
摘 要:针对滚动直线导轨副精度保持性问题,对滚动直线导轨副精度保持性的测量方法与系统实现进行了研究。基于布尔沙-沃尔夫模型对精度的检测方法进行了分析。设计了试验台测试系统的硬件和软件,并对测试结果的数据分析进行了介绍。该测试系统的设计为滚动直线导轨副精度保持性试验提供了软硬件基础。
关键词:滚动直线导轨副;测试系统;硬件设计;软件设计
0 引言
滚动直线导轨副具有定位精度高、动静摩擦系数小、精度保持性高等优点[1],作为机床和机械装置中的导向承载部件,能在保证机床和机械装置的运行精度的同时降低驱动功率消耗,已成为高速精密数控设备的一个关键功能部件[2]。然而,高精度保持性的滚动直线导轨副80%以上依赖进口,严重影响到我国高端数控装备的自主研发与国产化[3]。针对这种现状,设计出滚动直线导轨副精度保持性试验台,在此基础上对试验台的测控系统进行了设计与分析。
1 精度保持性测量方法
1.1 精度检测方法
滚动直线导轨副的精度检验主要检测滑块移动对基准面的平行度:1) 对导轨底面基准A的平行度;2) 对导轨侧面基准B的平行度。将直线导轨紧固在专用平台上,专用表架的一侧平面紧靠在直线导轨的侧面基准上,在专用表架上固定指示器,使其测头触及:a)滑块顶面中心处;b)与导轨侧面基准B同侧的滑块侧面中心处,如图1。移动滑块与专用表架,在导轨全长上检测。a)、b)误差分别计算,误差以指示器读数的最大差值计[4]。
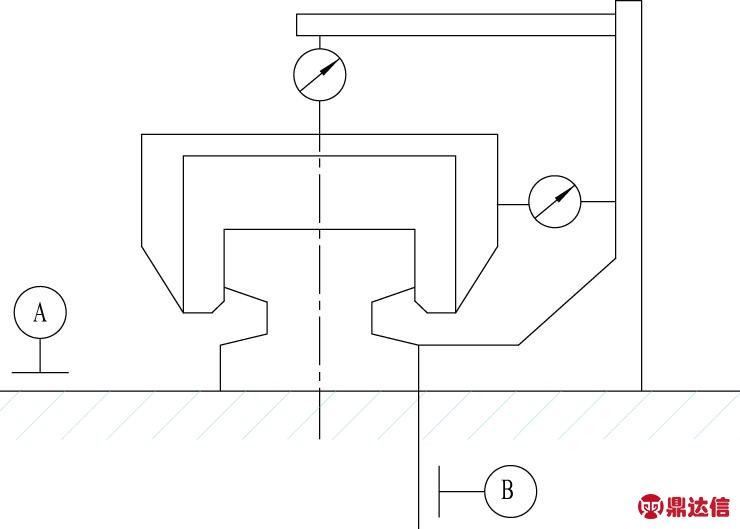
图1 导轨基准简图
1.2 平行度变化测量与分析
导轨直线度误差是被测导轨实际线对其理想直线的变动量[5]。滚动直线导轨副在使用一定时间后,导轨、滑块及滚动体之间会产生接触变形和磨损,导致滚动体接触角改变及滑块位移。以滑块几何中心处为原点,分别以垂直滑块侧面、顶面、端面为X、Y、Z轴建立基准坐标系,假设基准坐标系在X轴和Y轴方向有偏移,并绕Y轴和Z轴产生偏转,如图2所示。根据精度的检测方法,在X轴和Y轴的偏移ΔX、ΔY即为平行度的变化量,在导轨全长上测得的ΔX、ΔY中,最大的变化量即为滑块对基准面的平行度。
因此,可根据布尔沙-沃尔夫模型[6-7]对偏转后的坐标系与基准坐标系建立联系。试验中,滑块相对于导轨的偏转根据布尔沙-沃尔夫模型可由以下几步完成:
1) 以Z’轴正方向看,以O’为固定旋转点,将O’-X’Y’Z’绕Z’轴旋转φ,使经过旋转后的X”与XOZ面平行;
2) 以Y”轴正方向看,以O’为固定旋转点,将O’-X”Y”Z”绕Y”轴旋转δ,使经过旋转后的Z”与YOZ面平行;
3) 将O’-X#Y#Z#的原点分别沿X#、Y#和Z#轴移动ΔX,ΔY,O,使其与基准坐标O-XYZ的原点重合。
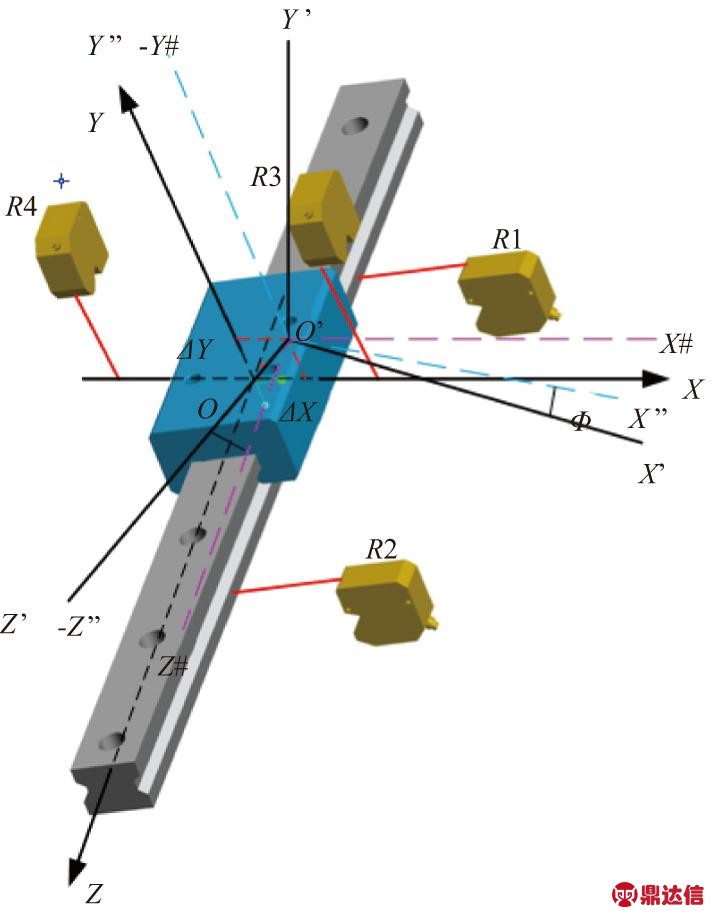
图2 导轨副偏转示意图
因为试验中ωX、ωY、ωZ都是小角度,因此sinω≈ω,cosω=1,由布尔沙-沃尔夫坐标转化模型可知,如图3。
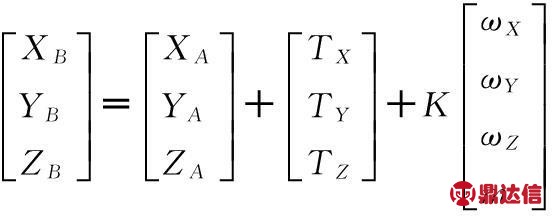
(1)
其中:
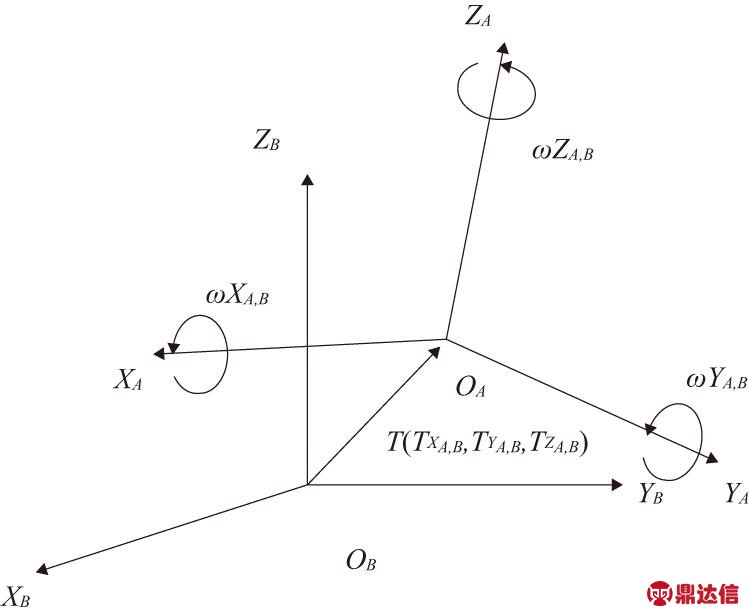
图3 布尔沙-沃尔夫模型示意图
在滚动直线导轨副精度保持性试验中ωX=φ,ωY=0,ωZ=δ,TX=0,TY=ΔX,TZ=ΔY,m=0,因此式(1)可转化为:
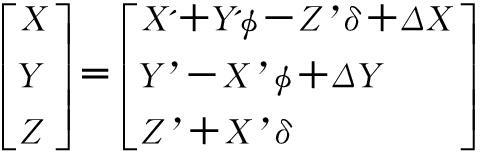
(2)
根据激光位移传感器安装的几何关系,可得:
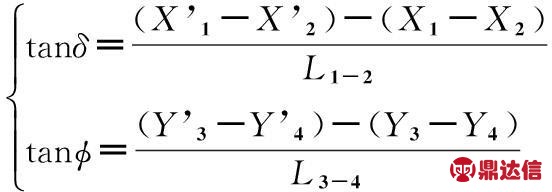
(3)
其中:L1-2——位移传感器R1、R2激光间的距离;
L3-4——位移传感器R3、R4激光间的距离;
X1-X2——传感器R1、R2初始测量值之差;
Y3-X4——传感器R3、R4初始测量值之差。
因此,由式(2)和式(3)可得平行度变化量ΔX、ΔY和转角变化量φ、δ,分别取其最大值即为滑块对基准面的平行度。
2 测量系统机械系统结构
滚动直线导轨副精度保持性试验台由南京理工大学自主研发,主要包括支撑结构、驱动机构、加载机构、润滑装置、防撞装置等[8],如图4。2根被测导轨副安装在两侧的转接板上,转接板可根据不同的导轨型号进行更换,采用对称加载机构模拟实际工况对被测导轨副进行侧向加载。滑块工作台面配置4个位移传感器和2个振动传感器,实时测试导轨副2个方向精度变化情况以及精度丧失时的振动信号,以提取精度丧失特征。
图4 滚动直线导轨副精度保持性试验台
3 测量系统硬件设计
3.1 测控系统的基本组成
滚动直线导轨副精度保持性试验台的测控系统主要包括控制系统和测试系统,具体组成如图5。
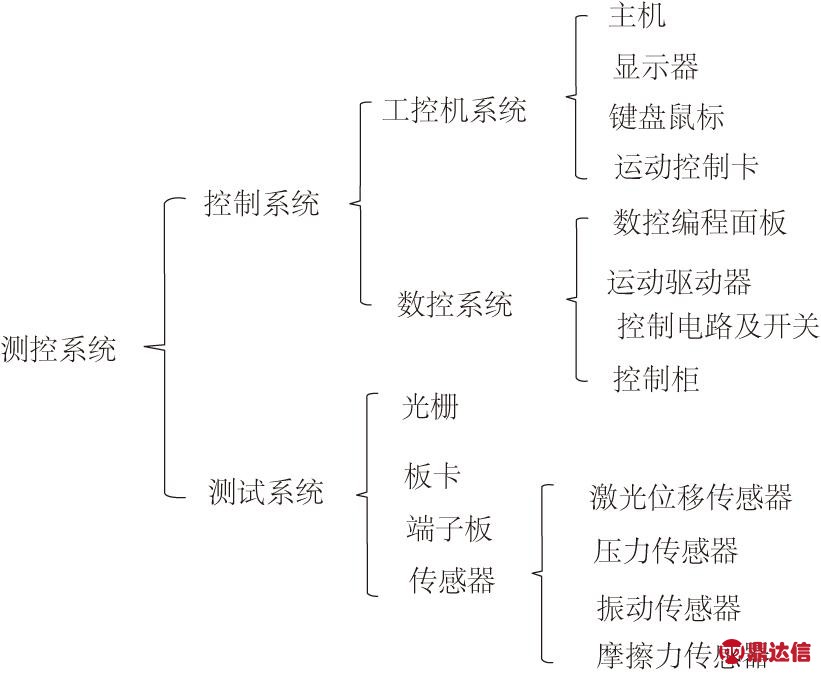
图5 测控系统硬件基本组成图
3.2 运动控制系统
试验台的运动控制系统由数控系统、伺服电机、伺服驱动器、齿轮齿条机构、限位开关等部分组成。试验台在不同阶段以不同的当量速度长期往复运动,数控系统可以控制龙门的行程、速度、加速度等,能够使龙门按照一定的要求往复运行。当实验台出现紧急情况,超出预期的行程时,龙门首先会碰到数控系统内部设置的2个软限位开关停止运动;若软限位开关同时失效,龙门继续前行会碰到床身两侧的硬限位开关,并可向数控系统发出信号,使伺服电动机停止转动,如图6。
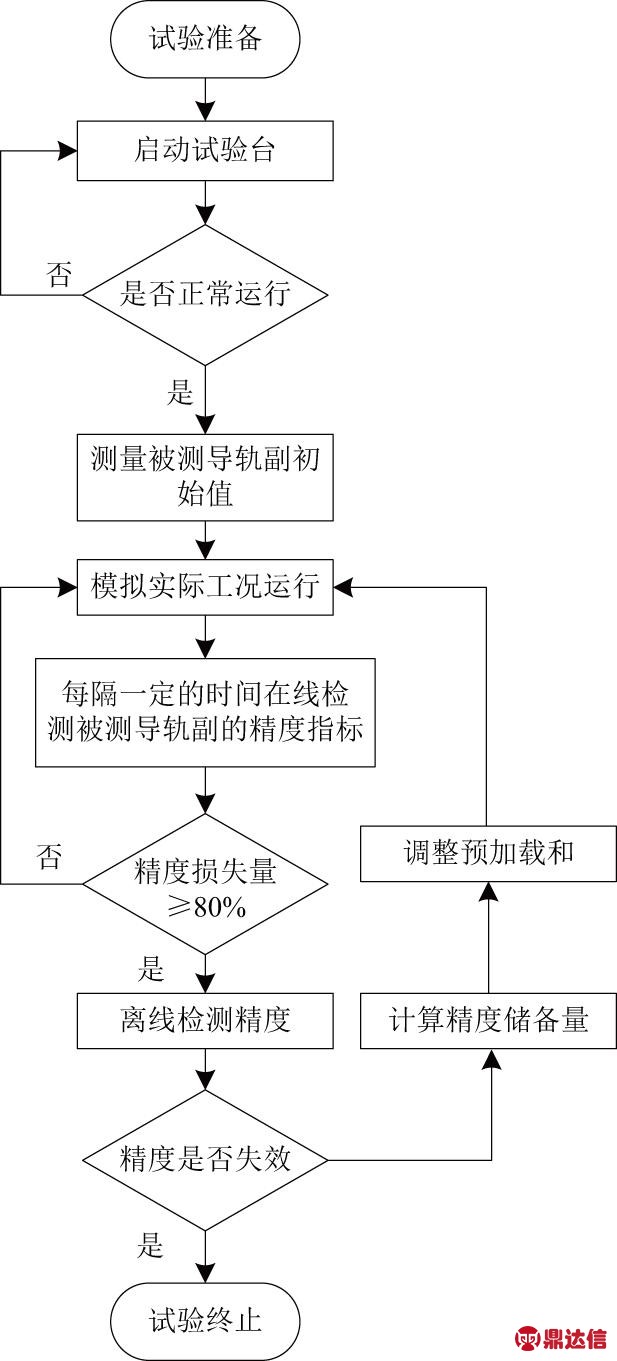
图6 运动控制系统硬件框图
3.3 加载力控制系统
试验台的加载控制系统由加载伺服电动机、伺服驱动器、工控机、运动控制卡、A/D采集卡、压力传感器等部分组成。试验台需要模拟实际工况对被测导轨副进行加载,这种加载通过工控机控制固高运动控制卡驱动加载伺服电动机来完成,并由2个压力传感器对加载力进行实时监测和反馈。当施加的载荷超出允许范围时,力传感器将信号反馈给工业控制计算机,进而对加载力进行调整,如图7。
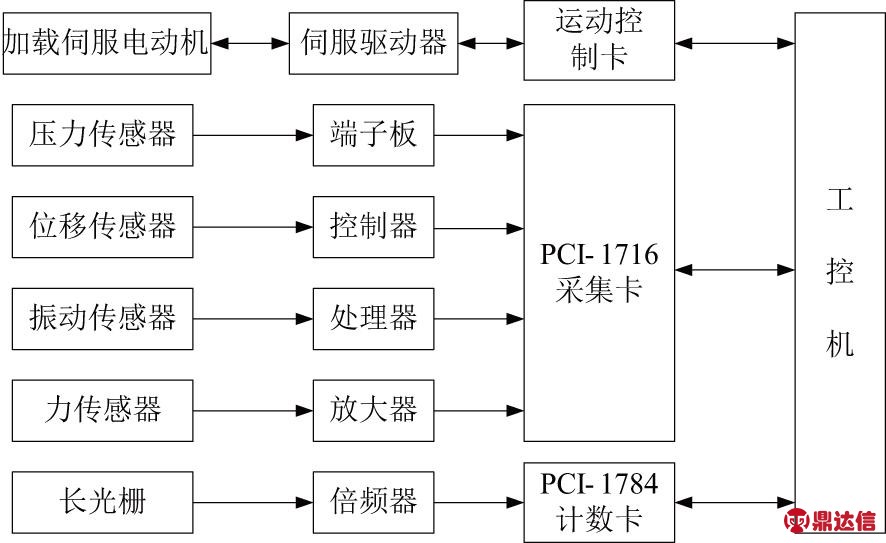
图7 加载与数据采集硬件框图
3.4 数据采集系统
试验台的数据采集系统由工控机、A/D采集卡、计数卡、位移传感器、力传感器、振动传感器和长光栅等部分组成。试验台选用高精度激光位移传感器来测量滑块顶面和侧面相对于导轨基准面之间的平行度;选用高精度力传感器,将其固定安装在滑块上一起运动即可在线测量预紧拖动力;振动传感器用来检测滚动直线导轨副精度丧失时的振动信号,提取精度丧失特征;将长光栅的读数头固定安装在被测导轨副上,实时监测反馈被测导轨副的位置,如图7。
4 测量系统软件设计
4.1 平行度测量系统软件
单次平行度检测,需在测量之前进行参数设置,以方便数据的保存与查找,再根据需要选择合适的采样频率进行数据采集。每次试验龙门往复运行2次,即测得4组数据并对其取平均值作为本次试验的测量结果,具体流程如图8。
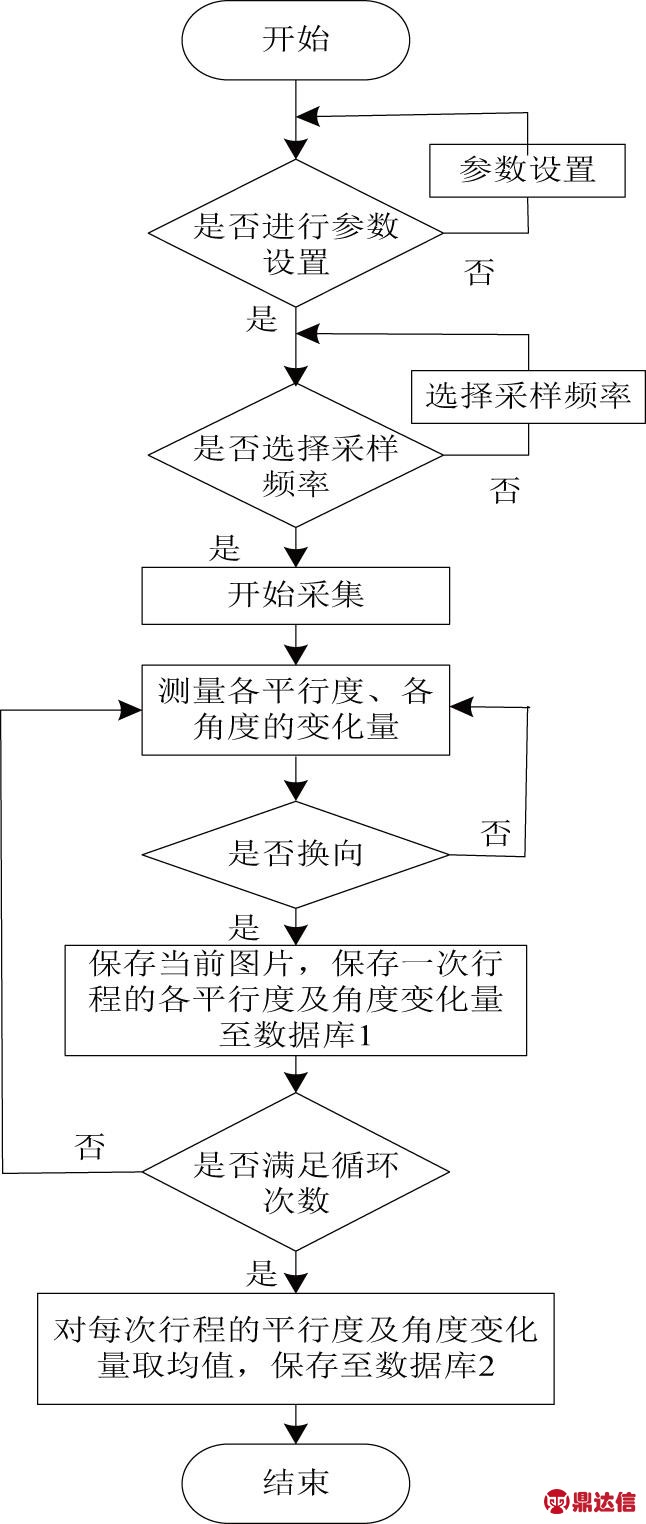
图8 单次精度测量流程图
在整个精度保持性的试验过程中,每次检测完被测导轨副的精度指标,需判断精度损失量是否达到初始精度储备量的80%。若没有继续试验,若达到需取下被测导轨进行离线检测精度是否失效,具体流程如图9。
图9 滚动直线导轨副精度保持性试验流程图
4.2 加载力测量系统软件
在试验的不同阶段,根据额定动载荷设置一个不同的加载力。加载力测量界面实时显示2个压力传感器的值。当压力小于设定值时,选择加载,点击运行按钮即可加载,当压力达到设定值时自动停止加载;当压力大于设定值时,选择卸载,点击运行按钮即可卸载。
4.3 数控系统软件
滚动直线导轨副精度保持性试验台采用西门子数控系统802C来控制龙门的往复运行状态。在其程序命令中自主编程,控制龙门的行程、速度、往复次数等。
5 测试结果分析
平行度测量界面实时显示8个激光位移传感器的测量值,并在一个行程中实时更新测量的最大值与最小值。通过计算实时显示两组导轨副的滑块顶面对导轨底面基准的平行度、滑块侧面对同侧导轨侧面基准的平行度以及偏摆角、俯仰角相对初始状态的变化量及在一个行程中偏摆角、俯仰角变化量的最大值,如图10所示。

图10 平行度测量界面
滚动直线导轨副精度保持性试验台将采集到的数据以及分析处理后得到的结果分别保存到2个数据库,以便按不同的查找方式进行数据的查找与分析。当查找传感器采集的原始数据时,在综合查询中选择要查询的数据表,再根据查找要求进行查找,若查找条件满足导轨唯一性即确定被测导轨的检测日期、型号和位置时,将同时显示导轨信息、试验信息、检测信息,如图11所示。
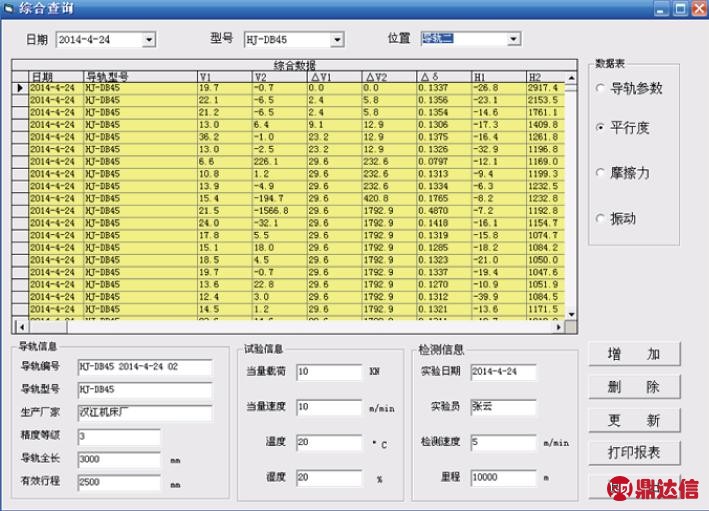
图11 原始数据查询界面
查询部分或全部结果时,在打印报表界面执行。当按某一次的测量结果查找时,可按日期和位置确定唯一的一根导轨进行查找,将只出现那天的一条记录,并显示该导轨的导轨信息、试验时的试验信息及检测时的检测信息,此时打印的报表即为一次试验的报表;若查找指定一根导轨的试验结果时,按导轨编号查找(导轨编号具有唯一性),将显示指定导轨的全部试验结果及此导轨的导轨信息,此时打印的报表为单根滚动直线导轨副精度保持性试验的全部结果,包括整个试验过程中侧面平行度、顶面平行度、偏摆角变化量、俯仰角变化量、当量载荷、当量速度等随里程的变化,如图12所示。
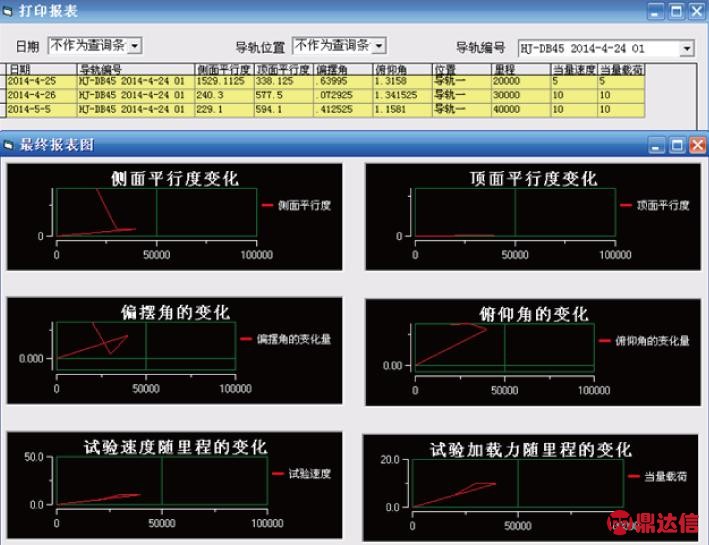
图12 单根试验导轨结果查询界面
6 结语
针对滚动直线导轨副精度保持性问题,对精度保持性的检测方法和系统实现进行了研究。所取得的主要成果如下:对精度保持性的检测方法进行了分析;对滚动直线导轨副精度保持性试验台的测试系统进行了软、硬件设计。为滚动直线导轨副精度保持性试验台的研制提供了参考,为滚动直线导轨副精度保持性试验提供了试验基础。


