
摘 要:确保纯电动行驶中快速、平稳地启动发动机,是P2构型混合动力系统的技术难点之一。行星轮耦合式混合动力系统应用锁止离合器的分离或接合,以实现行星轮装置的差速运动或同速运动,可实现混合动力不同模式间的切换。通过行星轮锁止离合器的动力学分析,以启动冲击最小化为目标,推导了纯电动行驶中启动发动机时锁止离合器的力矩计算公式。
关键词:行星轮; 冲击; 耦合装置; 锁止离合器
从1997年第一代丰田Prius上市销售以来,丰田汽车公司搭载THS混合动力系统的车型销售量逐年攀升。THS技术的核心零部件为双电机、发动机及行星轮装置,可使汽油机和电力两种动力系统通过串联、并联相结合的形式进行工作,以实现低排放的目标 [1] 。
P2构型混合动力系统,常见的有离合器耦合式和行星轮耦合式。离合器耦合式混合动力系统利用离合器的分离或接合,实现发动机和电机的动力耦合。行星轮耦合式混合动力系统应用锁止离合器的分离或接合,可实现行星轮装置的差速运动或同速运动,使混合动力在不同模式间切换。P2构型混合动力系统的技术难点是,如何实现纯电动行驶中快速、平稳地启动发动机。张俊智等人对离合器耦合式的混合动力车辆纯电动行驶中启动发动机的冲击度及离合器动力学计算进行了研究,未针对行星轮耦合式混合动力系统的锁止离合器进行分析,缺乏针对性[2]。刘振军等人对离合器耦合式混合动力系统纯电动行驶中启动发动机的冲击度进行了研究,但未对行星轮耦合式锁止离合器动力学进行分析[3]。
1 锁止离合器动力学分析
本次研究中的混合动力系统采用P2构型的单排行星轮耦合形式,系统主要由电机、发动机、锁止离合器、太阳轮、行星齿轮、行星架及齿圈等构成(见图1)。发动机与太阳轮相连并互传动力,电机与齿圈相连并互传动力,行星架作为动力输出端与变速器输入轴相连并互传动力。锁止离合器设置在齿圈和行星架之间,通过控制该离合器的分离或接合,实现混合动力不同模式间的切换。

1—发动机;2—电机;3—变速器;4—行星架;5—锁止离合器;6—齿圈;7—太阳轮。
图1 混合动力系统示意图
混合动力系统不同工作模式下的各部件工作状态见表1。通常,行星轮系统3个轴的速度具有下列关系:
ωS·rS+ωR·rR=ωC·(rS+rR)
(1)
式中:ωS表示太阳齿轮轴的转速;ωR表示齿圈轴的转速;ωC表示行星架轴的转速;rS表示太阳齿轮S的半径;rR表示齿圈R的半径。
表1 混合动力系统不同工作模式下各部件工作状态
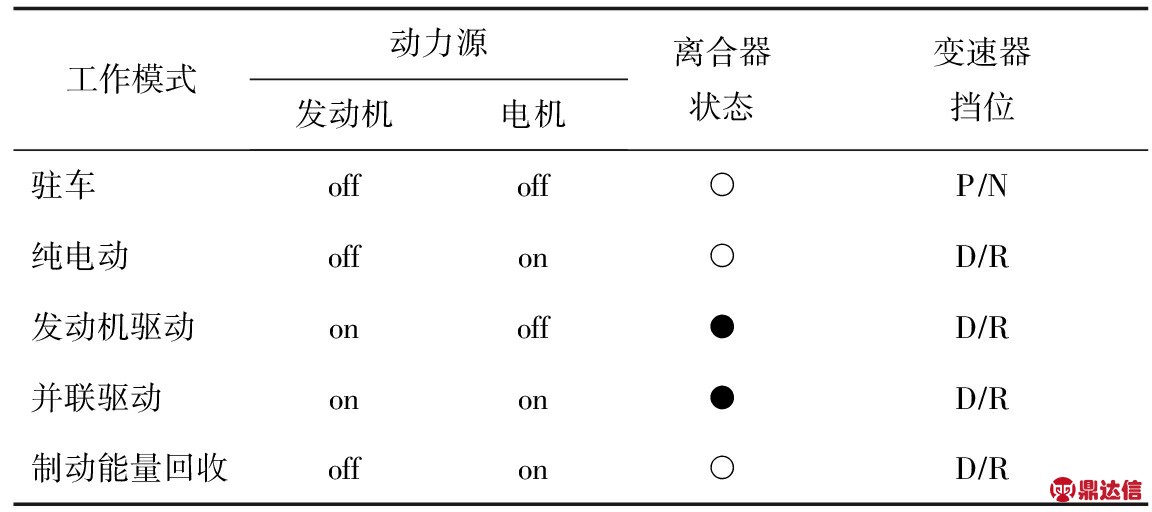
注:○表示分离;●表示接合。
当其中任意2轴的速度已知,则第3轴的转速是确定的,可根据式(1)计算得出。式(1)可以用直观的杠杆图来表示(见图2),3条水平线段的长度分别代表太阳齿轮轴转速ωS、齿圈轴转速ωR和行星架轴转速ωC,箭头则分别指出了3个轴转动的正方向。

图2 太阳轮、齿圈、行星架转速杠杆图
行星轮系统3个轴的力矩存在下列关系:
TC=TS+TR
(2)
![]() =
=![]()
(3)
式中:TS表示太阳轮的扭矩;TR表示齿圈的扭矩;TC表示行星架扭矩;ZR表示齿圈的齿数;ZS表示太阳轮的齿数。
当其中某一个轴的扭矩已知,则另外2轴的扭矩是确定的,可以通过式(2)、(3)计算得出。式(2)、(3)也可以用直观的杠杆图来表示(见图3),3条水平线段的长度分别代表电机作用在齿圈轴上的扭矩TM、发动机作用在太阳轮轴S上的扭矩TS和行星架轴输出的扭矩TC,其箭头则分别指出了3个轴正向扭矩的方向。
在纯电驱动下需要启动发动机时,必须通过接合锁止离合器来使行星轮系锁定,并由太阳轮轴拖动发动机轴转动。在离合器耦合之前,发动机处于静止状态,其轴转速为零,而电机和变速箱输入轴(连行星架)高速转动。这3个轴各自具有转动惯量,转速不同。若此时将3个轴锁在一起,行星齿轮系的3个轴就要进行一个完全非弹性的转动碰撞。这个转动碰撞会在行星架上产生冲击负扭矩,而负扭矩传递到车轮上时会使车辆产生振动,并使乘车者感到难受,更甚者可能导致机械结构的损坏而发生安全事故。
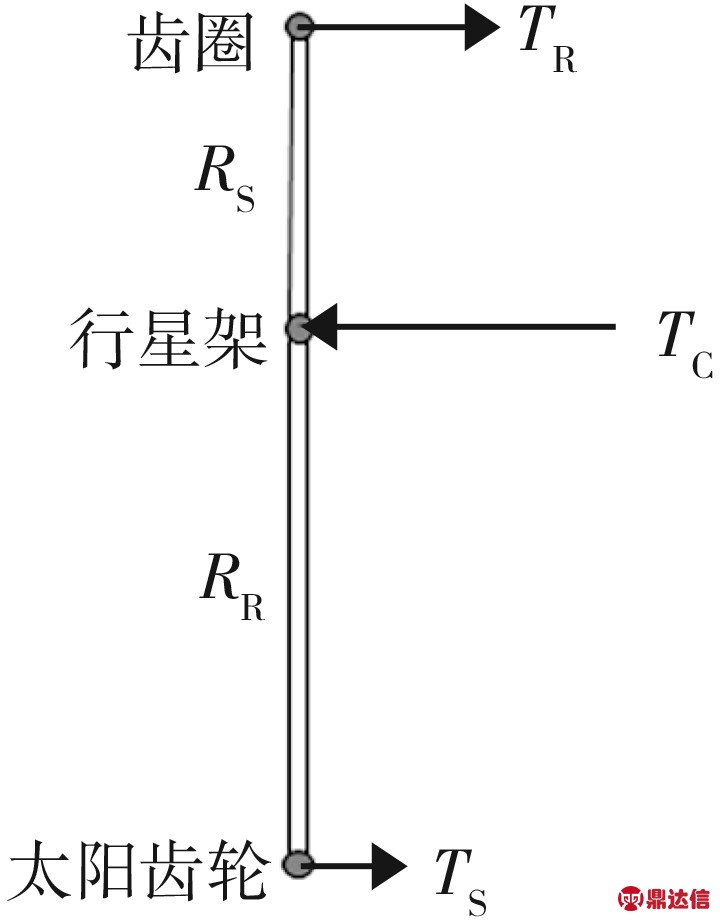
图3 太阳轮、齿圈、行星架3轴的力矩图
分析锁止离合器耦合时行星齿轮机构3个齿轮的受力和转动的加速度情况(见图4)。图中![]() 表示齿圈轴R的角加速度;
表示齿圈轴R的角加速度;![]() 表示行星架轴C的角加速度;
表示行星架轴C的角加速度;![]() 表示太阳轮轴S的角加速度。
表示太阳轮轴S的角加速度。
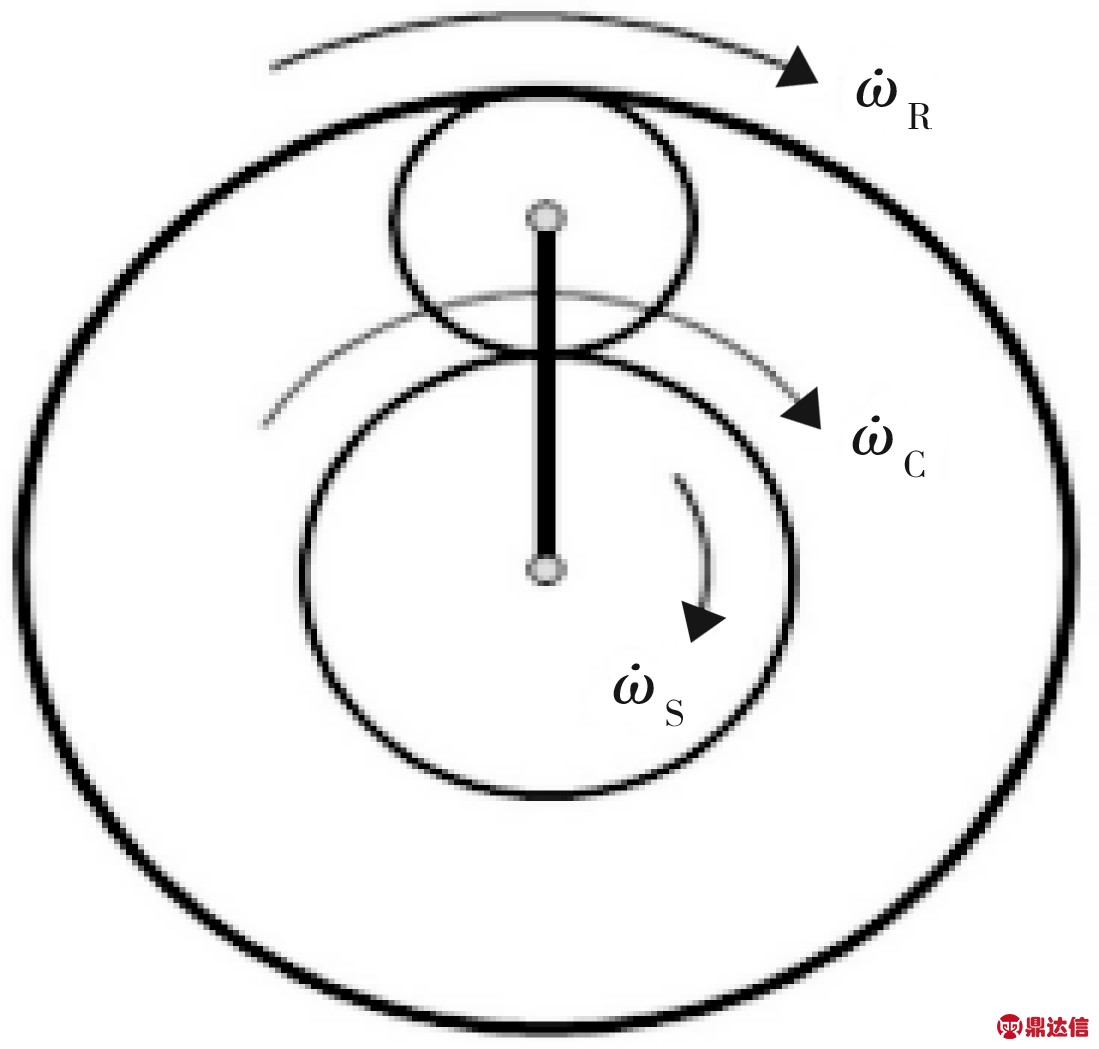
图4 离合器耦合时行星齿轮受力及角加速度示意图
分析齿圈R的受力和角加速度(见图5)。图中:FR表示小行星轮P对齿圈R的作用力;![]() 表示齿圈R的角加速度;JR表示齿圈R上的总惯性矩为;TCL表示限力矩离合器的耦合力矩。其动力学方程为:
表示齿圈R的角加速度;JR表示齿圈R上的总惯性矩为;TCL表示限力矩离合器的耦合力矩。其动力学方程为:

(4)

图5 离合器耦合时齿圈受力及角加速度示意图
分析行星齿轮C受力情况(见图6)。小行星齿轮P的质量和惯性矩较小,故忽略不计。图中,FS表示太阳齿轮S对行星齿轮P的作用力;FR表示齿圈R对行星齿轮P的作用力;FC表示行星架对小行星齿轮的作用力;r表示小行星齿轮的半径。其动力学方程为:
FR·r′=FS·r′
(5)

图6 离合器耦合时小行星齿轮受力及角加速度示意图
FC=FS+FR
(6)
由式(5)得:
F=FS=FR
(7)
由式(6)、(7)可得出
FC=2FS=2FR
(8)
(9)

图7 离合器耦合时行星架受力及角加速度示意图
分析行星架轴C受力情况(见图7),TFV为整车阻力矩对行星架作用力矩。由由式(8)、(9)得:

(10)
分析太阳齿轮的受力和角加速度情况(见图8)。图中![]() 表示太阳齿轮的角加速度;JS表示太阳齿轮S上的惯性扭矩;FS表示小行星齿轮P对太阳轮的作用力。
表示太阳齿轮的角加速度;JS表示太阳齿轮S上的惯性扭矩;FS表示小行星齿轮P对太阳轮的作用力。

(11)

图8 离合器耦合时太阳轮受力及角加速度示意图
行星轮系统3个齿轮的速度关系为:
ωS·rS+ωR·rR=ωC·(rS+rR)
对上述速度方程求导,可得3轴的加速度方程:

(12)
根据上述行星齿轮机构3个齿轮的受力分析和3个齿轮轴加速度方程的推导,可得到如下4个方程:

由式(11)得:
FS=-![]()
(13)
由式(10)得:

(14)
由方程(13)、(14)得:
TCL=![]()

(15)
式(15)中:JS表示发动机的转动惯量;rR和rS表示行星齿轮机构参数,当本机构设计好之后,他们都是已知参数;JC和TFV表示整车等效转动惯量和整车阻力折算到行星架轴上的转动惯量和力矩,可以通过整车当前速比、车速、车轮半径及车重计算得出;![]() 表示发动机的角加速度;
表示发动机的角加速度;![]() 表示变速箱输入轴的角加速度。
表示变速箱输入轴的角加速度。
由式(4)得:
(16)
由式(13)、(16)得

(17)
式(17)中:TFE表示发动机参数;JR表示电机参数,当本机构设计好之后,他们都是已知参数;![]() 表示齿圈的角加速度,可以根据
表示齿圈的角加速度,可以根据![]() 和
和![]() 的值及式(1)求得。根据式(15)计算的离合器的耦合力矩TCL值,即可计算出启动发动机过程中驱动电机的驱动力矩TM值。
的值及式(1)求得。根据式(15)计算的离合器的耦合力矩TCL值,即可计算出启动发动机过程中驱动电机的驱动力矩TM值。
2 应用举例
假设整车以50 km h匀速电动行驶,启动发动机过程中
h匀速电动行驶,启动发动机过程中![]()
(1) 整车和系统参数:JS=0.131 3 kg·m2,rR=0.071 55 m,rS=0.039 7 m,JR=0.036 7 kg·m2,TFE=20 N·m;车重1 690 kg,车轮半径0.307 m。
(2) 车辆以EV模式行驶,车速50 kmhm, 速比5.141,将整车惯性力折算到变速箱输入轴,得:JC=6.06 kg·m2。将整车阻力折算到变速箱输入轴,得:TFV=8.01 N·m。
(3) 根据发动机启动时间要求进行设定![]() 要求发动机在0.3 s内由0 rmin加速至800 rmin,即
要求发动机在0.3 s内由0 rmin加速至800 rmin,即![]() 60)0.3≈280 rads2。
60)0.3≈280 rads2。
![]() 为行星架的加速度,根据启动发动机过程中
为行星架的加速度,根据启动发动机过程中![]() 的要求,取
的要求,取![]() s2。
s2。
(5) 根据公式(1),可得:
![]()
![]()
![]() rR
rR
=0×(0.071 55+0.039 7)0.071 55-
280×0.039 70.071 55
=-155.36 (rads2)
(6)根据式(15)计算得到
TCL![]()
=6.06×0+8.01+(0.071 55+0.039 7)×
(20+0.131 3×280)0.039 7
=167(N·m)
(7)根据公式 (17),计算得到
TM![]()
=167+0.036 7×(-155.36)-0.071 55×
(20+0.131 3×280)0.039 7
=59(N·m)
3 结 语
本次研究中,通过对行星轮耦合式混合动力系统纯电动行驶中启动发动机时锁止离合器的动力学分析,结合行星轮的杠杆分析图,推导出行星轮锁止离合器的力矩计算公式。将力矩公式用于实例计算,验证了其可靠性。


