
摘要:在进行螺旋锥齿轮数控加工过程中,用直廓截形代替盘状铣刀刀刃理论截形所产生的偏差会影响螺旋锥齿轮齿面加工精度。针对该问题,分析了螺旋锥齿轮数控加工原理,并在此基础上建立了从刀刃到形成齿面的数学模型;依据空间啮合理论计算盘状铣刀刀刃实际截形,分析并建立了盘状铣刀刀盘半径偏差与齿面误差的关系;进一步推导出刀具实际截形误差的计算过程;最后根据螺旋锥齿轮的加工原理对刀具的误差进行了补偿计算,并对补偿结果进行了仿真实验验证,证明了该算法的可靠性。
关键词:螺旋锥齿轮;刀具误差;误差分析;数控加工
0 引言
螺旋锥齿轮由于承载能力大、传动平稳等特性而被广泛应用于农林机械、汽车、工程机械、矿山机械等领域。它因形状复杂、技术问题多、制造难度大,故一直以来深为业界所重视。齿面精度直接影响传递运动的准确性、传递运动的平稳性和载荷分布的均匀性,齿轮的精度越高,传递的运动精度越高,机械效率越高,承载能力越强,耐磨性越好,疲劳寿命越长,机械振动和噪声越小。齿面成形精度主要取决于齿轮加工工艺方法、机床的动静态精度、齿轮刀具精度三方面[1]。国内外学者对复杂齿面误差模型及修正技术作了大量研究。如基于摇台型机床的齿面误差修正[2-4],但可调加工参数有限,不能实现高精度误差修正;基于CNC机床各轴误差敏感矩阵的齿面修正[5-9],可实现高阶修正,但求解方法较为困难。文献[10]提出了一种预设二次抛物线几何传动误差与接触路径的螺旋齿锥齿轮拓扑修形加工方法,文献[11]提出了优化承载传动误差(LTE)幅值的准双曲面齿轮修正方法。以上研究均未考虑到加工刀具的精度对齿面精度的影响。切削刀具的几何误差对工件精度的影响包括:一是不同的刀具误差不尽相同,比如定尺寸成形刀具,其误差影响工件的精度;二是刀具的使用过程中,刀具的磨损一定程度上也会产生一定的误差。因此研究刀具误差对螺旋锥齿轮的加工影响,对于提高齿轮加工精度具有非常重要的意义。
本文依据微分几何、包络原理,在不考虑机床运动精度情况下,建立刀具齿廓误差与齿轮齿廓误差之间的定量映射关系模型,并对刀具半径误差值进行了计算,为了减小刀盘偏差所带来的齿面加工精度的下降,在开发螺旋锥齿轮数控系统时设计了刀补量,并推导出其计算式。为了验证该补偿量的正确性,进行了仿真加工实验,通过设计开发的专门获取齿面点的插件,对比说明该补偿量能有效减小齿面误差。
1 刀具误差与齿面误差的关系
1.1 刀具廓形
1.1.1 刀具实际廓形
螺旋锥齿轮数控加工机床结构如图1a所示,直接用计算机控制三个直线轴X、Y、Z,以及三个转动轴A、B、C,用X轴与Y轴的联合运动模拟摇台的运动。按照图1b建立螺旋锥齿轮加工坐标系。
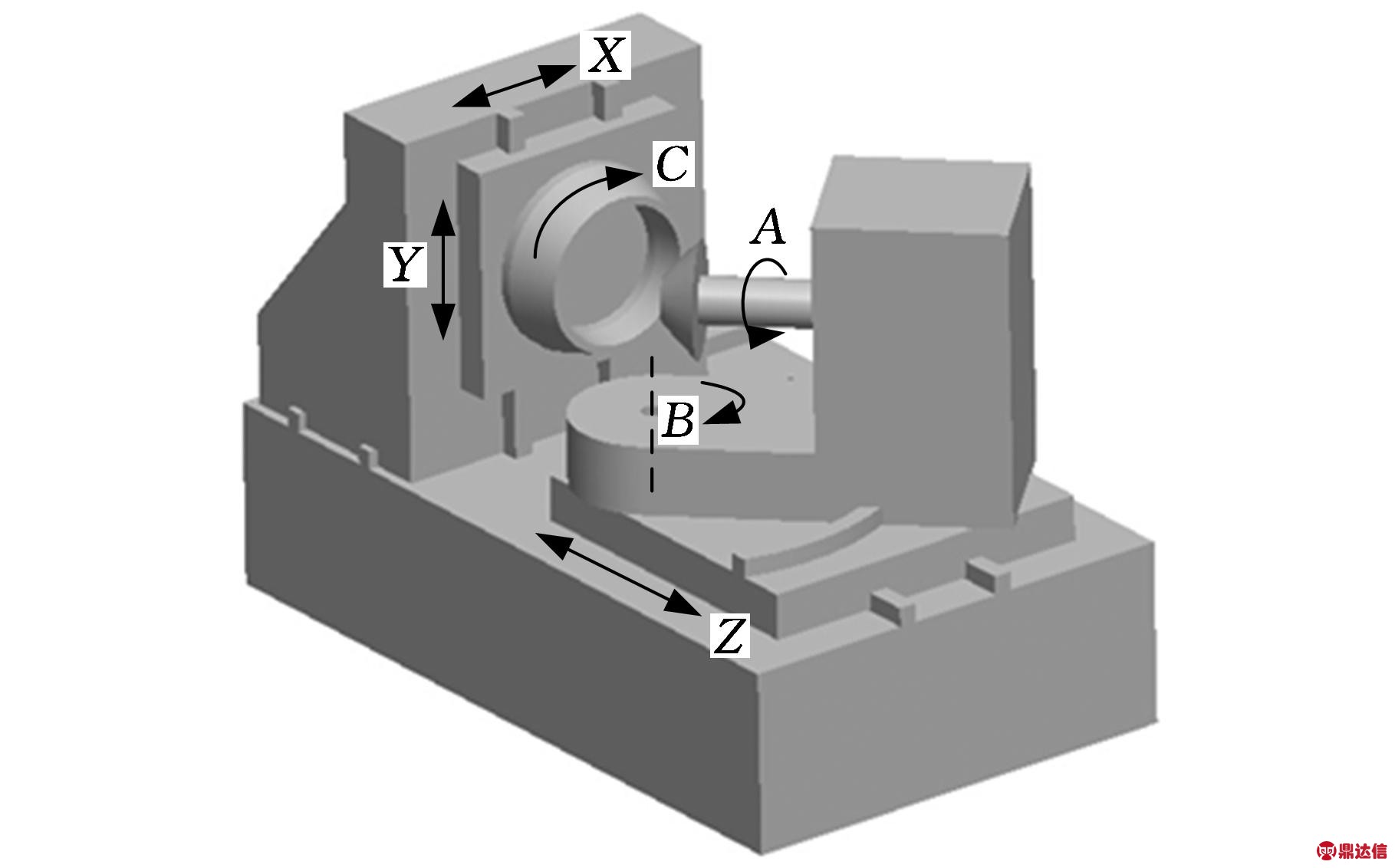
(a)螺旋锥齿轮数控加工机床简图
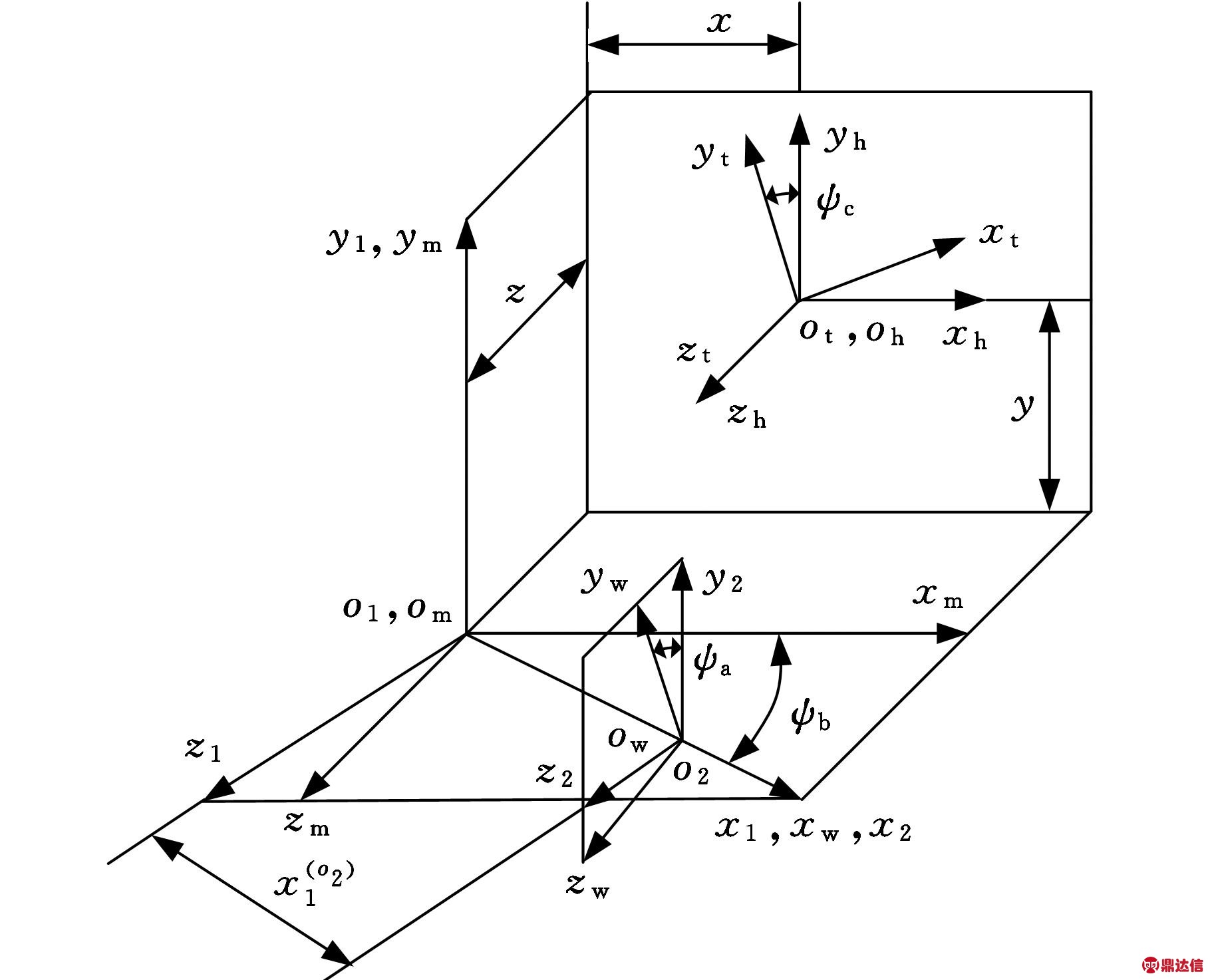
(b)螺旋锥齿轮坐标系
图1 螺旋锥齿轮数控加工机床及其坐标系
依据微分几何包络原理,可以得出刀具坐标系St(otxtytzt)与工件动坐标系Sw(owxwywzw)的坐标转换关系:
rt=MthMhmMm1M12M2wrw
(1)
式中,rt为刀具位矢;Mth、Mhm、Mm1、M12、M2w为从被加工螺旋锥齿轮齿面到刀具的坐标变换矩阵;rw为工件齿向修形齿面位矢。
根据坐标系的关系,式(1)可展开为
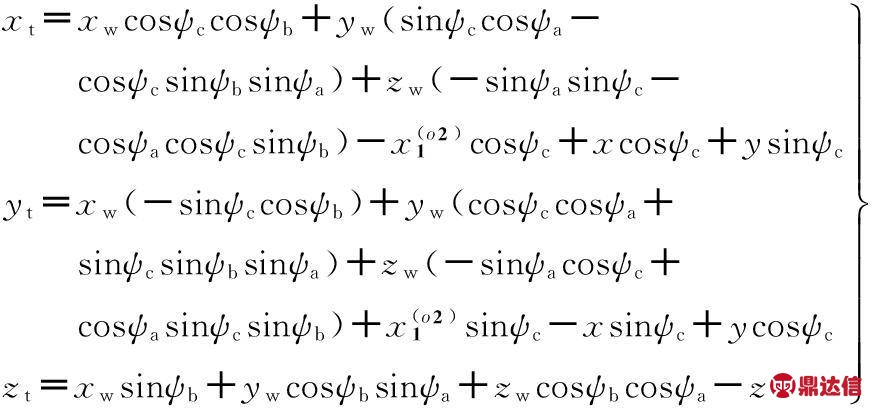
(2)
根据文献[11]所推导的螺旋锥齿轮数控展成法加工中各个数控轴运动公式可以得出,x、y与ψa有联动关系,即
(3)
式中,Sr为径向刀位;θc为角向刀位(初始摇台角);φc为C轴转角;XB为床位;XP为水平轮位;γm为轮坯安装角;![]() 为轮坯安装距;Em为垂直轮位;icp为滚比。
为轮坯安装距;Em为垂直轮位;icp为滚比。
一旦工件的转角已知,则机床运动的三个坐标轴x、y、z也就可以确定了。
1.1.2 刀具理论廓形
刀具的切割面理论廓形主要由直线组成,如图2所示。刀片每一侧可分为两段,每段各生成齿轮的一个子表面,刀片倾斜角为αg的直线段部分主要生成轮齿工作面,而刀片中半径为ρw的圆弧段将生成齿轮齿根部分的圆角。在加工过程中刀具的切割面主要是由刀具绕着轴zg旋转角度θg生成的。因此,刀具的切割面就可以看作是一个圆锥体和由圆弧为母线构成的圆环面。
(a)刀具截面形状
(b)内刀面(c)外刀面
图2 直线廓形盘状铣刀
按照以上对生成齿面的分析,可以将刀具切割面分成两部分,即一部分为倾斜角为αg的直线段(图2中刀具截面形状的a部分),和生成齿面齿根部分的圆弧段(图2中刀具截面的b部分)。 刀具截面形状的a部分可以用空间向量函数表示:

(4)
其中,Sg、θg为刀具面的参数,αg为刀具齿形角,Rg为刀具的名义半径,切割凹面的时候选择符号“+”,凸面时选择符号“-”。
式(4)得到了盘状铣刀的齿廓方程,即铣刀盘包络产生齿轮齿廓的母面方程。根据齿轮的加工原理,可以计算得到铣刀盘理论齿廓包络生成螺旋锥齿轮的理论齿廓方程,即

(5)
1.2 刀盘半径偏差与齿面误差的关系
1.2.1 刀盘半径偏差推导
由式(4)可以看出,对刀具的形状、大小有直接影响的是刀盘半径,因此对于螺旋锥齿轮加工刀具盘状铣刀,刀盘的半径偏差可导致整个刀面偏移,从而导致加工齿面出现齿廓偏差。设刀盘半径偏差为ΔRg,则含误差的刀盘方程为
(6)
结合螺旋锥齿轮加工原理以及微分方程,得到由式(6)包络产生的带有刀具半径误差的螺旋锥齿轮齿面方程:
(7)
于是结合式(5)通过计算得出齿面点关于刀盘半径偏差ΔRg的函数表达式为
(8)
由式(8)可以看出,刀盘半径的偏差导致齿面点在xt、yt、zt三个方向都有误差,即出现齿廓误差,且各个方向的误差位移量都是刀盘半径偏差ΔRg的一次函数;并且在不同的齿面点处其误差量也不同。
1.2.2 刀盘半径偏差对齿面影响
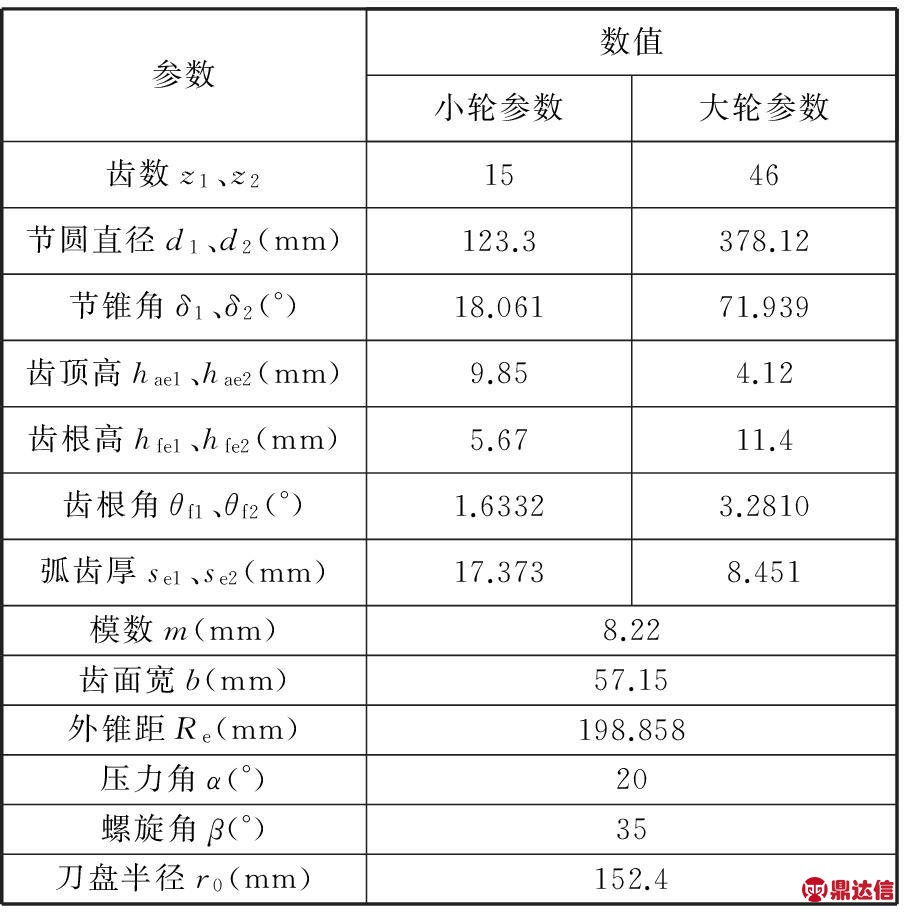
为了更形象地说明刀盘半径偏差与齿廓误差的关系,在MATLAB里进行仿真,仿真结果如图3~图5所示。所采用的螺旋锥齿轮数据如表1所示。
图3 螺旋锥齿轮凹面大端各方向误差与刀盘半径偏差的关系曲线
图4 螺旋锥齿轮凹面中部各方向误差与刀盘半径偏差的关系曲线
图5 螺旋锥齿轮凹面小端各方向误差与刀盘半径偏差的关系曲线
表1 仿真中采用的齿轮参数和刀具参数
从图3~图5可以看出,螺旋锥齿轮凹面点xt、yt、zt三个方向的误差随着ΔRg的增大而增大;在同一刀盘半径偏差ΔRg下,齿面不同点处其误差值不同;图3中显示,越靠近大端,yt方向的误差越大;相反,在图5中,zt方向误差愈靠近小端越大;比较3幅图,齿面点yt、zt方向受刀盘半径偏差ΔRg的影响较大,而齿面点xt方向误差受刀盘半径偏差ΔRg的影响较小。
2 刀具实际截形误差计算
螺旋锥齿轮展成法加工的齿面是刀具回转面的包络,根据螺旋锥齿轮局部啮合原理,工件与刀具回转面之间任一瞬时为空间点接触,接触点既在工件齿面上也在刀具回转面上,因此求出满足空间啮合条件的接触点就可以求出刀具回转面上的点,将得到的回转面上的点转至刀具平面即可得到刀具截形。因此可以通过逆解的方法求算出实际刀具截形。根据图1所示的螺旋锥齿轮数控加工运动关系,被加工齿面位矢、法矢分别为
rw(Sg,θg,φg)=
Mw2M21M1mMmhMhtrt(Sg,θg)
(9)

(10)
‖![]() ‖
‖
式中,nw为工件齿向修形齿面法矢。
推导出螺旋锥齿轮齿廓方程后,即可通过工件齿廓反算出刀具廓形。按照图1b所示的加工螺旋锥齿轮运动关系,刀具轴向廓形为
(11)

(12)
以上所求为刀具轴向廓形上的离散点,必须将所有的离散点经过拟合成线,才能得到刀具的轴向廓形。为了精确拟合,采用3次B样条拟合刀具轴向廓形曲线,再将刀具的轴向廓形曲线通过旋转得到工件曲面:

(13)
Rt(u,θ)=Rw(u)M(θ)
(14)
式中,Mc为均匀3次B样条常量矩阵;Vi为样条控制点向量;n为控制点个数;u为样条参数;M(θ)为绕刀具回转轴的旋转变换矩阵。
由以上推导可知,螺旋锥齿轮刀具的实际截形曲线为xoz平面上一系列啮合点的集合,由空间啮合理论求得。将xoz平面上的点坐标标记为(xi,zi)(i=1,2,…,N,N为计算取点的个数)。
由图2所示,螺旋锥齿轮刀具齿面加工处在xoz平面的投影是以αg为角度的一条斜线,可表示为
z=(x-Rg)cotαg
(15)
因此刀具的齿面误差即为实际计算的离散点到理论拟合直线的距离,由式(15),根据点到直线的距离公式,第i点对应的刀具齿面误差值为
(16)
根据国家标准GB/T 6084-2001,齿轮加工刀具齿廓误差的规定如下:在检查截面中的测量范围内,容纳实际齿廓的两条理论直线齿廓间法向距离。因此,齿廓最大误差是在理论齿廓的基础上偏离公差带的1/2,如图6所示。
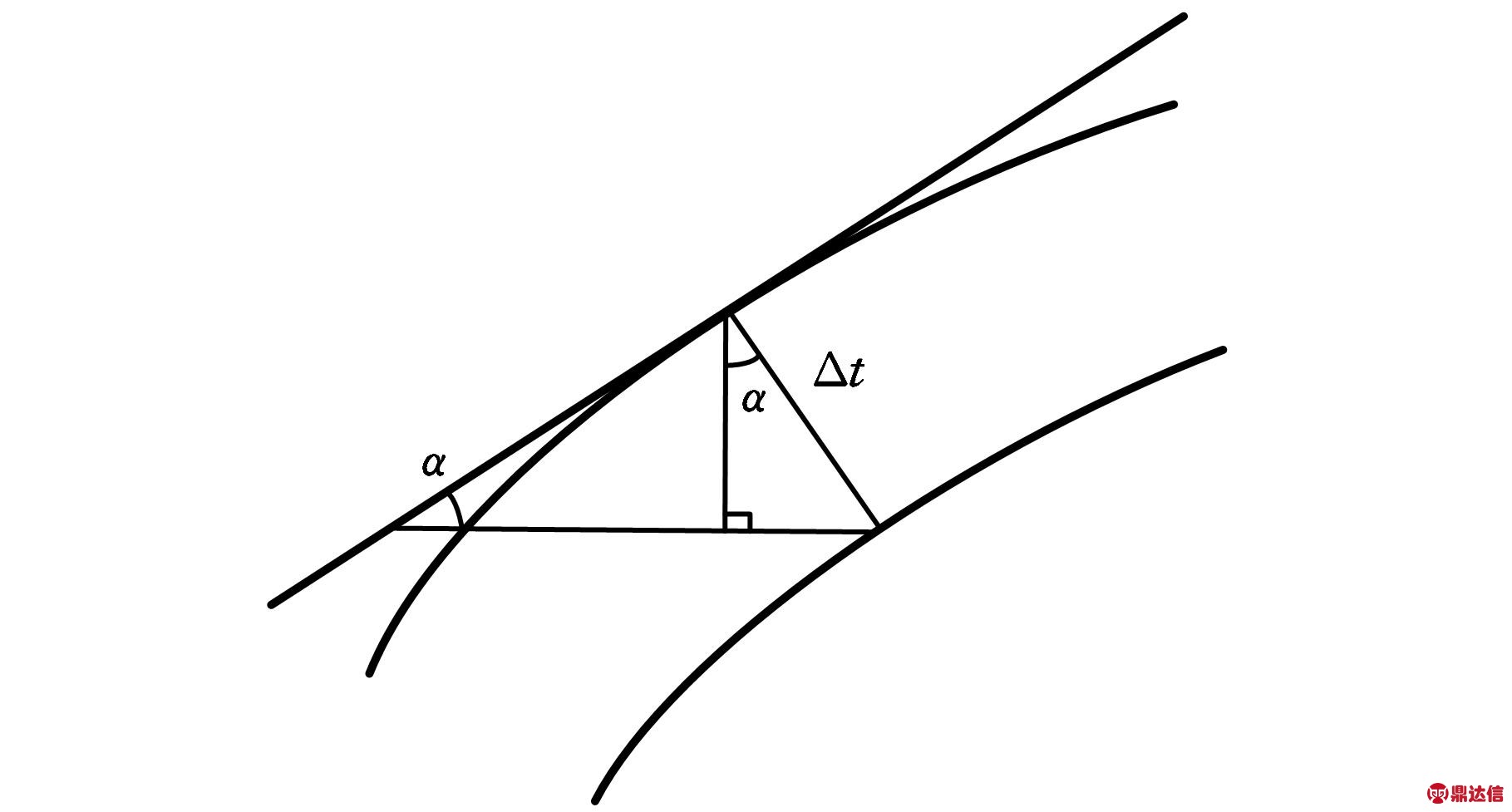
图6 齿廓误差示意图
若根据上面所推导的刀盘齿面法向误差ε>Δt,对于整体式刀盘则需要换刀加工,对于分体式刀盘,则需要调整刀片的位置或更换刀片;若根据上面所推导的刀盘齿面法向误差ε≤Δt,则该刀盘不需要调整。上面根据所加工出来的工件齿面点反算出来的刀具齿面点误差,对于螺旋锥齿轮磨齿数控加工和砂轮的修整具有重要的指导意义。
3 刀具误差补偿理论
由于夹具位置或刀具磨损的改变,导致刀尖点相对于工件的位置或刀尖圆弧半径发生变化,为了减小误差,避免过切和欠切现象,必须对其进行误差补偿。为了减小刀具半径误差造成的加工齿面精度下降,最为有效的办法就是进行刀具误差补偿,也就是刀具位置补偿。在进行螺旋锥齿轮数控加工时,首先需将刀盘和工件的位置调整到初始切削点处,而文献[12]中螺旋锥齿轮数控加工的数学关系是根据传统摇台式加工机床来计算的,因此要进行数控式加工机床的刀具误差的补偿,需从摇台式加工机床的刀具和工件位置的推导出发。文献[13]详细推导了摇台式加工机床展成法、成形法、变性法和刀倾法加工调整参数的计算公式。下面以展成法为例说明刀具误差补偿值的计算。
图7 展成法加工右旋齿轮位置图
图7为展成法加工右旋齿轮的刀具与工件的位置图。要得到机床调整参数,需先确定刀具、齿轮、机床的位置,图7中它们是通过求取产形轮节锥参数而得到的。因为采用展成法加工大轮时,产形轮与大轮构成一对螺旋锥齿轮传动,大轮刀盘的切削面和大轮齿面构成了一对完全共扼的曲面。大轮工艺节锥一方面和相配的小轮构成一对齿轮副,另一方面又和大轮产形轮构成一对齿轮副。前一对齿轮副的极限压力角![]() 和极限半径
和极限半径![]() 已经求出,后一对齿轮副的极限压力角
已经求出,后一对齿轮副的极限压力角![]() 和极限半径
和极限半径![]() 为
为
(17)
则产形轮节锥参数中的节锥距R02和节点螺旋角β02的计算公式为
(18)
式中,Ra1为小轮节锥半径;δa1为小轮的面锥角;βa1为小轮面锥螺旋角;δf2为大轮节锥角;βf2为大轮螺旋角;Rf2为大轮节锥半径。
图7中,O为产形轮轴线和刀尖平面的交点,称为机床中心;O0是刀盘中心;S2为径向刀位;q2为角向刀位;E02为偏置距离。设XB2为床位,X2称轴向轮位修正值,简称轴向轮位,δM2为轮坯安装角气δM2=δf2 (节锥角),i02为产形轮与大轮的传动比,r2为大轮节锥距,从图7几何关系可以算出:
(19)
q2=βf2+j2
(20)

(21)
(22)
(23)
(24)
从式(19)和式(20)可以看出,刀盘半径r0直接对角向刀位q2有影响,进而影响摇台初始角的计算公式:
(25)
式中,β为摇台式加工机床的偏心角。
为了补偿刀盘半径偏差所带来的齿面加工误差,在进行螺旋锥齿轮数控系统开发时,为刀具误差补偿设计一个刀片补偿量Δr0,因此式(19)就可以变为含刀补量的式子:

(26)
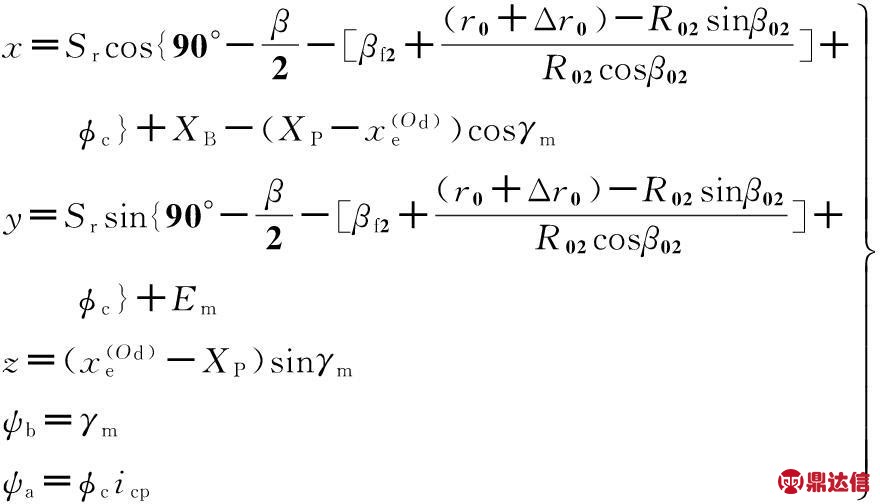
结合所推导数控加工机床展成法中各数控轴运动关系(式(3)、式(20) 、式(25) 、式(26))可得
(27)
式中,![]() 为机械式加工机床中轮坯安装距。
为机械式加工机床中轮坯安装距。
式(27)为展成法加工右旋齿轮的各数控轴添加了刀具补偿的运动关系式,从式中可以看出添加了刀具补偿之后最终将会影响x轴和y轴的数值,这也就是说刀盘半径偏差的补偿将由刀盘运动位置来补偿。
4 补偿仿真实验
螺旋锥齿轮的铣齿加工就是金属切削加工,也就是工件和刀具相对运动实现的过程。刀具要从工件上切除金属,也就要求刀具和工件在加工过程中存在瞬时重叠区域,而这个瞬时重叠区域就是要被切除的金属。若把切削过程细分成许多的微切削段,这些微细段的切削就可以看作是在毛坯工件上减去它与刀具重叠的区域,在三维仿真加工里该运动被称为两个实体即工件与刀具实体作布尔减运算。因此在三维仿真软件中我们先按照参数绘制工件毛坯和刀具的三维实体,接着根据所推导的刀具与工件加工过程中的相对运动式(3),让两实体运动,并利用三维实体进行布尔减运算来仿真整个加工过程。本文通过在VB中调用SolidWorks API的属性和方法,建立螺旋锥齿轮毛坯和刀具的参数化模型,并进行虚拟加工。螺旋锥齿轮的数控加工过程一般包括加工位置调整、铣削运动、退刀运动。在虚拟加工过程中,为了简化仿真过程,对退刀运动等一些不影响仿真结果的辅助运动不予考虑。
按照表1的齿轮的基本参数,计算出齿坯的基本参数,并按照文献[14]计算出刀盘与大轮轮坯的位置参数,在初始时刻φc为0,代入式(3)计算出刀盘与大轮轮坯的位置在机床坐标系下的位置,按照此时的位置调整已经造型好的轮坯与刀盘。加工初始位置如图8所示。
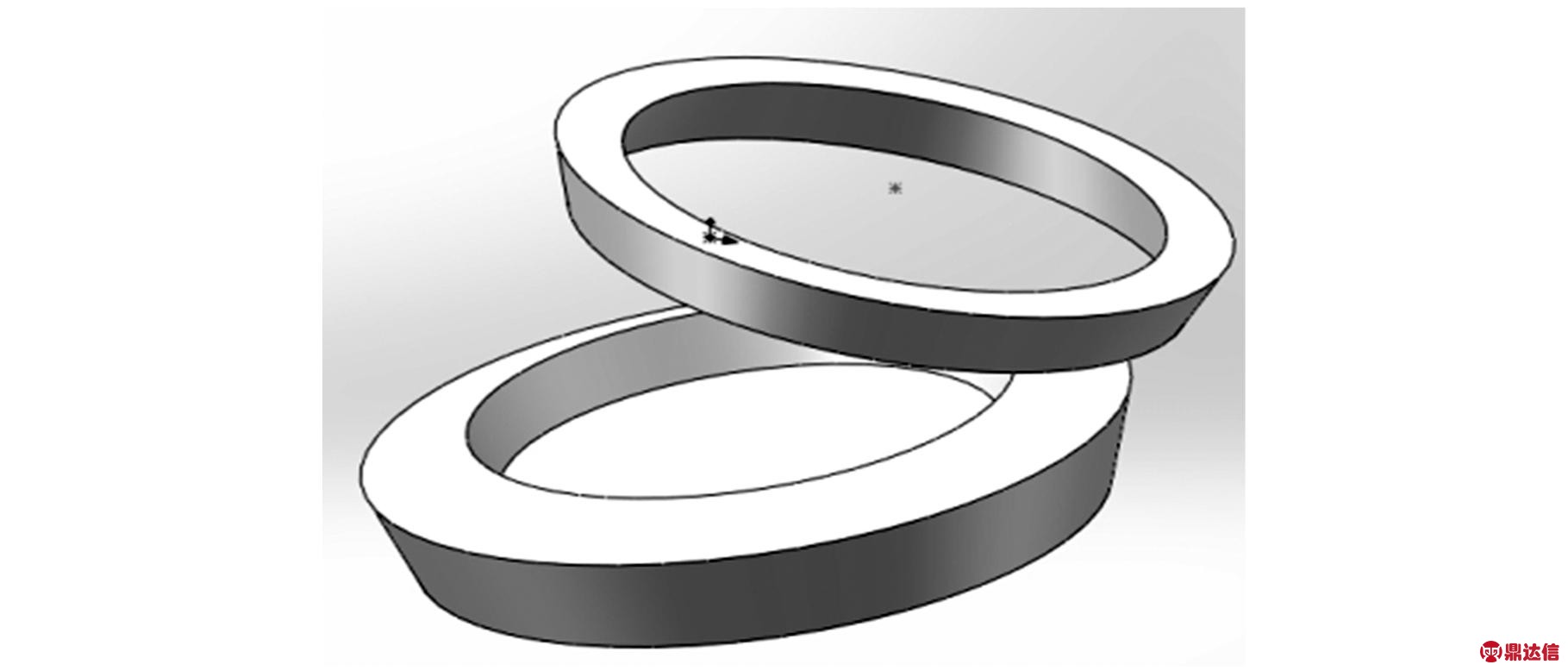
图8 刀盘与轮坯初始加工位置
在虚拟加工中,当轮坯绕其中心旋转角Δψa时,刀盘的位置在机床中与x轴的夹角变为
φc=(ψa+Δψa)/icp
(28)
在对应的Δψa位置上,可以得到相应的切削面接触线,无数个切削面的接触线则构成了齿面。最后仿真加工出理论的不含刀具误差的螺旋锥齿轮大轮,如图9所示。
图9 大轮展成法加工理论结果
为了进一步说明刀具误差对齿面的影响,以及验证所推导刀具误差补偿公式的可靠性,在SolidWorks里进行5组实验。即:理论齿面(无刀具误差情况下的虚拟加工齿面)、刀具平均半径误差(ΔRg=0.5 mm)在下齿面、补偿刀具误差(ΔRg=0.2 mm)在下齿面、刀具平均半径误差(ΔRg=0.5 mm)在下齿面,以及补偿刀具误差(ΔRg=0.2 mm)在下齿面。分别采取每次加工时的齿面数据。由第3节可知刀具半径误差其实是一个平均值,为了使虚拟加工时的数据更为贴近实际的加工,当进行刀具半径有误差情况下的仿真加工时,将刀具齿面用一些离散点拟合并使平均误差满足设定的条件,如图10所示。
图10 误差情况下的刀具齿面截形
为了获取螺旋锥齿轮齿面点的坐标位置信息,在SolidWorks里对三维模型上点坐标提取进行插件的开发,实现了螺旋锥齿轮齿廓点坐标的获取输出。由于采取的是非连续的展成法虚拟加工,每加工一个轮齿分度一次,每个齿面的信息是一样的,因此只需要采集一个齿面的数据。
将采集的齿面数据保存,并进行数据对比分析,如图11和图12所示。图11为刀具半径误差为0.5 mm时齿面各个方向误差值以及补偿后的误差值,图12为刀具半径误差为0.2 mm时齿面各个方向误差值以及补偿后的误差值。两图的横坐标表示齿面点从左至右为大端到小端,纵坐标为齿面误差值。对比两图可知:
(1)当刀具半径误差为0.5 mm时齿面的y向误差最大达到0.5 mm,大于刀具半径误差为0.2 mm时齿面误差值,这说明了刀具误差越大齿面的误差也就越大;
(2)从两图都可看出,刀具误差对齿面y向的大端影响较大;
(3)相反,刀具误差对齿面z向的小端影响较大;
(4)对齿面的x向影响较小,可能主要是因为刀具半径误差的方向正好是齿宽方向,而展成法加工是从大端向小端的加工,前一道刀序的误差可以用后一道刀序弥补;
(5)两图也证明采用本文所推导的刀具误差补偿公式,可以有效进行齿面误差补偿。
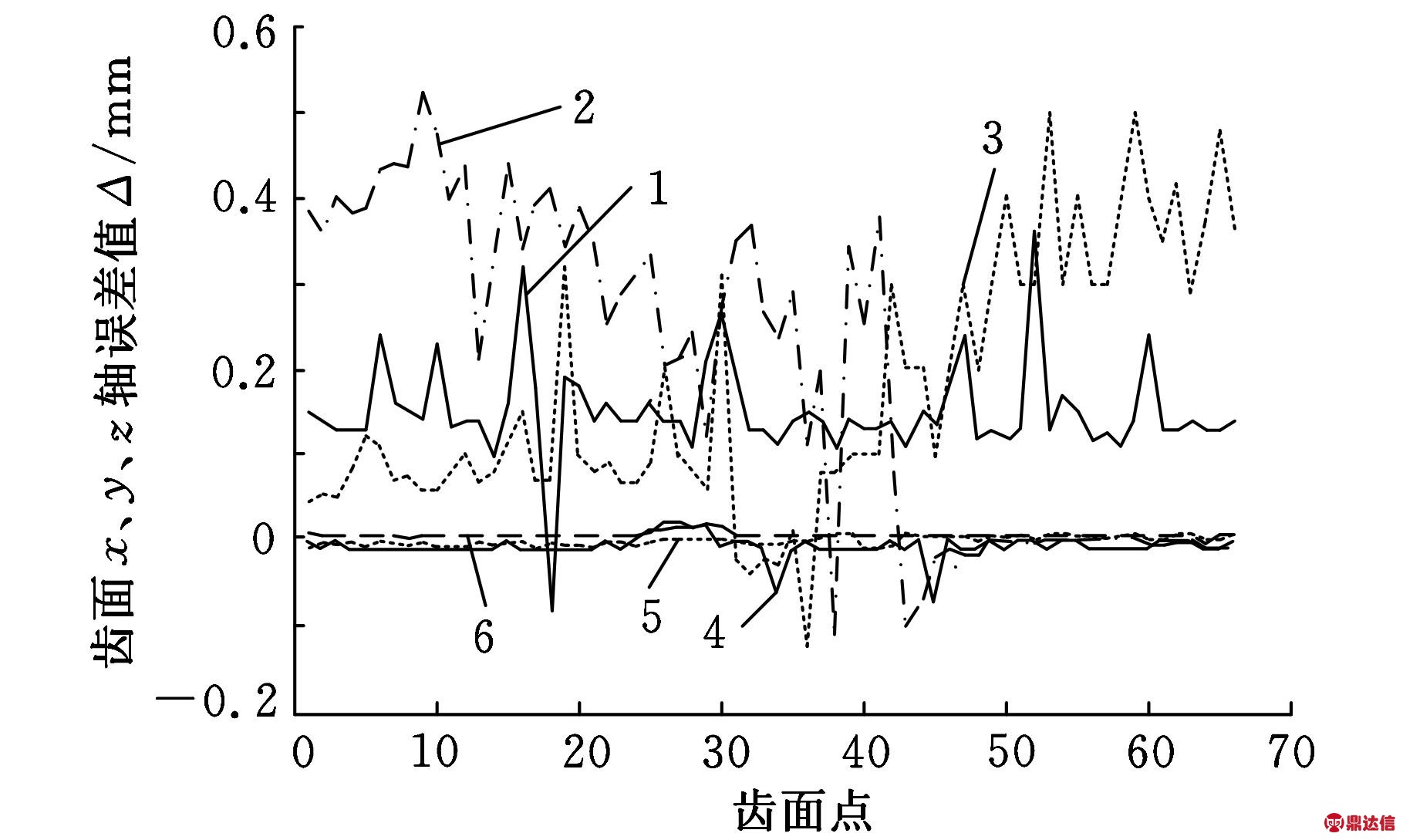
1.补偿前x方向 2.补偿前y方向 3.补偿前z方向
4.补偿后x方向 5.补偿后y方向 6.补偿后z方向
图11 刀具误差为0.5 mm时补偿前后齿面误差值
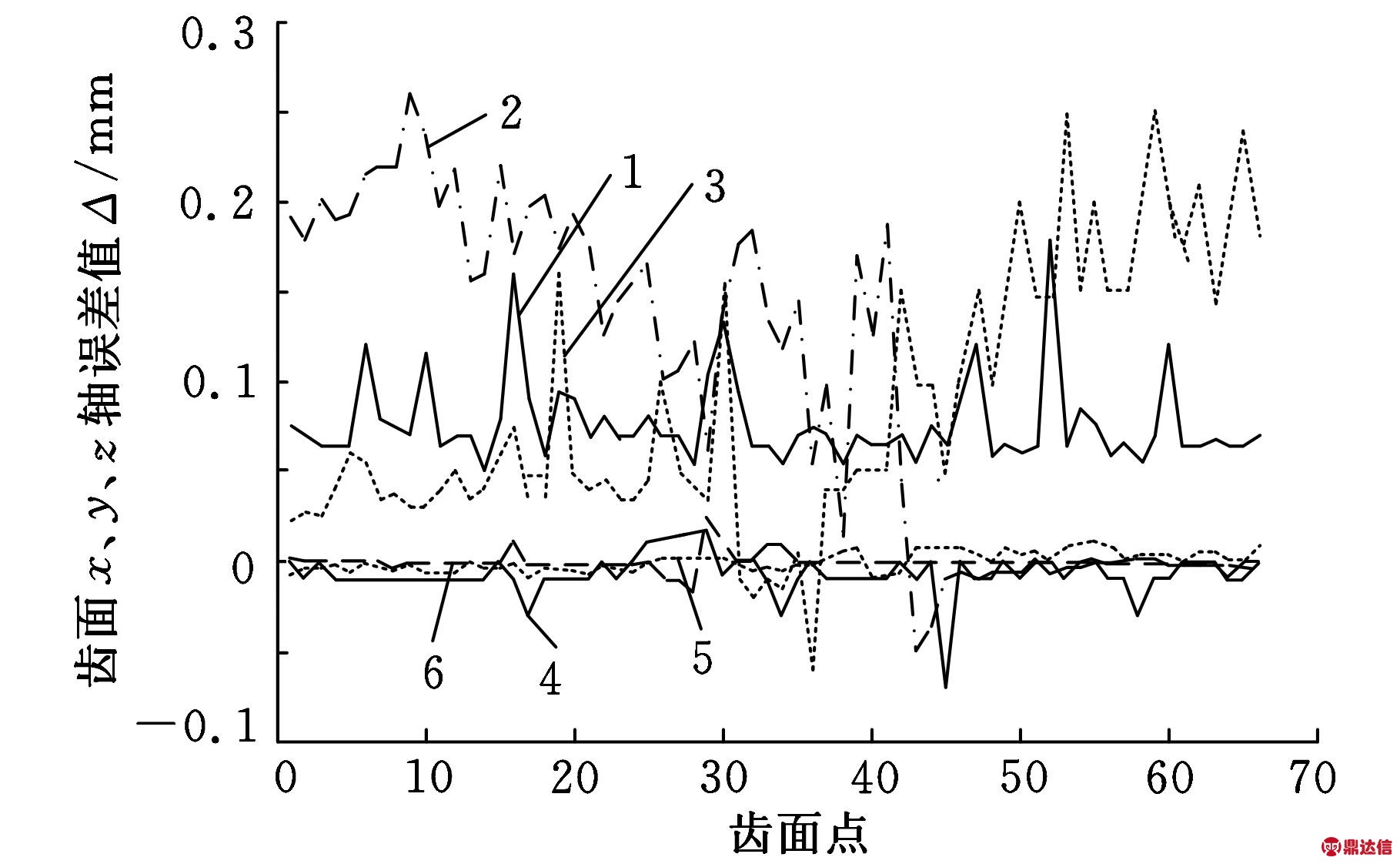
1.补偿前x方向 2.补偿前y方向 3.补偿前z方向
4.补偿后x方向 5.补偿后y方向 6.补偿后z方向
图12 刀具误差为0.2 mm时补偿前后齿面误差值
5 刀具误差补偿软件开发
软件误差补偿主要研究数控机床误差的影响因素以及计算机软件误差补偿技术,从而提高数控机床的精度和效率。软件误差补偿的特点是不需改变加工设备或采用硬件电路等辅助设备即可提高数控机床的加工精度[15]。本文依据微分几何、包络原理,在不考虑机床运动精度情况下,推导出了刀具半径偏差与齿轮齿廓误差之间的定量映射关系模型,采用函数法来进行误差补偿,即用误差补偿程序完成补偿任务,为齿轮机床数控系统提供修正后的控制量输出。将以上算法编写进自主研发的螺旋锥齿轮的ARM+DSP+FPGA国产齿轮数控系统上,其原理如图13所示。
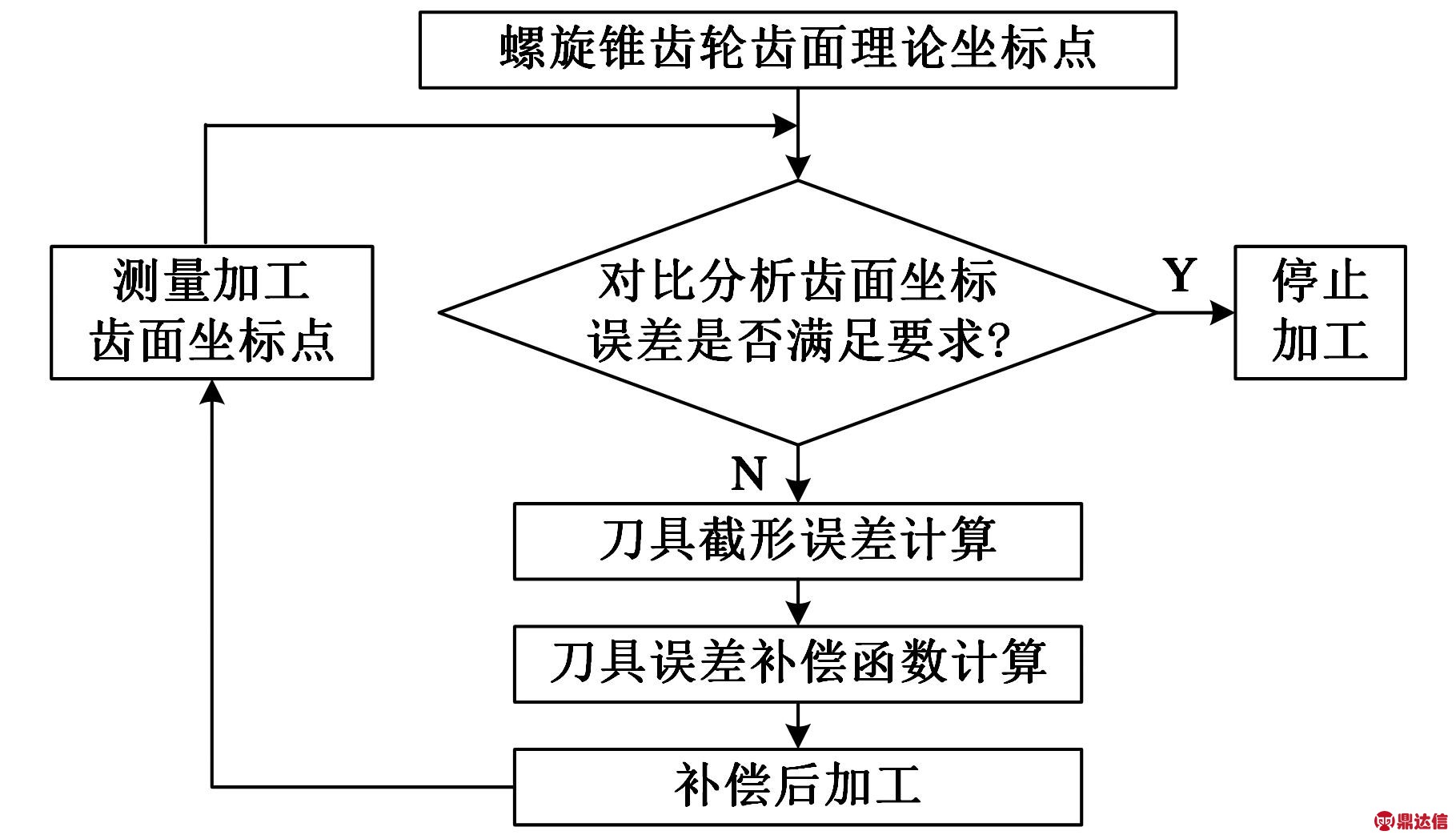
图13 刀具误差补偿原理图
主要的软件程序包括:①螺旋锥齿轮齿面理论值的数控程序;②刀具截形误差计算程序;③刀具误差补偿程序。
在上层的ARM模块里编写以上所需要的各种控制计算程序;在加工过程中,通过底层的DSP控制各轴的运动,并把各轴位置运动量反馈给ARM,可以有效地控制刀具误差。
6 结论
本文依据微分几何、包络原理,在不考虑机床运动精度情况下,推导出了刀盘半径偏差与齿轮齿廓误差之间的定量映射关系模型;并在MATLAB中对刀盘半径偏差和刀具齿形角偏差对齿面的影响进行了仿真模拟,螺旋锥齿轮齿面点xt、yt、zt三个方向的误差随着ΔRg的增大而增大,刀盘半径偏差对齿面点的影响较显著,刀盘半径偏差不可忽视,应进行补偿;对刀盘半径偏差值进行了计算,为了减小刀盘半径偏差所带来的齿面加工精度的下降,在开发螺旋锥齿轮数控系统时设计了刀补量,推导出其计算公式,并进行了实验验证,证明该补偿算法的正确性;将该算法运用于螺旋锥齿轮数控加工系统中,对提高螺旋锥齿轮数控加工的精度具有较好的参考意义。


