
摘 要:为获得超精密工作台系统特性,针对双闭式气体静压导轨超精密工作台的振动特性展开研究。建立了工作台系统的动力学模型,推导了系统振动微分方程。通过实验得出了在实际工况中较为准确的线性弹簧刚度,用线性弹簧模拟气体静压腔,简化了系统动力学模型。最终根据系统振动微分方程建立仿真模型并进行了求解和分析,得到了仿真系统的固有频率和振型,并通过振动实验验证了仿真模型的准确度。气体静压系统的隔振效果在于高频范围,其模态特性符合超精密工作台系统的结构要求。
关键词:气浮工作台; 振动; 闭式; 动力学; 仿真
0 引 言
超精密工作台是光栅刻划机等精密设备的核心单元之一,其运动精度直接影响光刻机的分辨力[1],工作台的振动直接影响到最终整个设备的精度,同时非定常的气流会给测量系统带来误差[2-8]。超精密工作台的性能对纳米级加工设备有着至关重要的作用,国内超精密工作台的气体静压导轨结构形式很多,很多学者对其振动特性在理论及实验上做了很多工作[9-10],但是对于双闭式气体静压导轨的应用以及对其振动特性研究还不多见[11-13]。鉴于此,本文针对双闭式气体静压导轨超精密工作台的振动特性展开研究。
1 纳米级超精密工作台结构
整个工作台由花岗岩导轨、动导轨、承载台和Z向驱动系统组成。Z向驱动系统通过压电陶瓷驱动实现整个工作台的快速响应和高精度定位,完成纳米级进给;承载台与动导轨一起由气体静压系统支撑,悬浮于花岗岩定导轨上。整个实验装置都固定安装在5 Hz的花岗岩光学隔振平台上,结构如图1、2所示。
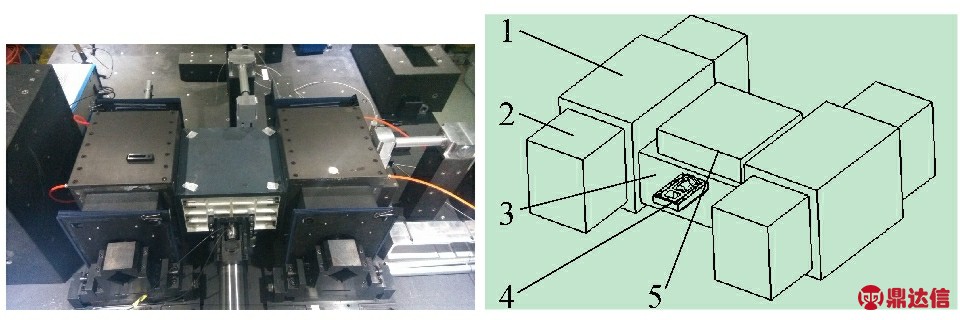
1-动导轨,2-花岗岩定导轨,3-承载台,4-Z向驱动系统,5-工件
图1 工作台结构组成
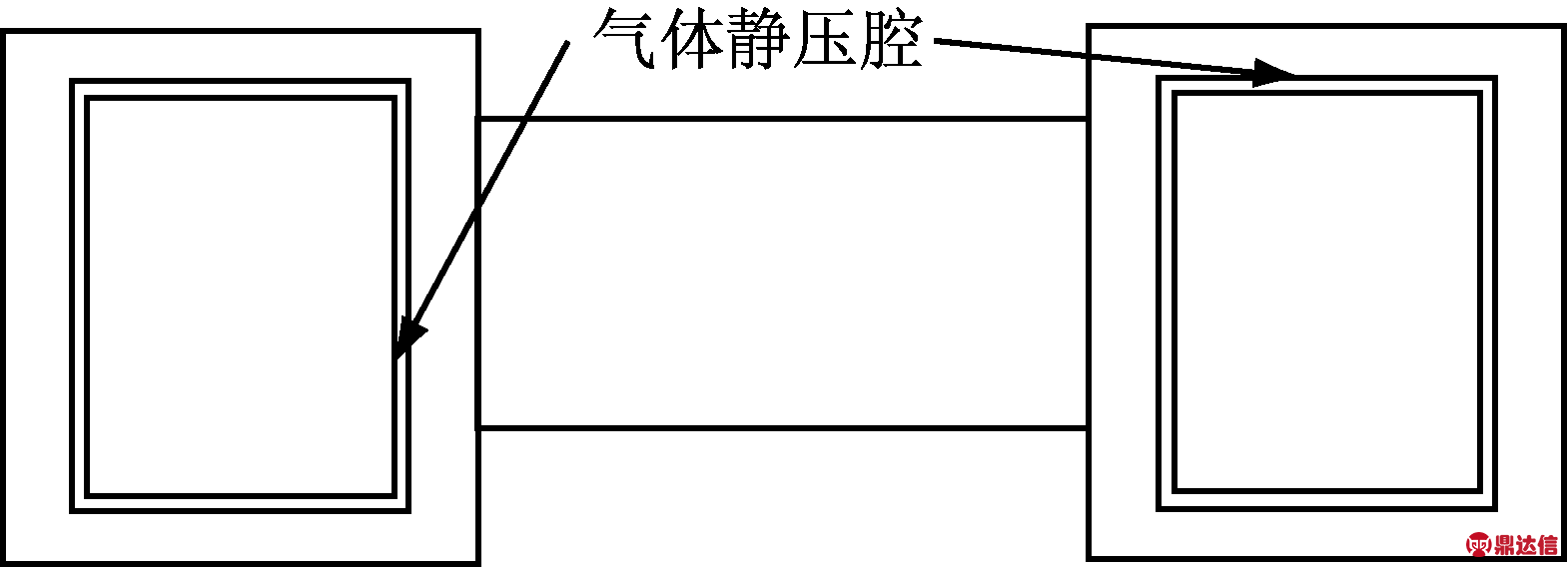
图2 空气静压导轨的结构形式
2 动力学模型简化
动导轨、承载台的连接默认为刚性连接,简化为一个刚体。动导轨与花岗岩之间的气体静压腔平衡位置简化为线性弹簧,闭式气体静压的刚度为两侧开式刚度之和[14]。Z向驱动系统作为支撑,约束了图3中刚体A的Z方向平动,ux及uy的转动。工作台的力学模型简化如图3所示。
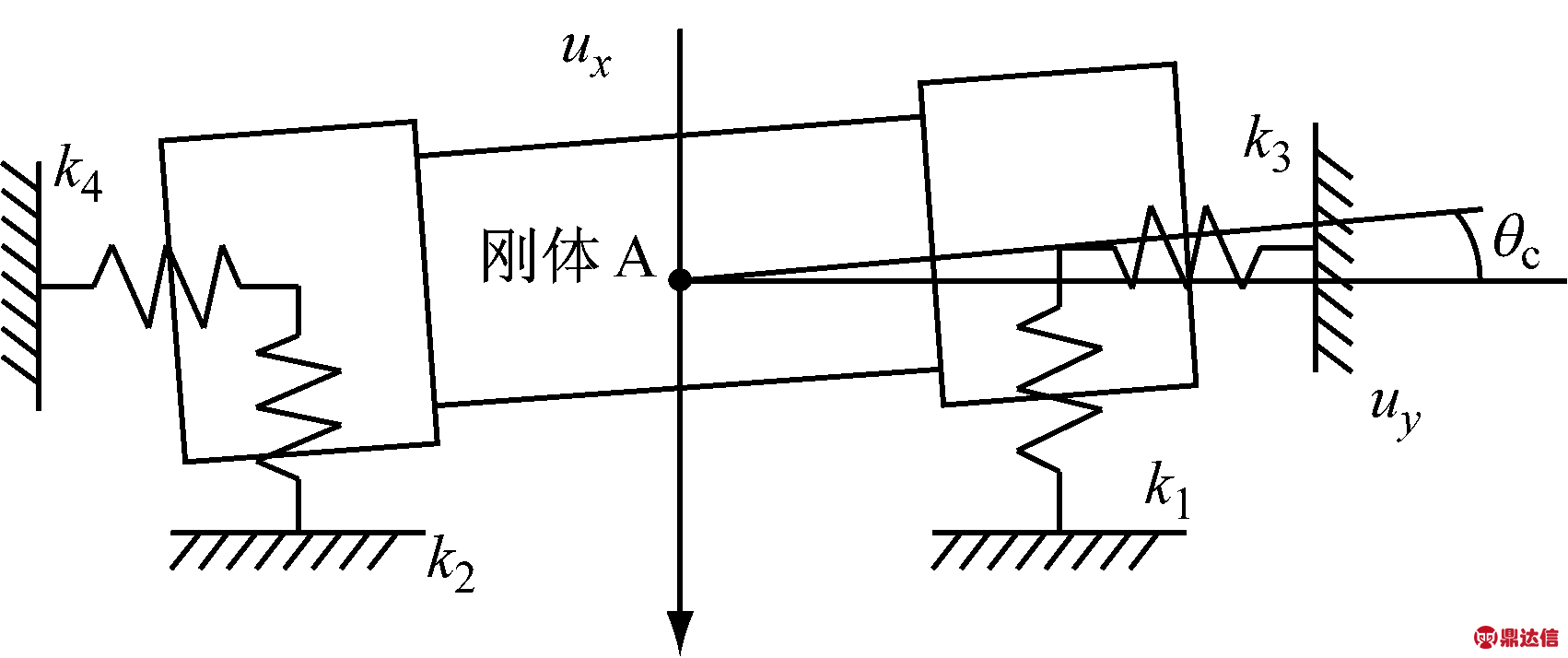
图3 简化动力学模型
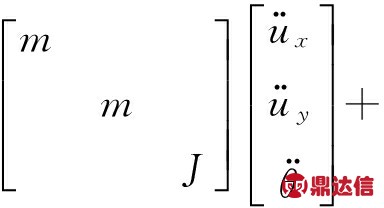
以刚体A质心处的坐标系建立系统的运动微分方程。得出平面运动动力学方程[15]:
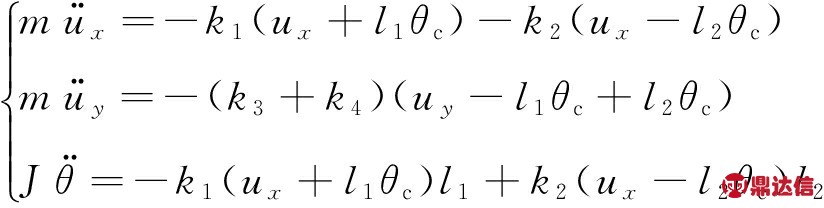
(1)
式中:m和J分别表示刚体A的质量和转动惯量;ux、uy分别表示刚体A质心的偏移;θc表示刚体A质心整体绕Z轴的旋转。
选取q=(ux,uy,θ)T; q为系统广义坐标,由拉格朗日法可得系统振动微分方程,矩阵形式为:
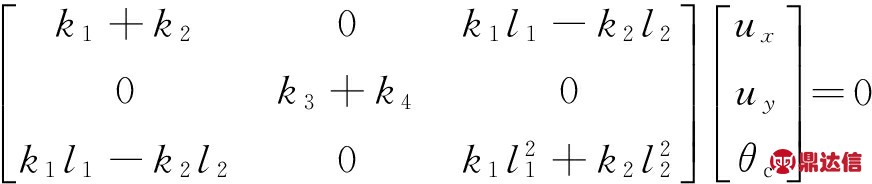
(2)
从振动方程可以看出,系统质心平动与质心转动引起的惯性力不耦合,但弹性力耦合,假设模型完全对称,l1=l2,刚度矩阵的非对角线元素为零,刚度未耦合。
3 仿真结果
在有限元软件中进行模态分析。整个刚体A作为一个单元,设定边界条件时,将气体静压支撑简化为单根弹簧,分别在整个气腔的对称中心位置模拟气体静压对整个系统的影响,如图4所示。弹簧刚度通过静态试验测量原理如图5所示[16]。用NCDT6500电容测微仪,分辨率0.003 75 nm,精度5‰。在动导轨上加3 kg的标准砝码,电容测微仪显示读数变化量为0.2 μm,刚度为150 N/μm。在有限元软件中进行模态分析后得到工作台的前6阶固有频率和振型,如表1所示。
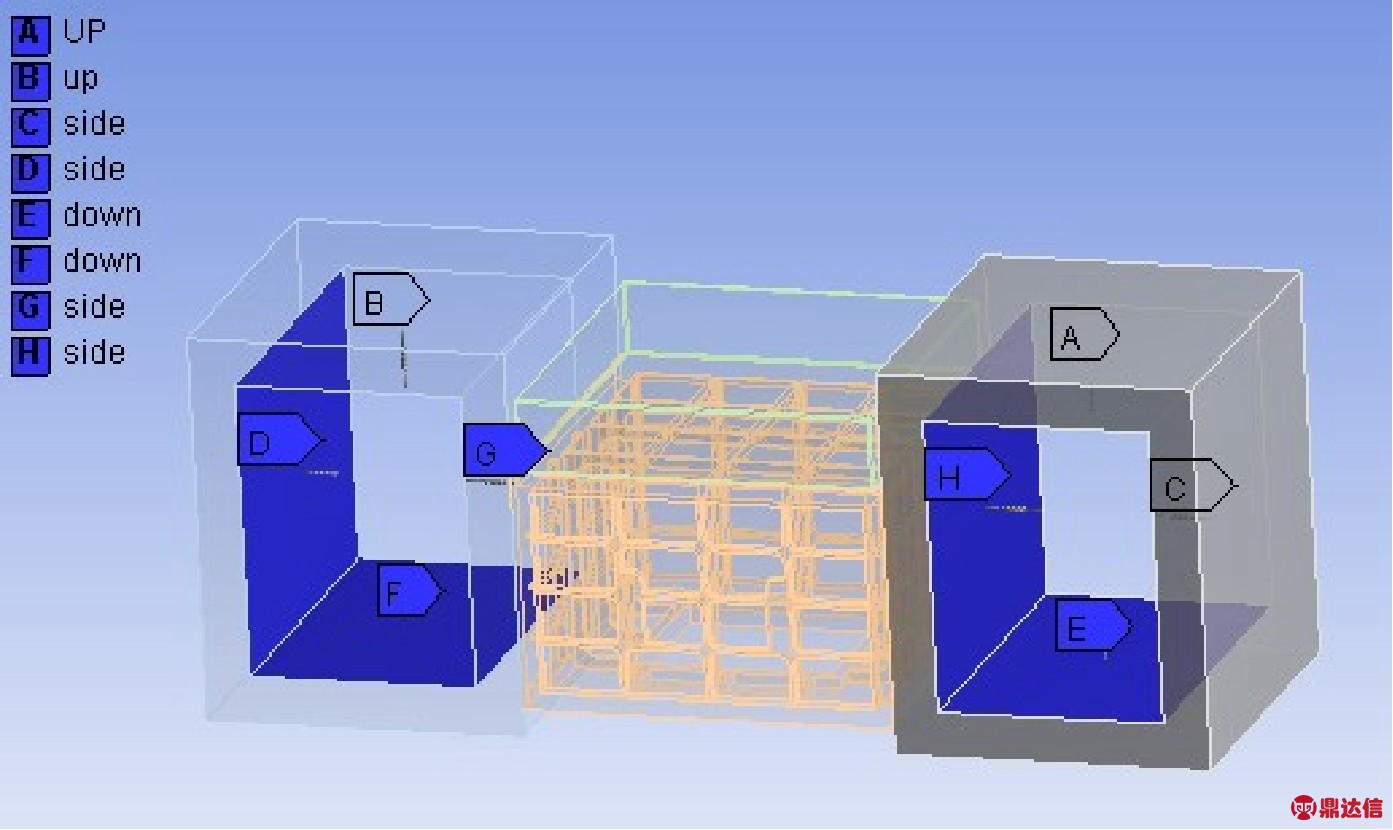
图4 仿真模型
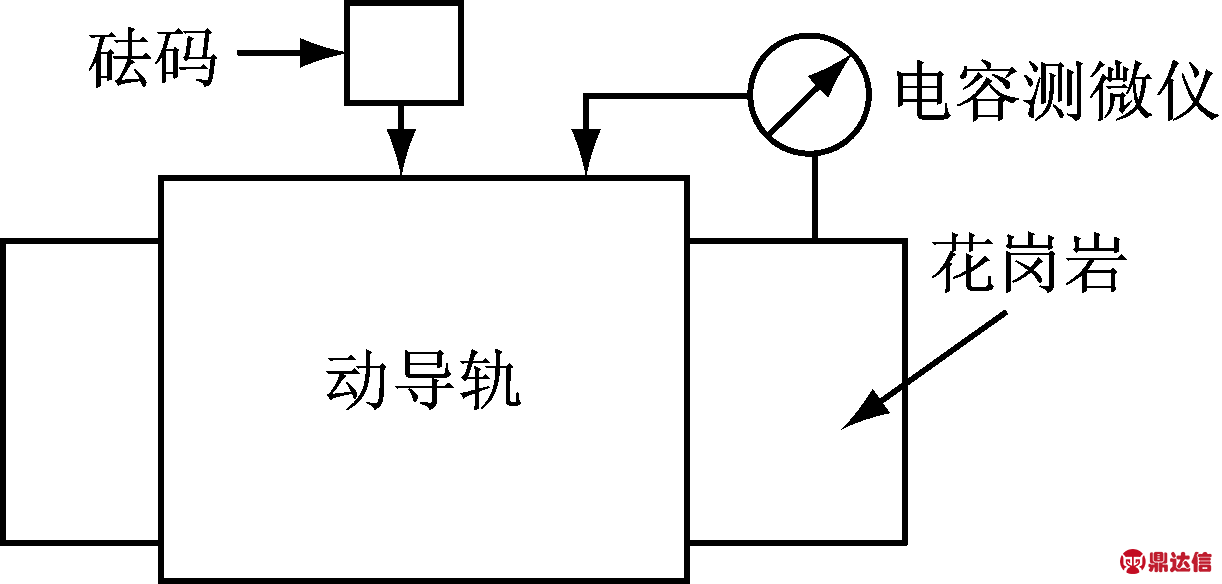
图5 弹簧刚度静态测量实验 表1 超精密工作台的仿真结果
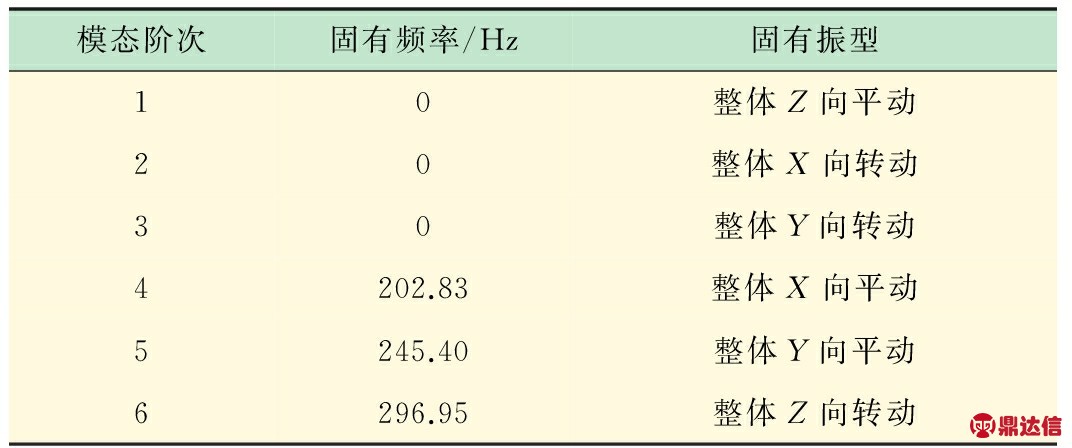
由仿真结果(见图6)可以看出,整体的平动和转动频率在0~300 Hz。
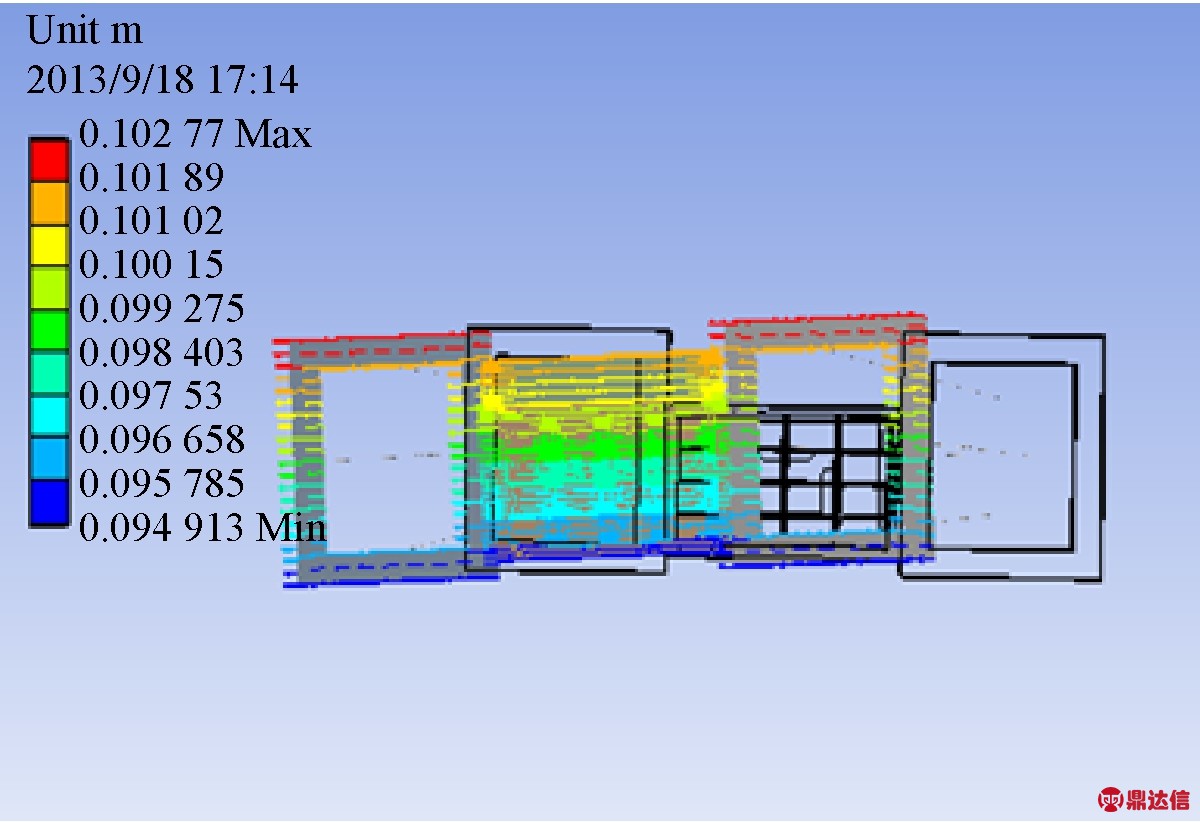
(a) 整体Y向平动
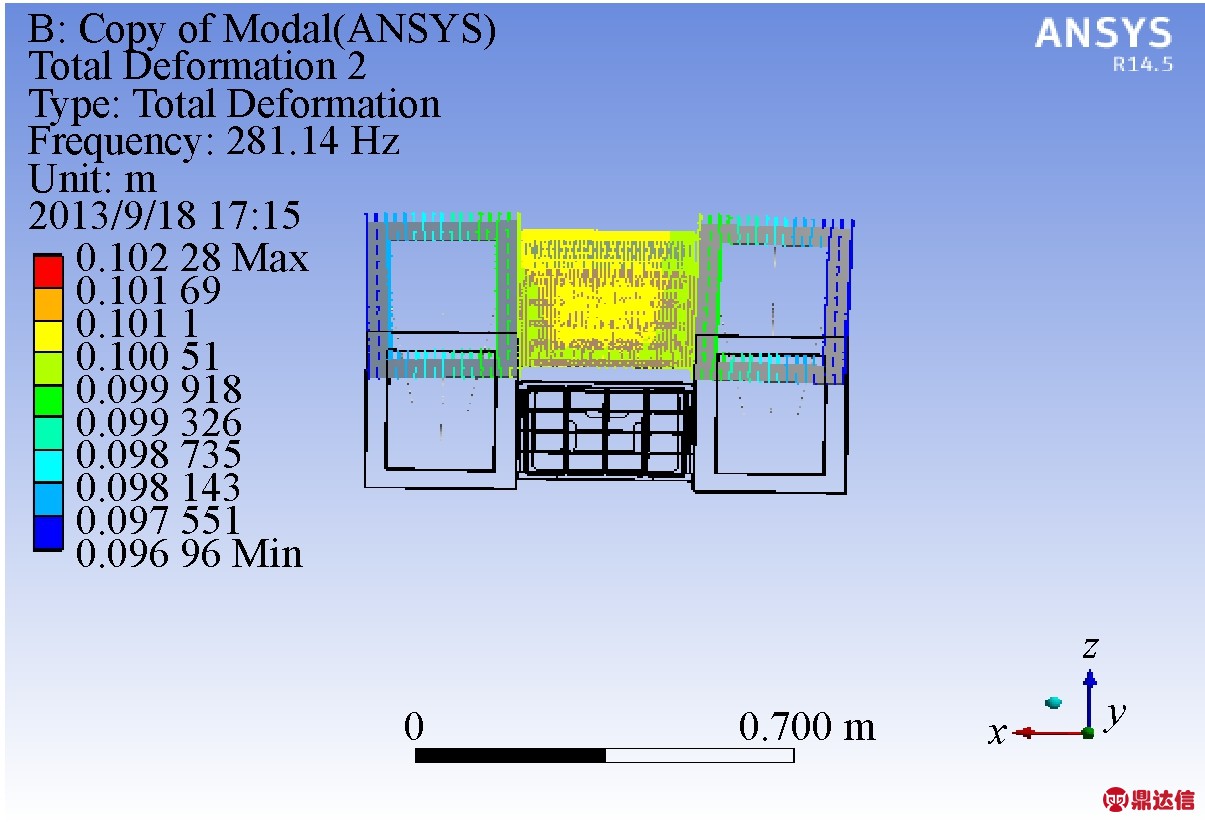
(b) 整体X向平动

(c) 整体Z向转动
图6 仿真结果
4 实验验证
为验证仿真结果的可靠性,进行系统的振动分析实验。使用VIBER X5,采样线数为1 600,采样周期为1 s,频率采集范围为0~1 600 Hz。由于工作台放置于一个较大的花岗岩气体静压平台上,采用双通道测量,同时记录花岗岩气体静压平台以及承载台的响应,激励点选在气体静压平台及承载台的不同位置上,在激励点用橡胶力锤进行Z向激励,实验得到频响函数如图7所示。
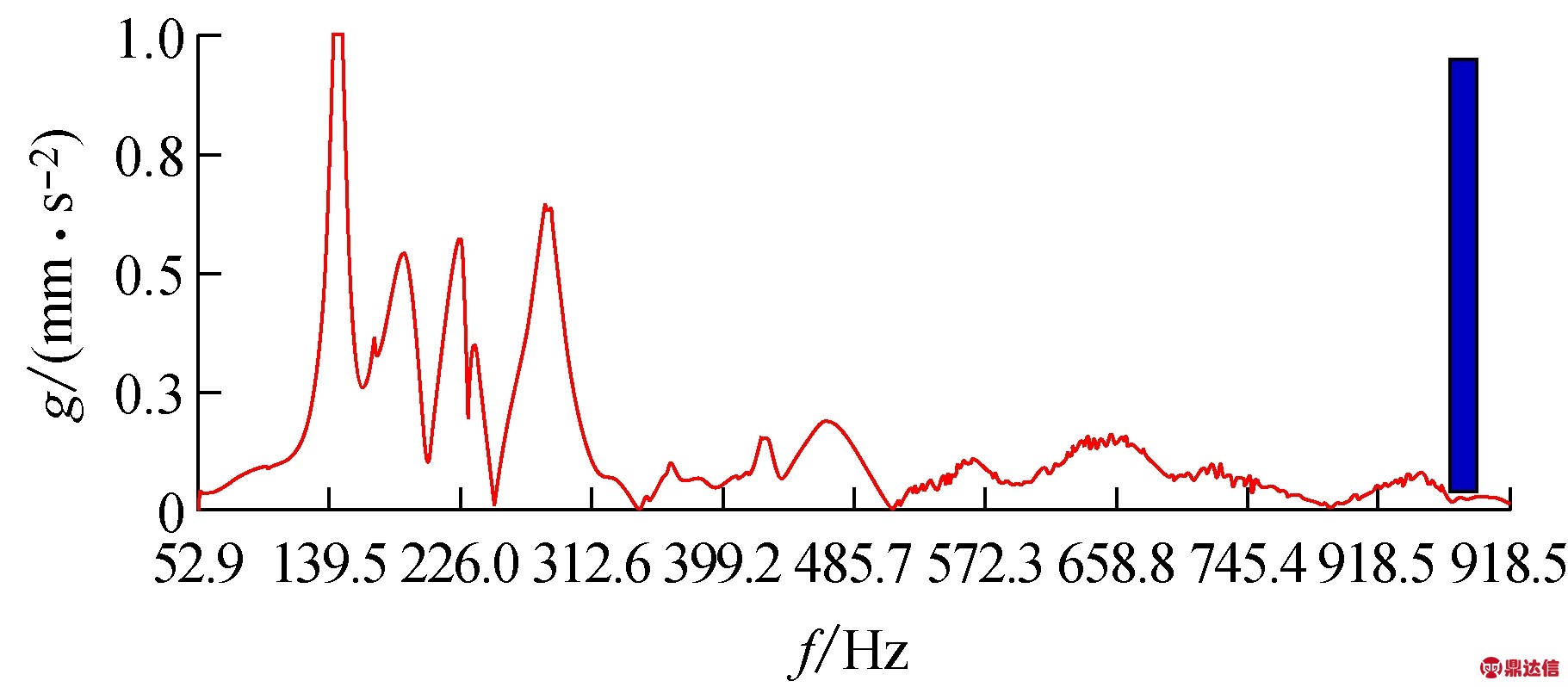
图7 振动分析仪实验结果
仿真结果与实验结果相比较如表2所示。
表2 结果对比
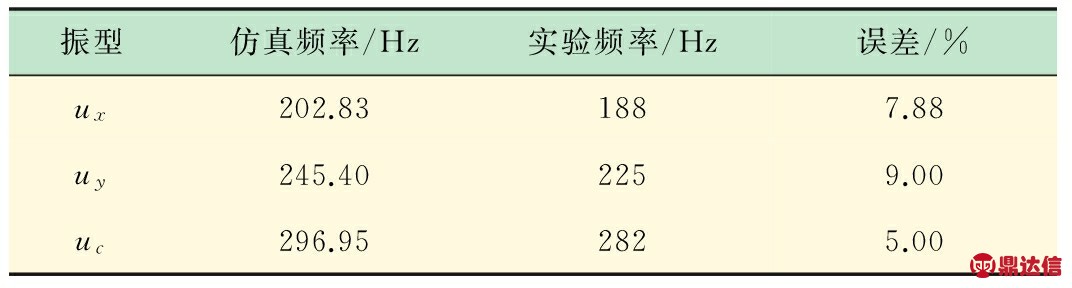
经过多次实验验证,146 Hz是花岗岩光学隔振平台本身的固有频率,不属于工作台结构频率。在实际工况中,刚体A应具有6阶模态,但由于驱动系统对刚体A的约束,使其前3阶振动频率为0,表2中的三阶振动是由两个闭式导轨产生的,主要峰值的相对误差都在10%以内。仿真和试验的结果基本一致,证明力学模型和仿真模型的处理方法是可行的,振动特性分析的计算结果可靠。 基于力学模型建立仿真模型的方法大大简化了仿真模型的分析过程。
5 结 语
气体静压系统的隔振效果在于高频范围,其模态特性符合超精密工作台系统的结构要求。本文中的实验为光栅刻划机的动态传递特性提供了初步实验数据,为优化设计提供了基础数据。所采用实验方法对工作台类结构系统进行模态实验有一定参考作用。


