
摘要:设计了某型总装导轨平台,并采用ANSYS有限元分析软件对车体两轮在导轨支脚中间位置时导轨平台变形最大、受力最恶劣情况下的强度和刚度进行分析,得到导轨平台的应力云图和变形云图,表明其强度及刚度满足设计要求,使用安全可靠。
关键词:ANSYS;强度;刚度;导轨平台
0 引言
随着海洋资源开发的不断深入,水下机器人承担的任务越来越多,并逐渐向大型化、重型化发展。在大型、重型水下机器人组装过程中,由于其结构复杂,各密封舱段需要由各种多自由度的装配台车支撑完成装配,而装配台车需要搁置在导轨上以便于装配台车的轴向移动,为此设计了总装导轨平台。为了保证总装导轨平台的强度及刚度,采用ANSYS有限元分析软件对其强度及刚度进行了分析。
1 总装导轨平台的设计
某型水下机器人单节导轨平台长度为2 m,使用时可根据所需装配的水下机器人长度由数节导轨组装连接成一长段导轨(相互之间采用夹板连接)。导轨平台主要由导轨、导轨框架及支脚等组成,导轨采用304不锈钢,导轨框架采用Q235材料。所有导轨平台结构一致,能进行互换,其三维效果图如图1所示。
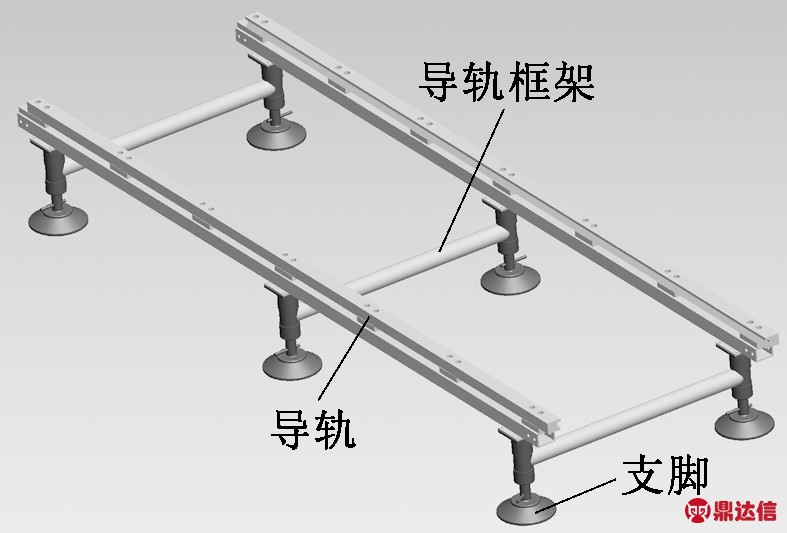
图1 导轨平台三维效果图
导轨底部设置3组可升降的支脚,用于导轨的调平,支脚表面进行镀铬处理。考虑到导轨运输,在支脚下部设置略大于导轨宽度的滑槽,方便运输时的叠放、左右定位,同时在每根导轨上开6个M8的螺纹孔,用于连接码垛时的上下定位,以此增加导轨码垛运输稳定性。螺旋支脚三维效果图如图2所示。
2 导轨平台螺旋支脚设计计算
每段导轨平台承载能力最少8 t,按6个支脚支撑导轨设计,则分到每个丝杠的负载为1.33 t,考虑不平衡因素,取安全系数为2,则每个支脚的计算负载Fs=2.66 t。丝杠采用40Cr材料,其公称直径ds=36 mm,螺距ps=6 mm,则丝杠螺纹的中径dS2=33 mm;螺母材料为45钢。
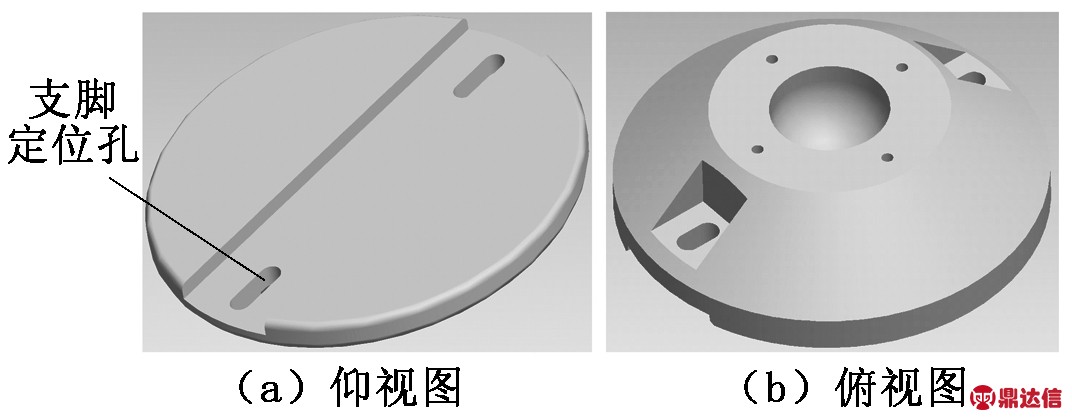
图2 螺旋支脚三维效果图
2.1 确定螺母的厚度(即旋合长度)
螺母厚度的计算公式为:
HSLmin=φSdS2.
(1)
其中:φS为螺母系数,螺母采用整体式,查手册得φS=1.5。
将数值代入式(1)计算得:HSLmin=49.5 mm。考虑到总体结构,取螺母长度HSL=80 mm。
螺纹旋合圈数为:
ZS=HSL/ps.
(2)
将数值代入式(3)计算得:γs1=4.73°。
2.2 丝杠螺母自锁校核
螺旋副当量摩擦角γs1计算公式为:
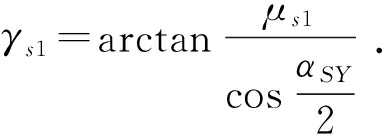
(3)
其中:μs1为摩擦因数,螺旋副的摩擦因数为0.08~0.1,此处取μs1=0.08;αSY为牙形角,此处αSY=30°。
其中:dS1为螺杆小径,dS1=29 mm;bS为螺纹牙底宽度,梯形螺纹bS=0.65ps=3.9 mm。
本设计的丝杠螺旋升角![]() 由γS<γs1可知此丝杠自锁。
由γS<γs1可知此丝杠自锁。
2.3 螺纹强度校核
由于丝杠轴向载荷为26 600 N,则螺纹牙承受的轴向力FS=26 600 N。
(1) 丝杠螺纹牙受到的剪切应力为:
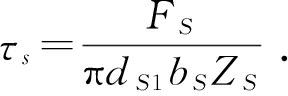
(4)
将数值代入式(2)计算得:ZS=13.3。
将数值代入式(4)计算得:τs=5.63 MPa。丝杠采用40Cr材料,其许用剪切应力[τs]=30 MPa。τs<[τs]=30 MPa,螺纹牙受剪应力满足要求。
(2) 丝杠螺纹牙受到的弯应力为:
![]() .
.
(5)
其中:HSS为螺纹的工作高度,HSS=ps/2=3 mm。
将数值代入式(5)计算得:σSb=13 MPa。40Cr的许用弯应力[σsb]=40 MPa,σSb<[σSb]=40 MPa,螺纹牙受弯应力满足要求。
同理可得,螺母受的剪应力和弯应力也满足要求。
3 基于ANSYS的导轨平台有限元分析
图3为导轨受力简图。经分析可知,当车体两轮在导轨支脚中间位置时,导轨平台变形最大,受力情况最恶劣。
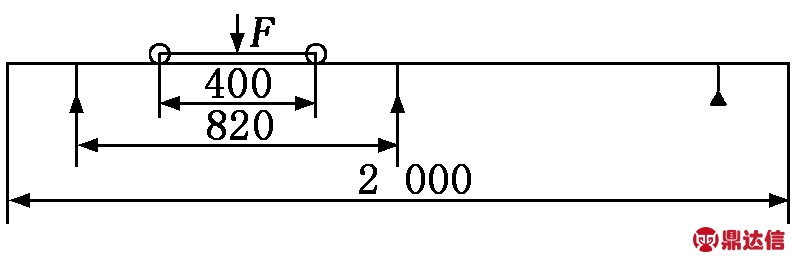
图3 导轨受力简图
按每段导轨承载9 t设计,对导轨按照图1所示建模进行有限元分析计算。在有限元计算中取单位量级为N(牛)、mm(毫米)、MPa(兆帕)、t(吨)。经计算,当车体两轮在导轨支脚中间位置时,导轨平台应力云图和变形云图如图4和图5所示。
由图4可知,最大应力为226 MPa,位于载荷施加位置和建模时形成的局部应力集中处,不具参考意义;导轨平台整体应力在86 MPa~95 MPa之间,而304不锈钢屈服应力大于200 MPa,Q235屈服应力为235 MPa,取2倍安全系数,经计算导轨平台满足强度要求。由图5可知,导轨平台最大变形0.26 mm,满足刚度使
用要求。
4 结束语
本文设计的导轨平台,解决了目前导轨不同地面适应性不强的问题,为水下机器人装配台车提供了可供轴向移动的导轨。本导轨平台已在某水下机器人总装平台中实际应用,经加载试验和使用验证,其强度及刚度满足设计要求,使用安全可靠。

图4 导轨平台应力云图
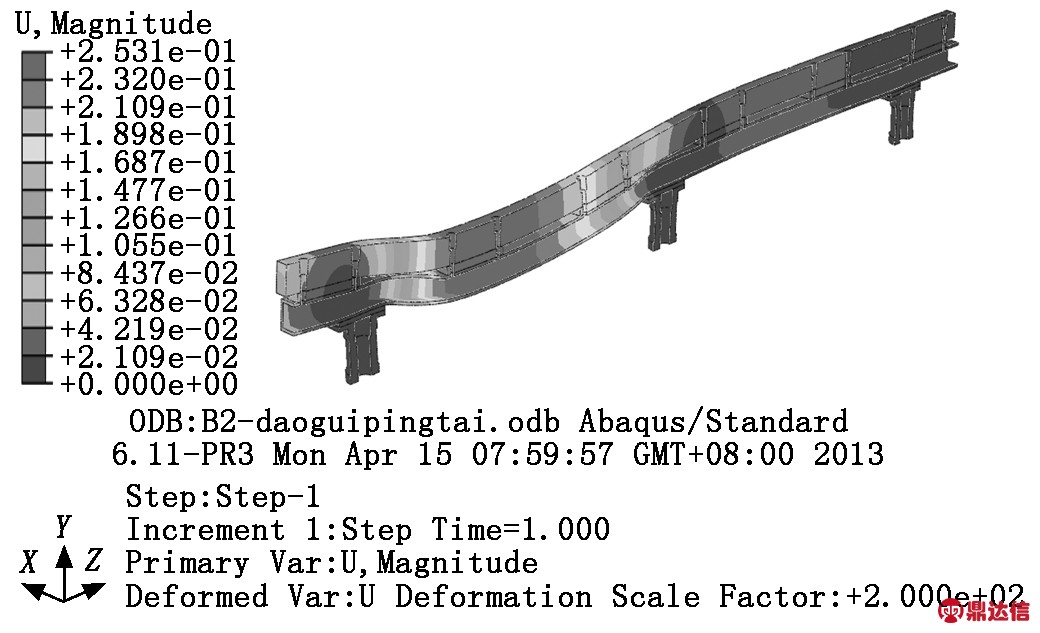
图5 导轨平台变形云图


