
摘 要: 本文提出了一种适用于MIMO阵列雷达系统的空域降维检测器,该检测器先将接收到的观测矢量按所对应的不同分集波形分别在接收阵列上进行空时自适应Capon滤波,然后基于各个分集波形的滤波输出设计CFAR检验统计量,从而避免了在高维虚拟阵列上进行完全自适应处理而带来的高计算复杂度和对训练数据量的过分需求.理论推导表明,在大杂噪比条件下,该检测器可等价地表述为各个分集波形自适应Capon滤波输出结果的相参积累与非相参积累之比.同时,大杂噪比条件下的检测性能分析表明,随着波形分集数的增长:当各发射阵元辐射功率一定时,该检测器的检测性能逐渐接近完全自适应CFAR检测器,而计算复杂度以及对训练数据的需求几乎不变;而当总发射功率一定时,其检测性能先是快速增长,然后呈阶梯式缓慢增长,且存在性能上限.这些结论对于MIMO阵列雷达系统设计来说具有一定的指导意义.
关键词: MIMO阵列雷达;空域降维检测器;统计恒等分解;CFAR检验统计量
1 引言
在MIMO阵列雷达目标检测问题的研究中,高维数的观测空间给MIMO阵列雷达提供了优良的杂波抑制能力和方位分辨能力[1,2],但同时也给检测器的设计带来了诸多问题,例如,大大增加了所需的训练数据量和样本矩阵求逆的运算量,这些都成为构造MIMO阵列雷达检测器的主要瓶颈.文献[3]考虑了这些问题,提出了利用MIMO阵列雷达的几何参数以及长球面波函数来估计杂波子空间的方法,该方法的最大优点是无需训练样本、计算量很小,但其缺点是缺乏对背景的自适应能力.文献[4]从阵列信号处理的角度,采用常用的对角加载技术,提出了基于对角加载的MIMO雷达GLRT检测器,解决了因参考数据不足所引起的矩阵病态问题.而本文则是基于MIMO阵列雷达自身的特点,考虑了计算负担和背景自适应能力这两个方面,设计并分析了一种需要较少训练数据量并具有一定背景自适应能力的空域降维检测器.
文中各种符号含义如下:x表示变量,x表示矢量,X表示矩阵,上标H表示共轭转置,上标T表示转置,⊗是右Kronecker积,Diag(◦)表示模块对角化操作,E{◦}表示取期望.
2 信号模型
假设MIMO阵列雷达有M个发射阵元和N个接收阵元,阵元间距分别为Nλ/2和λ/2,λ是波长.发射分集数等于发射阵元数,每个分集波形包含L个脉内正交编码的相参脉冲.
目标回波经过各个分集波形的匹配滤波器之后采样得到观测矢量yt=ρts,其中s=a(θt)⊗b(fd,t)⊗c(θt)表示发射阵-脉冲串-接收阵三部分形成的总的空时响应矢量;a(θt)、b(fd,t)和c(θt)分别是发射阵列、时域多普勒和接收阵列的响应矢量,将三者简记为at、bt和ct,且这三个矢量中每个元素的模都为1;θt是目标方位,fd,t是目标归一化多普勒频率;ρt是目标回波的复幅度,定义SNRin=|ρt|2/ 表示杂波抑制和相参积累之前的信噪比,其中
表示杂波抑制和相参积累之前的信噪比,其中 是热噪声功率水平;用ut=bt⊗ct表示接收阵列上的目标空时响应矢量.
是热噪声功率水平;用ut=bt⊗ct表示接收阵列上的目标空时响应矢量.
采用文献[5]中的杂波模型,杂波观测矢量yc是0均值,协方差矩阵为Rc的复高斯随机矢量,

θi和fd,i分别是第i(i=1,…,Nc)个杂波点的方位和归一化多普勒频率; 是每个杂波采样点的平均功率水平;定义杂噪比CNR=Nc
是每个杂波采样点的平均功率水平;定义杂噪比CNR=Nc /
/ ,Nc是观测空域中杂波点的总数.最后,假设接收机热噪声观测矢量yn是零均值、协方差矩阵为Rn=
,Nc是观测空域中杂波点的总数.最后,假设接收机热噪声观测矢量yn是零均值、协方差矩阵为Rn= IMLN的复高斯随机矢量,其中IMLN表示MLN×MLN维的单位阵.
IMLN的复高斯随机矢量,其中IMLN表示MLN×MLN维的单位阵.
3 MIMO阵列雷达空域降维检测器
根据第2节的信号模型,MIMO阵列雷达检测问题可归结为如下假设检验问题,
其中,H0假设条件下,观测矢量y是零均值,协方差矩阵为 R=Rc+Rn的复高斯随机矢量,
R=Rc+Rn的复高斯随机矢量, 是检验单元背景相对于参考距离单元背景功率水平的尺度因子,R是参考距离单元中的背景协方差矩阵;H1假设条件下,均值矢量变为ρts.基于式(2)的假设检验可推导完全自适应的MIMO阵列雷达CFAR检测器,见式(12),它在形式上与文献[6]给出的检测器相同,其中需要估计R.当要求R的估计损失在3dB以内时,至少需要2MLN个训练数据,这种需求往往不切实际,而且MLN维矩阵求逆的计算量也很大.为了降低计算负担并保持对背景的一定自适应能力,本节提出了一种空域降维检测器.
是检验单元背景相对于参考距离单元背景功率水平的尺度因子,R是参考距离单元中的背景协方差矩阵;H1假设条件下,均值矢量变为ρts.基于式(2)的假设检验可推导完全自适应的MIMO阵列雷达CFAR检测器,见式(12),它在形式上与文献[6]给出的检测器相同,其中需要估计R.当要求R的估计损失在3dB以内时,至少需要2MLN个训练数据,这种需求往往不切实际,而且MLN维矩阵求逆的计算量也很大.为了降低计算负担并保持对背景的一定自适应能力,本节提出了一种空域降维检测器.
为了便于描述,下面将协方差矩阵R划分成互不重叠的M2个LN×LN维子矩阵,再由Rc和Rn的表达式可知,R具有如下两个特点:(1)其对角线上的M个子矩阵R11,…,RMM完全相同,统一简记为R0;(2)其非对角线上各子矩阵Rmm′(m,m′=1,…,M,且m≠m′)都只包含杂波成分.那么,空域降维检测器的具体设计步骤如下所述:首先将接收到的观测矢量按所对应的不同分集波形分别在接收阵列上进行LN维的空时自适应Capon滤波,然后基于各个分集波形的滤波结果构造M维CFAR检验统计量.其中,第m个分集波形对应的空时自适应Capon滤波器权矢量为wm= ut/(
ut/( ut),由R的第一个特点可知,这M个权矢量w1,…,wM都是相同的,统一简记为w0.根据上述步骤可得如下形式的空域降维检测器,
ut),由R的第一个特点可知,这M个权矢量w1,…,wM都是相同的,统一简记为w0.根据上述步骤可得如下形式的空域降维检测器,
其中权矩阵W是模块对角矩阵W=Diag(w0,…,w0);矢量z=WHyr;yd和yr分别表示检测单元和参考距离单元中的观测矢量y,yr就是训练数据;那么,

任取Rz的非对角线元素![]() 考察其分子中的
考察其分子中的![]() 项,其中
项,其中![]()
![]() 其第二个等式利用了R的第二个特点,yr,m、yr,m′和yr,c,m、yr,c,m′分别是第m、m′个分集波形对应的参考距离单元中的观测矢量和杂波观测矢量.
其第二个等式利用了R的第二个特点,yr,m、yr,m′和yr,c,m、yr,c,m′分别是第m、m′个分集波形对应的参考距离单元中的观测矢量和杂波观测矢量.
一般地,在对地/海观测中,杂噪比CNR通常很强,达到数十个分贝.根据文献[7],在大杂噪比条件下, ≈
≈ ,其中表示每个分集波形回波中包含的杂波子空间的补空间投影算子.那么,Rz的非对角线元素分子中的
,其中表示每个分集波形回波中包含的杂波子空间的补空间投影算子.那么,Rz的非对角线元素分子中的
 项满足下式,
项满足下式,
因此,在大杂噪比条件下,Rz可简化为,
其中IM是M×M维的单位阵.将式(6)代入式(3)中,可将空域降维检测器T1简化为,

T2也是一种空域降维检测器,其中yd,m=at,mρtut+yc,m+yn,m是第m个分集波形对应的检测单元中的观测矢量,at,m是发射阵列响应矢量at的第m个元素.在式(7)的分子和分母中同时除以 ut,可将检测器T2变形为,
ut,可将检测器T2变形为,
在式(8)中,将观测矢量yd,m替换为目标观测矢量at,mρtut后可以发现,在对来自M个分集波形的目标观测矢量分别进行LN维空时自适应Capon滤波之后,T2的分子表示“对这M个滤波输出进行相参积累之后的功率”,而T2的分母表示“对这M个滤波输出按平方律进行非相参积累之后的功率”,这就是空域降维检测器T2在检测器结构方面的特点.不过在执行检测的过程中,只需按式(7)来计算检测器T2,而省去对 ut的计算.
ut的计算.
在计算复杂度和对训练数据量的需求方面,在3dB估计损失之内,检测器T2所需的训练数据量最少为2LN/M,显然此数明显小于完全自适应检测器的2MLN;而且检测器T2只涉及LN维的样本协方差矩阵求逆运算,这也远小于完全自适应检测器的MLN维.
4 空域降维检测器T2在检测性能方面的特点
下面根据训练数据量趋向无穷时检测器T2的极限统计量来分析其检测性能.由文献[8]中的统计恒等分解方法可得T2的极限统计量T2,lim,

其中,~表示“统计等价于”,而T2,lim的检测性能又等价于如下F分布统计量的检测性能,
h1是均值为![]() 、方差为1的复高斯随机变量,均值的模平方是M个分集波形对应的空时自适应Capon滤波后的输出信噪比之和,用SNRout=
、方差为1的复高斯随机变量,均值的模平方是M个分集波形对应的空时自适应Capon滤波后的输出信噪比之和,用SNRout= ut|ρt|2M/
ut|ρt|2M/ 表示;
表示; 服从自由度为M-1的中心卡方分布.下面根据式(10),从两个方面分析M逐渐增大时T2的检测性能变化情况.
服从自由度为M-1的中心卡方分布.下面根据式(10),从两个方面分析M逐渐增大时T2的检测性能变化情况.
(1)各个发射阵元辐射功率固定 这种情况类似于有源阵列,此时,R0和ρt不变,故SNRout与M呈线性关系.于是,随着M的增大,T2的检测性能将不断增强,且估计R0时所需的训练数据量不变,而运算量只有极少量的增加.相比之下,完全自适应CFAR检测器会因为M的不断增大而对训练数据量和运算能力提出不切实际的要求.这意味着在这种情况下,当需要较高的检测性能时,可采用较大M值时的空域降维检测器T2,而避开完全自适应检测器的苛刻要求.
(2)MIMO阵列雷达总发射功率Pt固定 这种情况类似于无源阵列.就式(10)的分子来说,由于和 2都与Pt/M呈正比例关系,不妨将此关系表示为
2都与Pt/M呈正比例关系,不妨将此关系表示为 =ηcPt/M和
=ηcPt/M和 2=ηtPt/M,其中,ηc和ηt分别反映了杂波和目标的雷达截面积大小,在观测场景给定的条件下,这两个因素都是常数,于是,
2=ηtPt/M,其中,ηc和ηt分别反映了杂波和目标的雷达截面积大小,在观测场景给定的条件下,这两个因素都是常数,于是,
其中,R0=( +
+ )R00.由式(11)可知,随着M的增加,SNRout也缓慢增加;但当M≫ηcPt/
)R00.由式(11)可知,随着M的增加,SNRout也缓慢增加;但当M≫ηcPt/ 时,SNRout→
时,SNRout→![]() =恒值,此“恒值”是指不随M的变化而变化.根据CNR的定义式,当时,有CNR=NcηcPt/(
=恒值,此“恒值”是指不随M的变化而变化.根据CNR的定义式,当时,有CNR=NcηcPt/( )→0,即R0→
)→0,即R0→ ILN×LN,故SNRout的最大值为
ILN×LN,故SNRout的最大值为![]()
就式(10)的分母来说,随着M的增长,/(M-1)的值能够比较快速的趋向定值1,这意味着此分母对检测性能的影响随着M的增长很快减弱.
综合对式(10)的分子与分母的考虑,在MIMO阵列雷达总发射功率Pt固定的条件下,随着M的增长,空域降维检测器的检测性能将先是快速增长,而后阶梯式缓慢增长,最后抵达其性能上限.其中,检测性能上限为![]()
5 Monte-Carlo仿真与结果分析
部分仿真参数如下所示,发射阵列与接收阵列同基地共线布置;λ=0.03m,θt=30°,fd,t=5.67kHz,Pfa=0.01,Nc=10000,N=4,L=8,=1, =1.其中,所设定的目标参数可保证空域降维检测器在执行杂波抑制时不对目标能量造成过大的损失.
=1.其中,所设定的目标参数可保证空域降维检测器在执行杂波抑制时不对目标能量造成过大的损失.
5.1 不同CNR时,空域降维检测器T1与T2的比较
图1给出了M=5,CNR分别为5dB和80dB时空域降维检测器T1与T2的检测性能曲线,其中横坐标采用SNRin.
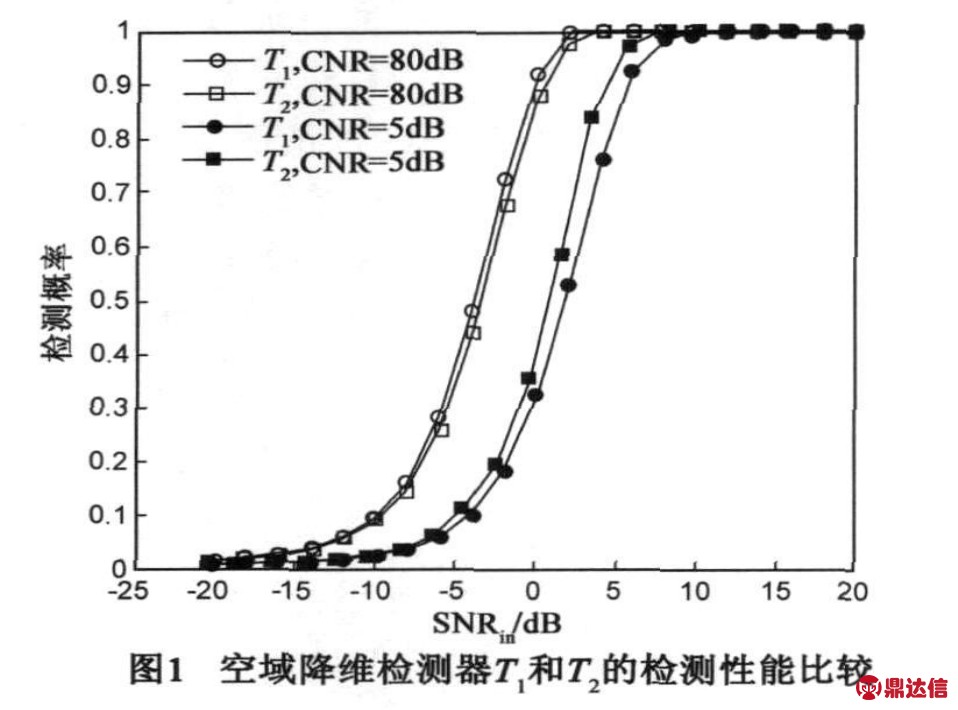
图1中,当CNR=80dB时,空域降维检测器T2的检测性能优于T1,原因在于检测器T2利用了大杂噪比条件下Rz是对角矩阵的特点,因而只需估计R0而无需估计Rz,少了一项估计损失,同时少了一项对训练数据的需求,因此在相同的训练数据量条件下能获得优于T1的检测性能.但是对于CNR=5dB这种低杂噪比的情况,基于大杂噪比条件得出的T2并不具有优势,但这并不意味着低杂噪比时T2的检测性能必然比T1差,因为通过舍弃Rz的非对角元素得到T2而造成的性能损失不一定超过T1中估计Rz带来的损失.
5.2 完全自适应的MIMO阵列雷达CFAR检测器与T2的检测性能比较
本小节的目的是为了验证第4节第(1)点的讨论结果,其中M分别取2,5,10和20.下面先给出完全自适应的MIMO阵列雷达CFAR检测器T3,及其对应的极限统计量T3,lim,

其中极限统计量的推导参见文献[8].h3服从均值为![]() 方差为1的复高斯分布;
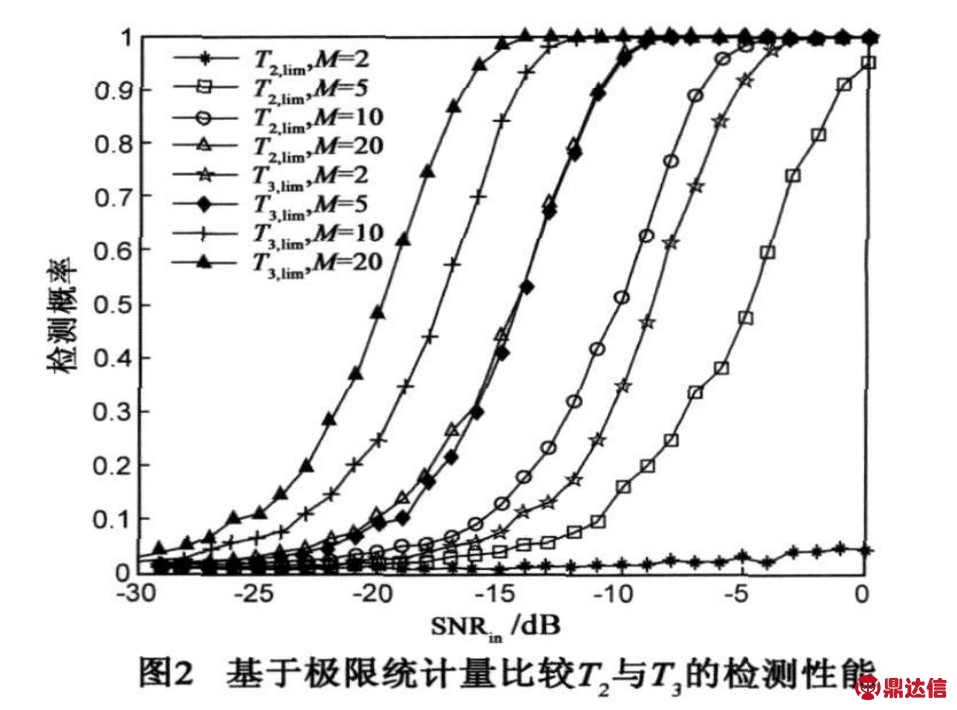
方差为1的复高斯分布; 服从自由度为MLN-1的中心卡方分布.由于M很大时难于直接通过Monte-Carlo仿真获得T3的检测性能,因此图2基于极限统计量对T2和T3进行性能比较,其中横坐标与图1相同.
服从自由度为MLN-1的中心卡方分布.由于M很大时难于直接通过Monte-Carlo仿真获得T3的检测性能,因此图2基于极限统计量对T2和T3进行性能比较,其中横坐标与图1相同.
由图2可知,随着M的增加,检测器T2与T3的性能都在逐渐改善,且两者之间的差距逐渐缩小,从M=2时两者性能相差15dB以上,逐渐减小至M=20时的5dB左右.尽管检测器T3具有较优的检测性能,但是在大M条件下,它对计算复杂度和训练数据量有着不切实际的要求.相比之下,尽管M相同时,检测器T2在性能上稍差于T3,但其在计算复杂度和对训练数据量的需求上几乎不随M的增加而增加,因此完全可以通过增加M来获取更好的检测性能.例如,图中M=20时T2的检测性能就优于M=5时的T3.这些结果与第4节(1)中的结论一致.
5.3 验证总发射功率一定时,空域降维检测器T2的特点
本小节的目的是为了验证第4节第(2)点的讨论结果,其中ηtPt取值分别为0.1,0.5,1和1.5,可以简单的认为这些回波功率值对应着不同的探测距离;而对应杂波平均功率的ηcPt通常要比ηtPt大数十分贝,但本小节为了在有限的M取值范围内验证第4节第(2)点的结论,遂取ηcPt=ηtPt,即较大程度的降低杂波功率.这种做法仅仅相当于将M的取值范围缩小了相同的倍数,不影响本质问题,仅仅是为了便于数值仿真.
由图3可知,其仿真结果与第4节第(2)点的结论一致,其中图3(a)是从图3(b)中截取出来的.图3(a)中,根据本文的仿真参数,CNR的最小取值为10dB,基本满足大杂噪比的要求.T2的检测性能表现为,随着M的增长先是迅速上升,然后进入缓慢增长状态.有意义的是,对于不同的ηtPt取值,T2几乎在相同的M值处进入缓慢增长状态,这是因为其检测性能变化快慢受式(10)的分母影响较大,而其分母只与M有关.为了便于描述,不妨将此M值记为M0.
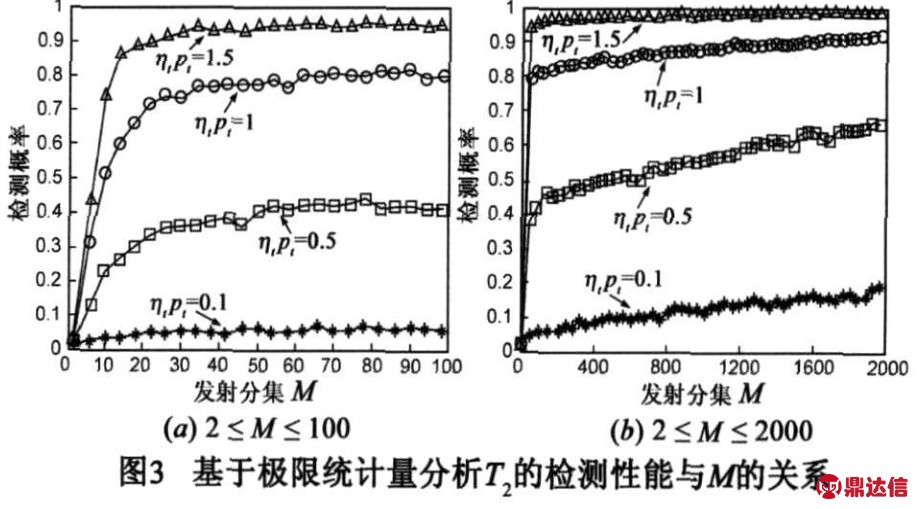
图3(b)中,随着M的不断增长,CNR持续下降,杂波对检测性能的影响越来越小,以至于R0→,此时T2的检测性能逼近各ηtPt值条件下的性能上限.对于给定的ηtPt值,相应的性能上限分别为0.3589,0.9974,1和1.由图3(b)可知,将T2在M0以后的检测性能随M增加的变化趋势描述为阶梯式缓慢增长是比较恰当的,而且这一结论对于MIMO阵列雷达系统中发射分集数量的设计来说具有一定的指导意义.当采用空域降维检测器T2时,一般地,M值越大,检测性能越好;但是当出于成本等其他因素的考虑使得M不能任意大时,就应当利用阶梯式的特点,既尽可能选择较少的M,同时不会造成检测性能的明显下降.以图3(a)所描述的情况为例,当约束M的取值必须小于100时,选择M=100与选择M=50,对于检测性能来说差别不大,而显然选择M=50时更节约成本.
6 总结
MIMO阵列雷达观测空间维数高使得样本协方差矩阵估计面临训练数据量不足以及计算负担重的问题,为此,本文提出了一种适用于MIMO阵列雷达系统的空域降维检测器.该检测器将检测过程分为两步,首先是将接收到的观测矢量按所对应的不同分集波形分别在接收阵列上进行空时自适应Capon滤波,然后基于各个分集波形的滤波输出构造CFAR检验统计量,即将MLN维的空时处理分解为先做LN维的空时处理,再做M维的空域处理,从而大大降低了计算复杂度以及对训练数据量的需求.检测性能方面,当各发射阵元辐射功率一定时,随着发射分集数M的增长,空域降维检测器的检测性能逐渐接近完全自适应CFAR检测器,而同时不显著增加计算复杂度和对训练数据量的需求,在大杂噪比条件下尤其如此;当总发射功率一定时,随着发射分集数M的增长,空域降维检测器的检测性能先是快速增长,然后呈阶梯式缓慢增长,直至逼近性能上限.这些结论对于MIMO阵列雷达系统中发射分集数量的设计来说具有一定的指导意义.
最后,需要指出的是,空域降维检测器为了达到降维的目的,将MLN维的空时处理分解为先做LN维的空时处理,再做M维的空域处理,因此从改善因子的角度来说,空域降维检测器中LN维空时处理的改善因子性能显然不如完全自适应时的MLN维空时处理,前者的性能凹口比后者的宽;可以通过增加前者的M值,使其改善因子曲线沿纵轴往上平移,进而达到并超过后者在较小M值时的性能;但是,当目标子空间落在前者的性能凹口中,而又处于后者的性能凹口之外时,需要很大的M值才能弥补空域降维检测器的这种性能损失.这是本文提出的检测器为达到降维的目的而付出的代价.


