
摘 要: 针对极化空时自适应处理时目标极化状态和杂波协方差矩阵未知等实际瓶颈问题,提出了一种适应于机载极化阵列雷达的极化空时自适应匹配滤波(PST-AMF)检测算法.该检测算法先利用回波数据估计目标的极化状态,然后再将估值代入似然比得到了新的检验统计量,进一步推导了检测器虚警概率和检测概率的解析表达式,从理论上证明了该检测方法具备恒虚警(CFAR)特性.该检测器计算量比极化空时广义似然比检测器(PST-GLRT)少,易于工程实现.最后,仿真验证了在检测慢速运动目标时,其性能优于单个通道的空时自适应匹配滤波检测器(ST-AMF),具备较强的稳健性.
关键词: 极化阵列;空时自适应处理;极化空时自适应处理;滤波;检测
1 引言
空时自适应处理(STAP)是机载雷达一种有效地利用目标与杂波在空域和Doppler域的差异将杂波抑制,增强信号,提高检测性能的方法[1~5].然而,目标慢速运动或切向运动时,目标与杂波在空域和Doppler域差异较小,利用STAP无法检测出目标.此时,可以利用目标与杂波在极化域的差异,结合STAP来提升雷达在杂波背景下检测和跟踪能力.
传统的极化检测和空时检测是彼此分开发展的.Robey[1]和Kelly[2]分别提出了空时自适应匹配滤波检测器(ST-AMF)和广义似然比检测器(ST-GLRT),由于算法具有良好的检测性能、恒虚警特性以及在非高斯背景下的强稳健性,因而倍受诸多学者青睐.文献[3~5]针对不同的杂波背景研究了滤波和检测的新方法.文献[6,7]研究了基于特征分解和基于DFT变换等降秩空时自适应匹配滤波检测器.Maio[8]利用极化差异,研究了一种极化自适应匹配滤波检测器(P-AMF),该算法要比极化广义似然比检测器(P-GLRT)计算量少.文献[9,10]分别研究了全极化雷达高斯背景下和非高斯背景下雷达的自适应目标检测问题,充分利用目标与杂波在极化域和Doppler域的差异来抑制杂波和检测目标,此研究利用IPIX雷达实测数据得到了验证.华盛顿大学Hurtado博士[11,12]研究了通过设计最优收发极化方式,使目标与杂波尽量在极化域分离,达到最优检测与跟踪目的.文献[13,14]利用自适应子空间检测器理论,研究了杂波背景下目标为完全极化波和部分极化波时的检测性能.美国纽约州立大学Park等人结合极化域、空域和时域信息,提出了联合极化空时广义似然比(PSTGLRT)检测器[15,16],并且通过理论推导和仿真实验验证了PST-GLRT性能明显优于ST-GLRT,但是其计算量增大.
综上所述,利用目标的极化信息在杂波背景下检测慢速运动目标成为一种趋势.然而,以上利用目标极化和Doppler域信息的大部分检测器都是基于地基雷达.由于机载雷达运动使杂波着色,使得适用地基雷达的极化Doppler域联合检测理论无法直接应用.因此,研究一种计算量少、适合机载雷达检测慢速运动目标的检测器很有必要.
2 信号模型
假设机载极化阵列雷达系统由N个矢量传感器组成的均匀线阵,每个传感器能够发射和接收任意极化的电磁波.在一个脉冲重复周期(CPI)内传感器的每个通道接收M串相干脉冲串数据,采样输出数据构成N×M的矩阵.为了便于数据处理,将每个通道子阵接收数据矩阵拉直为NM×1列向量.雷达接收信号的二元假设检验模型为

H0假设表示待检测单元回波信号中不存在目标,只包含杂波和噪声.H1假设表示待检测单元回波信号中包含目标、杂波和噪声.式(1)中,x和x s(k)分别为待检测单元和辅助距离单元接收极化空时数据.a为极化矢量,代表目标的幅度、相位以及极化信息.S=I q⊗s,其中,I q为q×q的单位矩阵,q为传感器通道数,通常情况下假设由电偶极子对组成,q=2,即H通道和V通道,s=s s⊗s t为目标归一化空时导向矢量,其值为
s s=[1 exp(j2πfs) … exp(j2π(N-1)fs)]T/N
s t=[1 exp(j2πfd) … exp(j2π(M-1)fd)]T/M,fs=d cosθcosφ/λ和fd=2vr/(λPRF)分别为归一化后目标空间频率和Doppler频率,其中(θ,φ)为波束指向,vr为目标相对于载机的径向速度,d为阵元间的距离,λ和PRF分别为雷达工作波长和脉冲重复频率.q,q s(k)为杂波加噪声分量,满足零均值多变量的复高斯分布,q,q s(k)~CN2J(0,R),J=MN为空时采样数.R为杂波加噪声极化空时协方差矩阵,可表示为[15,16]
其中, 和R¯ st分别代表H通道杂波功率和归一化的空时协方差矩阵,R p为极化协方差矩阵,反应杂波的极化特性,I2J为2J×2J的单位矩阵.rc为V通道与H通道杂波功率比,ρc= ρc e-j¯η为两通道接收杂波信号的相关系数,其中¯η为两通道统计相位差.当rc=1时,杂波极化度(CDP :clutter degree of polarization)为 ρp=|ρc|.
和R¯ st分别代表H通道杂波功率和归一化的空时协方差矩阵,R p为极化协方差矩阵,反应杂波的极化特性,I2J为2J×2J的单位矩阵.rc为V通道与H通道杂波功率比,ρc= ρc e-j¯η为两通道接收杂波信号的相关系数,其中¯η为两通道统计相位差.当rc=1时,杂波极化度(CDP :clutter degree of polarization)为 ρp=|ρc|.
3 极化空时自适应匹配滤波检测器算法(PST-AMF)
研究检测器算法中最重要的是检验统计量的求取,文献[1,2]分别提出了基于似然比的自适应匹配滤波检测算法(AMF)和广义似然比检测算法(GLRT).这些算法在极化阵列雷达中能否应用,以及目标极化状态未知时如何求取检验统计量、检测概率和虚警概率的解析表达式是接下来研究的重点内容.
3.1 检验统计量
高斯杂波背景下,接收信号的概率密度函数为

其中,μ=0,1分别代表待检测单元目标不存在与目标存在假设,则似然函数为
首先假设在杂波协方差矩阵R和目标空时导向矢量S已知,通过极化矢量 a最大化似然函数为

将ˆa代入式(5)后取对数为
由式(9)得到新的检验统计量为
然而在雷达的实际应用中,杂波协方差矩阵往往未知,通常采用辅助数据的最大似然估计来代替.由式(10)得到极化空时自适应匹配滤波(PST-AMF)检测器的检验统计量为
式中,η0为 PST-GLRT的检测门限.对比式(11)和(12),可以看出PST-AMF检验统计量少了分母项,对于每一个待检测的距离单元不需要计算1+x HˆR-1 x,其计算量比PST-GLRT显著减小.下面主要推导PST-AMF检测器的恒虚警特性、检测概率和虚警概率.
通过对式(11)进行白化、酉旋转恒等变形等,得到新的统计检验量服从F分布(具体推导过程见附录1)

H0情况下,由式(13)可得2t服从自由度为2q的中心chi-square分布,t的概率密度函数为
H1和 H0 情况下,由式(13)可知 2τ=2¯y H I-1 q ¯y/¯y H W-1¯y 服从自由度为 2(K-Q+1)的中心 chi-square分布,得到 τ的概率密度函数为
3.2 虚警概率
在 ρ一定的条件下,由式(16)和(17),利用分步积分得到虚警概率为
对式(18)进行积分得到虚警概率为
由式(18)和(19)可知虚警概率与辅助数据K,系统自由度数Q,通道数q和检测门限υ0有关,与杂波协方差矩阵无关,所以检测器具备CFAR特性.
3.3 检测概率
在H1情况下,2t服从自由度为2q的非中心chisquare分布,非中心参数为2ζ,2τ服从自由度为2(KQ+1)的中心chi-square分布.可知H1下服从非中心参数为2ζ的F分布,根据文献[17]非中心 F分布的累积分布函数(CDF),得到ρ一定检测概率

PST-AMF与Park等人提出的PST-GLRT检测算法有相似的解析表达式,不同的是对于每个待检测的距离单元,PST-AMF无需计算1+x HˆR-1 x,计算量减少,易于工程实现.
4 性能评估
仿真初始参数设置:假设极化阵列为正侧视均匀线阵,阵元个数为 4,等间隔排布,间距为 1/3m;一个CPI处理的相干脉冲个数为5,脉冲重复频率为300Hz,雷达工作波长为2/3m.阵列波束指向方位角和俯仰角为(90°,4°)(方位角以机头方向为0°),载机飞行速度为50m/s.H通道输入杂噪比30dB,V通道与H通道杂波功率比rc=1,此时杂波的极化度(CDP)ρp=|ρc|,统计相位差 ¯η= .V通道与H通道目标相位差 η=0°,目标方向为波束指向.虚警概率PFA=1e-6,极化空时自适应处理系统自由度Q=40,q=2.空时自适应处理时,系统自由度Q=20,q=1.
.V通道与H通道目标相位差 η=0°,目标方向为波束指向.虚警概率PFA=1e-6,极化空时自适应处理系统自由度Q=40,q=2.空时自适应处理时,系统自由度Q=20,q=1.
4.1 不同K值情况下,PST-AMF与PST-GLRT性能对比分析
假设辅助数据K=(80,120,144)时,PST-AMF和PST-GLRT检测概率随输入信噪比的变化曲线如图1所示.由图可以看出:(1)PST-AMF的检测性能比PSTGLRT检测性能略差;(2)随着辅助数据K增大,以及信噪比的增大,PST-AMF与PST-GLRT检测性能基本相当.然而,对比式(11)和(12),本文提出的PST-AMF的检测算法,计算量少,性能基本相当.

4.2 目标Doppler频率与杂波极化度对检测性能的影响
V通道与H通道的目标功率比 rt=1,辅助数据K=144,极化度分别取 ρp=(0.99,0.8,0.5,0)时,极化空时自适应匹配滤波检测器与H/V通道空时自适应匹配滤波检测器的检测概率随目标归一化Doppler频率的变化如图2所示.得到如下结论:(1)杂波极化度越高,PST-AMF的检测性能越好,明显优于单个通道H/V-STAMF的检测性能;(2)当杂波极化度较低时,极化度对PST-AMF的检测性能影响不大.

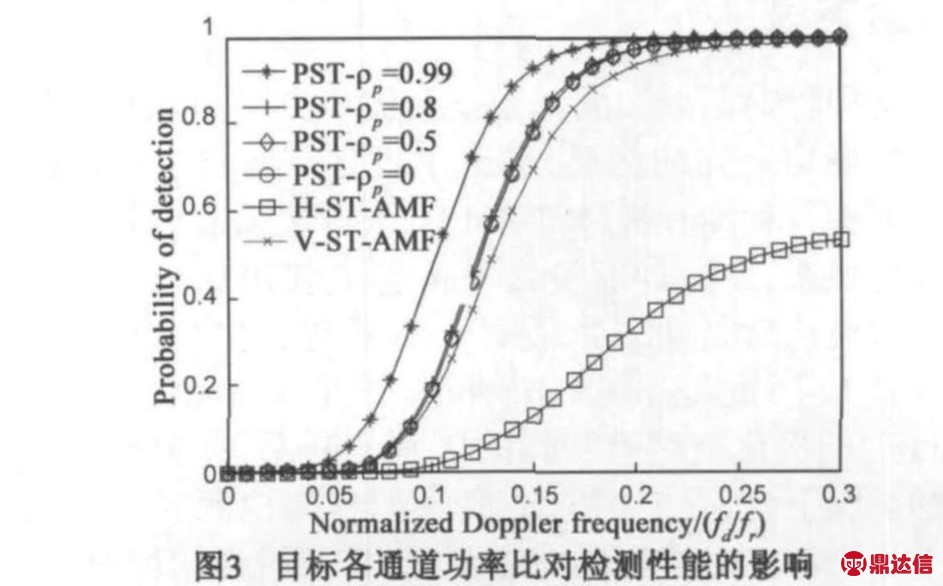
4.3 目标各通道功率比对检测性能的影响
V通道与H通道的目标功率比rt=2,辅助数据K=144,极化度分别取 ρp=(0.99,0.8,0.5,0)时,PSTAMF与H或V通道空时自适应匹配滤波检测器的检测概率随目标归一化Doppler频率的变化如图3所示.由图可以看出:(1)V通道的检测概率明显高于H通道的检测概率;(2)PST-AMF的检测概率高于单个通道的检测概率.由此得出极化空时自适应匹配滤波检测器具备很强的稳健性,避免了目标信号强度在不同极化通道分布不均带来的损失.
4.4 输入信杂噪比对检测性能的影响
假设H通道和V通道输入杂噪比为30dB,单个通道单个脉冲输入信噪比由0dB~25dB.图4给出了归一化多普勒频率 fd=0.01和fd=0.1时检测概率随输入信杂噪比的变化曲线.
对比图4(a)和(b)可以得出:(1)目标慢速运动时,即fd=0.01,PST-AMF的检测性能明显优于H通道STAMF;(2)fd=0.01时,高极化度时PST-AMF的检测性能明显优于低极化度PST-AMF和ST-AMF的检测性能,即目标慢速运动时,极化度对PST-AMF性能影响较大;(3)fd=0.1时,PST-AMF比ST-AMF检测性能改善不是很明显,主要原因是目标径向速度较快时,利用空时自适应处理能够很好地将杂波抑制,极化信息所起的作用减弱.因此,极化空时自适应处理对于在强杂波背景下检测慢速运动目标,性能改善明显.

5 结束语
文中针对高斯杂波背景下杂波协方差矩阵和目标极化矢量均未知的情况,提出了极化空时自适应匹配滤波恒虚警检测算法(PST-AMF).该方法无需已知目标的极化状态,并且计算量比Park等人提出的极化空时广义似然比检测算法少,易于工程实现.对比分析了基于自适应匹配滤波(AMF)和基于广义似然比检验(GLRT)的极化空时检测器的区别与联系.在辅助数据足够情况下,极化空时自适应匹配滤波检测器比任意单个通道的空时检测器性能要好,具备很强的稳健性,并且还克服了目标能量在不同极化通道分配不均带来的空时处理检测性能明显下降(如图3所示).当杂波极化度较高时,极化空时处理检测慢速运动目标能力明显优于空时处理.存在不足,杂波低极化度时,极化空时处理性能改善不明显.
文中推导的基于AMF检测概率和虚警概率解析表达式具备通用性,适应于高斯杂波背景下目标为完全极化波时极化域空域联合检测、空时自适应恒虚警检测、极化空时自适应恒虚警检测、极化SAR检测.主要不同点在于非中心参数中滤波输出信干噪比和系统自由度Q等,只需改变检测概率和虚警概率表达式中参数就能获得相关检测算法的理论性能.
附录
将采样协方差矩阵ˆR=A/K=XX H/K代入式(11),得到
由于 X每一列矢量满足独立同分布,所以 A服从自由度为K的Q维Wishart分布[18],记为A~CW(K,Q,R).由于R为Hermite矩阵,对R进行Cholesky分解为R=R1/2(R1/2)H,利用 R-1/2先将接收数据白化,式(a1)可表示为

式中,Γ为白化后归一化的目标导向矢量,z和B分别为白化后待检测单元输出数据和白化后辅助数据协方差矩阵

式(a3)中B的期望值为I Q×Q,由于只对A做旋转白化变换,不改变分布特性,所以 B~CW(K,Q,I).由于rank(Γ)=q,存在酉矩阵矩阵 U将 Γ变成Γ1=UΓ=I q;0|(Q-q)×q ,其中,I q代表q×q的单位矩阵,0代表..的零矩阵.式(a2)可变换为

式中,z1=Uz=UR-1/2 x为经过白化和酉旋转变换后的主数据.C=UBU H=UR-1/2 A(UR-1/2)H,由于只做线性旋转变换不改变分布特性,C~CW(K,Q,I).为表述方便,省略下标“1”重写为
根据导向矢量 Γ的结构,将经过白化和 U变换后的主数据z和辅助数据z s(k)分成两部分

由于C~CW(K,Q,I),根据多元统计分析中Wishart分布的性质,由文献[19],得到
式中, .由于 z A和z B为彼此独立的复高斯随机矢量,所以根据文献[15],式(a15)在B部分元素一定的情况下,y服从复高斯分布,y的均值和协方差为
.由于 z A和z B为彼此独立的复高斯随机矢量,所以根据文献[15],式(a15)在B部分元素一定的情况下,y服从复高斯分布,y的均值和协方差为
式中,ρ为信噪比损失因子[2]
利用多元统计分析中复分布之间的关系,由文献[19]可知 H1情况下,2t=2¯y H I-1 q¯y 服从自由度为2q 的非中心chi-square分布,其非中心参数2ζ为
式中,ξ=a H S H R-1 Sa最优滤波后输出信干噪比.H0下2t=2¯y H I-1 q¯y服从自由度为2q的中心chi-square分布.
H1和 H 0情况下 ,由文献[19]可知 2τ=2¯y H I-1 q ¯y/¯y H W-1¯y 服从自由度为 2(K-Q+1)的中心 chi-square分布.所以,得到检验统计量的分布特性为

本文推导的基于任意极化通道回波信息的PSTAMF检测算法,类似于文献[15]的推导,但是推导过程要比文献简单,且计算量比文献[15]中提出的PSTGLRT少.


