
摘 要:为了顺应智慧交通技术的发展需求,进一步提高车辆检测的准确率,提出了基于地磁感应的新型无线车辆检测器设计思想,该设计集成传感网ZigBee、时钟同步以及地磁感应等技术;检测器硬件以ZigBee芯片MC13213为核心,外围扩展无线高频模块,并通过IIC接口与地磁芯片MAG3110支撑电路相连;软件则是通过在主控芯片中植入具有地磁检测算法,运用时钟同步、无线网等技术从而实现车速、车长等重要数据估算;经过应用测试分析,该检测器器能针对不同车型、不同车速等作出正确响应,准确率可达97%以上,应用前景十分广阔。
关键词:地磁感应;ZigBee;时钟同步;车辆;检测器
0 引言
随着传感网技术的发展,车辆数据采集实现无线化是智慧交通技术应用的基础[1-3]。利用地磁感应原理制成的车辆无线检测器具有安装简单、维修方便、对非铁磁物质无反应、受气候影响小等特点,明显优于感应线圈检测器、视频检测器以及微波检测器等车辆检测方法。
国内外现已经出现了一些基于地磁感应的无线车辆检测器的研究和开发工作,如文献 [4-5]等中的设计大都能够判断车辆是否经过、行进方向,并可以进行车速估算,具有一定的实用性,但由于该设计方案均假设车辆经过检测器速度是不变的(即匀速),而实际交通场景中车辆随时都可能是暂停、加速或减速(即变速),所以该检测器的精度存在较大误差,不能满足未来智慧交通发展的高标准要求。
本文提出了一种基于地磁感应的新型无线车辆检测器设计,运用传感网ZigBee、时钟同步以及地磁感应等技术实现车辆检测数据无线交换和计算,可以在极大降低成本的基础上,进一步解决当前车辆检测器的智能化水平低、精度低等问题。
1 应用架构
该新型无线车辆检测器应用架构体系如图1所示。主要由ZigBee传感网、网关、移动基站以及Internet组成。虽然不同的智慧交通应用对传感器网络布点数量需求不同,但传感器网络节点拓扑结构基本相同,即“链式”结构。当有车辆进入地磁感应区时,该时钟同步以后的检测器(无线感应节点)通过无线网载体,将所采集的车辆信息实现相邻节点间的数据交换,通过算法最终得出车辆的速度、长度(即车型)等信息,并通过传感网、移动网与Internet传送至道路交通控制中心。
2 硬件设计
根据新型无线车辆检测器所实现的主要功能,硬件部分如图2所示,主要包括:微处理器(MCU)模块、ZigBee射频模块、地磁检测模块、以及其他模块(电源管理模块、串口调试模块、写入器接口模块以及复位模块)等。
2.1 微处理器
微处理器选用Freescale公司的MC13213芯片,该芯片是针对ZigBee技术推出的完整单芯片解决方案,使用2.4GISM免费频段,其内部集成了HCS08MCU 和遵循IEEE 802.15.4标准的第二代无线射频收发器 MC1320x,也称为 Modem。MC13213能够以非常低的总材料成本建立强大的网络节点,拥有较大的Flash,其存储容量多达60kB,内部还集成定时器、IIC总线、A/D、输入捕捉等若干功能模块,是理想的ZigBee专业应用芯片[6]。
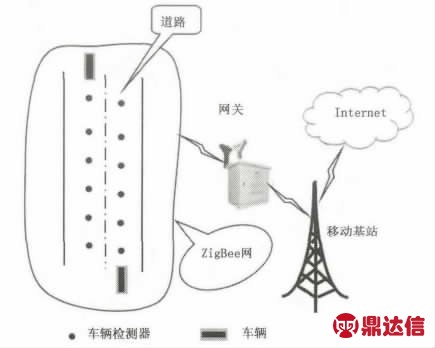
图1 新型无线磁车辆检测器应用架构示意图
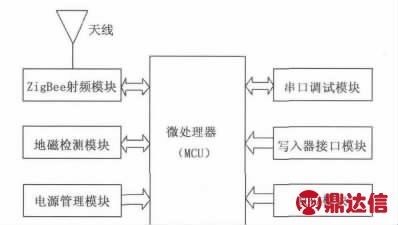
图2 新型检测器硬件框图
MCU 模块为控制器的核心构件,不仅对地磁感应构件电路信号进行采集与处理,而且实现相邻ZigBee节点(无线地磁检测模块)计时、组网、数据传输等功能。处理器模块的最小系统具体硬件电路连接参照文献 [6]。
2.2 ZigBee射频模块
ZigBee射频模块是实现无线通信关键部件,Freescale官方给出的设计方案有3种,本设计采用用MC13213内部T/R开关的单天线配置方案,具体见参考文献 [4]。特别指出,对于所有的射频电路设计,尤其是对于2.4 GHz的高频设计,电路板的布线是很重要的一部分,即便是一个很短的布线产生的一个很小的寄生阻抗(通常是诱导的),都会在其余的电路中被补偿,从而对产品的性能造成影响。因此,最终射频性能好坏除了电路本身,还与PCB 板布局、板叠层的厚度、微带宽等诸多因素有关。
2.3 地磁检测模块
地磁检测器主要通过检测磁场的变化来判断有无车辆通过。本设计采用Freescale公司的微型低功耗数字三轴磁力计MAG3110。它可以与三轴加速度计结合使用以产生准确的罗盘航向信息。它具有一个标准的IIC串行接口和智能嵌入式功能。MAG3110能测量磁场与输出数据的速率高达80 Hz。这些数据的采样间隔从12 ms到数秒。它使用塑料QFN 封装,能可靠的运行在-40~+85℃的温度范围。
MAG3110使用3.3V 供电,通过IIC 总线与MCU 相连。测量范围:±1 000μt,测量精度0.10μt,噪音低至0.25μt,IIC总线最高频率400kHz(高速模式),符合RoHS标准。
2.4 其他模块
电源管理模块,是供给整个检测器电源、保证检测器稳定工作的模块,电源模块采用220V、50 Hz交流电源供电,经过一系列的变换电路最终输出5 V、3.3 V 直流电压供给MC13213 最小系统、射频模块以及其他电路使用。
串口调试模块,为了降低开发成本,调试初期PC 方使用数据线与检测器相连,实现检测器数据的直观显示。
写入器模块,也称BDM 接口,模块主要实现应用程序的擦除与下载、应用程序的动态调试以及配置、修复MCU 内部资源等功能。
复位模块,主要提供一个手动按钮和相关支撑电路,当检测器异常时,可以通过人工方式复位,使检测器立即进入到初始状态,并且从用户定义的存储器地址开始执行程序。
上述其他功能模块的具体实现电路均可参照文献 [6]。
3 车辆检测
车辆的检测数据源于部署在道路上的2 个无线检测器(Detector Node,DN)组成。如图3所示,每个检测器分别由磁阻感应器、微型处理器、识别软件、无线通信系统、电源和外层保护盒组成。2 个检测器之间间隔距离记为Ld(取值可在4m 至8m 之间,如:间距5m)。
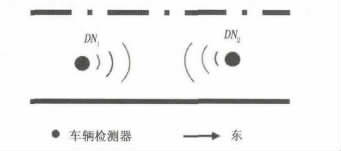
图3 安装在道路上的新型车辆检测器
3.1 阀值的选取
通过设定特殊阈值,阈值(记为:q)的选取直接影响检测算法的准确率,将有无车辆经过的磁场分开,通常的做法是将阀值的选取为基准值(记为:b)的5%(实验取得的基准值为100),即q=b×5%=100×0.05=105,即阀值q选取值为105。
3.2 车辆通过判别
由于实际应用中的干扰因素很多,造成干扰的时长、大小情况十分复杂,因此,仅依据磁场感应值是否大于阈值q判断有无车辆通过并不可靠,这也是现有检测器常误判的因素之一。
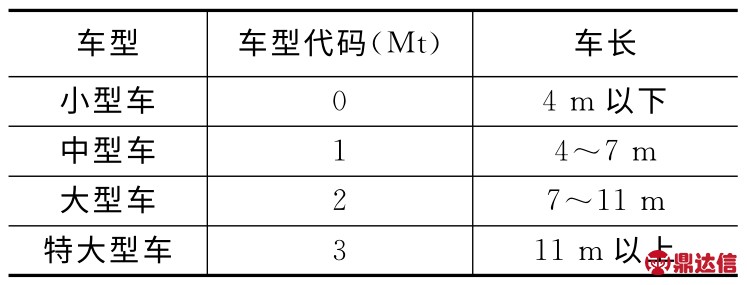
在本文的实验中,是采用阀值加干扰时长判别法确认是否有车辆经过,具体做法是:先将车辆分类,如表1所示。
再由车长记Lcar,车速记Vcar得出车辆经过一个检测器的时间Tcar为:
车型车型代码(Mt)车长(单位:m)小型车04m 以下中型车14~7m 大型车27~11m 特大型车311m 以上取样时,将车长Lcar取4m,道路车辆限速Vcar取150km/h,代入公式(1)中计算出一辆小型车通过一个检测器Tcar至少要用时0.096s,约10ms。结合q和Tcar两个条件,即当检测器感应到磁场变化大于阀值q(即为105)且磁场值变化持续时间大于Tcar时,则判断确有车辆通过,经过多次测试,此方法有效提高了车辆通过识别率。
表1 车型分类
3.3 车速判别
按图3所示的地磁检测器安装方法,设地磁检测器的2个感应器分别为DN1、DN2,2个感应器的间距为Ld(可以根据需要在一定范围内调整,调整范围为4~8m),车辆为从西向东行驶,设有车辆i经过地磁检测器,记录车辆i到达和驶离DN1的时刻分别记做T1i1、T1i2,到达和驶离DN2的时刻分别记做T2i1、T2i2,那么车速的Vcar计算公式:
式中的感应器的间距Ld 在安装时已经固定,ΔT为 时间间隔:ΔT=T2i1-T1i1,或ΔT=T2i2-T1i2。
由于记录车辆到达的时刻T1i1、T2i1或(T1i2、T2i2)精度要求比较高,因此,必须引入时钟同步技术,在最多的时钟同步算法中,参考广播同步机制(reference broadcast synchronization,RBS)[7]是比较理想的选择,该机制利用了无线数据链路层的广播信道特性,一个第三方无线节点发送广播消息,接收到广播消息的另外两个无线检测器通过比较各自接收到广播消息的同步时刻,来实现它们之间的时间同步。
本设计结果多次测试,相邻检测器经过时钟同步以后的时间误差小于0.1ms,完全满足精度要求。
3.4 车型判别
根据表1,车型的判别取决于车长。而车长的估算取决于车辆i的速度Vcar以及经过DN1 的时间差ΔT1=T1i2- T1i1(也可通过车辆i经过DN2的时间差ΔT2=T2i2-T2i1估算车长)。
由于车辆在分别经过两个检测器存在变速的可能(加速或减速),因此,为了提高车长计算精度,将车辆i经过DN1、DN2的车长Lcar分别求出并计算平均值,此法大大提高车型的估算精度。
4 测试与分析
为了测试该新型无线车辆检测器的感应性能,结合道路特点,将无线ZigBee数据帧简化成如表2所示。同时将两台传感器保持相同敏感轴方向,平行于道路,由东向西放置。DN1号在前,DN2 号在后,两者相距5m。检测器上电后,由第三方发送时钟同步信号,DN1、DN2 分别反馈确认时钟已经同步。车速实际测量中,选择车身长度为4.5m 的小轿车,从最低速15km/h至最高速150km/h 以8个不同速度等级通过新型车辆检测器,统计结果如图4所示,车辆实际速度和检测结果比较吻合,经计算准确率为97.87%。
车长实际测量中,分别选择4种车型,车产分别为3.3m(小型面包车)、4.5 m(小轿车)、7.6 m(大型面包车)、11.6m(特大型半挂车),分别以15 km/h、35 km/h、65km/h、85km/h共4 种速度测试,所得数据如图5 所示,车辆实际长度和检测结果也比较吻合,经计算准确率为97.92%。
表2 控制器无线命令帧格式
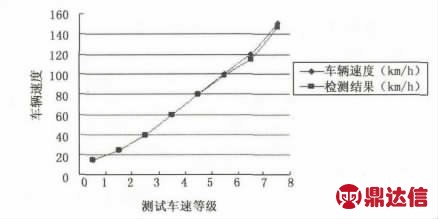
图4 车速测试结果对照图
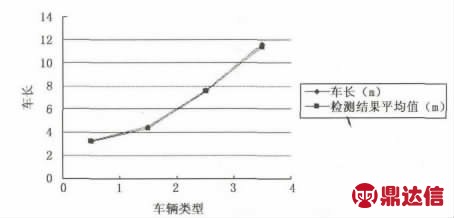
图5 车长测试结果对照图
5 结束语
运用无线ZigBee、地磁感应检测以及时钟同步等技术设计的新型无线车辆检测器设计,可以在提升现代交通领域智能化水平的同时,进一步提高车辆检测的准确率。经过测试和分析,该检测器具有性能稳定,误判率低等特点。
同时,这种新型无线车辆检测器,安装简易快捷,可以悬挂在现有的路口交通杆也可以部署在路基上,不仅节省了人力物力成本,而且不受天气和地形的影响,保证了通讯的可靠性,简化了系统后期的维护工作,社会效益和经济效益前景广阔。


