
摘 要: 通过仿真分析液电馈能减振器对操纵稳定性的影响,得到了液电馈能减振器在不同仿真工况下的评价指标与传统减振器基本保持一致的结果,具备实车试验可行性. 描述了液电馈能减振器工作原理,并描述其阻尼特性;选取具有代表性的工况进行仿真研究,如双移线、转向盘角阶跃和鱼钩测试等工况,将车身横摆角速度、侧倾角和侧向加速度作为评价指标,通过对比上述三个指标来评价液电馈能减振器对车辆操纵稳定性的影响;选取马达排量、单向阀开启压力和管路内径作为关键参数,分析其对操纵稳定性的影响,为液电馈能悬架的匹配提供理论基础.
关键词:液电馈能减振器;阻尼特性;整车模型;操纵稳定性
随着能源消耗日益增大,在车辆工程领域,能量回收也日益重要. 越来越多的学者开始关注车辆悬架振动能量回收,其中,Zuo等[1]分析了直线电机式以及齿轮齿条式馈能减振器性能,得出影响悬架耗散能量的三个重要因素:车辆行驶速度、路面不平度和轮胎刚度. 过学迅等[2]通过仿真和试验分析了商用车悬架馈能潜力及影响因素. 寇发荣[3]提出了一种基于电动静液压作动器的馈能悬架,并通过仿真和试验验证其馈能特性. Fang等[4]研制了一种液电式馈能减振器,在台架试验中分析了外特性以及馈能特性. Xie[5]等提出了一种基于压电材料的馈能悬架,并进行了馈能特性的影响因素分析.
车辆行驶中,在转向或制动操纵时,因惯性力影响,车辆将产生侧倾、俯仰以及横摆等姿态变化,但由其引起的悬架压缩或伸张将产生悬架作用力来阻碍车身姿态的变化,因此,悬架特性必将在一定程度上影响车辆的行驶姿态,同时也影响轮胎垂向载荷变化,而最终将改变整个操纵过程中车辆动态响应特性[6]. 国内外大部分研究集中于减振器对平顺性影响,并已验证了馈能减振器满足平顺性要求. 因此,为全面探究馈能减振器性能,本文基于已提出的一种液电馈能减振器,研究其对整车操纵稳定性的影响,以验证液电馈能悬架的实车可行性,为馈能悬架匹配以及半主动控制打下基础.
1 液电馈能减振器机理研究
1.1 液电馈能减振器工作原理
液电馈能减振器是机-电-液耦合系统,包括机械动作系统、液压整流系统和馈能系统,其中机械动作系统由液压缸、活塞杆和活塞组件组成;液压整流系统由单向阀系、蓄能器和液压油管组成;馈能系统由液压马达、发电机和负载电路组成,其工作原理如图1所示.
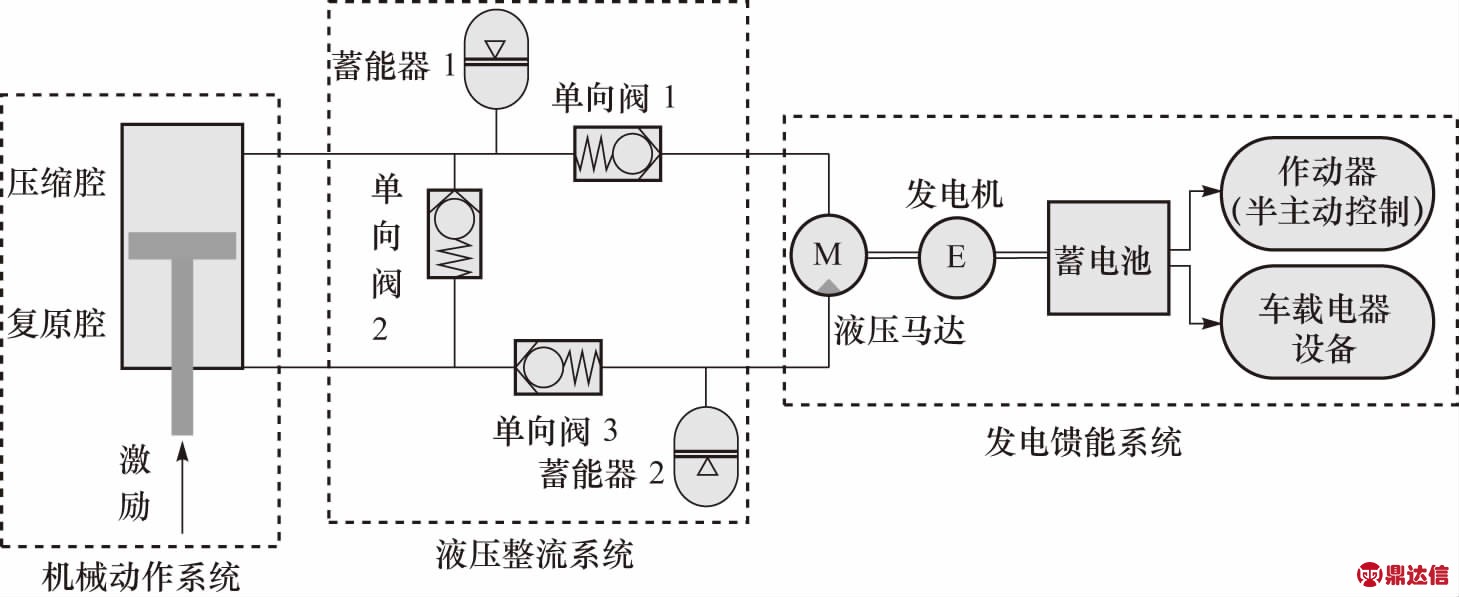
图1 液电馈能减振器工作原理
Fig.1 Principle of HESA
压缩行程:油液通过压缩腔出油口进入液压整流系统,一部分油液通过单向阀2直接流入复原腔,剩余油液通过单向阀3流向蓄能器2. 在此行程中,油液未经过发电馈能系统,不回馈能量. 复原行程:油液通过复原腔出油口进入液压整流系统,油液向单向阀3处流动,由于蓄能器2在压缩行程中已充液,故油液通过液压马达,马达旋转并带动电机发电,油液再通过单向阀1流向压缩腔,油液经过马达之后变为低压液体,蓄能器1中部分高压油液也进入压缩腔,此行程油液经过馈能系统,回馈部分能量.
1.2 液电馈能减振器阻尼特性描述
减振器阻尼特性关系到汽车平顺性和操纵稳定性等性能,是悬架匹配的重要参考因素之一. 液电馈能减振器阻尼特性在文献[4]中已详细推导过,不再详述. 液电馈能减振器的阻尼力为

(1)

(2)
式中:Fdc为压缩阻尼力;Fde为复原阻尼力;Pa1为蓄能器1压力;Pa2为蓄能器2压力;Ap为活塞截面积;Ar为活塞环截面积;Ad2为单向阀2节流孔面积;Cd为流量系数;ρV为单向阀流量;ρ为油液密度;rc为油管半径;Lc为油管长度;uv为油液运动黏度;ξ为局部阻尼系数;vjc为局部损失处油液流速;Ad1为单向阀1(或3)节流孔面积;Jm为马达电机单元转动惯量;kt为发电机力矩常数;ηm为机械效率;q为液压马达排量;I为稳压电路电流;ω为发电机转速. 当减振器处于伸张行程时,即馈能状态,阻尼力可以表示为
Fde=FΔp+Fm,
(3)
(4)
式中:FΔp为除液压马达外的液压系统阻尼力;Fm为液压马达和电机引起的阻尼力; kv为反电动势常数;Rin为发电机内阻;Re为发电电路外接负载电阻;Asl为减振器下腔环形面积;ηv为容积效率. 在液电馈能减振器选型确定后,式(3)中FΔp一定,而Fm的数值取决于其外部电路,伸张行程阻尼力主要由液压马达和电机提供,可得到如下关系式:
Fm=cevx,
(5)
(6)
式中ce为等效阻尼系数.由式(6)可以看出,等效阻尼系数ce随负载电阻Re变化,通过控制负载电阻来实现悬架的半主动控制. 在频率1.67 Hz,幅值0.05 m的正弦激励下,通过仿真获得液电馈能减振器的阻尼特性如图2所示.
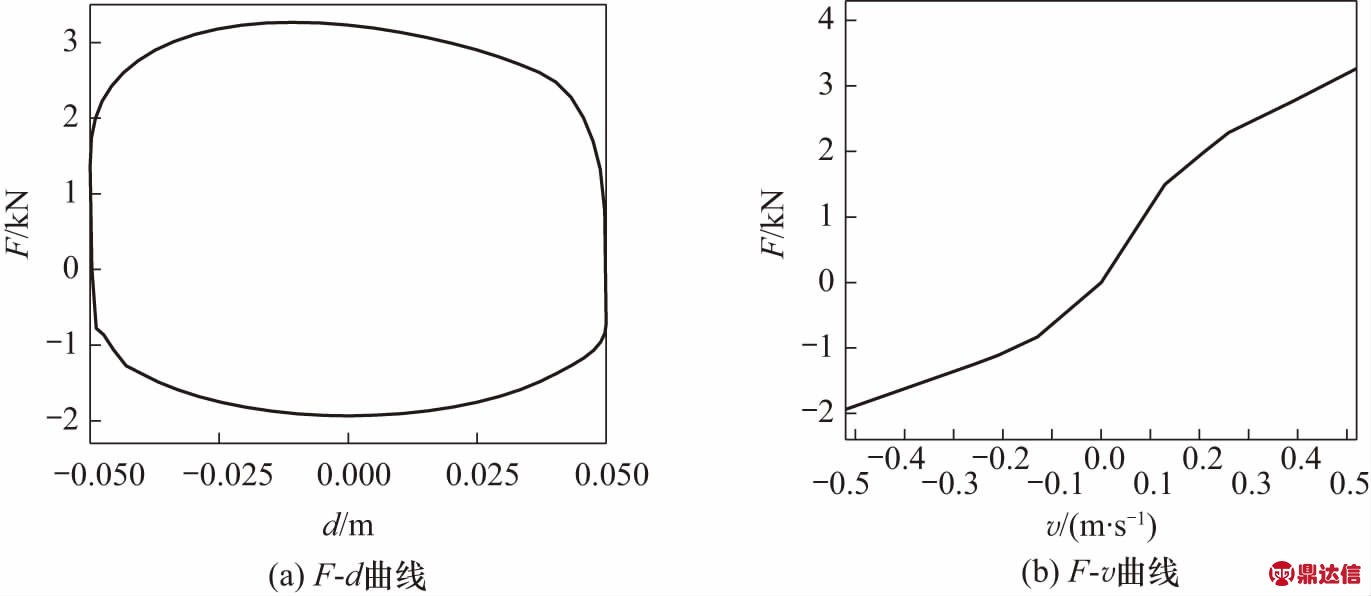
图2 液电馈能减振器阻尼特性
Fig.2 The damping characteristics of HESA
从图2(a)中的示功图中可以看出,液电馈能减振器的阻尼力符合上述标准中额定复原阻尼力和压缩阻尼力的要求.
2 仿真模型
基于某型乘用车,以液电馈能减振器和传统减振器为研究对象,通过仿真试验评价液电馈能减振器实车可行性,整车相关结构尺寸参数如表1所示,仿真框图分别如图3所示.
表1 整车结构尺寸参数
Tab.1 Size parameters of vehicle
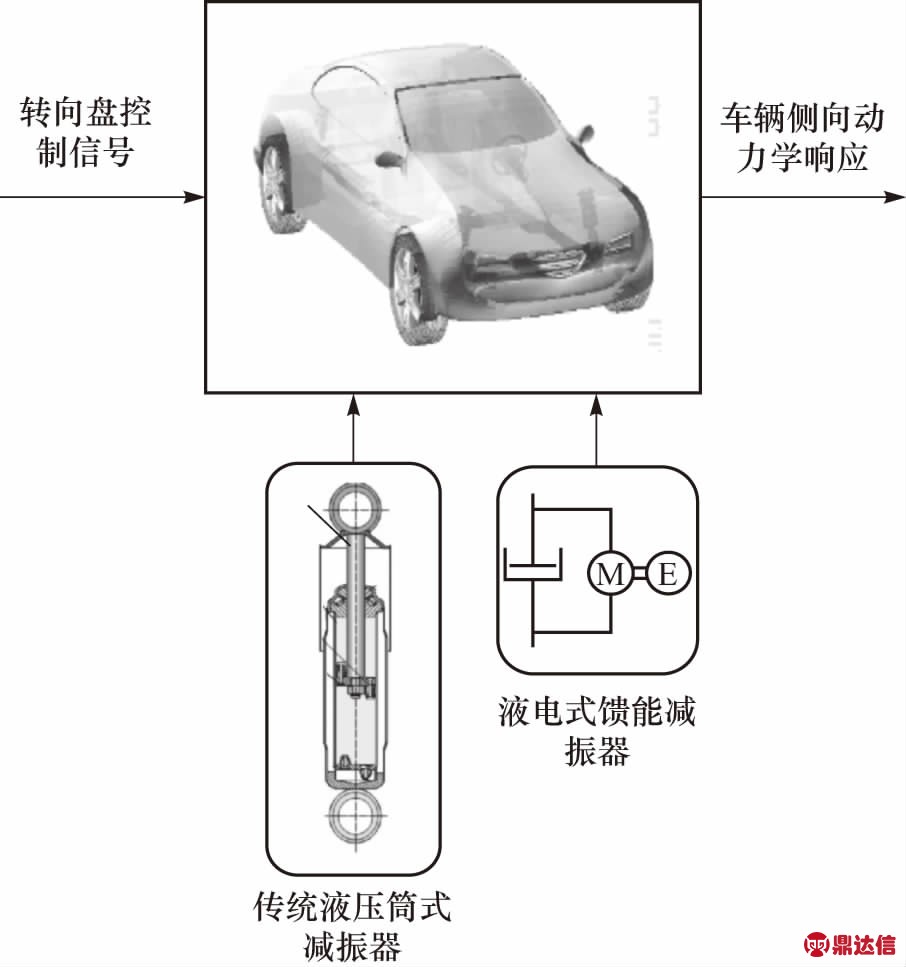
图3 整车仿真流程框图
Fig.3 Diagram of simulation process
如图4所示,馈能减振器模型由液压缸、整流桥和稳压电路组成. 其中,整流桥包含若干单向阀和蓄能器,同时为细化模型,在回路中添加拐角和弯道模拟局部损失区;发电机模型为理想模型,忽略温度、转速等因素对能量回收效率的影响;为减少因振动引起的波动,设置一套稳压电路,通过调节负载电路中稳压电流来改变系统阻尼特性和可回收的能量.
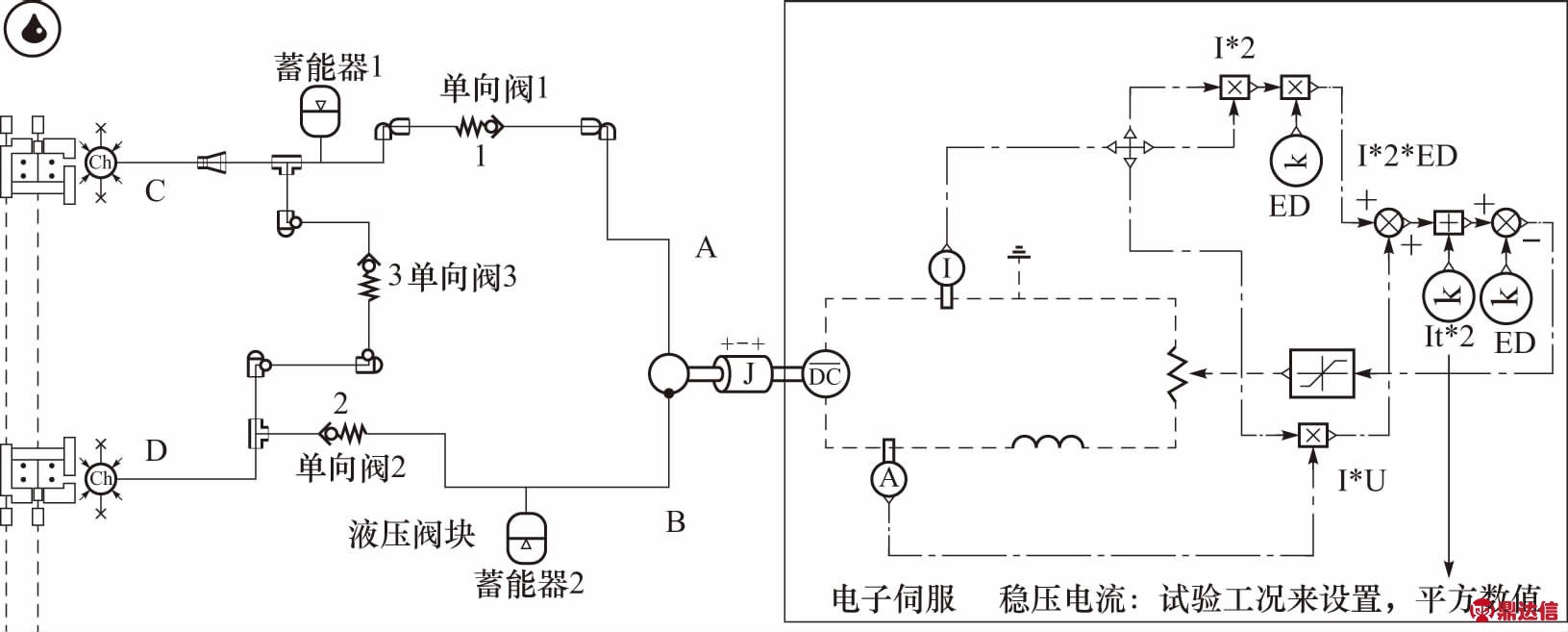
图4 馈能减振器仿真模型
Fig.4 Simulation model of HESA
3 整车仿真试验分析
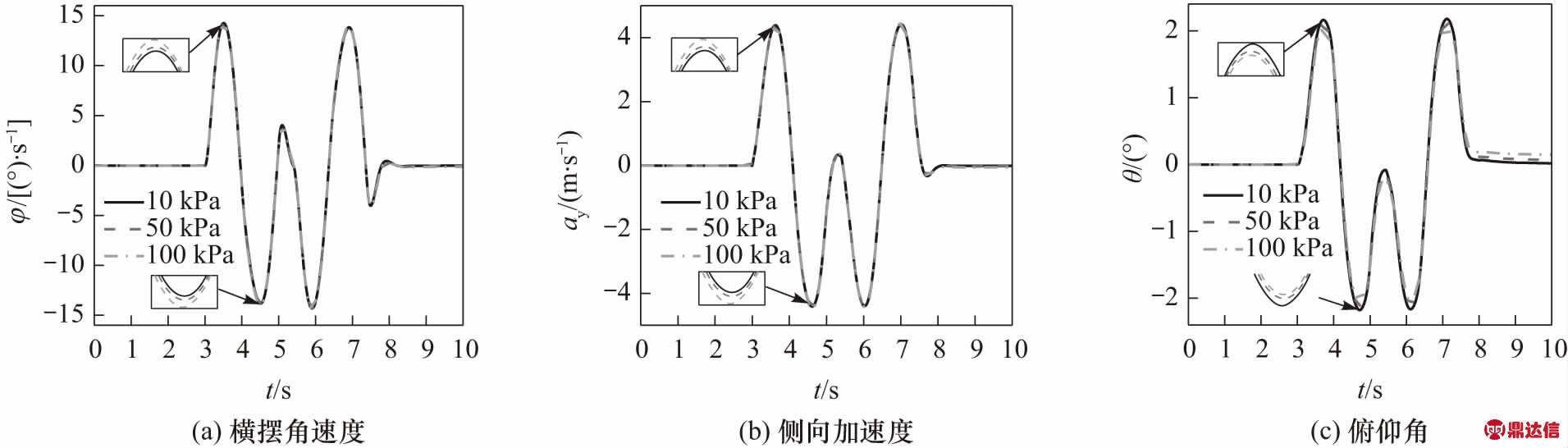
选择反映悬架系统抗侧倾的双移线工况,考察车辆侧倾动态响应;选择转向盘角阶跃工况,考察车辆转向动态响应;选择鱼钩试验,考察极限工况下的动态响应,仿真车速80 km/h. 图中,φ为横摆角速度,ay为侧向加速度,θ为俯仰角.
图5~7均表明两种减振器各指标变化趋势基本一致. 其中,在双移线工况下,HESA对应峰值较传统液压减振器减少13.50%~14.75%;在转向盘角阶跃工况下,HESA的横摆角速度峰值和侧向加速度峰值均比传统减振器稍大,侧倾角峰值较传统液压减振器减少12.11%;在鱼钩工况下,HESA的侧倾角峰值较传统液压减振器减少13.75%,侧向加速度峰值较传统液压减振器高12.90%.
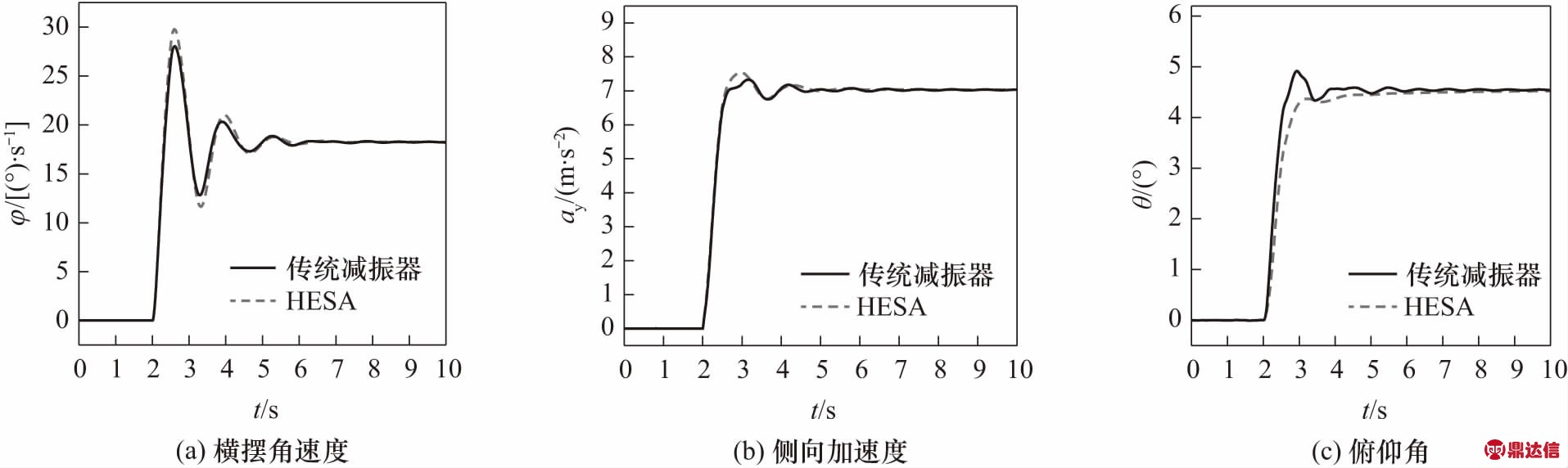
图5 双移线工况
Fig.5 Mode of double lane change
图6 转向盘角阶跃工况
Fig.6 Mode of steering wheel angle step
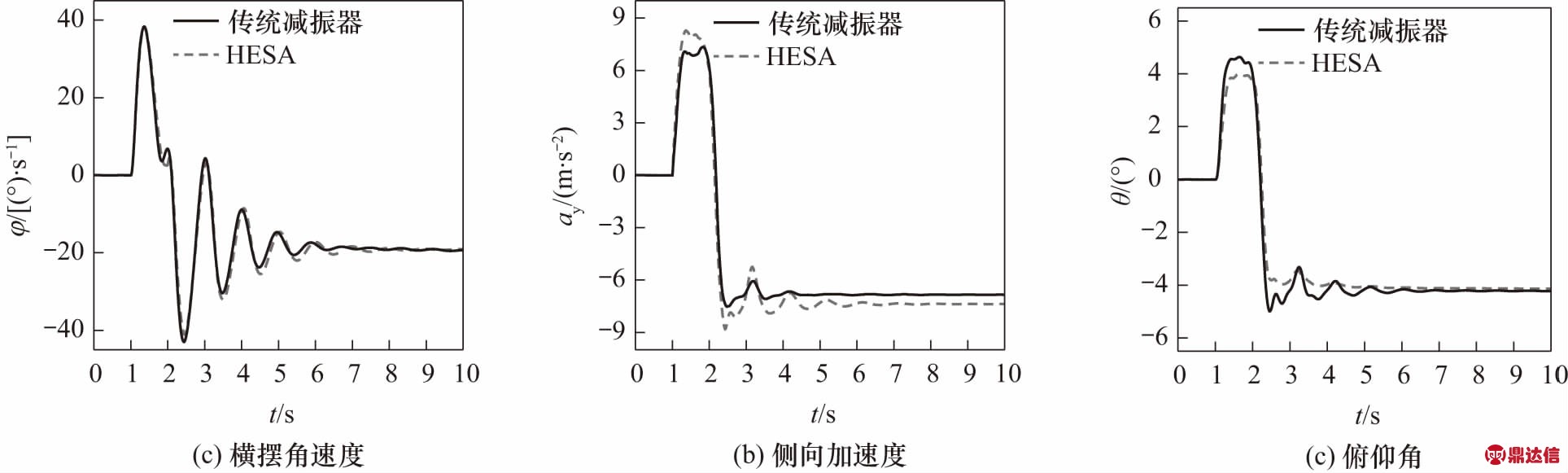
图7 Fishhook工况
Fig.7 Mode of Fishhook
4 液电馈能减振器参数对整车操纵稳定性的影响研究
为全面研究液电馈能减振器对整车操纵稳定性的影响,由上述分析可知对操纵稳定性有影响的关键参数为:马达排量、单向阀开启压力和管路内径. 双移线为车辆行驶过程中的常遇工况,故以双移线仿真试验为例进行评价分析.
图8表明车身侧倾角峰值与液压马达排量成正比,其增幅为0.33%,车身横摆角速度和侧向加速度峰值均与液压马达排量成反比,其减小幅度分别为0.25%和0.14%;图9表明车身侧倾角峰值与单向阀开启压力成反比,其减小幅度为0.42%,车身横摆角速度和侧向加速度峰值均与单向阀开启压力成正比,其增幅分别为0.26%和0.15%;图10表明车身侧倾角峰值与管路内径成正比,其增幅为0.18%,车身横摆角速度和侧向加速度峰值均与管路内径成反比,其减小幅度分别为0.12%和0.14%.
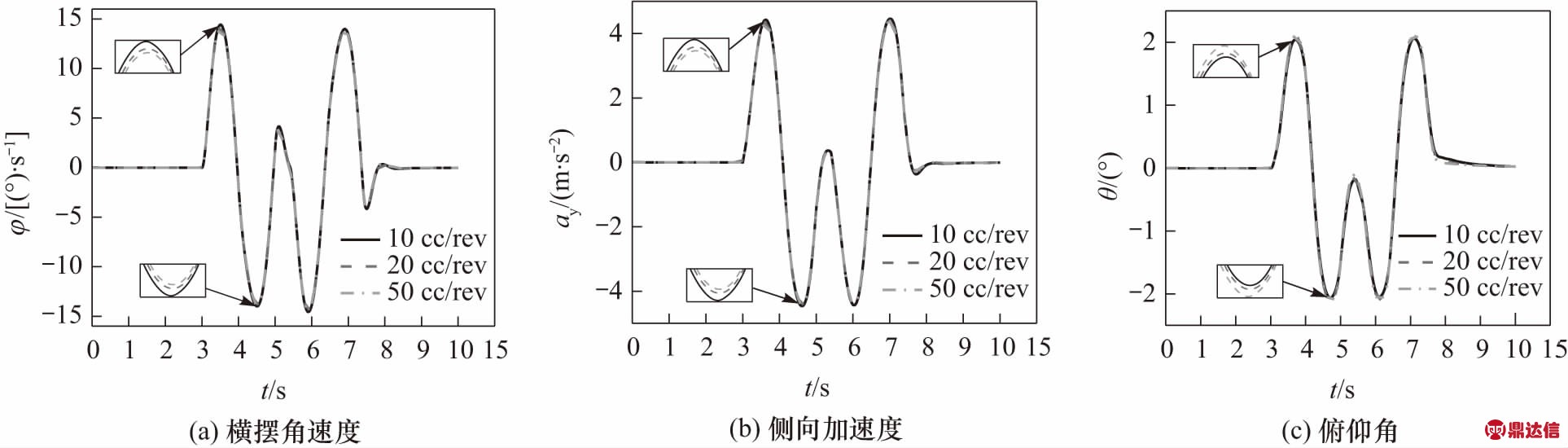
图8 液压马达排量的影响
Fig.8 Influence of hydraulic motor displacement
图9 单向阀开启压力的影响
Fig.9 Influence of check valve cracking pressure
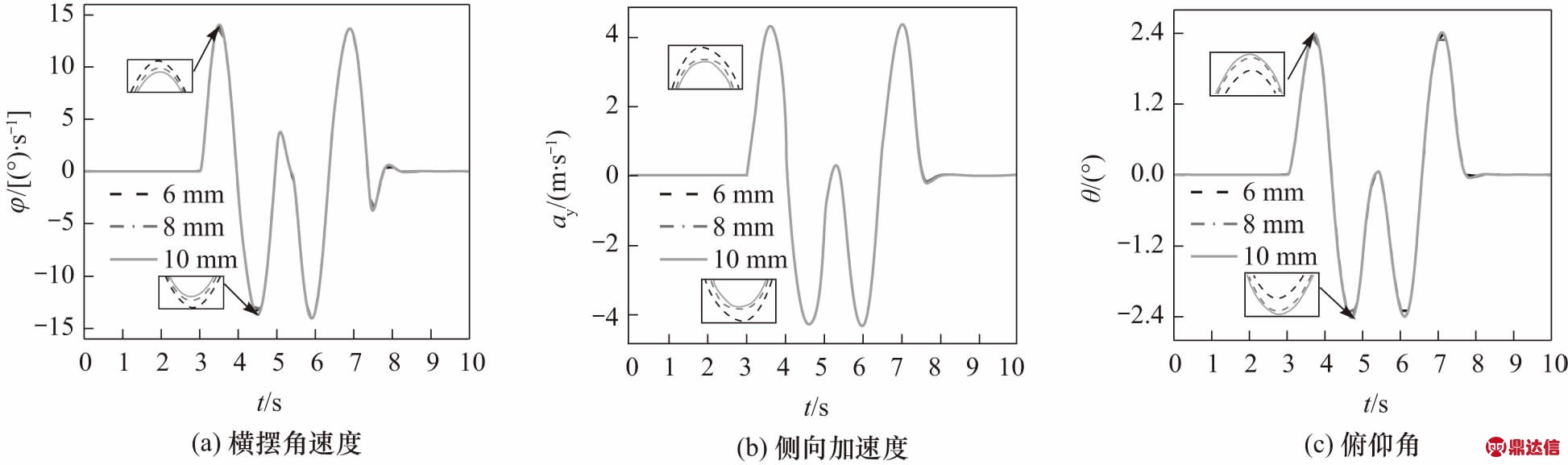
图10 管路内径的影响
Fig.10 Influence of pipe inner diameter
5 结 论
基于已提出的液电馈能减振器,通过仿真试验对比分析其对操纵稳定的影响,结果表明:液电馈能减振器和传统减振器对操纵稳定性的影响基本一致,其中,在双移线和转向盘角阶跃两种稳态仿真工况中,液电馈能减振器和传统减振器差别很小,各项指标的峰值、稳态数值和达到稳态的时间基本相同,且曲线变化平顺;在鱼钩测试极限仿真工况中,综合3个指标来看,液电馈能减振器比传统减振器表现好,其侧倾角峰值较低,稳态横摆角速度值和侧向加速度值较低,只有侧向加速度峰值偏大.
液电馈能减振器参数的变化引起减振器阻尼特性的改变,进而影响整车操纵稳定性,通过仿真分析可以看出馈能减振器参数变化对整车操纵稳定性的影响较小,并得到了如下规律:增大液压马达排量,侧倾角动态峰值增大,横摆角速度和侧向加速度动态峰值均减小;增大单向阀开启压力,侧倾角动态峰值减小,横摆角速度和侧向加速度动态峰值均增大;增大管路内径,侧倾角动态峰值增大,横摆角速度和侧向加速度动态峰值均减小.
上述研究结果可以作为液电馈能减振器实车试验依据,在此基础上可以进行半主动控制悬架研究,优化液电馈能减振器的阻尼特性,改善其对整车操纵稳定性的影响.


