
摘 要:为了实现对各种行程与定位系统进行准确的位置测量,针对电磁感应式位置传感器的电磁感应系统展开研究,在了解电磁感应系统工作原理的基础上,利用毕奥—萨伐尔定律推导出了余弦形式的激励线圈在空间某一点处所产生的磁感应强度的计算公式,并进一步通过Ansoft Maxwell电磁场有限元分析软件建立了电磁感应式传感器的模型,并对其进行了仿真分析。结果表明:激励线圈周围产生的磁感应强度大小成对称分布,且在距离激励线圈平面±2 mm的范围内强度较大。同时,感应线圈中电流大小成正弦规律变化,且频率与激励源频率相等。由分析结果可知,实际设计中选取传感器移动转子与激励线圈之间的距离为2 mm较为合适。
关键词:位置传感器; 电磁感应; 毕奥—萨伐尔定律; Ansoft Maxwell
0 引 言
位置传感器(position sensor)是指能感受被测物的位置并转换成可用输出信号的传感器,被广泛应用于各个需要采集位置信号的领域。位置传感器主要分为接触式和非接触式两大类。传统的位置传感器多为接触式位置传感器,如电位计式位置传感器。此类传感器具备结构简单、成本低廉等优点,但是由于工作过程中摩擦副的存在,长期使用必然会导致测量精度下降,使用寿命缩短[1]。相比之下,现在市场上采用电磁感应原理、霍尔效应、磁阻效应、电容原理等技术设计制造的非接触式传感器,不仅具备了传统接触式传感器的优点,而且能很好避免摩擦磨损,确保长期使用情况下的测量精度。这使得非接触式传感器应用越来越广泛,也使其成为了相关领域研究的重点。
本文针对基于电磁感应原理的传感器进行设计。首先介绍了电磁感应系统的工作原理,并在毕奥—萨伐尔定律的基础上,推导出了余弦形式的激励线圈在空间某一点产生的磁感应强度的计算公式。同时运用Ansoft Maxwell电磁场有限元分析软件建立了电磁感应式传感器的模型并对其进行了仿真分析。给出了合理的设计参数,为电磁感应式非接触传感器的设计提供了有益的参考。
1 原理分析
如图1所示为电磁感应系统的检测原理示意图[2]。图中1为激励线圈,2为感应线圈,3为可移动感应元件。在激励线圈1中通入高频交流电,从而在激励线圈周围区域产生变化的磁场。处在这个磁场中的感应线圈2由于电磁感应感生出感应电压E,同时可移动感应元件3可以在这个磁场中产生涡流效应,减弱原磁场的能量。可移动感应元件3是一个无源LC谐振器,由交变的电磁场激发产生振荡电路,沿着图1中X方向左右移动。由于振荡交变电路产生的交变磁场削弱原磁场的作用,在感应线圈2中能感应出场强变化位置的电信号,由此来指示位移的变化。
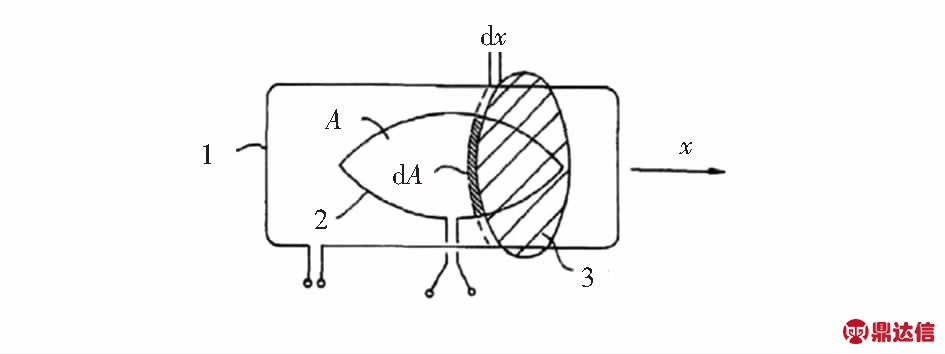
图1 电磁感应系统原理图
由于激励线圈是一个对称的闭合线圈,电流将成正反依次分布。通高频交流电时激励线圈附近将产生分布均匀的交变磁场。由于对称关系,在元件3不动的情况下,处在磁场中的感应线圈产生的感应电动势将互相抵消;在元件3移动的情况下,谐振器线圈由于涡流效应产生同频的交流电,从而也产生交变磁场作用于感应线圈2。所以,通过感应线圈2中感应出的场强变化即可测量出移动元件3的位置变化。
2 通电线圈磁感应强度计算
毕奥—萨伐尔定律指出:电流元Idl→在空间某点P处产生的磁感应强度dB的大小与电流元Idl→的大小成正比,与电流元Idl→所在处到P点的位置矢量和电流元Idl→之间的夹角的正弦成正比,而与电流元Idl→到P点的距离的平方成反比[3]。
如图2所示为毕奥—萨伐尔定律示意图,其磁感应强度的数学表达式如下
B→![]()
![]()
(1)
式中 I为源电流,L为积分路径,![]() 为电流源到场点的距离,dl→为源电流的微小线元素,
为电流源到场点的距离,dl→为源电流的微小线元素,![]() r为电流元指向待求场点的单位向量,μ0为真空导磁率,其值为μ0=4π×10-7Tm/A。
r为电流元指向待求场点的单位向量,μ0为真空导磁率,其值为μ0=4π×10-7Tm/A。
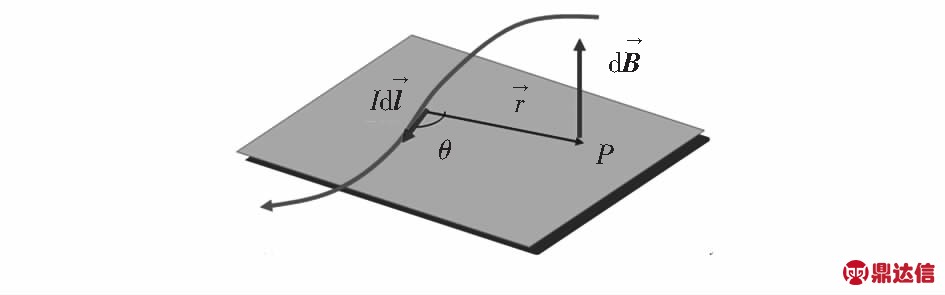
图2 毕奥—萨伐尔定律示意图
对于一个周期内一组由正反余弦函数形式构成的线圈,在其正上方Z1平面处一点,当y=cos x时,可以推出![]() (X1-t,Y1-cos(t),Z1),dl→
(X1-t,Y1-cos(t),Z1),dl→![]() ,代入公式(1)即可求出产生的磁感应强度
,代入公式(1)即可求出产生的磁感应强度
B→![]()
![]()
(X1-t,Y1-cos(t),Z1)
(2)
当y=-cos x时,可以推出![]() →
→![]() ,代入式(1),即可求出产生的磁感应强度
,代入式(1),即可求出产生的磁感应强度
B→![]()
![]()

(X1-t,Y1+cos(t),Z1)
(3)
上述式(2)、式(3)以向量坐标的形式表示了余弦形状的激励通电导线在交变电流作用下,在空间某一点所产生的磁感应强度。将一组正反变化的余弦形状的激励线圈产生的磁感应强度相加可得到余弦形状激励线圈的表达式为
B→cos=B→1+B→2
(4)
3 Maxwell建模与仿真
Maxwell是Ansoft公司推出的一种功能强大、结果精确、操作简便的二维/三维电磁场有限元分析软件[4]。涵盖了静电场、静磁场、时变电磁场、涡流场、瞬态场、温度场等的计算。可用来分析电机、传感器、变压器、永磁设备、激励器等电磁装置的静态、稳态、瞬态、正常工况和故障工况的特性。同时还可产生高精度的等效电路模型以供Ansoft的SIMPLORER模块和其它电路分析工具调用。
本文使用的Maxwell中的瞬态场主要用于求解某些涉及到运动和任意波形的电压、电流源激励的设备。该模块能同时求解磁场、电路及运动等强耦合的方程,因而可轻易地解决上述装置的性能分析问题。
3.1 模型的建立
图3所示为利用Maxwell软件所建立的传感器电磁感应系统的简化模型图。
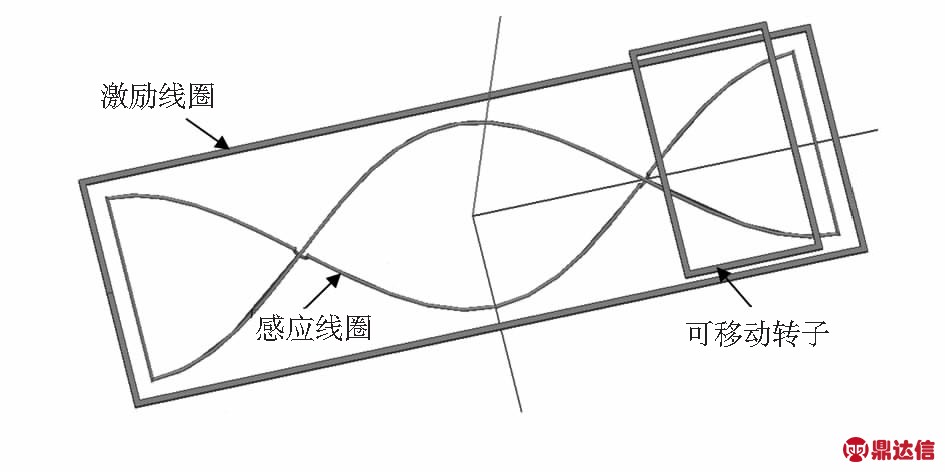
图3 电磁感应系统模型
激励线圈设置为标准类型线圈,这里只考虑磁场的空间电磁效应,不考虑线圈的趋肤效应。同时通过软件自带的Ansoft Maxwell Circuit Editor通以5 V,0.1 MHz的正弦交流电。设置导体半径为0.3 mm,材料为铜,激励线圈中间过孔连接,在PCB上下板分别形成正负单圈的闭合回路。感应线圈为分布在距激励线圈轮廓2 mm外的矩形宽截面单导体,位于激励线圈同一块PCB板上,并将PCB板简化成与空气一体,其正负回路中间采用0.2 mm的过孔连接。可移动转子简化为矩形线圈。由参考文献[5]可知铜和铝等相对磁导率近似为1,涡流效应相对明显,便于感应线圈测量磁感应强度的变化,因此,可移动转子的材料选择铜或铝。
3.2 系统仿真分析
图4给出了电磁感应系统在有转子覆盖(即存在涡流效应)时的电磁感应系统激励线圈的仿真云图。从图中可以看出,在没有转子覆盖的区域,激励线圈产生的磁感应强度在其所包围的范围内分布均匀;而当可移动转子覆盖在激励线圈正上方一定距离的时候,激励线圈由于转子的涡流效应,使其在转子附近产生的磁感应强度出现明显的变化,这种变化的效果正好就是电磁感应式传感器检测转子位置变化的基础。
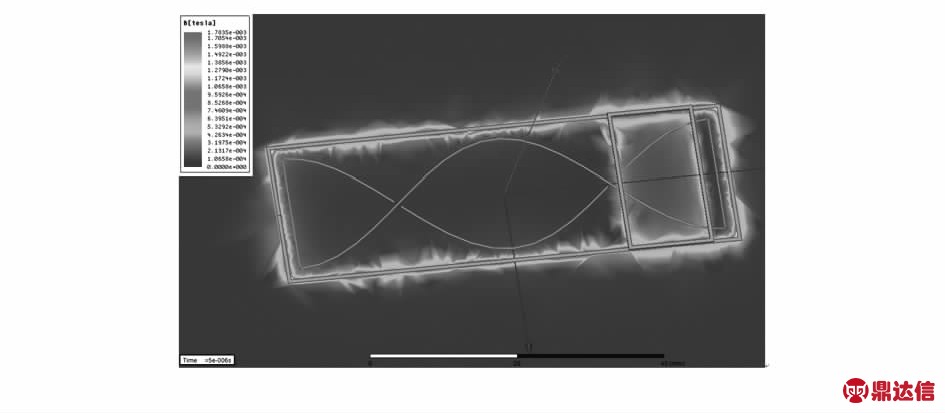
图4 电磁感应系统仿真云图
在上述仿真结果的基础上,为了进一步探明激励线圈所产生的磁感应强度在空间的分布,对激励线圈中心轴线沿Z向-10~10 mm的范围进行了仿真求解,得到如图5所示的磁感应强度分布图。从图中可知,激励线圈产生的磁感应强度在中心面上下成对称分布,且越靠近中心面的地方产生的磁感应强度越大。在进行电磁感应式传感器设计时需要依据图中磁场强度大小的分布以在安装方便等方面进行合理的选择。本设计选择将可移动转子布置在距离激励线圈正上方1 mm处。
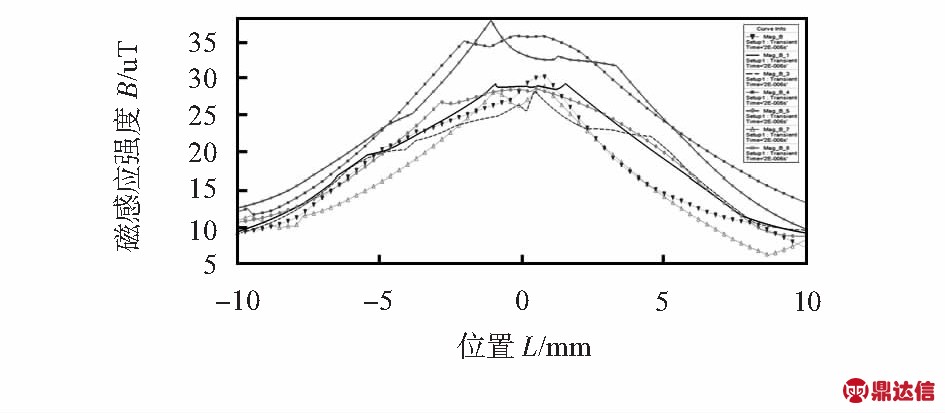
图5 激励线圈附近磁感应强度分布图
为了探明电磁感应系统中感应线圈电流的大小,将转子布置在激励线圈正上方2 mm处进行仿真。利用Ansoft Maxwell场计算器测得转子在激励线圈正上方沿轴线方向-25~25 mm之间移动时感应线圈的电流值,如图6所示为转子处在不同位置时感应线圈中电流值的大小。
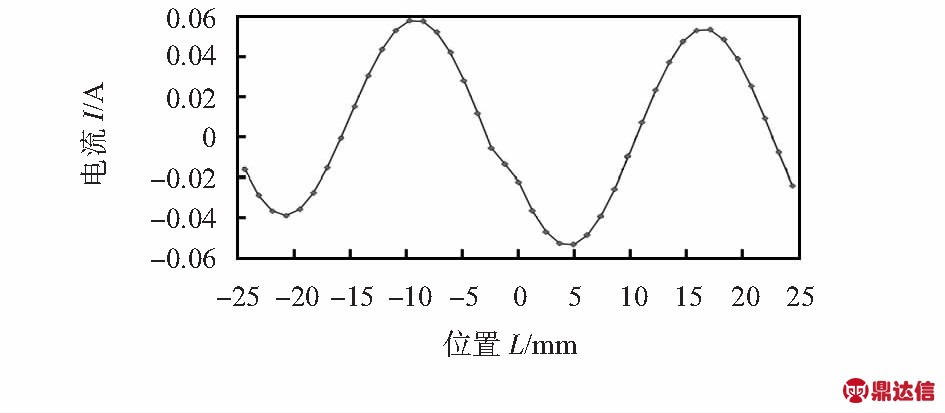
图6 感应线圈电流值随转子位置的变化
由图6可知,当转子沿着激励线圈正上方2 mm平面内作轴向移动时,由于交变激励电源以及转子涡流效应的相互影响,使得感应线圈中产生了具有正弦规律变化的同频电流。在本仿真结果的基础上,通过选择合适的转子移动范围,便可制定电磁感应式位置传感器的测量依据。
4 结 论
本文针对电磁感应式位置传感器进行研究,在详细阐述了电磁感应系统工作原理的基础上,利用毕奥—萨伐尔定律推导出了激励线圈在其周围空间的磁感应强度计算公式,给通过法拉第电磁感应定律求解感应线圈电动势提供了理论支持。运用Ansoft Maxwell软件对电磁感应系统的瞬态电磁场进行了建模分析,验证了电磁感应原理,同时通过软件的场计算器算出了激励线圈在通过正弦交变电压时其空间磁感应强度的分布,也进一步求出了感应线圈中的感应电流大小,给出了移动转子与激励线圈之间的合理距离为2 mm。为电磁感应式位置传感器的设计提供了依据。


