
摘 要:在一些特殊的工程应用中,常采用蓄能器作为动力源为电液位置控制系统提供压力油。与传统的电液位置控制系统不同,当采用蓄能器供油时,蓄能器出口的油液压力会逐渐降低,而压力的变化会对系统的控制性能产生较大的影响。针对这种变压力油源的电液位置控制系统,搭建了以蓄能器为动力源的电液位置控制系统实验平台,并建立了严格数学模型。通过实验手段确定了蓄能器供油压力与排油体积的关系、以及基于LUGRE模型的精确的系统摩擦力模型,以便实现系统运动过程中的有效动态补偿。构建了一种基于PID控制器+前馈补偿器+模糊控制器联合作用的复合补偿控制器,有效地降低了系统工作过程中供油压力降低、摩擦力变化等因素对实际控制性能造成的影响。通过与传统控制方法的对比实验,验证了所提出的控制算法的有效性。
关键词:蓄能器;电液位置控制;变压力控制;前馈补偿;模糊控制;复合补偿控制
引言
电液控制系统(包括电液位置/速度/力控制系统)因为具有功率密度比大、刚度高、响应速度快等优势,在冶金机械、压力加工机械、动静态加载试验机以及多种机器人等领域得到广泛的应用[1]。传统的基于阀控的电液控制系统,一般采用定量泵为系统提供压力油源[1],而蓄能器经常被用来临时补充或者吸收压力脉动[2]。但是,存在一些特殊的系统,比如运动模拟系统、一些特殊元件的测试系统等,执行机构要求在短时间内以较高的速度重载运行,或者做周期性的间歇运动。诸如此类系统,可以采用一个小功率泵站在执行机构运行间歇向蓄能器充液;而在执行机构运动过程中,蓄能器可以在短时间内供给执行机构所需要的足够流量。这样的设计方式可以有效地减小液压泵站的装机功率,同时,在系统运行过程中,液压泵站可以处于关闭或者卸荷状态,因而有效降低了系统发热量,提高了能源的利用率。
对于电液位置控制系统而言,典型的比例+积分+微分(PID)控制器由于易于实现的原因,在工业中得到广泛的应用[3]。但是,对于本研究中所述的基于蓄能器作为动力源的电液位置控制系统而言,在系统运行过程中,蓄能器的供油压力会随着排油量增加而快速下降;同时,蓄能器的供油压力也受到环境温度、排油速度以及蓄能器初始充气压力等多方面因素的影响[4],具有较强的非线性特性,而这将会对系统的控制性能造成很大影响。同时,与传统的阀控系统一样,电液控制系统所固有的诸如比例阀/伺服阀死区、摩擦力干扰等诸多非线性因素,以及液压管路初始容积、液压油体积模量、内外泄漏系数、比例阀/伺服阀流量系数的不确定性等[5]因素,也使传统的PID控制器难以获得较好的控制效果。
为了提高电液控制系统的控制精度,许多先进的算法被提出。模糊控制就是智能控制手段的一种典型应用,这种算法模拟了人类的逻辑思维,并且不容易受到系统数学模型建模精度的影响[6]。文献[7]在液压压机中采用自整定模糊控制器克服液压系统非线性因素并取得了较好的效果,文献[8]综合了传统的PID控制器与模糊控制器,并将其应用在典型的位置控制系统上,实现了液压执行器位置的精确控制。而这些控制算法当前主要应用于传统的基于液压泵站供油的系统,并没有考虑供油压力变化的影响,若应用于本研究所提出的这类系统,势必会带来较大的跟踪误差。
随着现代控制技术的发展,基于状态空间的自适应控制方法也得到广泛的应用。Guan、Yao等人分别针对液压缸和液压马达的自适应控制方法做过深入的研究,提出了有效的控制算法与系统未知参数在线估计方法,并在试验中获得了非常好的控制效果[5,9]。但是这类算法的在线计算量通常非常大,对控制器性能要求较高,同时,需要实时采集液压执行器进、出油口压力信号、供油压力信号、回油压力信号以及阀芯位移信号等,无疑会极大增加系统成本;并且,在控制过程中需要通过微分方法来获取液压执行器的速度与加速度信息。而实际工业应用过程中,即使引入低通滤波器,现场环境特别是强磁场的干扰,也会导致对传感器信号的微分过程引入较大的噪音。
在过去的几年里,一些学者就蓄能器在能量再生领域的应用以及蓄能器对液压系统性能的影响等方面做了深入的研究[10],但是对于本研究所提到的这类有关基于蓄能器变压力供油的电液位置控制系统的控制问题,仍然没有很好的解决办法。
在本研究中,余下具体的章节安排如下:首先,对引言中所提及的,基于蓄能器供油的电液位置系统进行详细的介绍,通过与实验相结合的手段,精确建立所描述的液压控制系统的数学模型,并进行详细的分析;其次,完成以蓄能器作为动力源的电液位置控制系统的控制器的设计;接着,进行对比实验并对实验结果进行分析,验证所提出控制算法的有效性;最后,给出主要的结论。
1 系统描述与建模
一个典型的基于蓄能器供油的电液位置控制系统如图1所示,这个系统被应用于一个特殊的用于临床研究的步态模拟器中,用于驱动一个夹持足踝的倒装的Stewart并联驱动机械手,实现人体步行过程中一个步态的模拟。考虑到Stewart并联驱动机械手的工作空间无法满足步态模拟过程中,被试足踝沿其行走方向的位移要求,利用如图1所示液压缸实现足踝沿其行走方向的轨迹跟踪,而被驱动的Stewart并联驱动机械手则用来实现其它5个自由度的足踝的运动轨迹模拟。在系统的工作过程中,液压缸将会按照给定轨迹驱动一个重型负载:Stewart并联驱动机械手,实现一次步态模拟。如果按液压系统最大的运行功率配置液压泵站,会导致系统成本非常高昂。因此,采用了一个小的液压泵站为一个16 L的蓄能器充液,当蓄能器内部压力以及充液量满足使用要求以后,关闭液压泵站,同时以蓄能器作为油源,开始进行步态模拟。此时,采用Atos公司的一款伺服比例阀控制液压缸按给定轨迹驱动Stewart并联驱动机械手沿水平导轨方向运动。液压泵站出口、蓄能器出口、液压缸进口与出口均预先安装压力传感器,同时,在液压缸一侧安装了位移传感器。

图1 蓄能器变压力供油电液位置控制系统原理图
1.1 皮囊式蓄能器模型
如图1所示,采用皮囊式蓄能器为执行机构提供压力油液,但是蓄能器的出口的压力会随着液压缸的运行而逐渐降低,从而导致液压缸的位置精度降低。在液压系统建模的过程中,需要充分考虑蓄能器的工作状态。在对蓄能器建模的过程中,因为气体的压缩性远大于液压油液,通常忽略皮囊的厚度与质量因素,可以认为蓄能器内部气腔与液腔的压力是一致的,但是需要对蓄能器出口管路进行细致的建模。文献[9]指出,蓄能器皮囊内部的压力与气体温度、容积有关,可以通过Beattie-Bridgman方程进行描述,如式(1)所示:


(1)
式中, Aa、Ba、aa、ba与Ra为Beattie-Bridgman方程常数,通常由皮囊内部的气体特性决定。Va(t)是气体容积,忽略液压油液的可压缩性,可以认为它等效于蓄能器排油体积。Ta(t)为气体温度;ma为气体质量;pa(t) 是气体压力。但是这些参数通常需要实验方法去测量,并且难以取得精确的测试结果。
表1为所设计的液压位置控制系统主要元件参数及等效负载质量。
表1 液压位置控制系统主要元件参数及等效负载质量

通过实验的方法寻找蓄能器输出压力与排油体积的关系。在蓄能器充液达到给定压力以后,将伺服比例阀的阀芯移动到一个固定不变的位置,这时液压缸将逐渐近似以恒定的速度运行,忽略油液压缩性的影响,通过液压缸的位移估算蓄能器排油体积,经过多次重复实验以后,蓄能器排油体积与供油压力如图2所示。
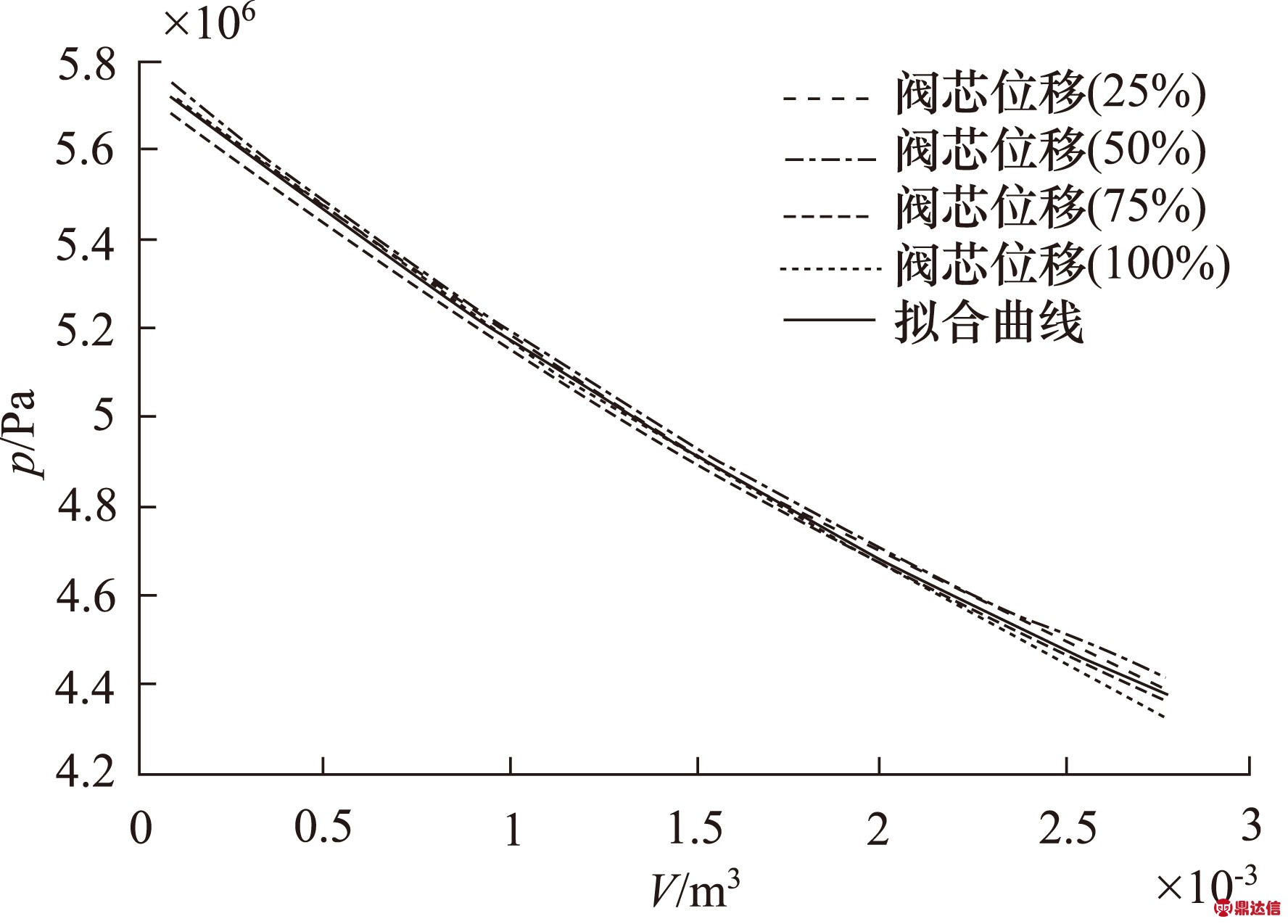
图2 蓄能器排油体积与供油压力关系
采用最小方差方法对实验数据进行拟合,则蓄能器模型可以用式(2)表示为:
ps(ΔV)= 5.427×1010ΔV2-6.549×108ΔV+
5.775×106
(2)
式中, ps为蓄能器供油压力;ΔV为蓄能器排油体积。需要指出的是,式(2)只是一个蓄能器供油压力的估计公式,忽略了温度等因素对蓄能器的影响,但是它可以用于控制器中前馈补偿器的设计,本研究将在2.2节进行阐述。
1.2 伺服比例阀模型
伺服比例阀是液压位置控制系统的核心控制元件,对于本研究所采用的伺服比例阀而言,其阀口输出流量方程如式(3)与式(4)所示:


(3)


(4)
式中, Cd为伺服比例阀流量系数;w为阀芯的面积梯度;Cr为伺服比例阀芯与阀套的径向间隙;xv为伺服比例阀芯位移; ρ为液压油密度;ps为蓄能器供油压力;p1、p2分别为液压缸无杆腔压力和有杆腔压力;pt为液压系统回油压力。当液压缸伸出时,符号函数sign(xv)=1,液压缸缩回时,sign(xv)=-1。通常情况下,当伺服比例阀的频响远高于系统本身的频响时,可以认为伺服比例阀的阀芯位移xv与给定控制信号u呈线性关系,对式(3)与式(4)进行改写,则如式(5)与式(6)所示:
q1=kvu×

(5)
q2=kvu×

(6)
式中, kv为伺服比例阀的流量增益;u为控制信号。
1.3 液压缸动态模型
在系统的操作过程中,液压缸的无杆腔与有杆腔的流量连续性方程如式(7)与式(8)所示:
q1=sign(xv)×

(7)
q2=sign(xv)×

(8)
式中, A1、A2分别为液压缸的无杆腔与有杆腔的截面积;yp为液压缸活塞杆的位移;Cip、Cep分别为液压缸的内泄与外泄系数;V1、V2分别为液压缸无杆腔与有杆腔的容积(包含液压管路容积);βe为是液压油的体积弹性模量。
液压缸活塞杆的动态力平衡方程可以用式(9)表示:

(9)
式中, m为等效到液压缸活塞杆的等效负载质量;f为系统运行过程中的摩擦力;FL为外干扰力。
1.4 摩擦力模型
系统运行过程中的摩擦力一般难以精确计算,但是可以通过实验的方法间接测量得到估计摩擦力fe≈f。如式(9)所示,在系统运行过程中,不存在外干扰力,即FL=0时,给伺服比例阀一个恒定的控制信号,这时液压缸最终将会近似以恒定速度运行,加速度为零。通过大量的重复实验,利用式(9)可以计算液压缸在不同运行速度下的估计摩擦力的大小,如图3所示。
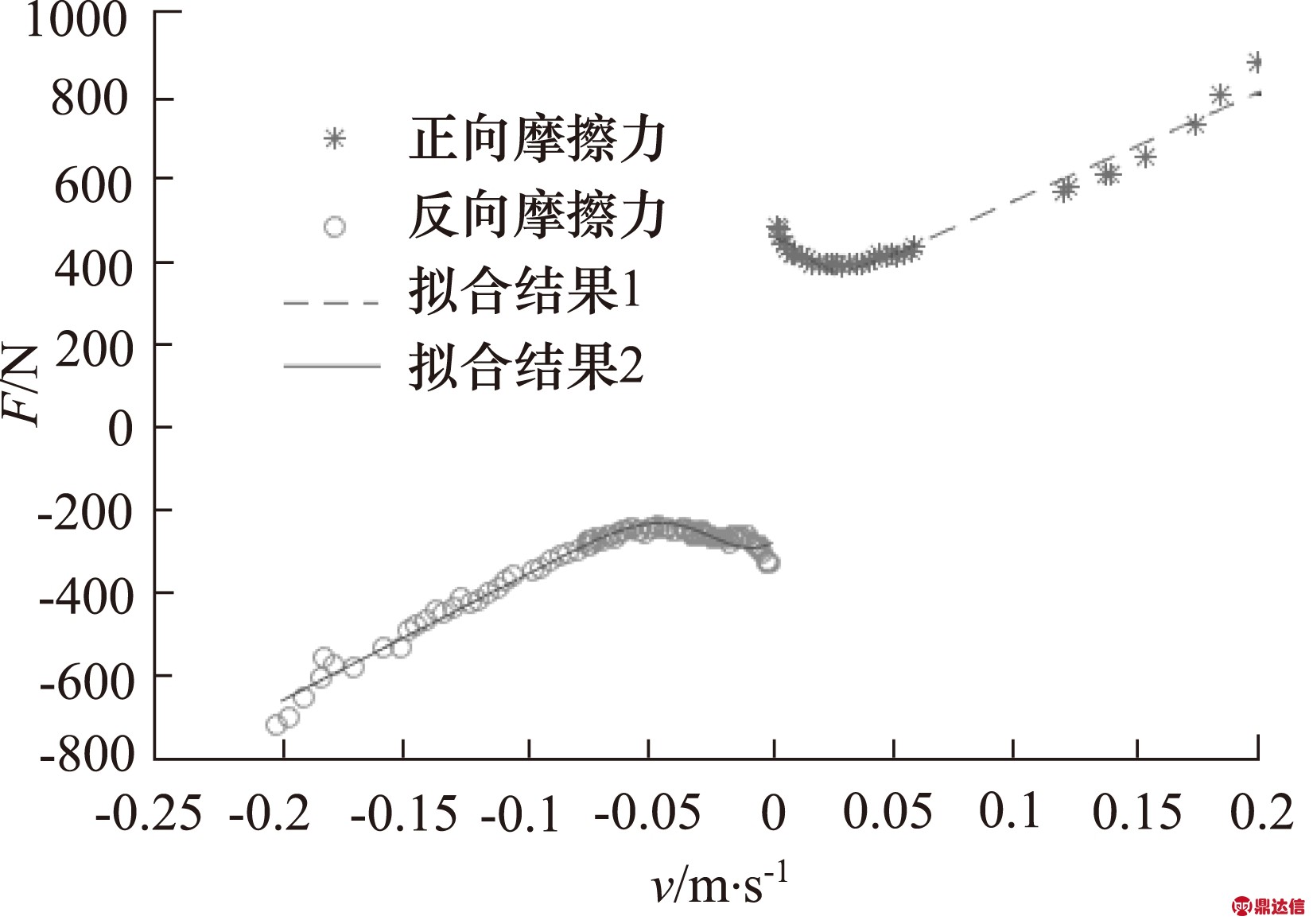
图3 基于实验估算得到的液压系统摩擦力
利用LuGre模型对该曲线进行拟合,如式(10)~式(12)所示:
(11)

(12)
式中, σ0与σ1表示动态摩擦参数如刚度系数与阻尼系数等,静态参数fc, fs,σ2与vs定义为库伦摩擦力、静摩擦力,黏性摩擦力与Stribeck速度。另外,z表征了接触表面的摩擦特性,![]() )描述了Stribeck现象。对于本系统而言,可以认为系统
)描述了Stribeck现象。对于本系统而言,可以认为系统![]() =0,因此有:
=0,因此有:
(13)
系统稳态摩擦力可以表示为:
(14)
式中, fc=σ0α0, fs=σ0(α0+α1),显然,该模型是一个动态摩擦力模型,包含了4个静态参数(fc,fs,σ2,vs)与两个动态参数(σ0,σ1),以及不可测量状态量z。根据实验结果,摩擦力模型参数如表2所示,拟合结果如图3所示。
表2 正向摩擦力模型参数

表3 反向摩擦力模型参数

1.5 供油压力变化的影响
与传统的恒压力油源的液压系统不同,如式(3)与式(4)所示,由于Cr≪xv1,可以近似认为Cr=0。考虑供油压力变化的影响,对其在工作点A(xv0,ps0,p10,p20)附近进行线性化,可以得到:

(15)
(16)
上两式中,一个特殊的流量-压力系数可以被表示为:
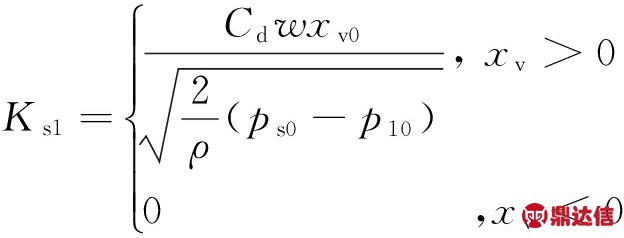
(17)
(18)
可以发现,供油压力下降Δps,将会引起伺服比例阀流量的下降。从动态角度考虑,如果系统发生振动,由于Ks1与Ks2的存在,当供油压力下降时,伺服比例阀的输出流量减小,将会导致系统对振动的抑制能力减弱,从而引起系统阻尼的下降。因此,在控制器设计的过程中,应当充分考虑蓄能器供油压力降低引起的伺服比例阀的输出流量降低,及时对控制信号进行修正。
2 复合补偿控制器设计
充分考虑供油压力降低对液压位置控制系统的影响,设计了一种综合蓄能器输出压力智能补偿与前馈补偿的复合补偿控制器。该控制器包含了一个通用的PID控制器,一个前馈补偿器(FFC)与一个模糊控制器(FC)。如图4所示,前馈控制器用来确保系统的快速跟踪,通过建立的系统数学模型,FFC能够根据液压缸的期望运动轨迹跟踪预先计算出有效的控制信号,从而减小PID控制器的矫正量,提高系统的跟踪精度;而FC则可以根据蓄能器出口压力的变化,智能地调节PID控制器的参数,进一步提高系统的跟踪精度。
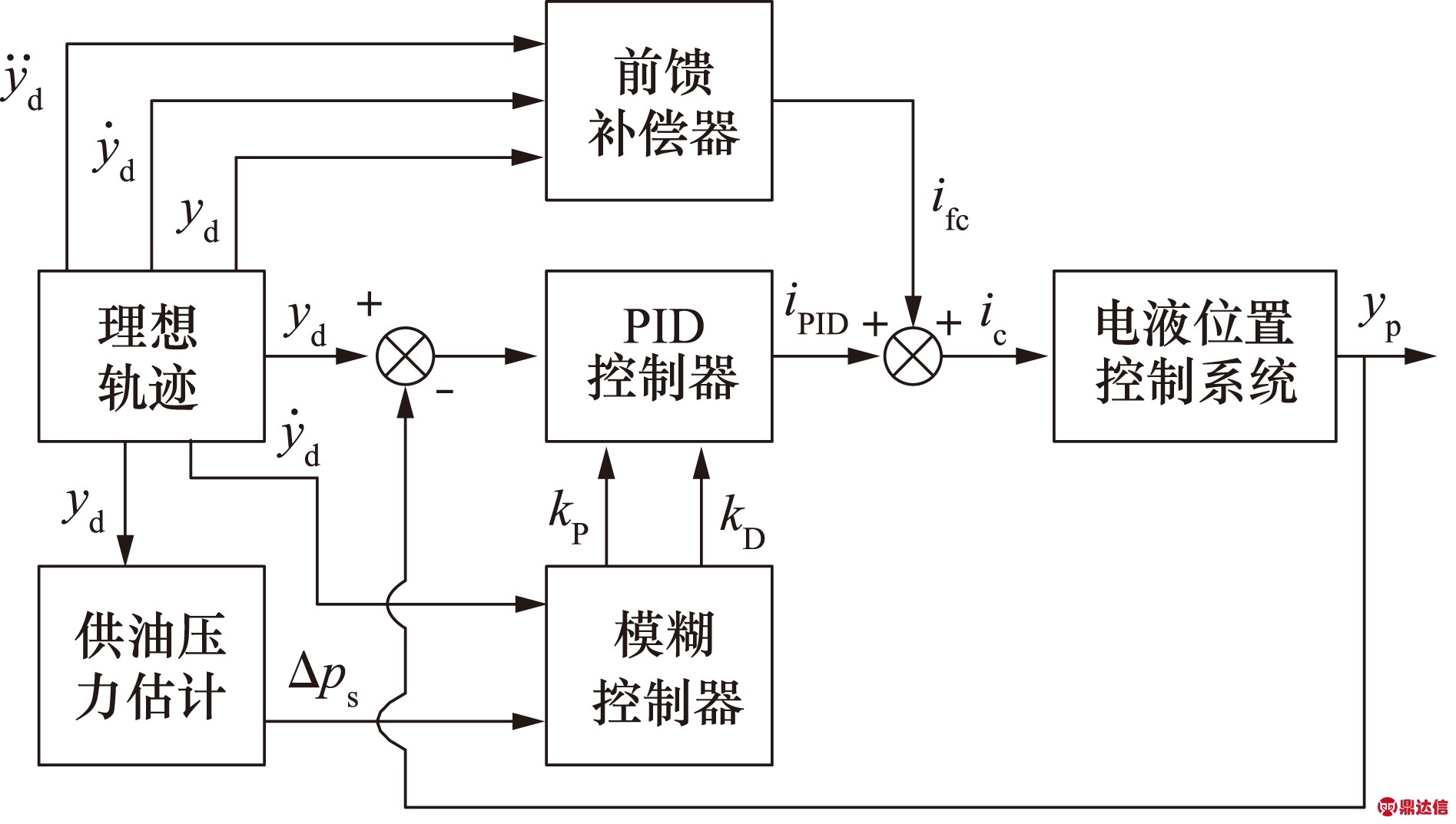
图4 复合补偿控制器原理框图
2.1 PID控制器
离散型PID控制器的设计如式(19)所示:

(19)
式中, u(t)为控制信号;e(t)为系统的跟踪误差;kP为比例增益;TI为积分时间常数;TD为微分常数。
2.2 前馈补偿器(FFC)
在系统运行前,一个理想的有界的期望跟踪轨迹yd已知,且yd的一阶导数![]() d,与二阶导数
d,与二阶导数![]() d均存在且有界,也就是系统的期望运行速度与加速度均存在。FFC可以根据已经推导的系统的数学模型,预先计算一个接近理想控制信号的初始控制信号,以减小PID控制器的矫正量,提高系统的跟踪精度。FFC的结构可以根据系统的逆动力学模型进行设计。假设液压缸的运行轨迹为理想轨迹yd,回油压力pt=0。为了与工程应用近似,考虑到降低系统制造成本等因素,假设系统不存在蓄能器出口的压力传感器、液压缸有杆腔压力传感器与液压缸无杆腔压力传感器。在液压缸活塞杆伸出过程中,式(5)与式(6)可以写为:
d均存在且有界,也就是系统的期望运行速度与加速度均存在。FFC可以根据已经推导的系统的数学模型,预先计算一个接近理想控制信号的初始控制信号,以减小PID控制器的矫正量,提高系统的跟踪精度。FFC的结构可以根据系统的逆动力学模型进行设计。假设液压缸的运行轨迹为理想轨迹yd,回油压力pt=0。为了与工程应用近似,考虑到降低系统制造成本等因素,假设系统不存在蓄能器出口的压力传感器、液压缸有杆腔压力传感器与液压缸无杆腔压力传感器。在液压缸活塞杆伸出过程中,式(5)与式(6)可以写为:

(20)

(21)
式中, u为前馈补偿器的输出电压;ps0为蓄能器的初始充液压力(通过溢流阀设定);psdrop为供油压力的下降值,可以通过式(2)与系统的期望轨迹yd与期望速度![]() d近似估计。由式(20)与式(21)可以推得:
d近似估计。由式(20)与式(21)可以推得:

(22)

(23)
结合式(22)、式(23)、式(9)与式(13),对于液压缸活塞杆的伸出过程,FFC可以被设计为如下形式:
(24)
同样地,对于液压缸活塞杆的缩回过程,FFC的输出可以表示为:
(25)
2.3 模糊控制器(FC)
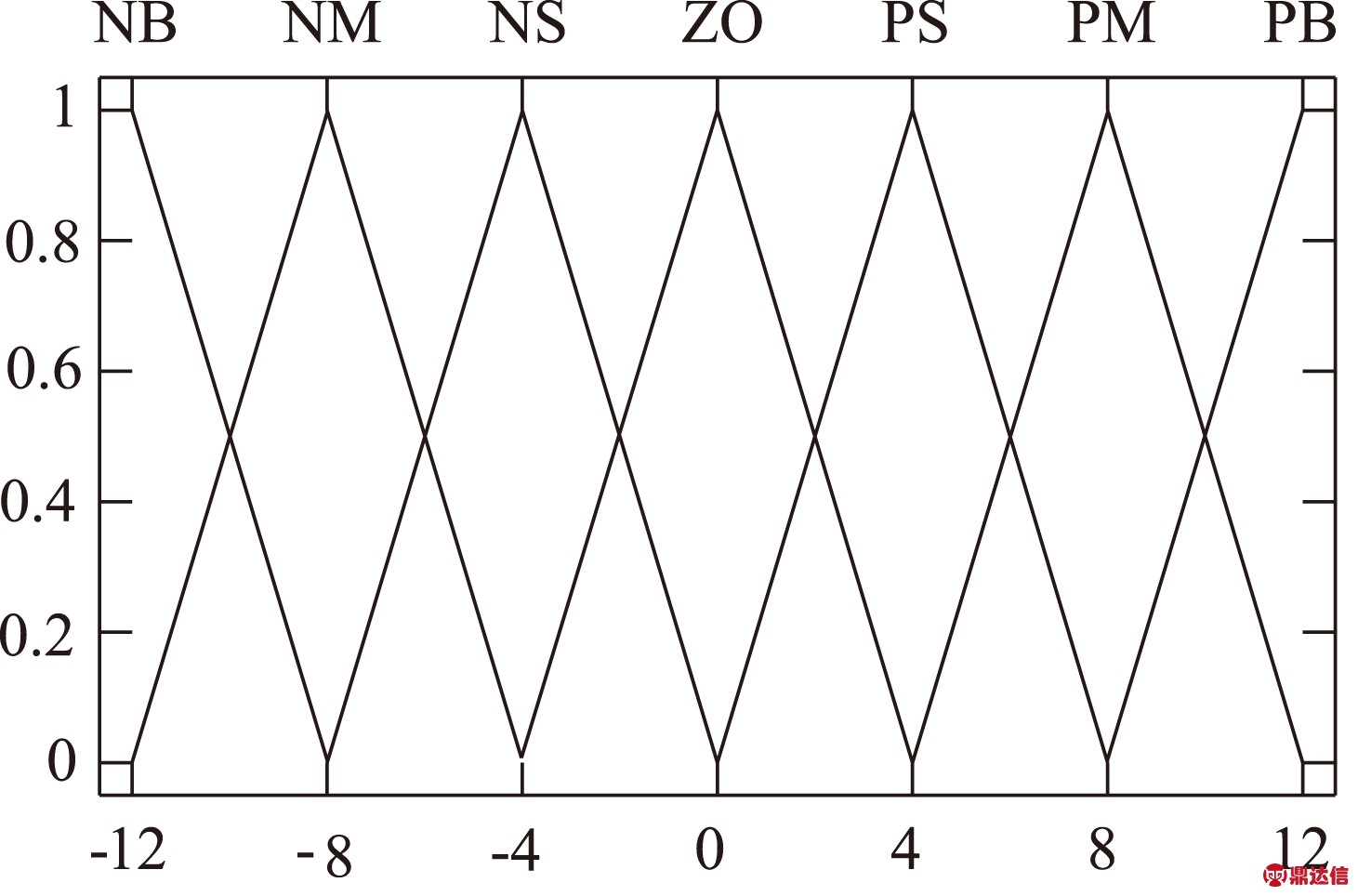
根据本研究第1.5节的论述可以知道,伺服比例阀的输出流量会受到蓄能器供给压力降低的影响,并且液压缸运行速度越快,供油压力下降越快。因此,可以设计一个模糊控制器,根据供油压力的变化规律,智能地调节PID控制器的参数,降低油源压力变化对控制系统造成的影响。在模糊控制器的设计过程中,取psdrop∈[0 MPa,4 ![]() ∈[0 mm·s-1,500 mm·s-1]为模糊控制器的输入,ΔkP∈[0,0.01],ΔkD∈[0,0.000001]为模糊控制器的输出,模糊规则表与隶属度函数分别如表4,表5与图5所示。
∈[0 mm·s-1,500 mm·s-1]为模糊控制器的输入,ΔkP∈[0,0.01],ΔkD∈[0,0.000001]为模糊控制器的输出,模糊规则表与隶属度函数分别如表4,表5与图5所示。
表4 ΔkP模糊规则表
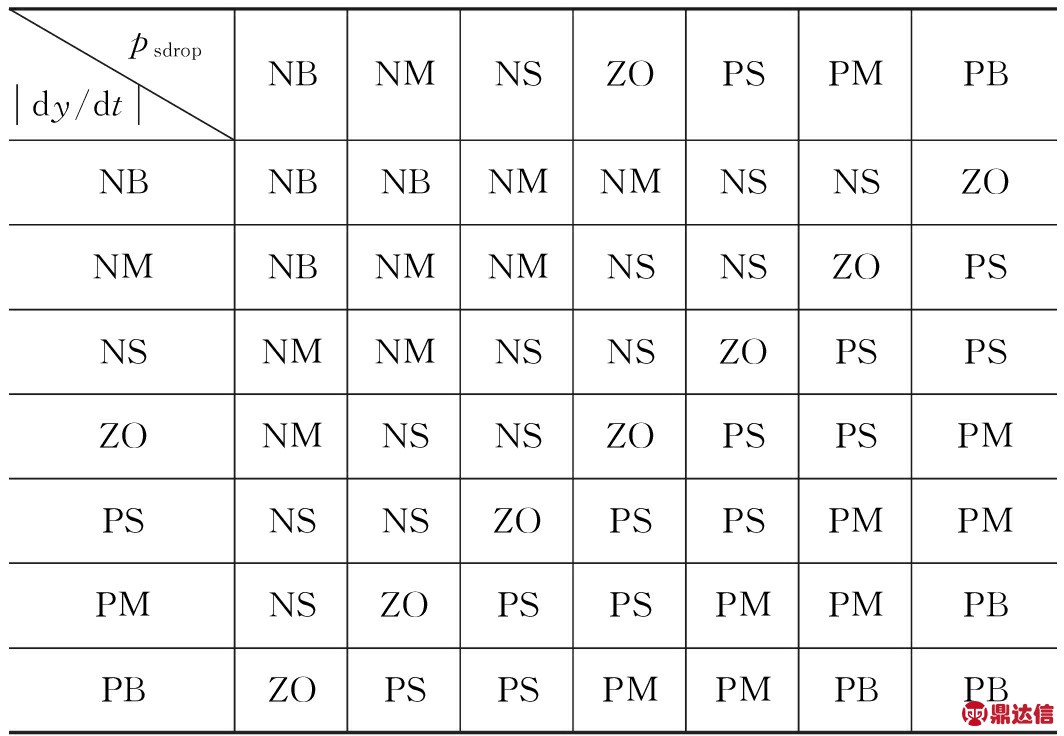
表5 ΔkD模糊规则表
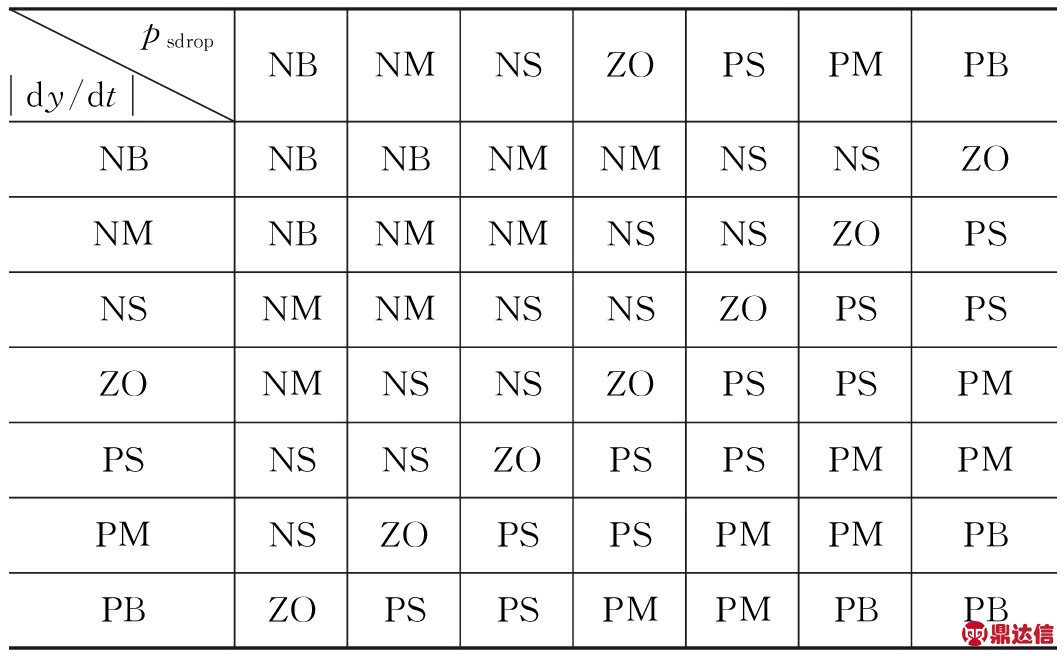
如果Δps是![]() 是PB,那么此时,供油压力已经降低很多,伺服比例阀的额定输出流量已经下降很多,且会继续快速下降,因此PID控制器的输出应该被提高,因此,模糊控制器的输出ΔkP与ΔkD应该是PB。
是PB,那么此时,供油压力已经降低很多,伺服比例阀的额定输出流量已经下降很多,且会继续快速下降,因此PID控制器的输出应该被提高,因此,模糊控制器的输出ΔkP与ΔkD应该是PB。
图5 模糊控制器隶属度函数
3 实验与分析
3.1 实验平台介绍
搭建的实验系统如图6所示,采用ADVANTECH的IPC610L工控机作为控制器,利用PIC1715U数据采集卡采集液压系统位移传感器与压力传感器的模拟量信号,利用PCI1723模拟量输出卡控制伺服比例阀的阀芯位移。
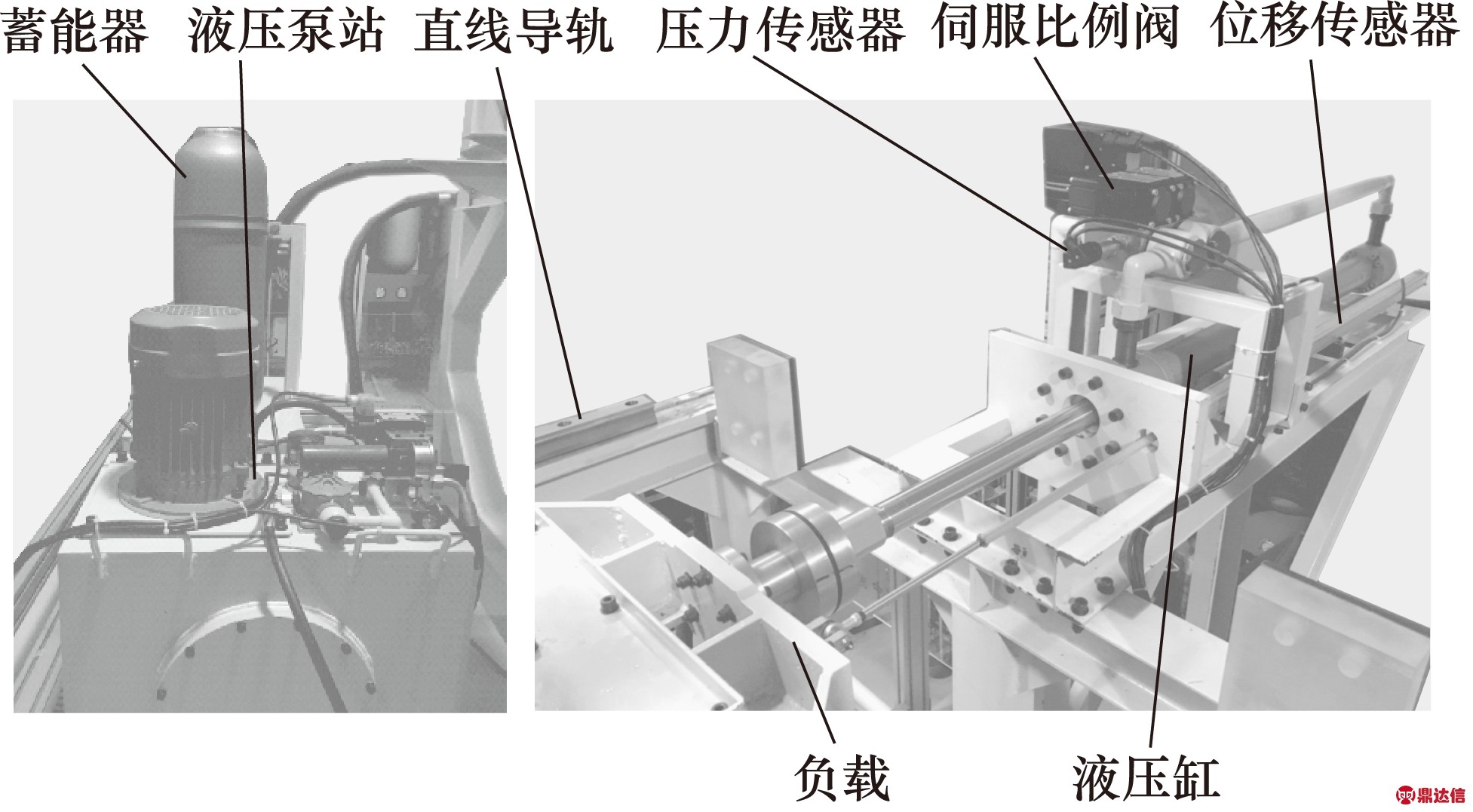
图6 实验系统实物照片
3.2 实验结果与讨论
在实验过程中,蓄能器的初始充气压力是4.2 MPa,通过小功率泵站将其充液到8.5 MPa,同时关闭液压泵站,采用蓄能器单独为液压系统提供压力油,利用伺服比例阀控制液压缸跟踪理想的位移信号。分别采用传统的PID控制器、PID控制器+前馈补偿器、PID控制器+前馈补偿器+模糊控制器三种控制方法进行对比实验。在第1组实验中,液压缸的理想轨迹和三种控制方法的实际跟踪轨迹如图7所示。PID参数被设置为kP=0.035,kI=0.0075,kD=1.2×10-6。
系统运行过程中,采用不同控制器的跟踪误差曲线如图8所示,实验过程中蓄能器供油压力如图9所示。
如图7与图8所示,当液压缸在最大行程为800 mm 的大位移跟踪过程中,采用所设计的复合控制器,在大范围内,液压缸的跟踪误差小于±1 mm;只有在液压缸换向阶段,由于采用了非对称液压缸,其无杆腔与有杆腔内的压力会产生剧烈的变化,跟踪误差会有所扩大,但是仍然小于±2 mm,控制精度达到了液压系统总行程的0.2%。单独采用PID+前馈控制器,在大范围内,液压缸的跟踪误差小于±2 mm,换向跟踪阶段误差小于±4 mm。而在液压缸运行的末段,如图9所示,由于供油压力已经从8.5 MPa下降到了5.4 MPa,因为缺少模糊控制器对PID参数的在线调整,液压缸的跟踪误差有变大的趋势。当仅采用传统的PID控制器时,液压缸的跟踪误差为±8 mm。

图7 第1组实验的理想轨迹与实际跟踪轨迹
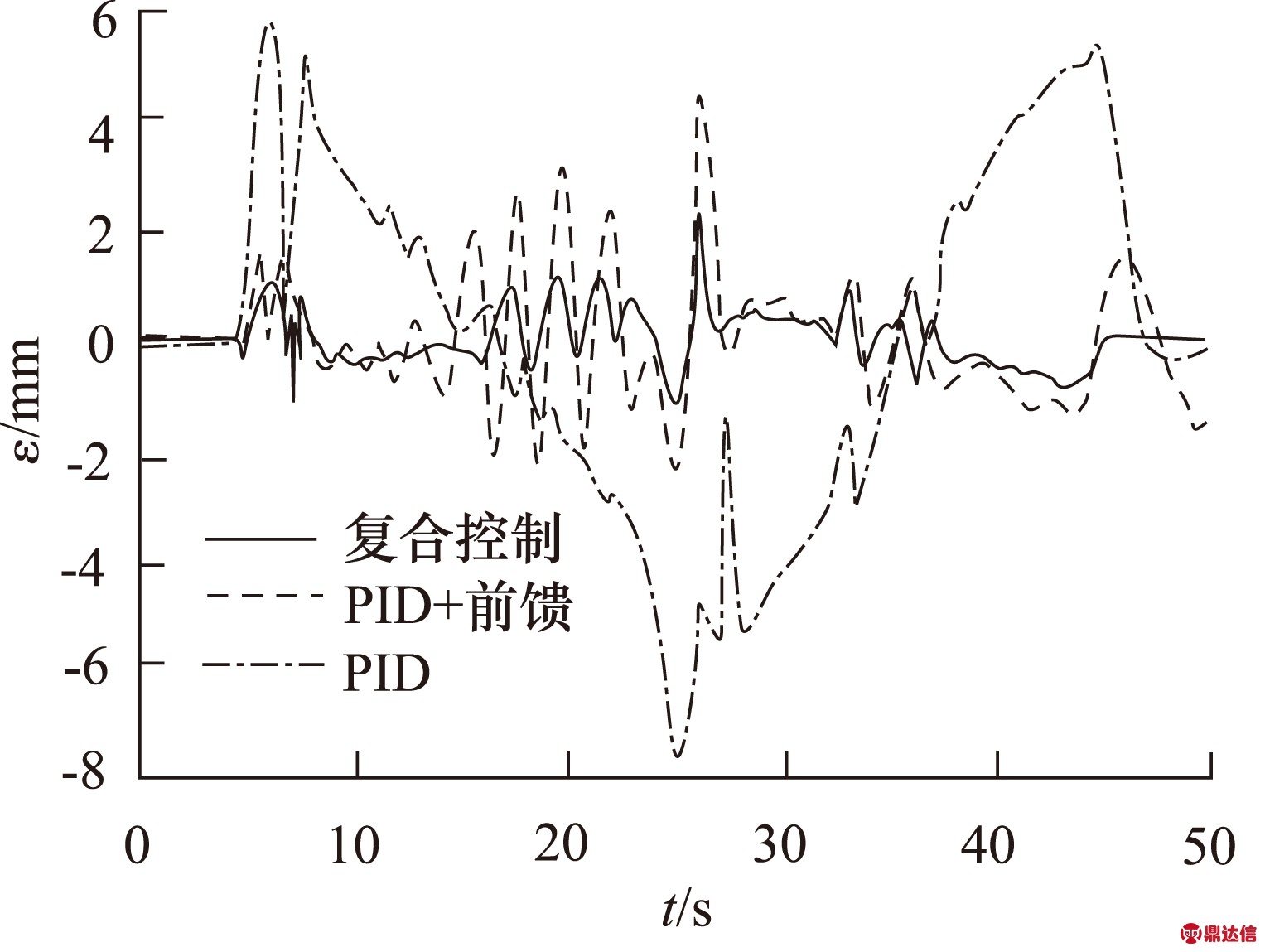
图8 第1组实验的跟踪误差曲线
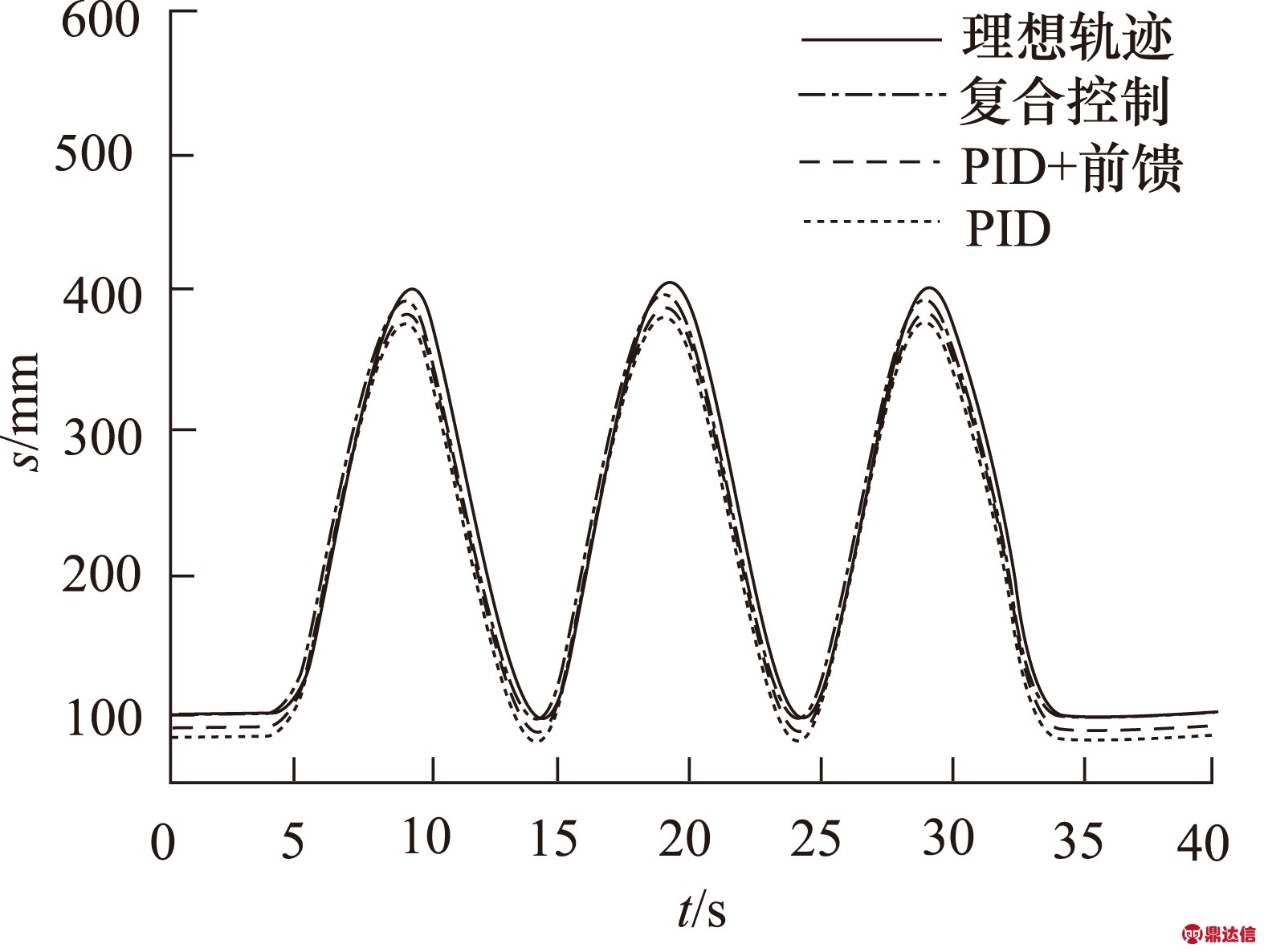
图9 第1组实验的蓄能器供油压力曲线
在第2组实验中,液压缸的理想轨迹和三种控制方法的实际跟踪轨迹如图10所示。PID参数被设置为kP=0.045,kI=0.008,kD=1.2×10-6。
图10 第2组实验的理想轨迹与实际跟踪轨迹
系统运行过程中,采用不同控制器的跟踪误差曲线如图11所示,实验过程中蓄能器供油压力如图12所示。
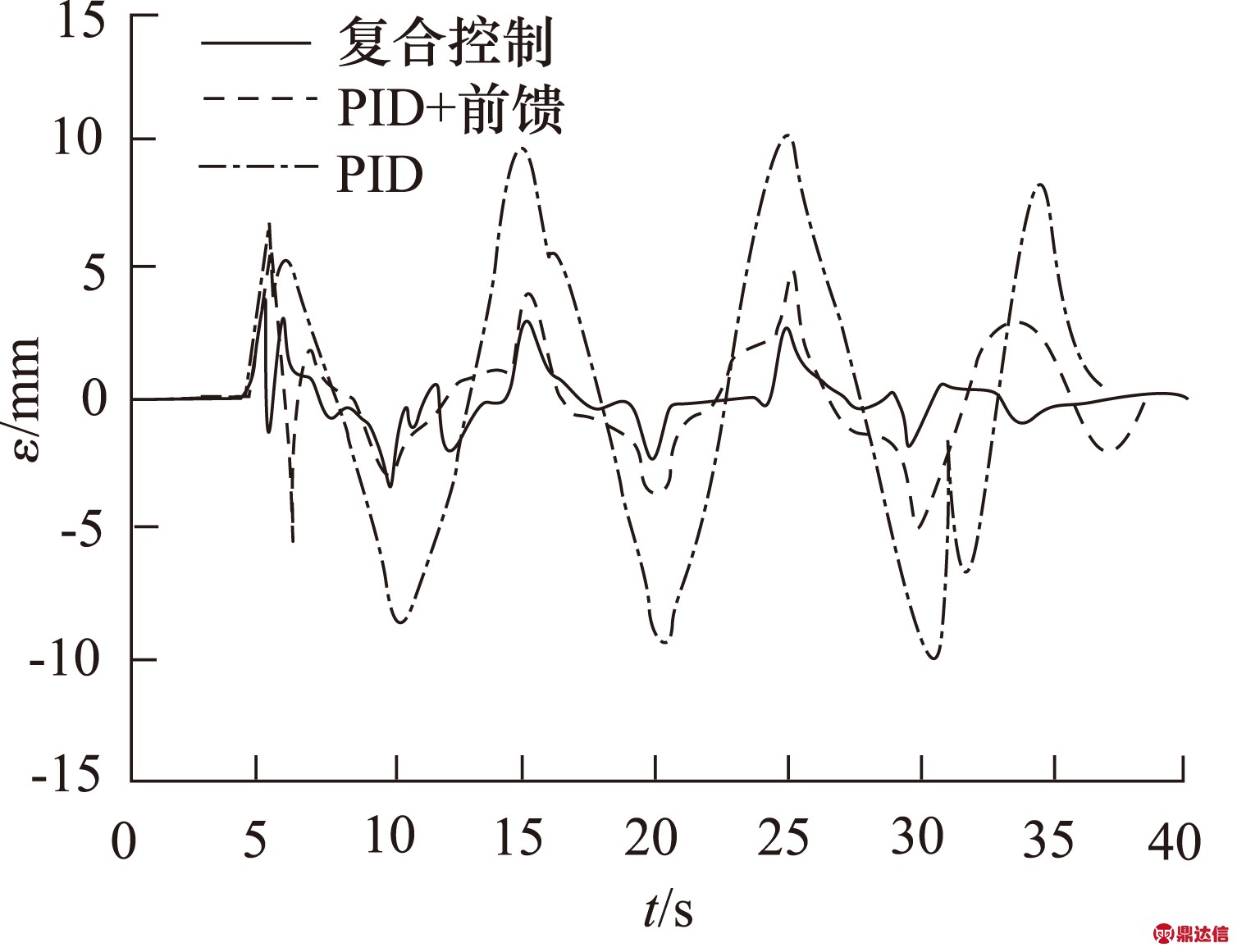
图11 第2组实验的跟踪误差曲线
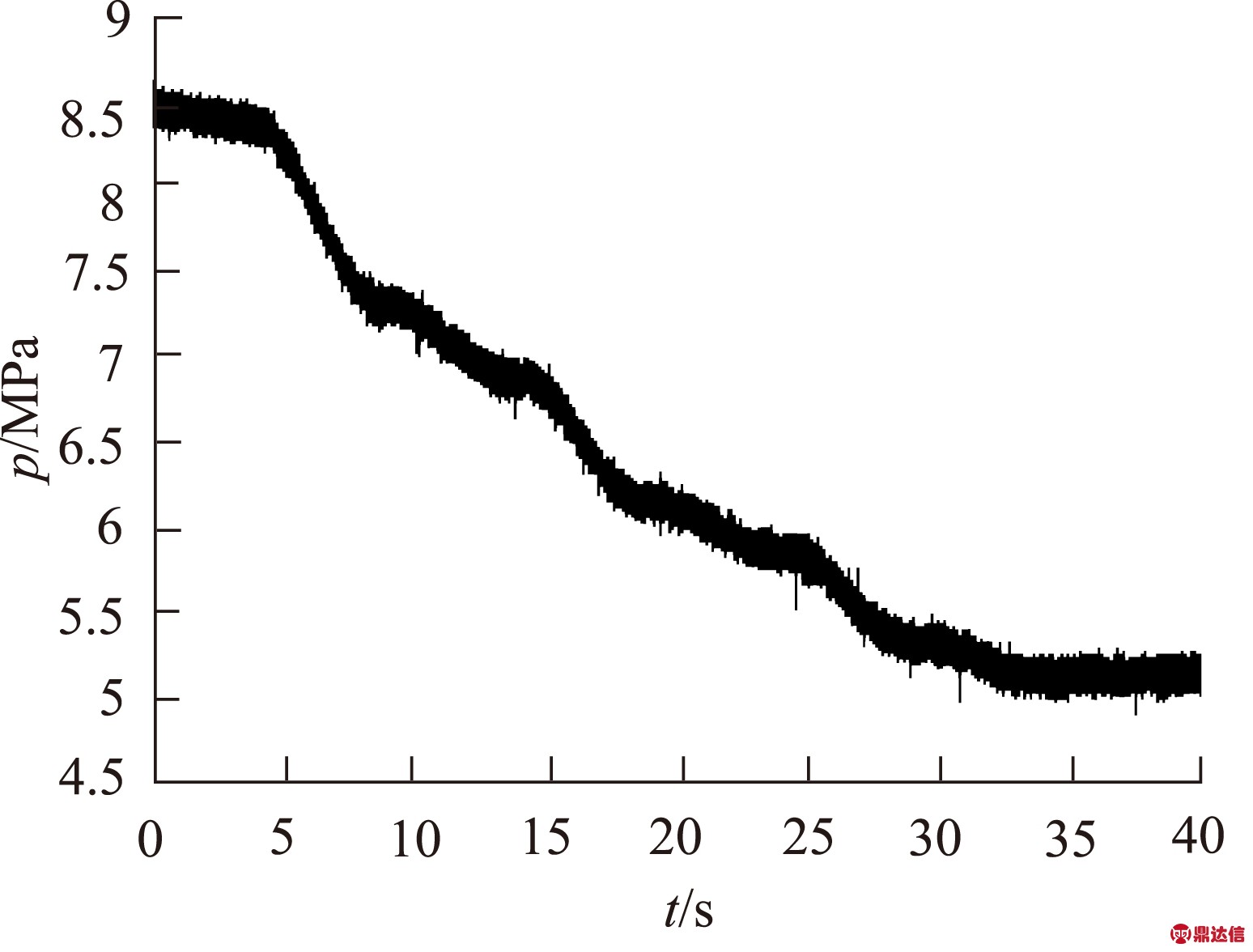
图12 第2组实验的蓄能器供油压力曲线
如图10与图11所示,当液压缸在最大行程为300 mm的多周期正弦轨迹跟踪过程中,采用本研究所设计的复合控制器,在大范围内,液压缸的跟踪误差小于±1 mm;在液压缸换向阶段,由于采用了非对称液压缸,其无杆腔与有杆腔内的压力会产生剧烈的变化,跟踪误差会有所扩大,但是仍然小于±3 mm,控制精度达到了液压系统总行程的0.3%。而单独采用PID+前馈控制器,在大范围内,液压缸的跟踪误差要小于±3 mm,换向跟踪阶段误差小于±5 mm;而在液压缸运行的末段,如图12所示,由于供油压力已经从8.5 MPa 下降到了5 MPa,因为缺少模糊控制器对PID参数的在线调整,液压缸的跟踪误差有变大的趋势。而仅采用传统的PID控制器,液压缸的跟踪误差为±10 mm,同样地,随着供油压力的降低,液压缸的跟踪精度也会有较大下降。
分析上述实验结果可以发现,前馈控制器可以有效地提高系统的动态跟踪精度,特别是当系统具有较大的速度与加速度情况时,它的效果尤为明显。在系统运行一定时间以后,随着蓄能器供油压力的下降,伺服比例阀的输出流量在给定控制信号时会显著降低,这会导致系统跟踪精度下降,而模糊控制器在这个时候可以根据系统的运行速度与供油压力的下降程度智能地调节PID参数,以提高kP与kD,从而在有效的范围内进一步提高系统的跟踪精度。
4 结论
针对以蓄能器作为变压力供油的电液位置控制系统,提出了一种新的复合补偿控制方法,以有效地提高系统的跟踪精度。考虑到系统运行过程中,蓄能器的供油压力会随着液流量的输出而逐渐降低,专门设计了一个模糊控制器实现了PID参数的在线调整。根据系统的逆动力学模型构造了一个前馈补偿器,同时在前馈补偿器的构建过程中,也充分考虑了供油压力变化对系统造成的影响。在建立系统数学模型及分析的基础上,搭建了实验平台,并将所提出的复合补偿控制方法与传统的PID控制方法,以及PID控制+前馈控制方法进行了比较实验。实验结果充分证明了所设计的复合补偿控制方法对这类利用蓄能器变压力供油的电液位置控制系统实现长行程位置跟踪的有效性。


