
摘 要:通过利用三维软件Pro/E建立四工位胶装机模型并导入Adams中,然后设置约束条件进行运动学仿真。在Adams中建立丝杠导轨机构的动力学模型,最终导入Matlab/Simulink模块。在SIMUlink中建立控制系统,以气动速度为输入指令,调整控制参数,实现对Simulink仿真的输入指令、偏差信号等波形的分析总结。仿真结果表明系统具有良好的动态响应特性。
关键词:胶装机;Pro/E;ADAMS动力学模型;Simulink联合仿真
0 引言
随着我国电力事业的急剧增长,促进了电力电容器与高压电瓷制造业蓬勃发展。这也导致我国对电瓷绝缘子的消耗与日俱增,使得我国成为世界上电瓷产品发展最快和最具市场潜力的国家。胶装机是高压电瓷行业中不可缺少的设备,用于电器绝缘瓷套两端钢法兰的胶装,是胶装电瓷绝缘子的专用设备。国内仍有部分生产瓷绝缘子的电瓷厂家采用纯手工方式完成瓷绝缘子胶装的全部工序,面向高端的超高压电瓷绝缘子的研制,我国还依然受制于技术与装备水平,无法满足我国电力工业对超高压电网对绝缘子质量的需求。因此对高性能的自动胶装机的开发显得尤为重要。目前,通过不断的探索和科学研究并在实践过程中吸收国外的先进技术,我国电力行业制造装备已经逐步实现胶装机的研发及制造的国产化[1,2]。
1 胶装机方案设计及工作原理
1.1 设计方案
虚拟样机技术(简称VPT)是一种全新的机械设计方法[3,4],作为一项计算机辅助工程(CAE)技术于上个世纪80年代出现并在90年代以后得到了迅速发展,直接将机械设计提升到智能化程度。虚拟样机技术是针对于传统的设计方法而言,在机械设计技术不断创新的条件下,可以直观形象地对虚拟样机进行方案优化、性能检测,避免设计错误,从而节约机械装置从设计到生产整条生产链中的成本。机械系统的研究可分为静力学、运动学和动力学3种类型,而虚拟样机技术主要进行的是机械系统运动学和动力学分析,因此也被称之为机械系统动态仿真技术。目前已在航空航天、国防工业、汽车制造业和工程机械等领域得到广泛应用,包括建模、仿真、优化、系统集成和模型管理五个方面[5]。Adams软件是专门用于机械产品虚拟样机开发方面的工具,通过Adams建立虚拟物理模型,进行试验和调试。Adams软件具备强大的建模、仿真环境功能,能够用于许多种机械系统的建模、仿真和分析实验。Adams虚拟模型能够良好地反映工程实际当中物理模型的特性,其仿真结果和实际物理模型的结果基本吻合,然而Adams软件的控制工具箱存在功能不足,因此需要结合Matlab中的Simulink模块进行联合仿真,从而实现两者的优势互补,为机械系统控制研发提供很多便利。
本文根据高压电磁企业对设备的要求,针对胶装需要的压力大、平行度要求高的特点结合虚拟样机技术分析设计胶装机。①在Pro/E软件中建立完整的三维模型;②将简化后的三维模型导入Adams中,添加约束和驱动,进行运动学仿真并形成运动轨迹;③建立Adams动力学模型,并导出Simulink可读文件类型;④在Simulink中建立关于动力学模型的控制系统;⑤调节控制参数,实现既定轨迹的跟踪,输出波形并分析。
1.2 工作原理
胶装机用于电器绝缘瓷套两端钢法兰的胶装,它主要由底座、床身、压头、上下定位盘、数显装置、电气控制柜等组成。为了提高胶装机的抗压性、减震性及耐磨性,底座、床身、压头均采用铸铁铸造。压头在床身的上的燕尾形导轨上可以实现滑动,通过压头上的塞铁可以调整与导轨之间的间隙。床身上的滚珠丝杠旋转驱动装有丝杠螺母的压头使其在导轨上滑动。本设计保证了钢法兰相对绝缘瓷套压紧的精度与稳定性。利用三维软件设计胶装机如图1所示。
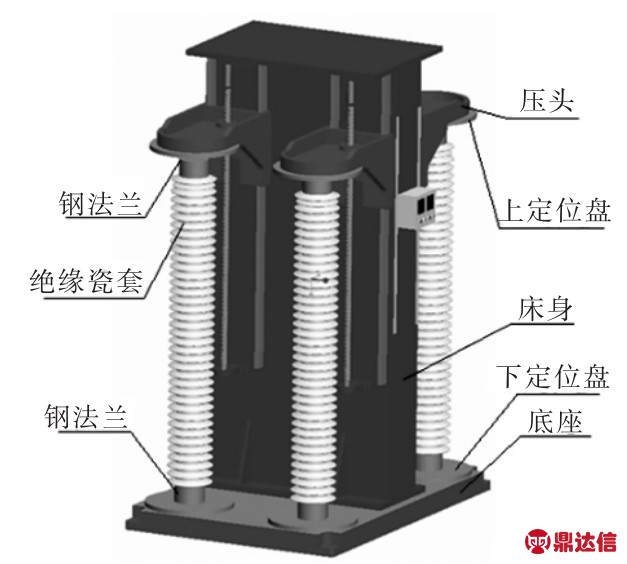
图1 四工位胶装机三维方案图
Fig.1 The 3D graph of four-station cementing machine
胶装机的工作流程为:①通电,检查电源、仪表指示正常;②手摇操作手柄,将压头升降至合适的高度;③定位放置下法兰在下定位盘上,并放入瓷件;④打开“电磁开关”,使上法兰定位盘带磁性;⑤将上法兰定位吸附在上定位盘上;⑥手摇操作手柄,下移上法兰,观察数显装置,到达工件高度尺寸后停止手摇,同时观察标尺高度显示与数显是否一致;⑦胶装完后,关闭“电磁开关”,操作手柄,将压头升至合适高度,取出工件或翻转胶装另外一端法兰。
2 运动学仿真及动力学建模
2.1 仿真模型建立
本次胶装机的建模采用Pro/E三维绘图软件,该三维模型与后续的动力学建模软件Adams在零件互转上具有很好的兼容性。胶装机包含四个工位,每个工位由一套丝杠导轨机构组成,如图2所示。减速电机带动丝杠旋转,驱动压头在床身的导轨上滑动。由于四套机构结构相同,因此只需要分析其中一套机构即可。丝杠导轨机构的工作参数包括很多,比如承载能力、重复定位精度等。该机构的自由度数为 1,外形尺寸(1500×300×650)mm,工作范围0~1500mm,最大速度m/min。
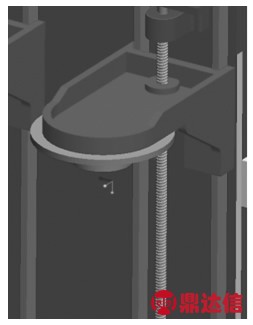
图2 丝杠导轨机构
Fig.2 Lead screw and guide mechanism
为了分析方便,将Pro/E中的模型做以下简化处理:一是去掉螺钉、螺栓、螺母、键等质量很小的零件;二是去掉各个关节连接的轴承等对模型的转动惯量影响较小的零件,保留电机等质量较大的零件;三是将不运动的零部件使用连接重组命令合并成单个零件。在建立虚拟样机前,需要设置Adams工作环境,包括设置坐标系、单位制、重力加速度大小和方向等。
(1)坐标系的设置可通过菜单 Setting→Coordinate ystem,弹出坐标系设置对话框,选择Cartesian,即笛卡尔坐标系,也是Adams/View默认的坐标系。
(2)选择统一的单位制有利于快速准确地进行建模分析,单击菜单Setting→Units,弹出单位设置对话框,这里选择MMKS单位制,即长度为毫米,质量为千克,力为牛顿,时间为秒,角度为度,频率为赫兹。
(3)动力学建模中,零部件的重力是不可缺少的重要参数,因此在此之前必须设置重力。单击菜单Setting→Gravity,弹出重力加速度设置对话框,默认的方向为负Y方向,大小为9806.65mm/s2,点击OK即可。
2.2 运动学仿真
分析胶装机的工作过程,须定义压头与床身之间的移动副。选择主工具箱的Joint:Revolute命令,主工具箱下方的Construction项设置为2Bod-1Loc和Pick Feature,前者表示选择两个构件和一个连接位置点,运动副被固定在第一个构件上,相对于第二个构件运动;后者表示选择特征以确定矢量方向来定义运动副的方向。将床身、底座各部分的零件均固定在一起,压头与床身用移动副连接。固定副的操作为:点击工具箱的Joint:Fixed,然后选择Construction的形式为2Bod-Loc,Pick Feature,然后选择要固定到一起的两个零件,再选择固定位置即可。胶装机的Adams动力学模型如图3所示,需要给每个零件定义材料。操作方法为:在需要定义的材料的零件上右击,选择Part:*,其中*为零件名,再选择Modify,在Define Mass By栏选择Gemery and Material Type,在Material Type处右键Browser选择材料即可。由于后面的联合仿真需要跟踪轨迹,需要在此形成轨迹,以便在Simulink里作为信号输入。利用Build→Measure创建测量,以便运动学仿真时能够实时的测量。创建驱动里使用的是移动驱动,这是应用于移动副上的运动,选取建模时已定义的移动连接,会在旋转连接处出现一个MOTION图标,箭头方向表示正向。点击主工具箱的Interactive Simulation Controls,设置仿真时间为 10s,步数为200步。仿真结束后,进入后处理模块,得到仿真过程中压头位移、速度和加速度的变化曲线,如图3所示。
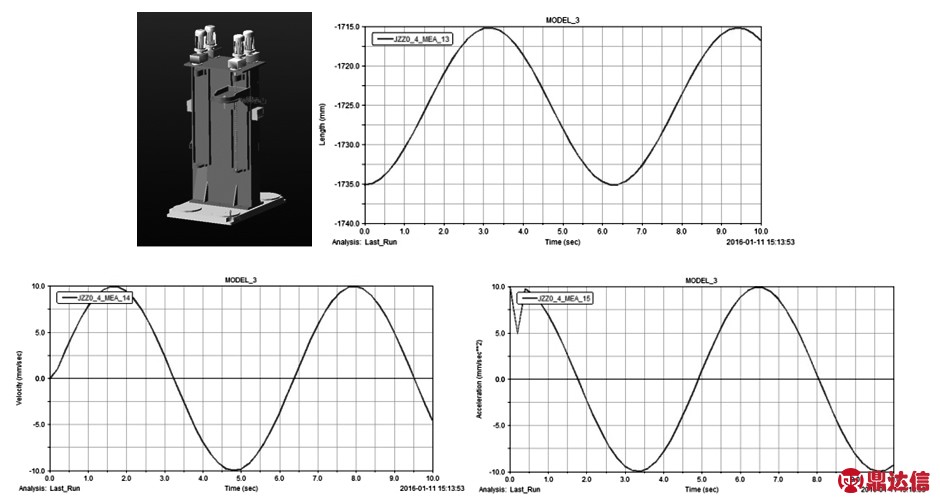
图3 胶装机Adams模型及其压头位移、速度和加速度曲线图
Fig.3 The Adams model of cementing machine and the displacement,speed and acceleration curve diagram of the indenter
2.3 动力学建模
动力学建模是联合调试的基础,联合调试过程较为复杂,对动力学建模有较高的要求。联合调试只针对丝杠导轨,在Adams中建立丝杠导轨上一个点的轨迹。
(1)创建输入变量。创建输入状态变量,选择创建→系统单元→状态变量→新建,输入变量名为control_force_1,F(time)一栏为0,表示控制力的数值将从控制软件的输出获得。在Adams图形窗口中,右键单击SFORCE_1,选择Modify,在Function一栏定义为VARVAL,以实时从状态变量control_force_1中接收力矩的数值。确定输入变量,择创建→数据单元→机械系统→机械系统输入→新建,在变量名称中用右键选择创建的control_force_1变量,点击确定即可。
(2)创建输出变量。创建输出变量,选择 创建→系统单元→状态变量→新建,输入变量名为 S,F(time)一栏为UZ(MARKER_2,MARKER_1,MARKER_1),表示压头位移变化;输入变量名为 u,F(time)一栏为 VZ(MARKER_2,MARKER_1,MARKER_1),表示压头速度变化;输入变量名为 a,F (time) 一栏为 ACCZ(MARKER_2,MARKER_1,MARKER_1),表示压头加速度变化。
确定输出变量,选择创建→数据单元→机械系统→机械系统输出→新建,在“变量名称”中用右键选择创建的变量,点击确定即可。
3 Adams/Simulink联合仿真
胶装机的联合仿真是基于Adams与Matlab的接口模块Adams/Control,利用Matlab/Simulink模块搭建机构的联合仿真系统,实现基于Adams和Matlab的胶装机联合仿真,此种仿真极大地提高了机构的设计效率。在搭建联合仿真系统过程中,通过调节控制系统的参数,实现了既定轨迹的跟踪。
3.1 联合仿真的创建
将Matlab软件的工作目录调整到一起,在命令窗口输入模型名称,建立如图4所示的Simulink模型。新建一个Simulink文档,将图中的“adams_sub”模块拖入,构建丝杠导轨机构的控制系统。添加位置环设计算法,采用负反馈的方式进行调节。控制系统的如图5所示,示波器用于方便观察各个部分的信号变化,调节参数,方便比较。双击“adams_sub”模块,弹出如图6所示的子模型。
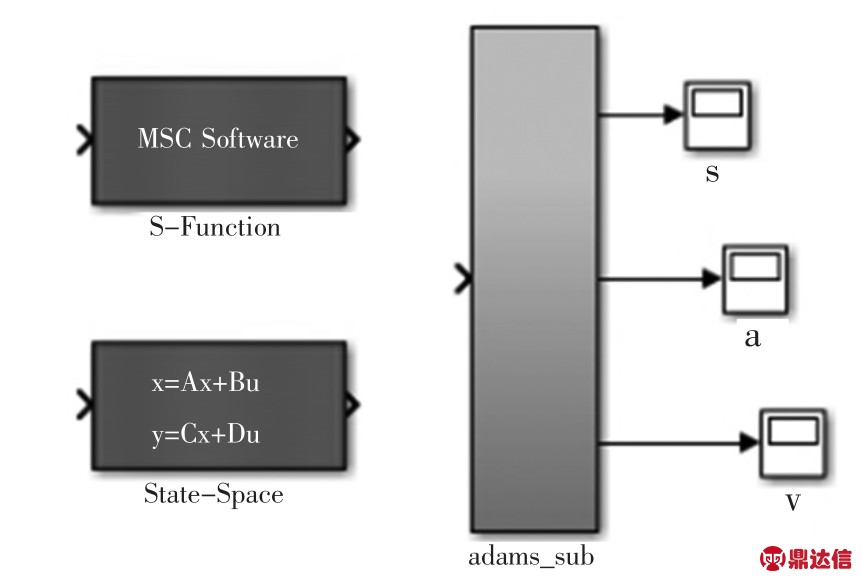
图4 Simulink模型
Fig.4 Simulink model
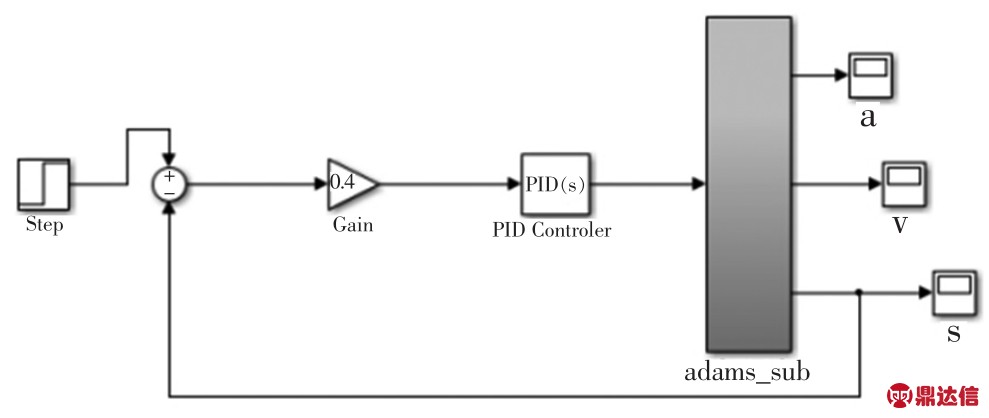
图5 联合仿真控制系统
Fig.5 Joint simulation control system
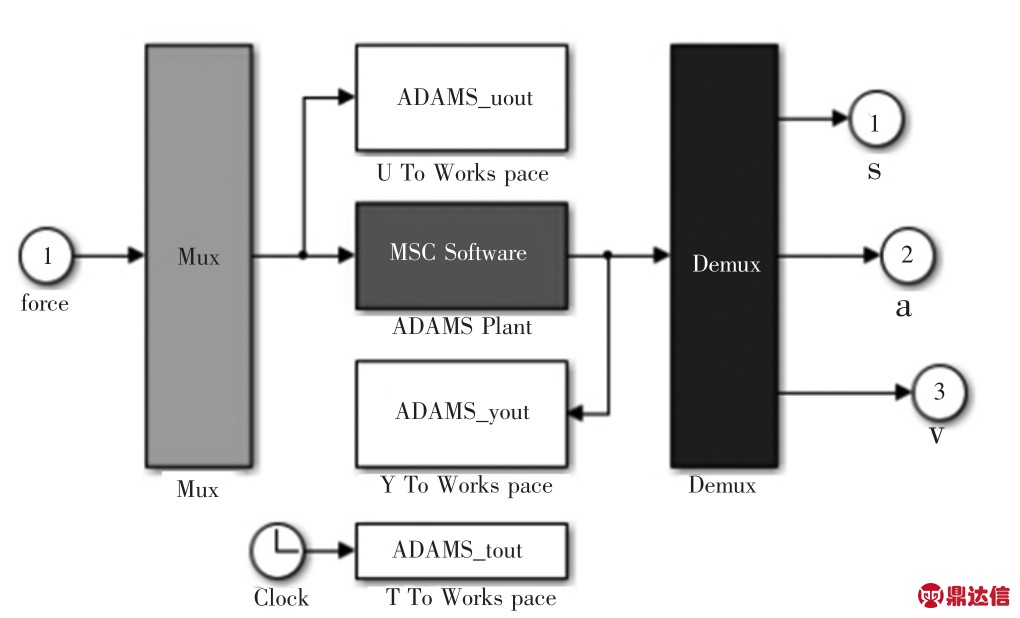
图6 Adams_sub子模型
Fig.6 Adams_sub sub model
双击子模型中的ADSMS Plant,出现如图7所示的联合仿真子模型设置界面。选择Animation mode为interactive,即交互模式,表示联合仿真时Adams软件将以图形界面的方式显示,可以观察丝杠导轨机构的运动情况。选择Simulation mode为discrete,即采用离散方式仿真,机械系统动力学模型的求解由Adams提供的求解器计算,控制系统则由Matlab提供的求解器进行计算。设置仿真时间为10秒,求解算法为ode45,其他默认。至此,联合仿真的全部设置完成。
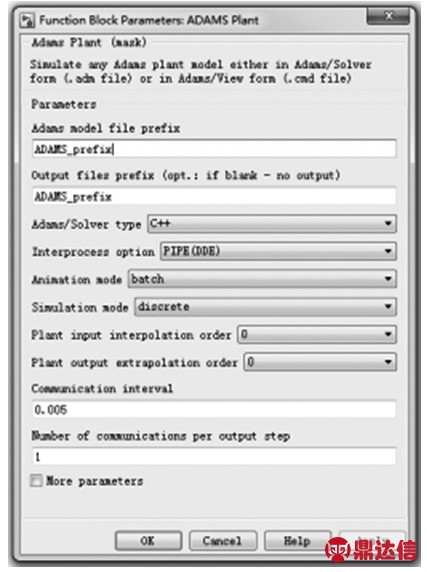
图7 联合仿真子模型设置界面
Fig.7 Joint Simulation sub model setup interface
3.2 联合仿真分析
单击Simulation菜单下的Start命令,开始进行联合仿真,并调出Adams模型实时显示模型的变化。各示波器实时显示所测数据的变化曲线。
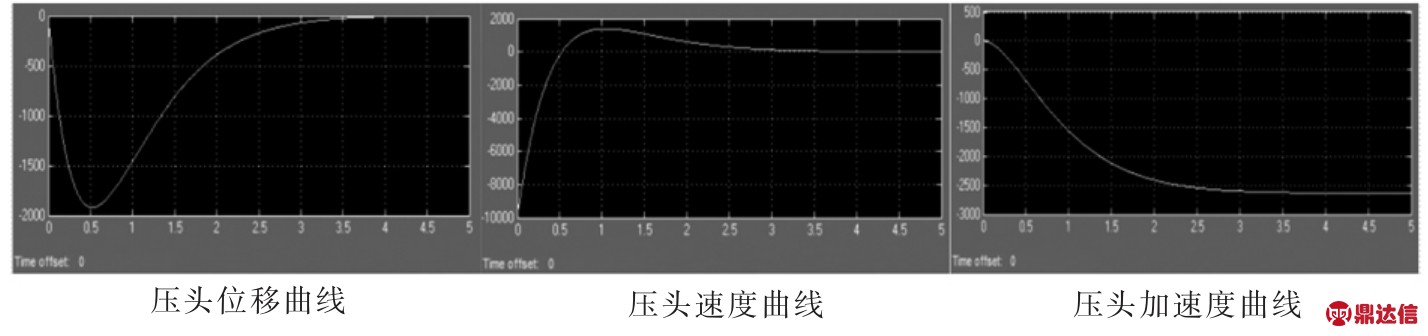
图8 联合仿真响应曲线
Fig.8 Joint Simulation response curve
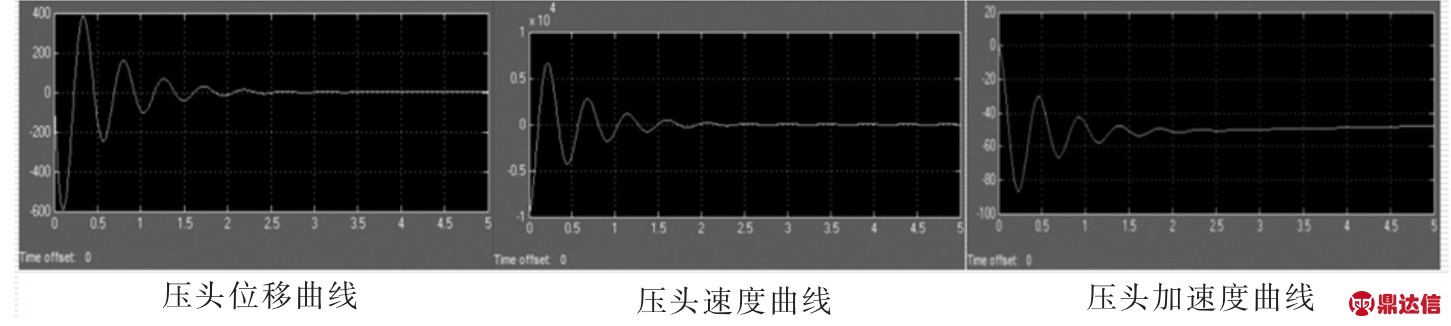
图9 调整参数后联合仿真响应曲线
Fig.9 Joint Simulation response curve after adjusting parameters
胶装机是一种机电耦合系统,因此仿真过程中需要对控制参数作出调整,通过调整参数实现系统的快速响应。当调整位置环I为50时,从图9可以看到系统的响应明显变快。因此通过改变控制系统的参数可以为实际数控系统的机电耦合提供了设计依据。
4 结论
胶装机的丝杠导轨机构是一种非线性机电系统。本文利用Adams虚拟样机对该机构进行了运动学和动力学仿真,将动力学模型导入Matlab/Simulink中,建立了联合仿真控制系统。通过PID参数整定以及联合仿真,验证了翻转机构系统的可行性,仿真过程中获得的设计参数,有助于物理样机的设计与研制并能够解决类似的并联机构控制问题。从仿真结果可分析得出,该丝杠导轨机构满足了设计要求,得到了比较理想的设计方案。后续仍然存在很多关键问题需要研究,比如,机械结构的变化引起的系统变化规律,不同的控制系统对机械系统的影响,不同的控制参数作用下,系统具有怎样的变化规律。


