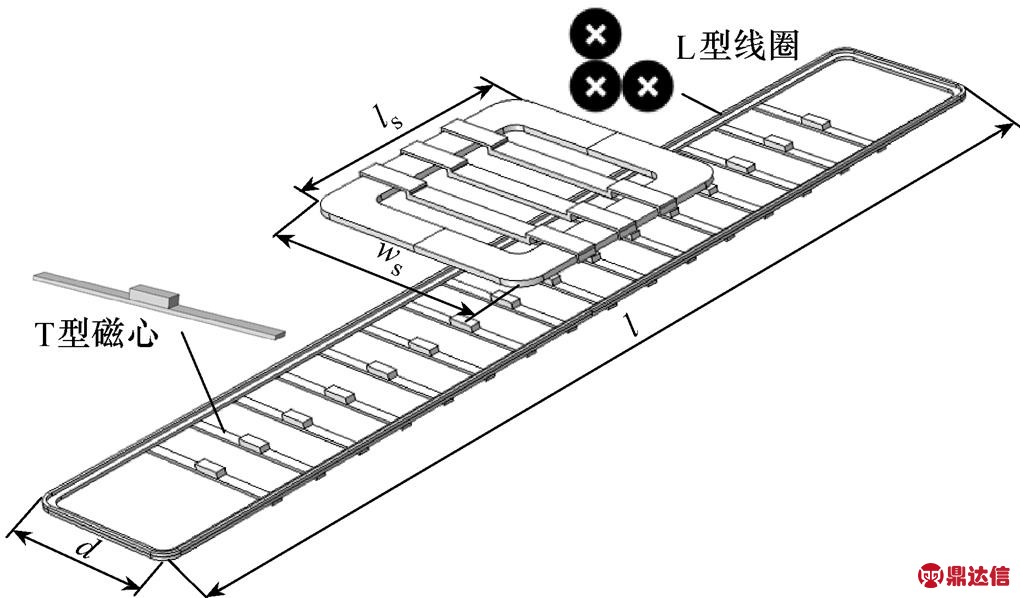
图3 耦合机构结构图
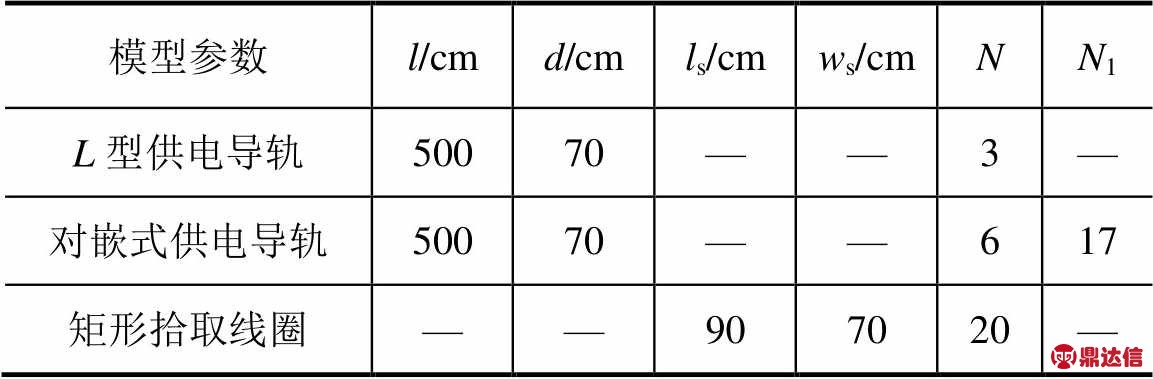
为验证文中所提导轨结构能否满足大功率系统下的功率传输要求和安全要求,本文利用多物理场建模与仿真软件COMSOL分析磁耦合机构的特性。为便于对比,建立了文献[11]的对嵌式供电导轨的仿真模型,具体参数见表1。L、d和N分别表示导轨的长度,宽度和匝数,ls、ws分别表示矩形拾取线圈的长度和宽度,N1表示对嵌式供电导轨切换域的匝数[12]。
表1 L型导轨、对嵌式导轨以及矩形拾取线圈参数
当供电导轨与拾取线圈之间的耦合距离设定为750px时,仿真得到两种导轨处于不同位置时的互感值,绘制如图4所示的曲线。s表示矩形拾取线圈中心位置随着导轨移动的距离。
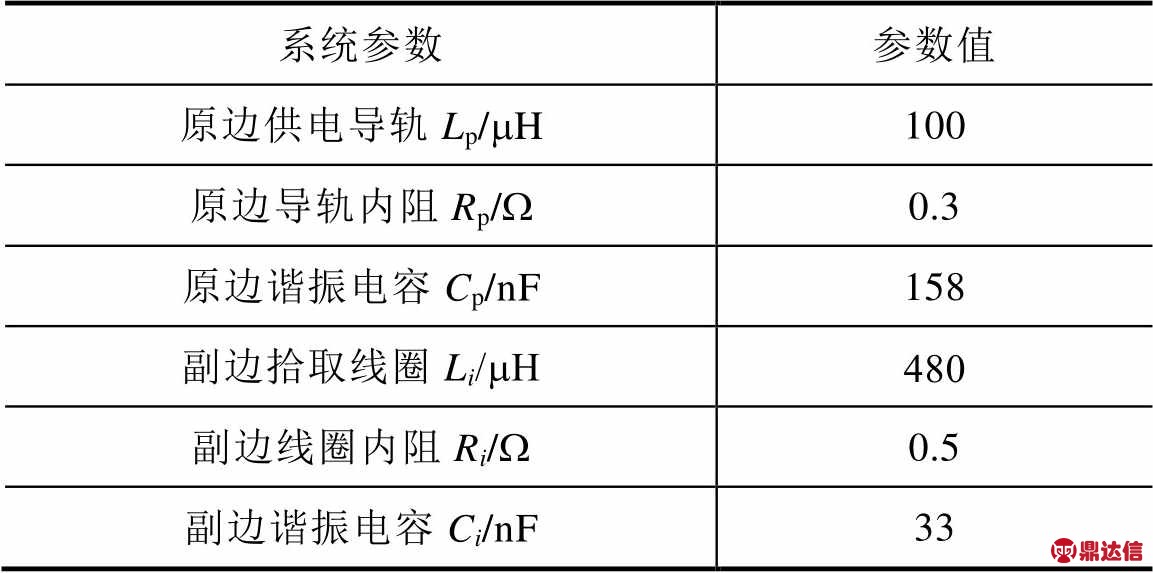
图4 互感值仿真曲线
图4中,0~1125px,随着拾取线圈逐渐进入供电导轨,互感逐渐上升;45~11375px,拾取线圈完全进入供电导轨,互感基本维持稳定;455~12500px,随着拾取线圈驶出供电导轨,互感逐渐减小。
基于表1的参数,仿真可得到L型导轨自感值约为100mH,内阻0.3W;对嵌式自感值约为520mH,内阻0.7W。对嵌式自感值远远大于L型导轨,而由图4可得L型导轨互感值略小于对嵌式导轨。
文中所设计的供电导轨结构在保证激发磁场强度的前提下,大大降低了导轨自感,从而减小了导轨两端的无功电压,保证了系统的安全。此外,降低了供电导轨内阻,提升了系统效率。
2.2 磁场特性分析
系统耦合机构磁感应强度分布云图如图5所示,显示了各区域的磁感应强度大小。
由图5(a)可知,供电导轨能够在整个导轨的耦合距离平面上产生一个均匀的磁场,保证了多车辆取电的稳定性以及提升了系统的抗偏移性。由图5(b)可知,供电导轨产生的磁场大部分耦合到能量拾取线圈,用于能量的传输,小部分泄露到空气中形成漏磁。
图5 磁感应强度分布云图
3 仿真与实验研究
基于得到的负载个数的边界条件,采用Matlab编程进行验证,所采用的参数见表2。
表2 系统参数表
基于以上系统参数,Zt的相频特性曲线如图6所示。由式(9)可得负载个数边界条件为n≤2。
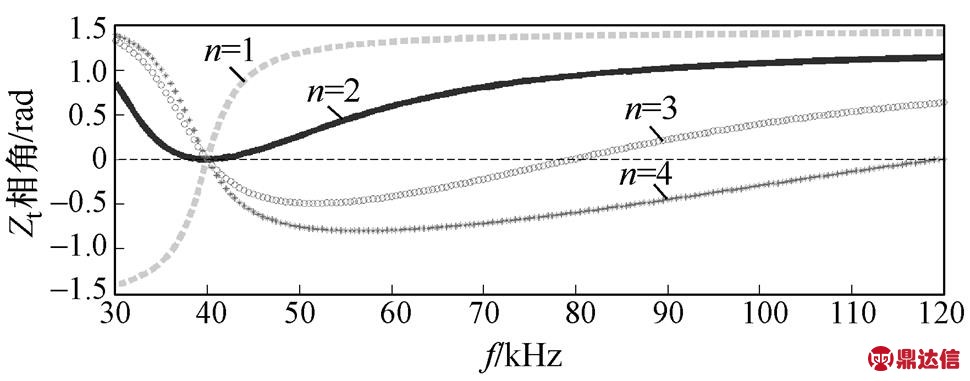
图6 Zt的相频特性曲线
由图6可知,当n≤2时,系统只有一个谐振频率点;n>2时,系统有两个谐振频率点,出现了多谐振点现象。上述仿真结果表明了由式(9)得到的负载个数边界条件的有效性。
为了测试所提L型线圈结构在不同功率点的运行状况,选择不同功率等级作为测试点。测试波形如图7所示,其中左图为逆变输出电压ui和电流ip的波形,右图为整流桥输出电压Uo,输出电流Io和输出功率Po的波形。
图7 L型线圈测试波形
由图7可知,系统输出功率为3.17kW、4.58kW和5.81kW时,谐振频率均保持在40kHz,说明了系统的稳定性不受输出功率改变的影响。
基于图7所示的实验结果,供电导轨两端的无功电压以及耦合效率见表3。为便于对比,对嵌式发射线圈两端的无功电压是以相同谐振电流来计算。
表3 耦合效率和无功电压
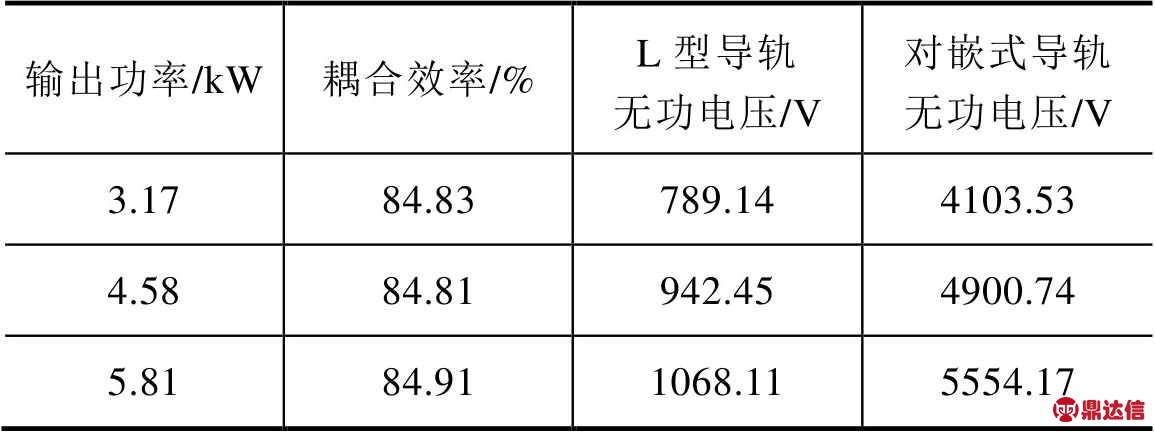
从表3可以看出,本文所设计的L型导轨耦合效率为85%左右;导轨两端的无功电压远低于对嵌式导轨,避免了供电导轨被击穿的危险。同时,在输出功率5.81kW的情况下,L型导轨的无功电压为1068.11V,仍维持在较低的水平,说明系统的功率可以进一步提升,保证了多负载系统大功率供电的安全性。
4 结论
本文针对电动车无线供电系统多负载工作模式下系统稳定性问题,重点研究了负载数量对系统稳定性的影响,得到了负载个数的边界条件;针对多负载模式中大功率供电引发的导轨击穿问题,提出一种L型线圈和T型磁心结构,在保证激发磁场强度的前提下有效地降低了导轨自感,保证了系统的安全性。仿真和实验结果证明了理论分析的正确性。本文研究结果对于电动车无线供电系统的设计具有一定的参考价值。


