
摘要:传统的模型预测控制(MPC)以电磁转矩和定子磁链的幅值为控制变量,在目标函数中需要设计一个权重系数,而目前尚无完善的理论来设计该权重系数,多采用试凑的方法得到,从而限制了MPC在实际工业中的应用。通过解析推导感应电机的内部关系,将定子磁链幅值与转矩的控制转换为对一个等效定子磁链矢量的控制,提出了模型预测磁链控制(MPFC)的解决方案,从而避开了传统MPC中权重系数设计困难的难题,降低了算法复杂度。为提高感应电机控制系统的实用性,将MPFC与速度自适应全阶观测器相结合实现了无速度传感器运行,进一步采用空间矢量调制(SVM)来得到驱动脉冲,提高了电机的稳态性能和低速带载能力。在两电平感应电机仿真与实验平台上进行了验证,结果表明该文提出的感应电机无速度传感器MPFC在宽速范围内具有良好的动静态性能。
关键词:模型预测磁链控制 权重系数 无速度传感器 空间矢量调制
0 引言
矢量控制和直接转矩控制是目前高性能电机控制系统中应用最为广泛的两种方法[1]。矢量控制通过转子磁场定向将定子电流在同步坐标系上分解成d轴和q轴电流并通过PI调节器分别进行控制,从而实现间接控制转子磁链和电磁转矩。矢量控制能够获得较好的稳态性能,但由于其电流内环带宽有限,因此动态响应相对较慢且需要一定参数整定工作。另外,矢量控制的性能依赖于转子磁场定向的精度,因此受转子时间常数变化影响较大。直接转矩控制(Direct Torque Control,DTC)无需旋转坐标变换、电流内环以及PWM环节,具有结构简单、动态响应快等优点,但其稳态性能较差且开关频率不固定[2-4]。
模型预测控制(Model Predictive Control,MPC)是20世纪70年代提出的一类计算机控制算法,在化工领域得到了广泛应用[5],直到1983年才由德国学者J.Holtz首次将MPC应用到电机控制领域[6]。近年来由于数字信号处理器(Digital Signal Processor,DSP)的不断发展,其计算能力大幅提高而价格不断降低,使得低成本硬件平台实现复杂控制算法成为可能。MPC以其结构简单、多变量控制、容易处理非线性约束等优点[7],在学术界与工业界得到了广泛关注。与磁场定向控制(Field Oriented Control,FOC)相比,MPC无需电流内环、旋转坐标变换和空间矢量调制等环节,具有开关频率低以及动态响应快等优点[8]。同DTC相比,MPC可以考虑一些非线性约束(如开关频率降低[9]、共模电压抑制[10]等),灵活性更强。不足之处是需要设计权重系数,稳态性能仍需要提高,因此限制了其在工业中的应用。近年来,国内外学者对MPC在交流电机控制中的应用进行了深入研究,提出了一系列改进MPC,以期解决稳态性能[11-13]、权重系数设计[14-16]、参数鲁棒性[17,18]等问题。
传统的MPC以磁链幅值与电磁转矩为控制目标,需要设计一个合适的权重系数来保证控制系统的性能,但关于权重系数的设计目前尚缺乏完整的理论解决方案,大都是靠经验、仿真与实验来获得,调试繁复且不具有通用性。本文通过深入解析推导感应电机的内部关系,将电磁转矩与磁链幅值的控制转换为对一个等效定子磁链矢量的控制,称之为“模型预测磁链控制(Model Predictive Flux Control,MPFC)”,省却了权重系数的设计。
另外,传统MPC在每个控制周期施加一个电压矢量,存在开关频率变化、稳态性能相对较差、对采样频率要求高等问题。为了提高MPC的稳态性能,有学者提出在一个控制周期内施加两个或三个电压矢量,然后基于无差拍控制[11,12]或转矩脉动最小[13]等原理来获得最优的占空比。尽管这样能有效提高控制系统的稳态性能,但由于备选矢量增大且需要在线滚动优化,因此计算量较大,不利于在线实施。本文对得到的等效定子磁链矢量采用无差拍控制,并与空间矢量脉宽调制相结合,使得在每个控制周期末的定子磁链矢量误差为零,有效提高了控制系统的稳态性能,同时计算量较小。
为了增强控制系统对环境的适应性、提高其运行可靠性并降低硬件成本,无速度传感器技术在高性能电机控制中得到广泛研究和应用[19],这也是MPC实用化必须解决的问题之一。本文将MPFC与全阶观测器[20]相结合实现了宽速范围的无速度传感器运行。由于引入了定子磁链无差拍控制与空间矢量脉宽调制,很好地解决了感应电机无速度传感器MPC在极低速运行时转速波动大、带载能力差等问题,同时也显著提高了控制系统的稳态性能,其有效性通过仿真和实验得到了验证。
1 感应电机数学模型
感应电机在静止坐标系下的数学模型可用复矢量表示为:
电压方程
(1)
磁链方程
(2)
转矩方程
![]() ⊗
⊗![]() ⊗ψs
⊗ψs
(3)
式中,![]() ; p为微分算子,
; p为微分算子,![]() ;Rs、Rr、Ls、Lr、Lm、np、ωr分别为电机定子电阻、转子电阻、定子电感、转子电感、定转子绕组间的互感、电机极对数、电机转速;us、ψs、ψr分别为定子电压、定子磁链、转子磁链矢量。
;Rs、Rr、Ls、Lr、Lm、np、ωr分别为电机定子电阻、转子电阻、定子电感、转子电感、定转子绕组间的互感、电机极对数、电机转速;us、ψs、ψr分别为定子电压、定子磁链、转子磁链矢量。
以定子电流is和定子磁链ψs为状态变量,感应电机在静止坐标系下的数学模型可表示为[13]
px=Ax+Bus
(4)
其中
在实际应用中,需要将式(4)离散来预测k+1时刻的状态变量值,为了提高预测精度,本文采用二阶欧拉公式[21]来离散式(4),具体为
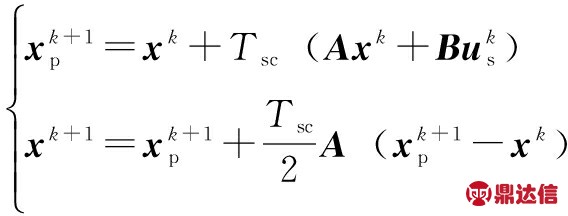
(5)
式中,![]() 为预测校正变量;xk+1为预测得到的下一时刻的状态变量,
为预测校正变量;xk+1为预测得到的下一时刻的状态变量,![]() ]T;Tsc为控制周期。k+1时刻的电磁转矩
]T;Tsc为控制周期。k+1时刻的电磁转矩![]() 相应可表示为
相应可表示为
![]() ⊗
⊗![]()
(6)
2 无速度传感器模型预测磁链控制
图1 为感应电机无速度传感器MPFC的整体框图,包括全阶观测器、等效定子磁链矢量计算、定子磁链无差拍控制和空间脉宽调制。通过转速外环PI调节器得到转矩参考值。本文不考虑弱磁控制,因此定子磁链幅值的参考值设为额定值。下面对各部分进行详细介绍。
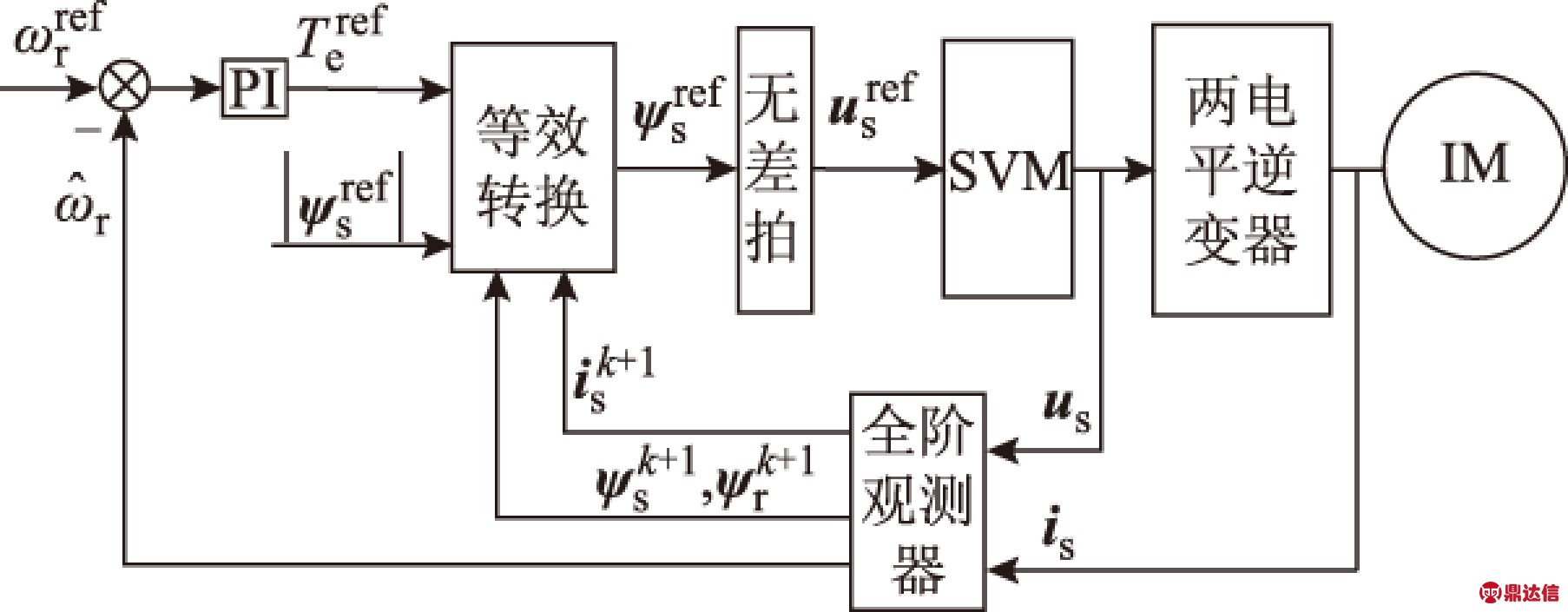
图1 感应电机无速度传感器MPFC框图
Fig.1 Control diagram of sensorless MPFC for IM drives
2.1 速度自适应全阶观测器
对于感应电机来说,由于定子磁链和电磁转矩通常无法直接得到,一般是利用实时测量的电压电流信息和电机参数,根据电机数学模型构造观测器来对内部的状态变量进行估计。由于全阶观测器在较宽范围内都有很高的观测精度[22,23],而且引入速度自适应环节后可以在观测定子磁链的同时估计电机转速,实现无速度传感器控制,因此本文采用速度自适应磁链观测器,其结构框图如图2所示,相应的数学模型为

(7)
式中,![]() ]T;G为反馈增益矩阵;上标“^”表示观测值。
]T;G为反馈增益矩阵;上标“^”表示观测值。
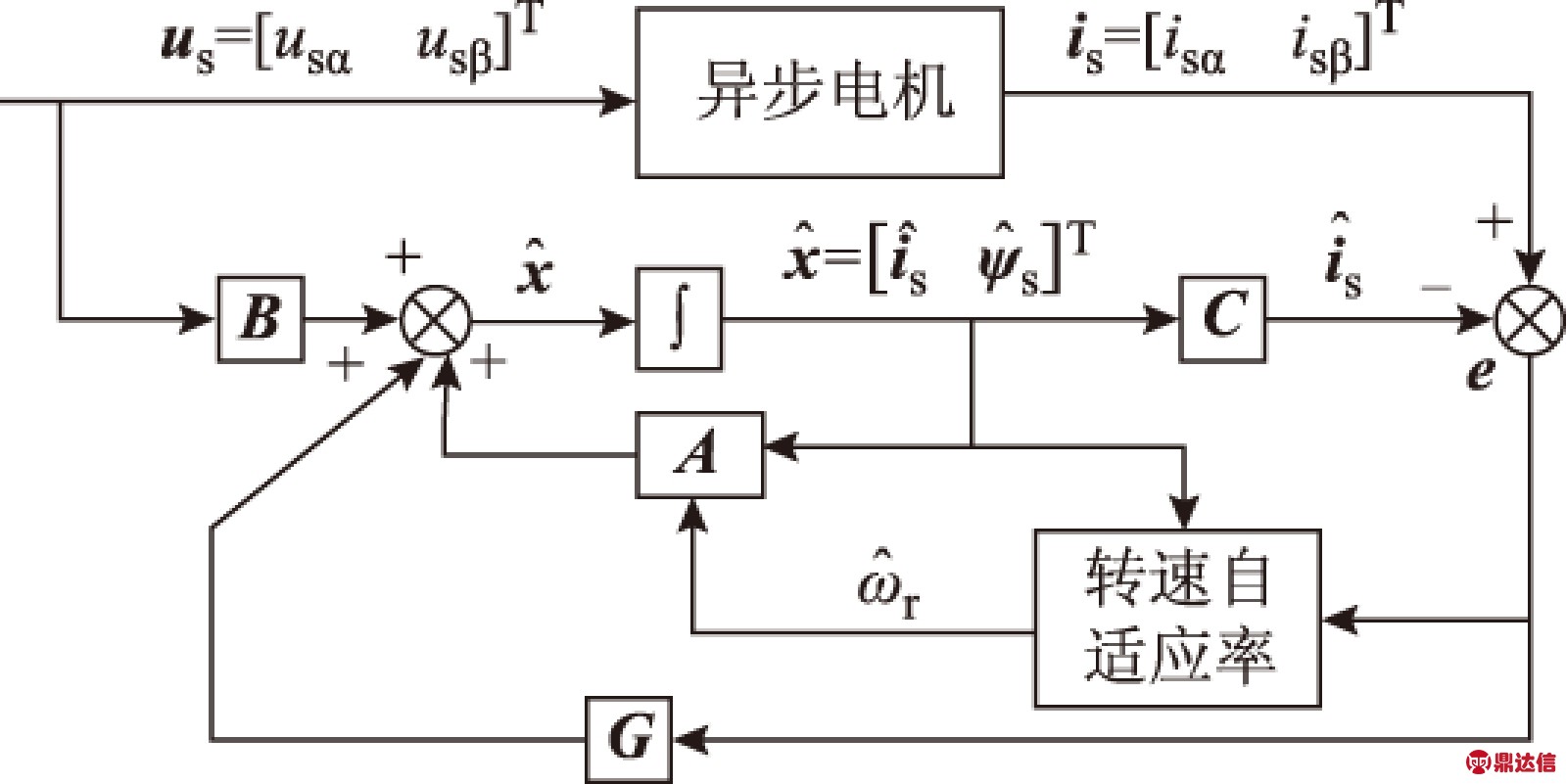
图2 速度自适应全阶观测器
Fig.2 Speed-adaptive full order observer
在全阶观测器的设计中,反馈增益矩阵G与自适应率系数的设计直接关系到控制系统的稳定性、鲁棒性以及收敛速度[22]。为了保证控制系统的稳定性与收敛性,本文采用极点左移的方法来设计增益矩阵,并对其进行简化,最终得到一个常数增益矩阵为[22]
(8)
本文中b取-40。关于增益矩阵设计的更多细节可以参考文献[23],限于篇幅本文不再赘述。
通过式(7)得到的状态变量可以估计出转子磁链矢量为
(9)
引入速度自适应环节,可以利用李雅普诺夫函数推导出转速估计的自适应率为[22]
![]() ⊗
⊗![]()
(10)
式中,Δis为实际电流与观测电流的误差,![]() s;k1为常数。在实际应用中为了保证估计转速的收敛速度,一般采用PI调节器来代替纯积分环节。
s;k1为常数。在实际应用中为了保证估计转速的收敛速度,一般采用PI调节器来代替纯积分环节。
2.2 等效定子磁链矢量计算
传统的MPC以电磁转矩与定子磁链的幅值为控制变量,其相应的目标函数为

(11)
为了获取高性能的控制效果,设计合适的权重系数[14-16]kψ非常重要,但目前权重系数的设计大都是通过经验与仿真得到,缺乏必要的理论基础。因此在实际应用中模型预测转矩控制具有一定的局限性。
基于感应电机的内在关系,通过推导发现对电磁转矩与定子磁链幅值的控制可以转换为对一个等效定子磁链矢量的控制,从而省却了权重系数的设计,减小了控制算法的复杂度,进一步提高了MPC的实用性。以该等效定子磁链矢量为控制目标,相应的目标函数为
(12)
在不考虑弱磁以及效率优化的情况下,定子磁链的幅值可以设为额定值,即
(13)
由于转子磁链矢量的估计值可以通过式(9)获得,将式(13)代入到式(3)可以得到转矩达到给定值时定子磁链矢量相角的参考值为

(14)
根据式(13)和式(14)可以得到转矩和磁链同时达到给定值时相应的定子磁链矢量的参考值为
(15)
式(15)即为实现转矩和磁链同时无差拍控制的等效定子磁链矢量表达式。由于数字控制系统中存在一拍延时,在实际应用中需要补偿一拍延时对控制系统的影响。以上步骤总结如下:
1)通过式(7)并考虑一拍延迟补偿可得到定子电流和定子磁链的估计值![]() ,进一步代入式(9)可得到
,进一步代入式(9)可得到![]() 。
。
2)基于感应电机的数学模型可得到k+2时刻的转子磁链![]() 的表达式为
的表达式为
(16)
由于电气时间常数远小于机电时间常数,可认为![]() 。
。
3)通过式(14)可得到定子磁链矢量的相角在k+2时刻的参考值为
(17)
4)与式(15)类似,可以得到定子磁链矢量在k+2时刻的参考值,从而得到补偿一拍延时之后的最终目标函数为
(18)
2.3 定子磁链无差拍控制
传统MPC中需要对电压矢量进行枚举预测,从而得到使目标函数(18)最小的电压矢量。由于在每个控制周期施加的只是基本电压矢量,因此稳态性能相对较差。本文在前面已经得到定子磁链矢量在k+2时刻的参考值的基础上,通过定子磁链无差拍控制来获得k+1时刻的参考定子电压矢量。具体表达式为
(19)
式中![]() 根据式(7)得到并考虑了一拍延迟。得到参考电压矢量后,本文采用空间矢量脉宽调制来合成uref,得到两电平逆变器的开关驱动脉冲。
根据式(7)得到并考虑了一拍延迟。得到参考电压矢量后,本文采用空间矢量脉宽调制来合成uref,得到两电平逆变器的开关驱动脉冲。
3 仿真和实验结果
3.1 仿真结果
为了验证本文所提出的无速度传感器MPFC的有效性,在Matlab/Simulink环境下进行了仿真。感应电机的参数见表1,控制系统的采样频率为5 kHz。仿真结果中电机的实际转速仅用于对比,参与实际控制系统闭环控制的为估计转速。
表1 仿真和实验参数
Tab.1 Simulated and Experimental parameters
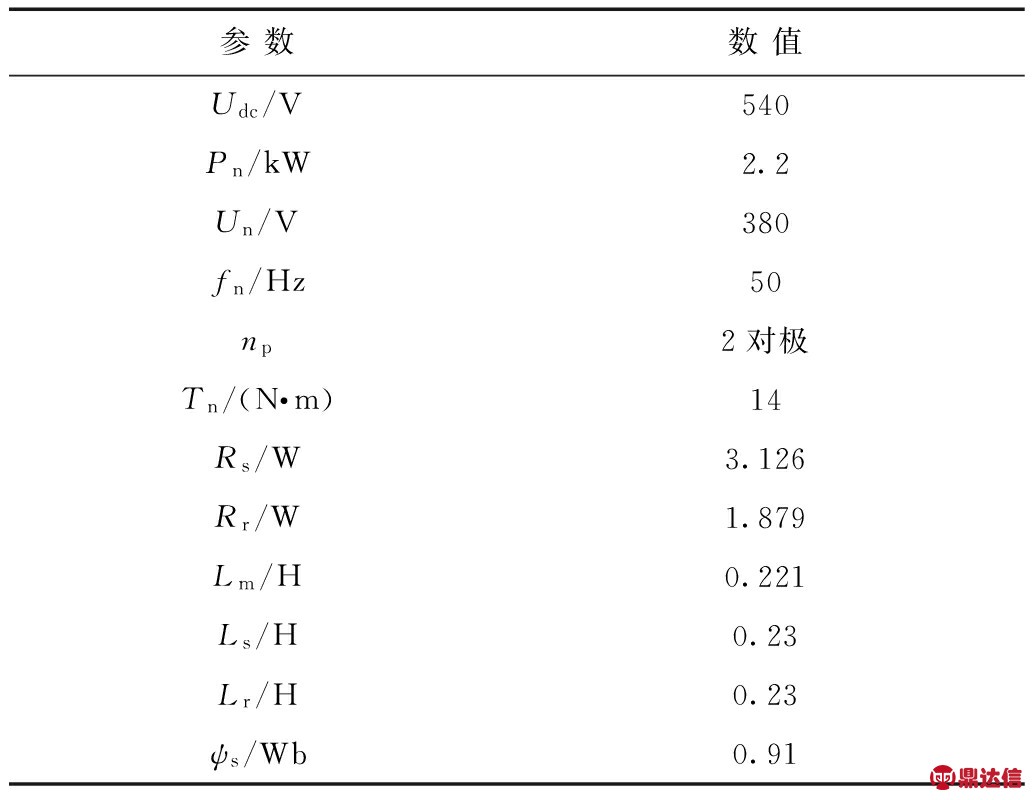
图3a为带预励磁措施的无速度传感器MPFC的仿真结果。首先通过直流预励磁的方法来建立磁场,当定子磁链的幅值达到额定幅值的95%时,预励磁结束,然后电机以最大转矩从静止加速到1 500 r/min,避免了较大起动电流。在0.35 s突然施加一个额定负载转矩,可以看出电机转速能很快地恢复到额定转速。无论起动还是带载运行,估计转速与实际转速都几乎重合,证明了所采用全阶观测器的有效性。
图3b为没有采用预励磁措施的无速度传感器MPFC仿真结果。可以发现,无预励磁直接起动电机会导致较大的起动电流,原因是电机电流不仅要用来提供最大转矩,还要用来建立定子磁场。在电机起动前首先通过直流预励磁[22]来建立定子磁场,可以避免较大电流,而且可以保证较大的起动转矩,是比较有效的电机起动措施。在MPC中也可以通过在目标函数中增加电流限制项来抑制起动电流,但增加了权重系数,实际中并不实用[24]。
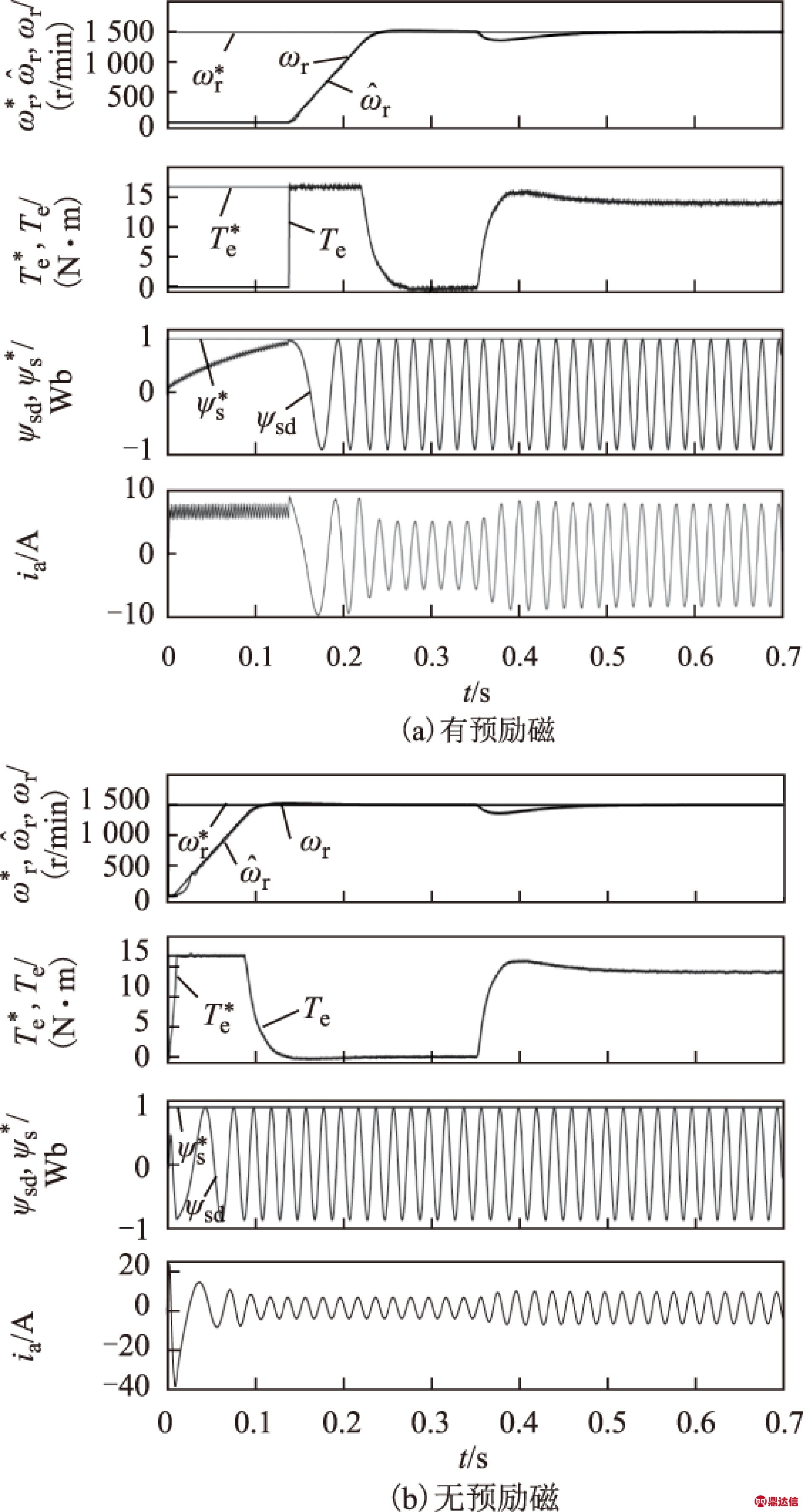
图3 无速度传感器MPFC仿真结果
Fig.3 Simulation results of sensorless MPFC
为了考察本文方法在低速时的有效性,图4进一步给出了电机在6 r/min时带额定负载的稳态波形。从图4中可看出估计转速与实际转速几乎完全重合,磁链幅值基本保持不变,定子电流光滑且正弦,表明本文所提方法在极低速下仍具有良好的性能。需要指出的是估计转速和实际转速在参考转速上下存在一定波动,其原因是低速时定子电压较小,采用重构的定子电压用于观测器势必会对速度估计带来一定影响。尽管如此,图4的仿真结果表明本文方法可以低速稳定运行。
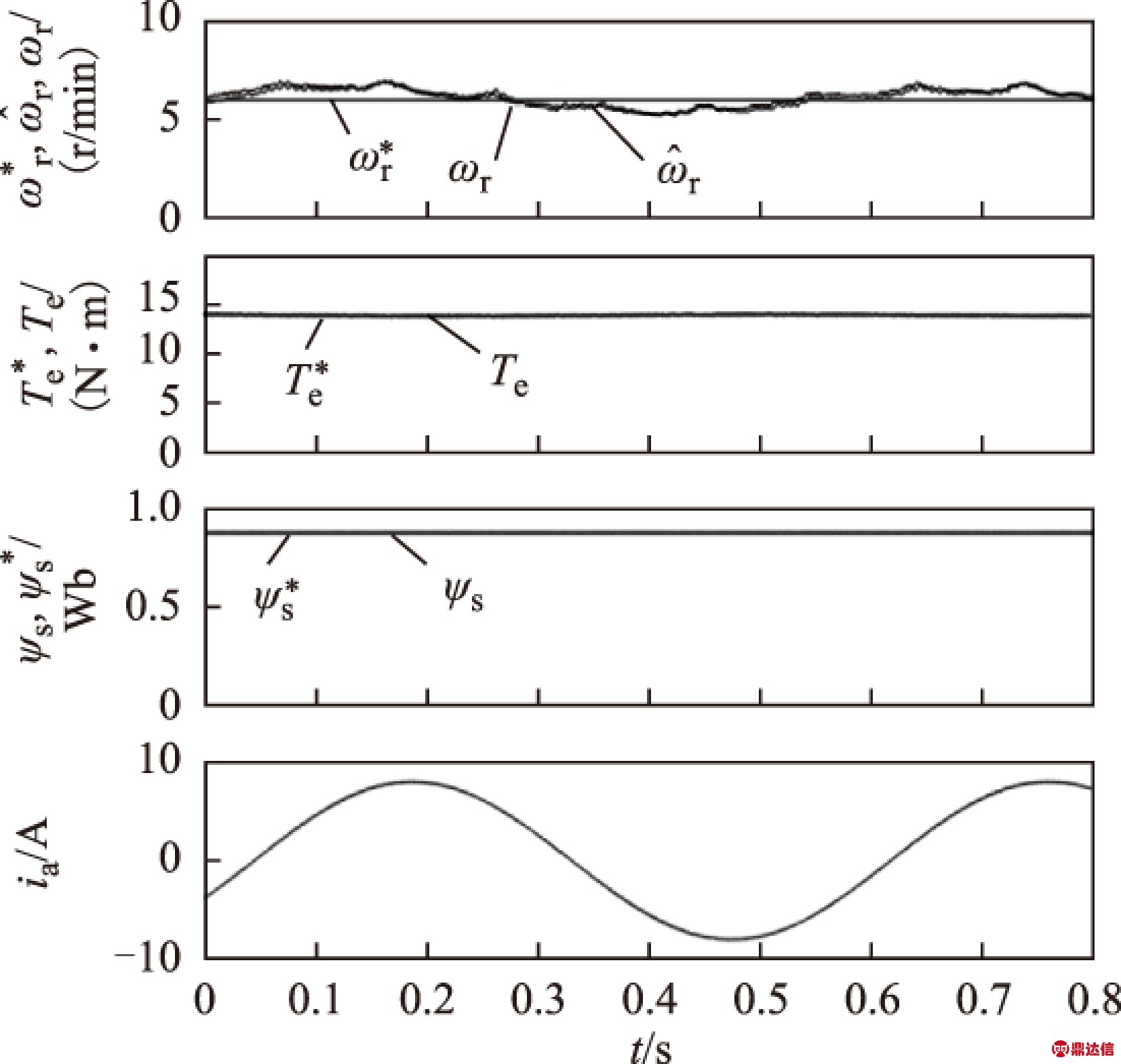
图4 无速度传感器MPFC低速带额定负载仿真结果(6 r/min)
Fig.4 Simulation results of sensorless MPFC at 6 r/min with rated load
3.2 实验结果
除了仿真之外,进一步在基于32位浮点TI DSP TMS320F28335的两电平交流调速实验平台上对本文提出的无速度传感器MPFC进行了验证。实验装置如图5所示,电机参数和控制系统采样频率与仿真一致。负载转矩通过磁粉制动器来加载,电机的实际转速通过一个2 000线增量式编码器获得,电机的内部变量通过控制板上的12位DA输出到示波器上显示。在本实验中实际测量转速仅用于对比分析,闭环反馈速度为估测转速。
图5 两电平感应电机实验平台
Fig.5 Experimental setup of two-level inverter-fed IM drive
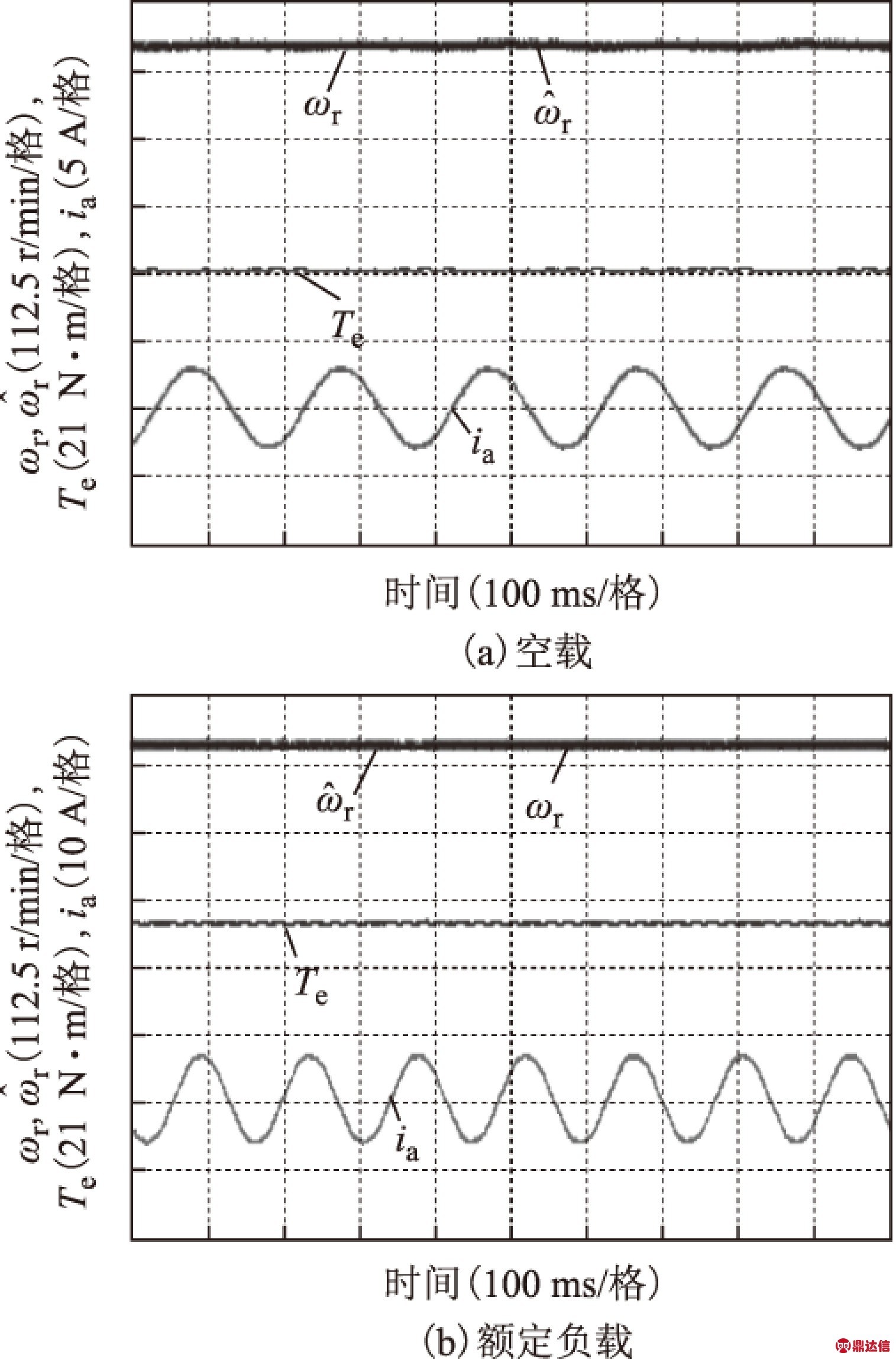
首先对无速度传感器MPFC在10%以及100%额定转速下的稳态性能进行了测试。图6a、图6b分别为150 r/min时空载及带额定负载稳态运行时的波形,图7a、图7b分别为1 500 r/min时空载及带额定负载
图6 150 r/min时稳态实验波形
Fig.6 Steady state experimental waveform at 150 r/min
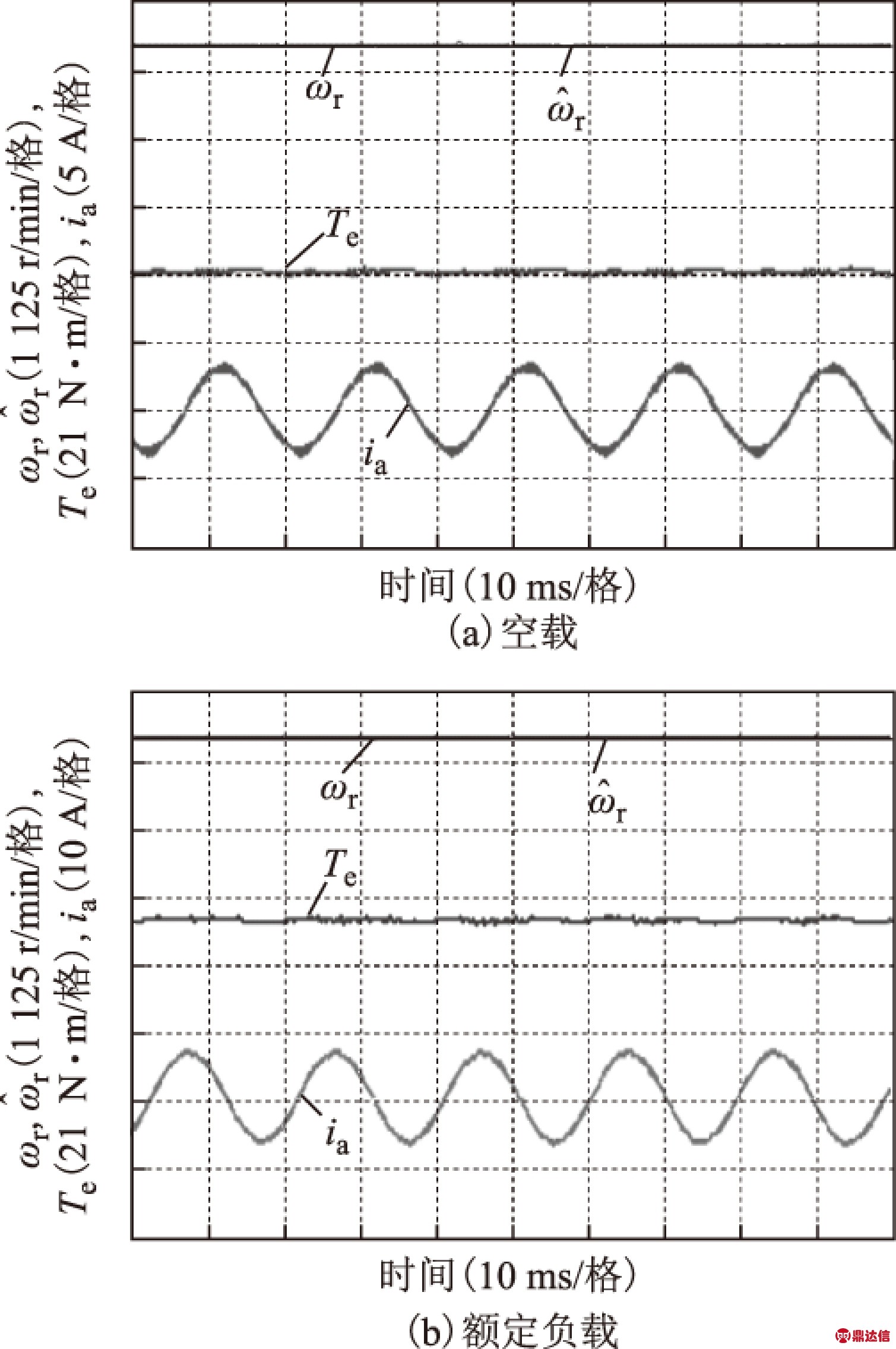
图7 1 500 r/min时稳态实验波形
Fig.7 Steady state experimental waveform at 1 500 r/min
稳态运行时的波形。从实验波形可以看出电机运行平稳,电流波形光滑且正弦,估计转速与实际转速基本一致,表明本文提出的方法无论在低速还是高速均具有良好的稳态性能与带载能力。
为进一步测试无速度传感器MPFC在极低速下的性能,图8和图9分别给出了15 r/min与9 r/min时的空载实验波形,从图中可以看出,即使在极低速下电机依然能平稳运行。估计转速与实际转速略有偏差,但总体上仍较为一致。受死区等逆变器非线性特性以及电机参数准确性的影响,极低速运行时转速存在一定的波动,与图4所示仿真结果基本一致。其主要原因是低速时由于定子电压较小,死区等逆变器非线性因素导致重构的定子电压与实际定子电压的误差相对较大,将重构的定子电压用于观测器势必会对速度估计带来影响。另外,观测器需要转速信息对定子磁链进行观测,无速度传感器运行带来的速度估计误差会反映到观测的定子磁链上,进而影响到参考定子电压矢量(式(19))的计算。最后,电机参数尤其是定子电阻的变化也会对低速性能有一定影响。以上几个因素会导致控制系统的稳态性能有所下降,转速波动即为其表现之一。尽管如此,电机运行稳定并无振荡,表明本文所提方法在低速下仍具有良好的性能。下一步工作是加入死区补偿和对电机参数尤其是定子电阻进行在线辨识,从而进一步提高本文方法的低速性能。
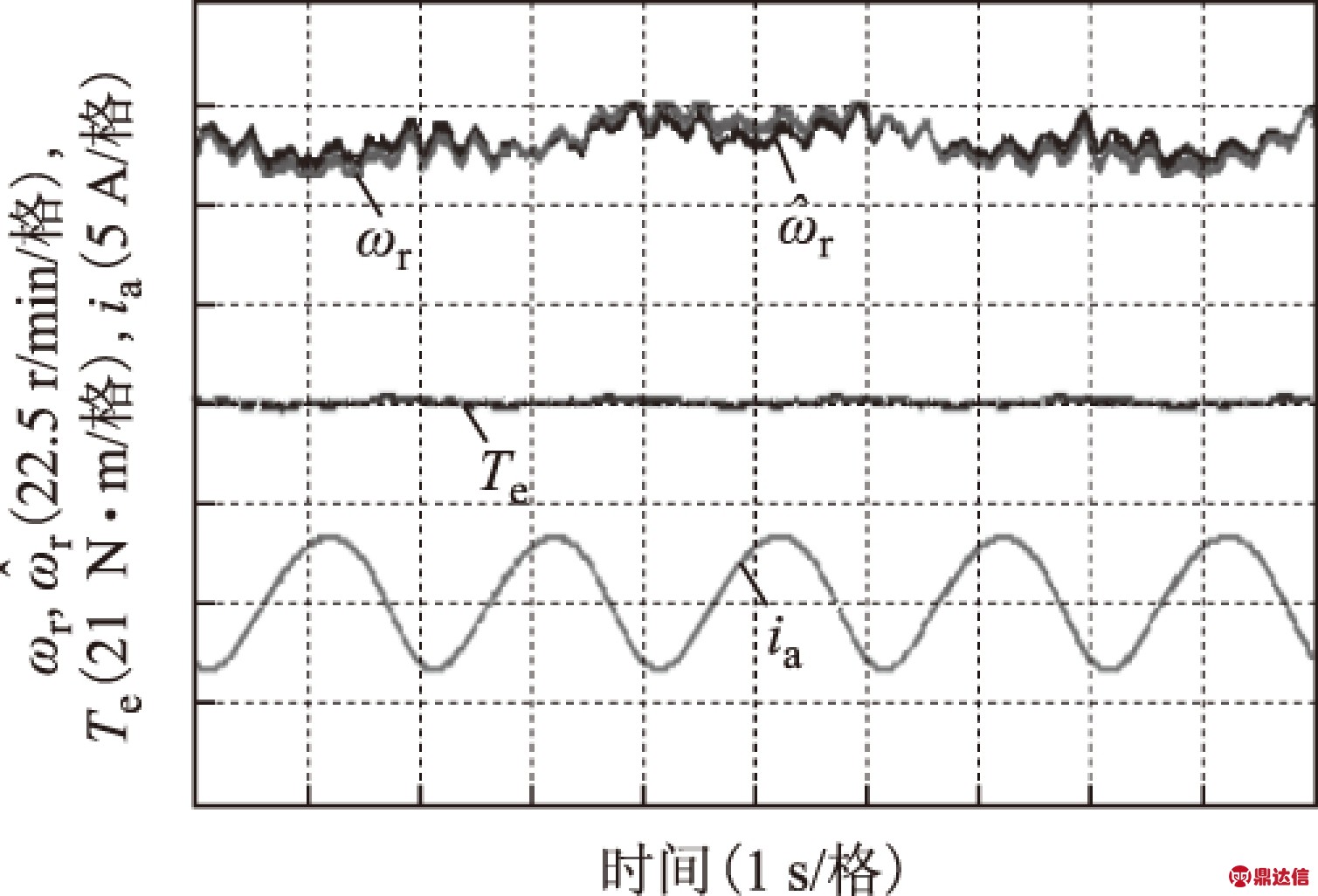
图8 15 r/min时空载稳态实验波形
Fig.8 Steady state experimental waveform at 15 r/min (no load)
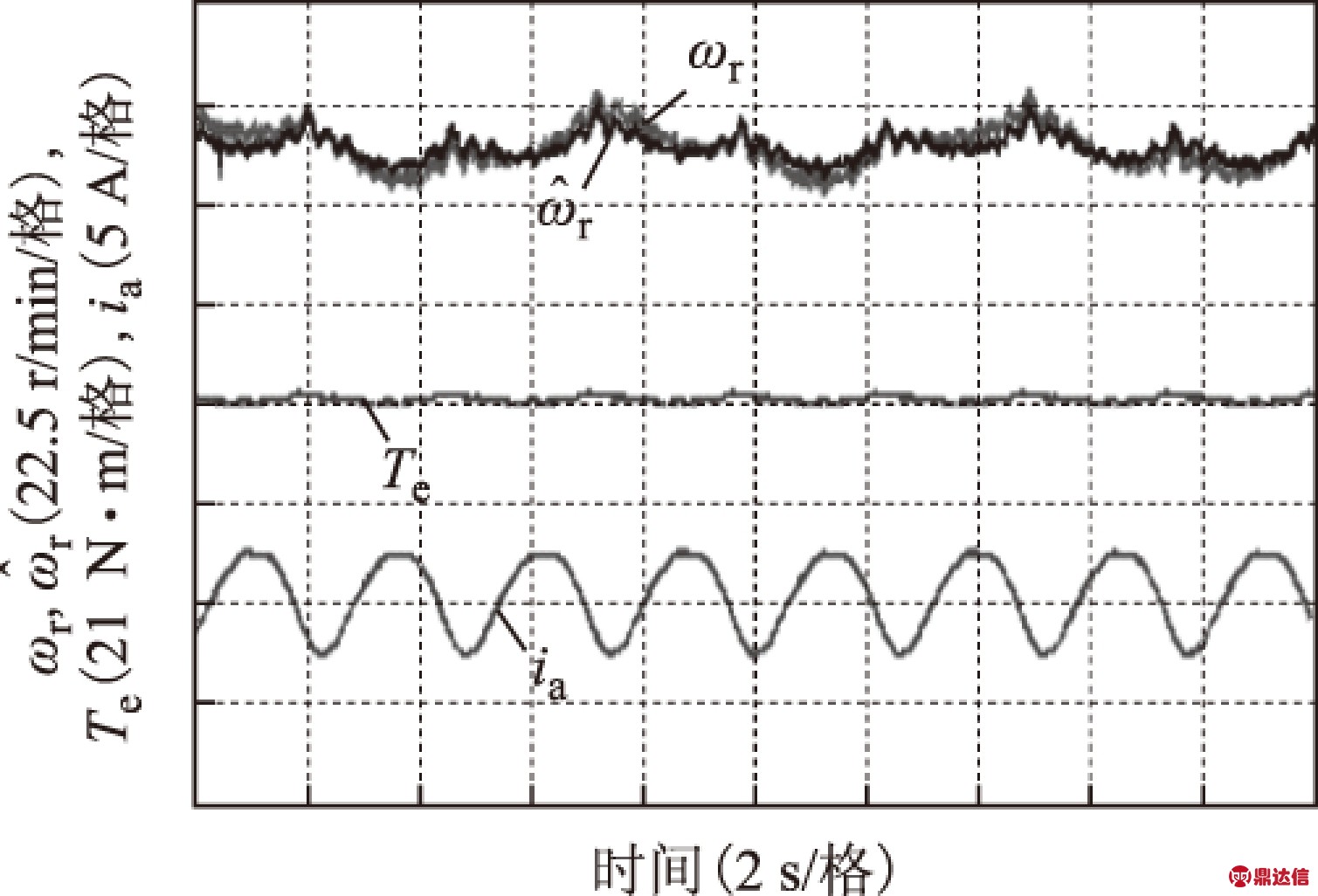
图9 9 r/min时空载稳态实验波形
Fig.9 Steady state experimental waveform at 9 r/min (no load)
图10进一步给出了无速度传感器MPFC在15 r/min时带额定负载的稳态实验波形。从图10中可以看出,电机运行稳定,估计转速与实际转速基本一致,电流波形较为光滑正弦。由于实验中采用磁粉制动器加载,负载转矩并非完全保持恒定,因此转速存在一定的波动现象。
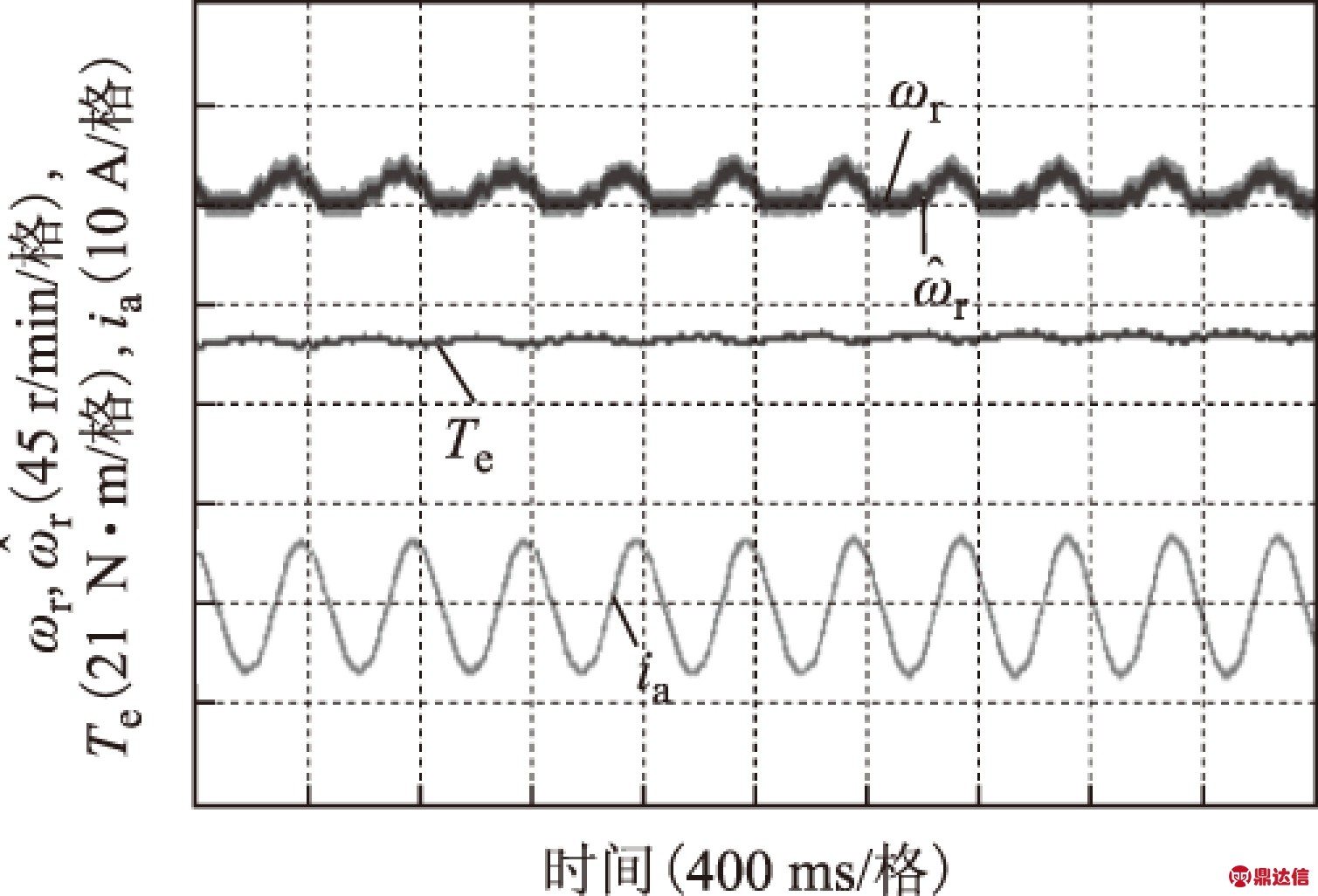
图10 15 r/min时带额定负载的稳态实验波形
Fig.10 Steady state experimental waveform at 15 r/min (rated load)
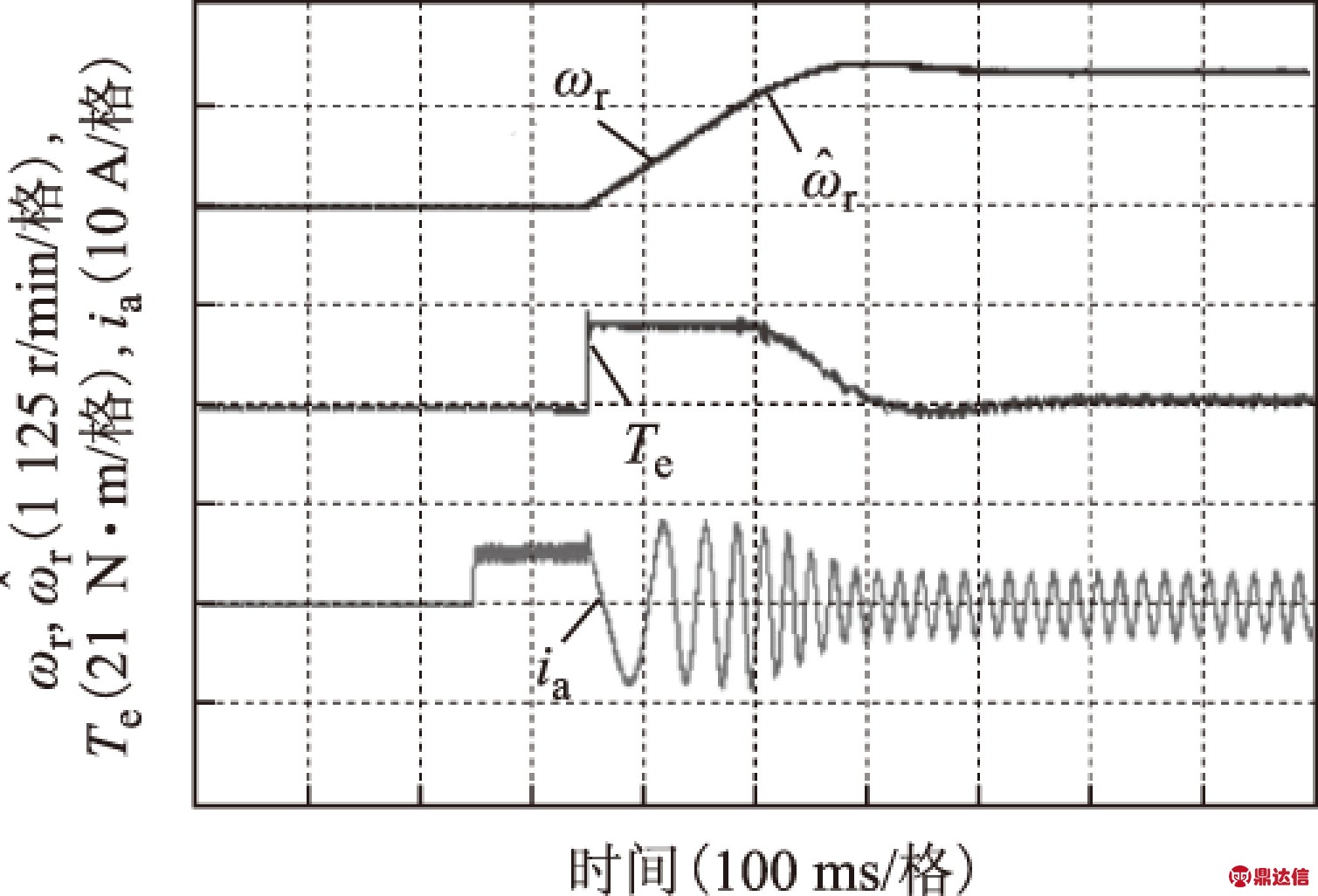
除了稳态性能测试,还对无速度传感器MPFC的动态性能进行了测试。图11为电机从静止到1 500 r/min时空载起动波形。与图3a一致,电机起动前首先通过直流预励磁建立定子磁场,然后电机以最大转矩迅速加速至设定速度,整个起动过程非常平稳,并无较大起动电流,同时估计转速与实际转速基本重合。图12为1 500 r/min时的正反转试验,在无
图11 0~1 500 r/min时空载起动波形
Fig.11 Starting response from 0 to 1 500 r/min (no load)
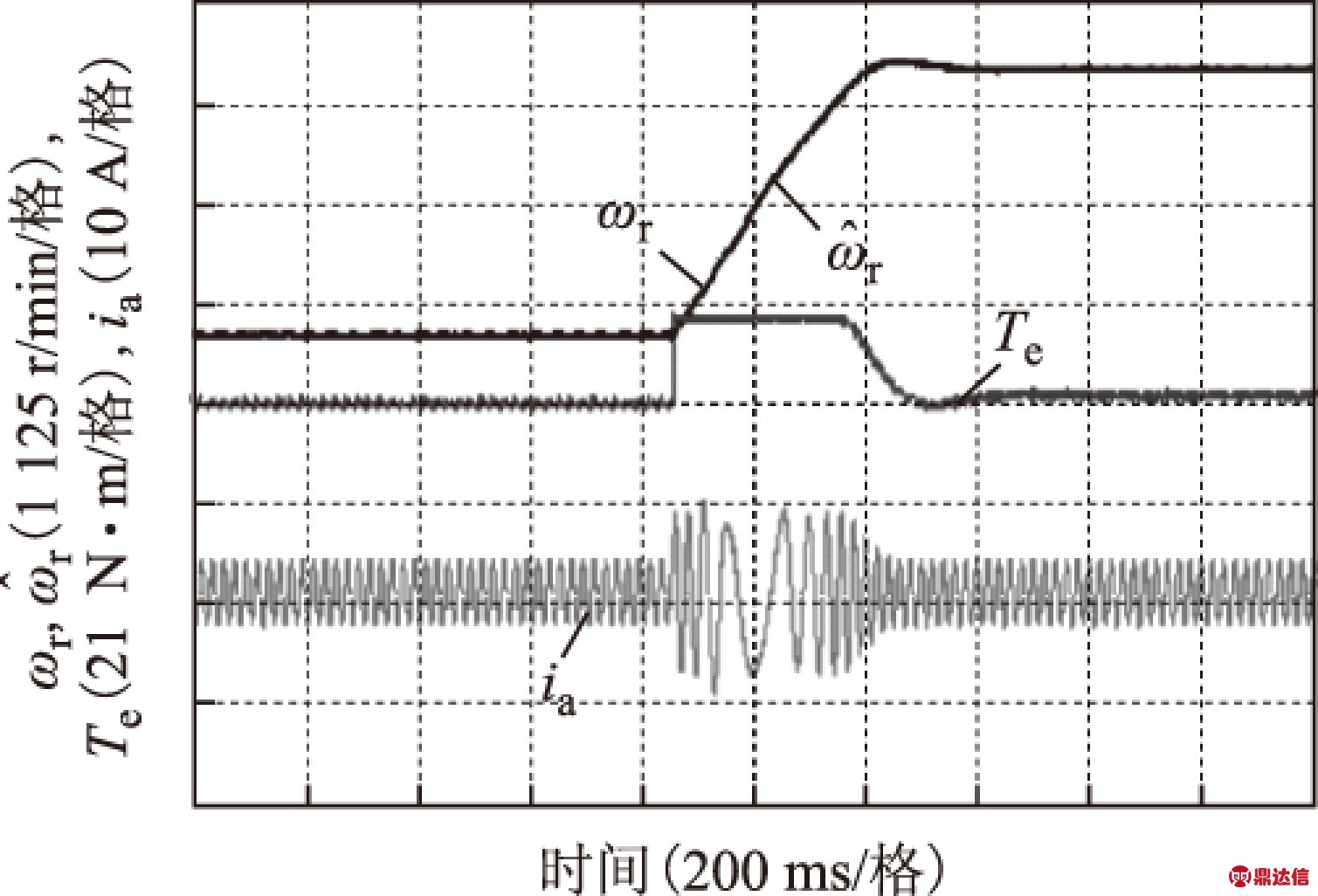
图12 1 500 r/min时正反转波形
Fig.12 Reverse to forward operation at 1 500 r/min
速度传感器运行情况下,电机能快速稳定通过转速零点,正反转切换过程亦非常平稳。
从图11和图12可以看出,估计转速在动态过程中与实际转速非常一致,表明估计速度具有较快的动态响应。这两项测试表明基于SVM的无速度传感器MPFC调速控制系统具有良好的动态性能。
4 结论
本文提出无需权重设计的模型预测磁链控制(MPFC),进一步与速度自适应全阶观测器相结合,并采用空间矢量脉宽调制来得到驱动脉冲,不仅有效提高了控制系统的稳态性能,同时也实现了宽范围无速度传感器运行。采用预励磁措施,在保证较大起动转矩的基础上有效减小了电机起动电流。仿真和实验结果表明,本文提出的无速度传感器MPFC实现了低速无速度传感器带额定负载稳定运行,且具有优异的动态性能。研究结果为感应电机无速度传感器高性能调速控制系统提供了新型解决方案,具有较大的实用价值。


