
摘要:随着智能电网的发展,大量高渗透率的分布式电源以集群形式接入电网,通信网络与电力网络耦合不断加深,电力信息物理系统(Cyber-physical system, CPS)的架构不断完善。针对高比例分布式电源集群区域电网,提出了基于多代理一致性的群内自治和群间协调结合的分层协同控制方案。为了全面考虑通信系统对集群控制的影响,搭建了基于RT-LAB和OPNET的电力信息实时仿真平台,准确反映通信网络性能以及精确模拟策略的发出、通信、延时及响应全过程。另外,实现了控制器硬件在环,针对所提集群控制策略开发了集群控制器硬件。在CPS架构下通过不同通信场景下集群算例的仿真,验证了集群控制策略的有效性和本仿真平台的可行性和准确性。
关键词:信息物理系统;分布式电源集群;实时仿真平台
0 引言
信息物理系统(Cyber-physical system, CPS)是一种利用3C技术(Computing、Communication、Control)融合物理系统、通信系统、计算机的多维度智能技术体系[1-2]。近年来,随着智能电网的发展,大量高密度的分布式电源以集群形式接入电网,各种通信设备、数据采集设备和电气设备数量也大为增加,通信网络的规模迅速扩大,电力网络与通信网络之间的数据交互更为复杂,智能电网反映出CPS的更多特性,已经可以看作是电力网络和通信网络相互耦合的电力信息物理系统[3-4]。
CPS的典型特征就是借助通信设备感知系统信息,这与目前智能电网的发展趋势一致。智能电网需要实时精确地获取和处理各种信息,包括电力系统中的量测信息和其他外部信息,这依赖于高速、大容量的实时数据交互[5]。目前电力系统的通信方式主要有电缆、光纤、无线通信等,通信拓扑结构日益复杂,对电网的运行控制提出了更高的要求。以微电网控制为例,二次控制一般使用集中控制方式,微电网中央控制器(MGCC)获取并处理整个系统的信息,随着数据量爆发式增长,很容易出现通信故障而导致系统崩溃[6-7]。而在基于多代理系统的分布式协同控制模式下,每个分布式电源仅仅和其相邻的单元共享信息,通信网络稀疏,可靠性大为提高[8]。海量多源化的数据、灵活多变的通信方式以及多样的控制模式,使得电力系统与通信系统之间的交互日益复杂,研究其交互影响机理显得尤为重要。但是目前流行的电力系统仿真软件,如PSCAD、Matlab/Simulink、PowerWorld都不考虑通信系统的影响,常见的通信仿真系统也不能提供电力系统分析。因此,开发有效的仿真平台解决电力网络和信息网络联合仿真的问题迫在眉睫。
传统的电力系统仿真是采用离散时间触发的机制,而通信系统仿真通常是离散事件进行驱动,两个系统的运行机理完全不同,要实现二者之间数据的实时交互非常复杂,目前尚未形成一套统一的仿真软件[9]。国内外对电力信息物理系统的研究主要集中于仿真平台的搭建,目前已经有多种联合仿真平台方案,根据平台实现方式的差异,主要分为三类:第一类方式是通过扩展电力系统仿真软件加入通信模型仿真或者扩展通信仿真软件加入电力系统模型进行仿真;第二类是非实时混合仿真;第三类是实时混合仿真[10-11]。
本文主要针对第三类实时混合仿真开展研究。在此类仿真中,电力系统和通信系统均采用能够实时运行的软件,以便实现整个仿真时间与真实物理时一致。此类平台能够精确模拟系统动态特性,但是平台建设复杂,成本昂贵,还处于起步阶段。文献[12]设计了一种基于Matlab和OPNET的协同仿真平台,采用Cosim接口实现两个系统之间的数据交互,文献[13]提出一种基于VTB和OPNET的仿真平台,设计了一种基于软件代理建立全局时间参考的策略来实现时间同步,文献[14]搭建的平台则基于NS2和Modelica,通过约束Modelica的仿真时间使其与NS2保持一致,文献[15]讨论了利用RTDS和OPNET实现的CPS联合仿真平台,模拟了基于IEC61850的智能变电站的三层架构。
上述文献的研究都是集中于仿真平台的搭建和仿真场景的分析,很少提及电力系统的信息架构和数据传输过程。本文搭建了一种基于RT-LAB和OPNET的联合仿真平台以研究分布式电源集群问题,克服了实物系统受现实条件的限制,具有很强的通用性。可再生能源由于自身具备的优势和国家政策的鼓励,越来越大量又集中地出现在配电网中,形成分布式电源集群,单个集群中可能含有几十个甚至上百个分布式电源。但由于分布式电源出力的不确定性,高分布式电源渗透率会对电力系统的运行稳定性、可靠性和电能质量提出更大的挑战。同时,大量分布式电源的接入也使得电网的数据规模迅速增大,这可能对现有的通信系统的稳定运行造成不利影响。
本文利用所搭建的电力信息实时仿真平台,并结合安徽金寨某电网的实际案例进行相关仿真测试,为实际电网运行提供技术参考,主要工作及创新点如下:
1) 提出一种适用于分布式电源集群的分布式协同控制方案;
2) 仿真验证电力CPS平台的有效性,实现控制器硬件在环;
3) 全面考虑多种通信场景影响,验证了在CPS系统下分布式控制策略的有效性。
1 分布式电源集群仿真框架
面向分布式电源集群的电力信息仿真架构如图1所示,包括中央监控层、集群分区控制层、本地控制层。各个集群内的分布式电源控制器将本地状态信息发送到本地集群控制器中,集群控制器之间共享信息,以实现群间协调控制。同时,集群控制器将每个集群的系统信息发送给监控中心,监控中心可实时监测整个配网集群内的全部状态信息,并根据实际控制策略选择是否下达控制指令到集群控制器,集群控制器依据控制信息将指令发送到集群内的控制终端。
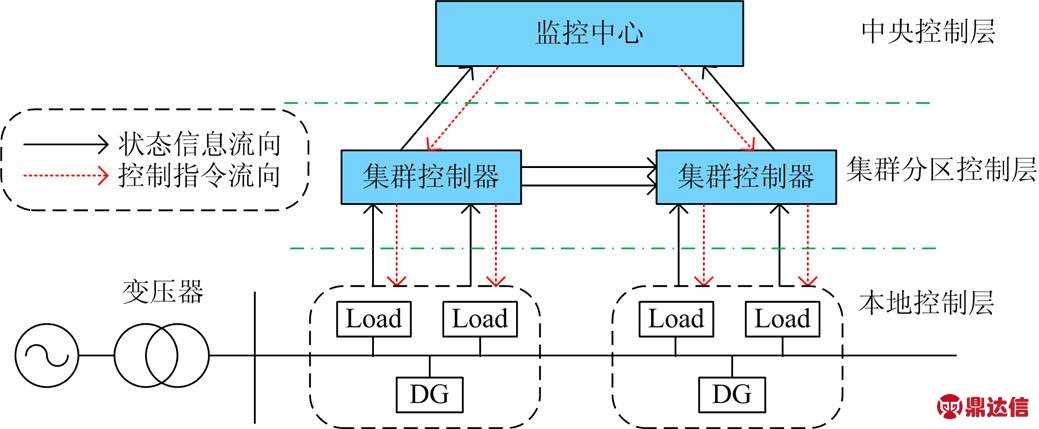
图1 面向分布式电源集群的电力信息架构
Fig. 1 Power cyber-physical system architecture for distributed power clusters
其中,集群控制器在OPNET主机中实现,用来连接本地控制层和中央控制层,如图2所示。电力系统中每一个本地集群控制器都对应OPNET主机中的一个控制子站,即OPNET中的工作站模型stn1、stn2、stn3。同时,在OPNET中设置一个集群控制器虚拟映射,以便于对状态信息和控制信号打包和分发。这些工作站模型均设置在不同子网下,通过路由器相连。
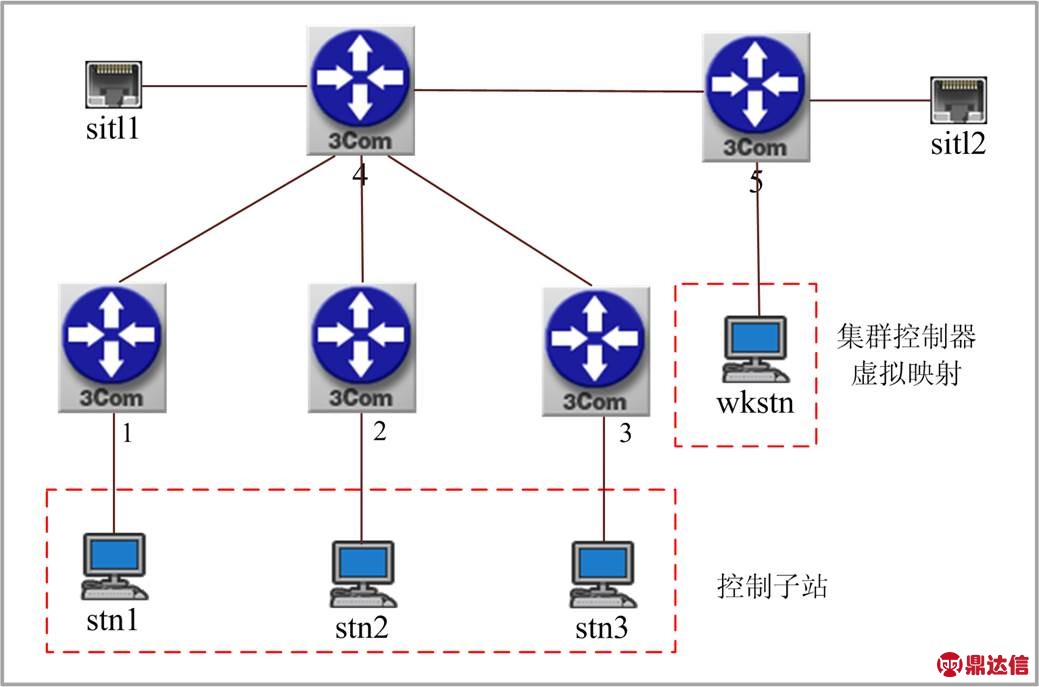
图2 OPNET通信系统
Fig. 2 OPNET communication system
2 电力信息实时仿真平台架构
电力信息实时仿真平台需要能实现两个仿真系统之间的数据交互,两个系统之间的接口充当数据缓冲区,允许使用协议(如TCP或UDP)进行实时数据包交换。电力信息实时仿真平台的优势在于能够模拟考虑通信状况的大型复杂系统,但是,初始设置非常耗时,而且需要多台主机以及实时模拟器才能建立实时仿真平台[16]。
2.1 电力系统仿真
电力系统仿真软件要求能够模拟电力系统实时状态,目前国内外比较流行的主要有加拿大曼尼托巴RTDS公司开发的实时数字仿真器和加拿大OPAL-RT公司开发的实时仿真平台。本文选择的是后者推出的eMEGAsim仿真机以及配套的上位机软件RT-LAB。
eMEGAsim是一款性能强大的实时仿真机,主要用于电力系统,特别是保护与控制系统的开发和测试。eMEGAsim集成了英特尔多核处理器、Matlab/Simulink与SimPowerSystems模型库、精确的解算器和通用的IO卡。作为其上位机软件的RT-LAB能够实现与Matlab/Simulink无缝集成,将其中的模型编译为C代码,并下载到eMEGAsim仿真机中实时运行[17]。
2.2 通信系统仿真
本文选择OPNET Modeler作为通信系统仿真软件。OPNET提供三层建模机制,从进程层到节点层再到网络层,与实际的协议、设备、网络完全对应,能够全面反映网络的相关特性[18]。OPNET具有灵活的高级用户界面,可以访问标准的模块库,还在模拟场景扩展方面支持用户定义的模型,涵盖目前常用的各种通信协议,可以模拟通信延迟、数据丢失、网络攻击等网络状况[19]。
电力系统的不同集群都对应通信系统的一个工作站节点,即物理系统的实际节点都对应通信系统的虚拟节点,通信工作站节点模型可以修改传输协议报文,模拟网络攻击、数据丢包等场景,使得通信环境更接近真实情况。
3 集群分布式协同控制策略及电力信息硬件在环仿真平台开发
3.1 基于一致性的分布式协同控制策略
考虑到不同集群信息错综复杂,集群控制采用群内自治和群间协调相结合的方式[20]。当控制子站检测到群内母线电压波动时,调整本地集群内的分布式电源出力。如果母线电压还是不能恢复正常,说明故障或扰动已经超出本地集群的控制能力,则调整邻近集群内的电源出力直到母线电压恢复正常,整个集群控制框架如图3所示。
群内自治采用基于有限时间一致性的分布式控制策略。各代理之间可以分享各自的信息,获得分布式电源出力的调整指令,该策略能够适应分布式电源即插即用以及电力系统故障引起的通信拓扑变化,满足复杂的集群控制要求,保证了电力信息协调仿真时的灵活。群间协调则由监控中心统一下达指令,在本地集群不足以使得电压恢复正常时,下达指令使得邻近集群与其交互信息,帮助平抑波动。
本文中基于有限时间一致性的分布式控制[21]包括两层控制。其中一次控制选择下垂控制,描述如式(1)。
 (1)
(1)式中:Vi和Pi分别为代理i输出的电压和功率;Vref为其电压参考值;di为下垂系数。
二次控制负责调节系统电压,进行电压校正,各个代理根据本地以及相邻区域的电压信息,通过有限时间一致性算法迭代出系统的平均电压。整个调节过程可以描述为
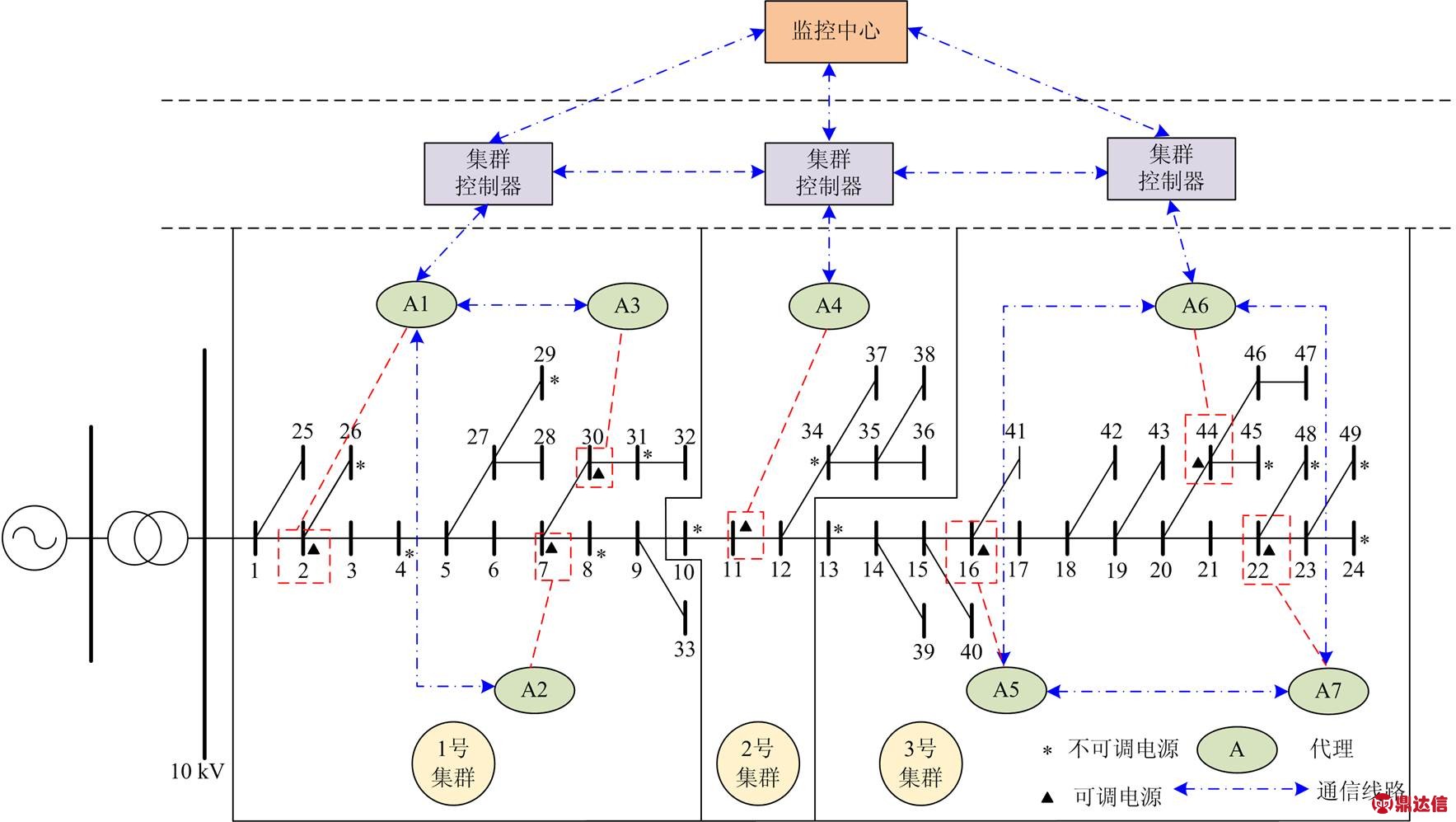
图3 分布式电源集群控制框架
Fig. 3 Distributed power clusters control framework
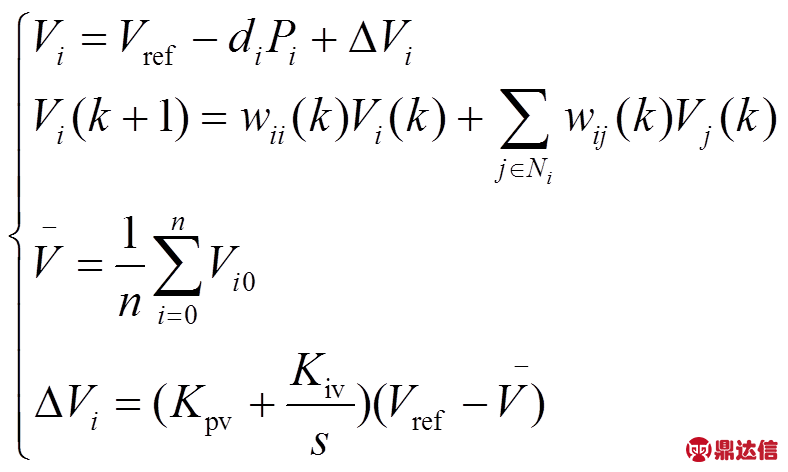 (2)
(2)式中: 为代理i经过k次迭代算出的电压值;
为代理i经过k次迭代算出的电压值; 和
和 为k次迭代时通信拓扑下的耦合因子;Vi0为各个代理的初始电压,平均一致电压经过k次迭代后计算得出;迭代结束后通过PI环节对电压进行修正,Kpv和Kiv为PI环节的控制系数。
为k次迭代时通信拓扑下的耦合因子;Vi0为各个代理的初始电压,平均一致电压经过k次迭代后计算得出;迭代结束后通过PI环节对电压进行修正,Kpv和Kiv为PI环节的控制系数。
3.2 集群控制器硬件开发
分布式电源集群中存在大量的电力电子设备和通信设备,数据非常庞杂,甄别关键状态信息并选择高效的控制方法是需要重点关注的问题。
本平台能够实现二次控制器硬件在环,集群控制器要求能够实现高速的数据传输和复杂的控制算法[22],本文选择TI公司的TMS320F28377DSP芯片为核心器件的控制电路。TMS320F28377是一款功能强大的数字信号处理器,具有高速数据处理能力,同时配备灵活的外围设备和丰富的控制接口,能够满足本平台的需求。
在电力信息实时仿真中,DSP控制电路通过外设接口和OPNET主机相联。DSP接收监测数据,经过一系列的控制算法处理之后,得到控制信号,并返回到通信系统中,实现控制目标。
3.3 电力信息实时仿真平台
整个电力信息实时仿真实物平台如图4所示。平台主要由四部分组成,分别是RT-LAB上位机、OPAL-RT仿真机、OPNET主机以及DSP控制器,不同系统之间都是通过以太网连接。
RT-LAB主机采用UDP/IP协议与通信系统进行数据交互,利用套接字的方式将状态信息发送至通信系统。OPNET主机采用系统在环(System In The Loop, SITL)方式与外部接口进行数据交换,一个SITL模块对应OPNET主机的一块实际网卡,利用SITL能够实现多种二次设备在环。
OPAL-RT主机需要同时与上位机和通信系统仿真主机之间交互数据,所以各仿真主机之间通过网络交换机连接,以处于一个局域网中;DSP控制器通过以太网与通信系统主机相连。
3.4 电力信息仿真流程
针对图4的电力信息实时仿真平台,本文实施的电力信息实时仿真数据传输流程如图5所示。
整个实时仿真平台的数据传输流程如下:
1) OPAL-RT主机将电力网络不同集群的状态信息发送到数据整合模块,整合模块将采集到的数据传递给RT-LAB主机的物理交互接口,物理交互接口再利用套接字的方式通过以太网将数据包发送到通信系统的交互接口;
2) 通信交互接口将收到的数据发送到数据匹配映射模块,将数据包拆分发给对应的通信节点,各通信节点将各自的数据通过以太网传送到DSP控制器的数据交互接口;
3) DSP控制器通过状态变量接收模块收到数据后进行处理,产生控制信号,通过发送模块传输回通信系统中;
4) 通信系统将收到的控制信号发送到数据回调模块,再通过以太网发送到RT-LAB主机的物理交互接口;
5) RT-LAB主机将收到的控制信号通过数据分配模块分配给相应的控制器,完成一次循环。
4 仿真算例
4.1 算例介绍
为验证电力信息实时仿真平台和集群控制方法的有效性,本文选取安徽金寨某电网进行相关仿真验证,选取的母线及其多条支路上共设有公用配变和专用配变29个,依据电压等级和电气距离对该线路线进行集群划分,划分结果已在图3中标出。整条线路共有19个分布式发电单元,其中不可调电源有12个,其节点位置为{4,8,10,13,24,26,29,31,34, 45,48,49},可调电源有7个,节点位置信息为{2,7, 11,16,22,30,44},负荷有29处,节点位置为{3,4,6,8,10,11,13,16,17,21,24,26,28,29,30,31,33,36,37,38,39,40,43,44,45,46,47,48,49}。

图4 电力信息实时仿真实物平台
Fig. 4 Power cyber-physical system real-time simulation platform
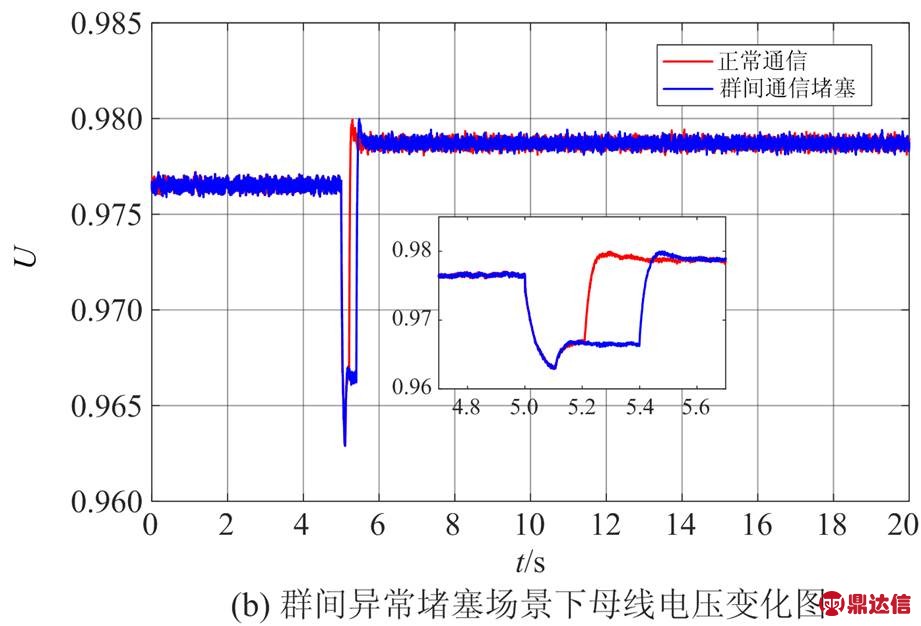
图5 电力信息实时仿真数据传输流程
Fig. 5 Data transmission process of power information real-time simulation
在RT-LAB中搭建电力网络模型,每条母线都配备了三相量测设备,实时监测母线上的电压电流。在一些关键节点设置可调电源,每个可调电源都配备控制器采集本地信息和控制电源出力,同时与外界交互信息。在36号和47号母线处设置可调负荷。
4.2 算例结果
结合上述仿真模型,本文利用电力信息实时仿真平台验证集群控制策略的有效性,并测试不同的通信状况对控制效果的差异,评估通信系统对电力系统安全运行的影响。
4.2.1群内自治
为验证群内自治控制效果,在5 s时47号母线上的负荷出现波动,观察3号集群内母线电压变化情况。同时在OPNET中设置不同的通信场景,研究通信堵塞、通信设备断线、通信误码场景下控制效果的差异。
本文通信线路均选用10 Mbit/s光纤以太网。为模拟通信系统不同堵塞程度,在OPNET中设置几种不同的通信环境:① 正常通信环境:通信网络正常运行,数据流量只有来自电力系统和控制器的信息,数据到达控制子站和路由器都不需要排队;② 通信一般堵塞:通信网络中除了来自集群算例的数据,还用背景流量模拟其他数据,实验数据到达控制子站和路由器需要排队一定时间;③ 通信异常堵塞:通信网络发生故障(受到网络攻击或者设备异常),实验数据无法正常到达控制子站或者需要排队较长时间。三种不同的通信拥堵程序下20号母线电压变化情况如图6(a)所示,群内可调电源逆变器控制器的动作时间和母线最低电压对比如表1所示。本文中电压均用标幺值表示。
此外,为研究通信设备断线对仿真结果的影响,正常通信环境下,在5 s时设置其中一个可调电源的通信线路断线,该通信环境下20号母线电压变化如图6(b)所示。模拟通信误码时,在3 s时集群控制器下达了错误的控制指令,导致其中一个可调电源的出力偏离设定值,仿真结果如图6(c)所示。
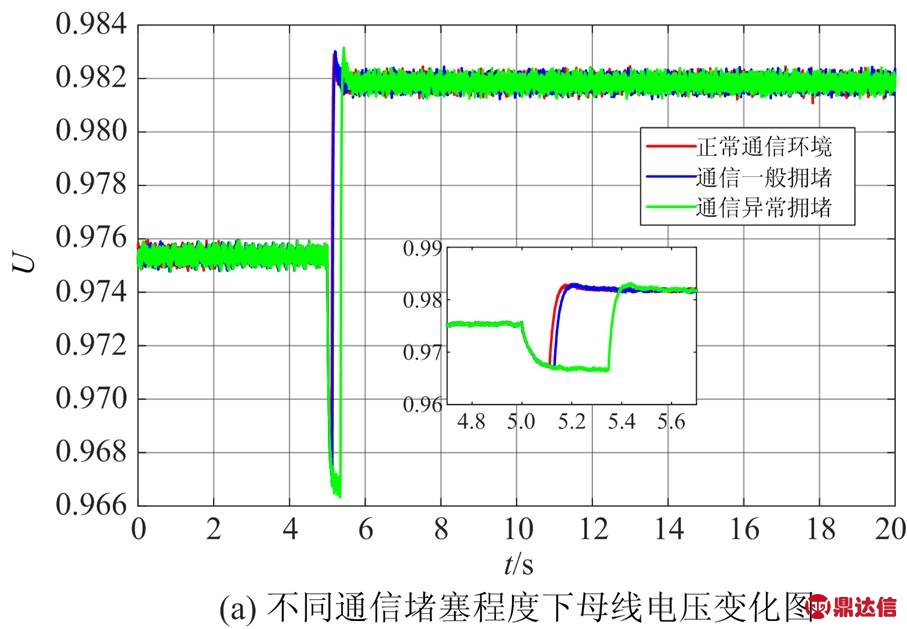
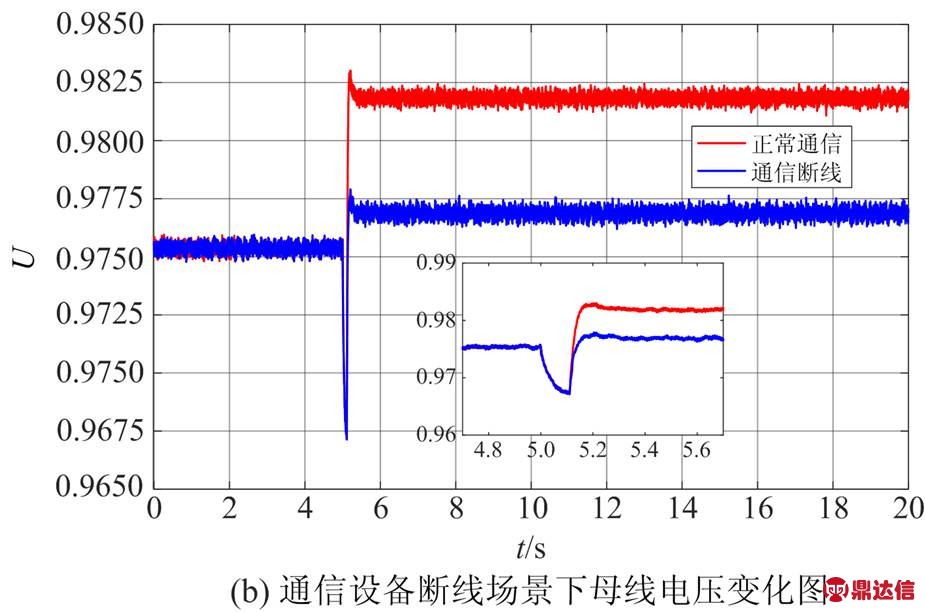
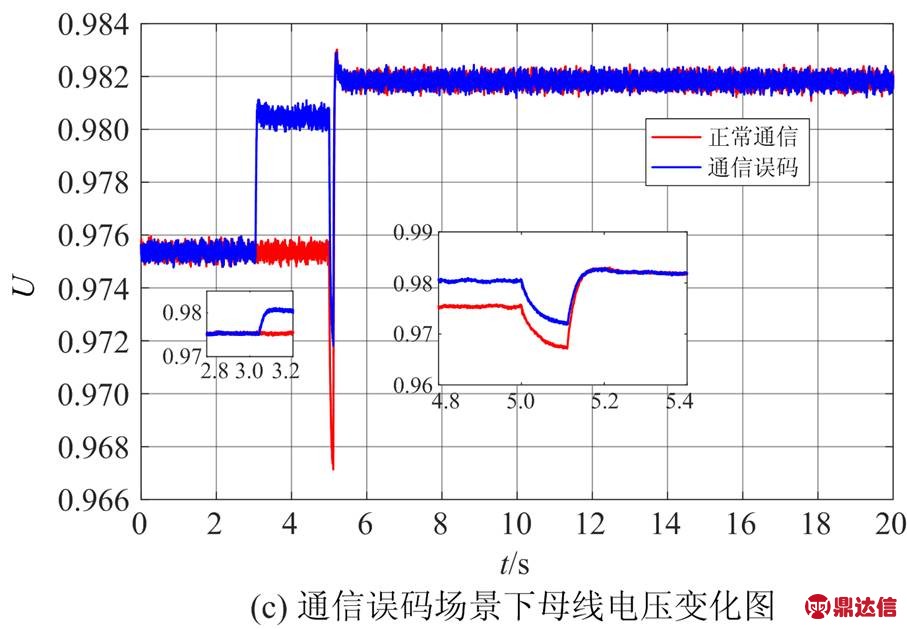
图6 群内自治仿真结果
Fig. 6 Simulation results of intra-group autonomy case
表1 群内自治不同通信环境下控制器动作时间
Table 1 Controller operating time in different communication environments in intra-group autonomy case
观察图6(a)和表1结果,可以看出不同的通信堵塞程度会对控制效果有着显著影响。在正常通信环境下,数据没有排队延时,控制器只需要0.11 s就可以动作,而在一般堵塞的环境下,光纤以太网中,控制器动作略有延迟,达到了0.13 s,由于其他数据量占以太网带宽的比例并不大,所以造成的延迟较小,两种通信环境下母线的最低电压也很接近。但是当通信网络因为故障而异常堵塞时,动作时间明显增大到0.35 s,母线最低电压也相应有所下降。堵塞更加严重时,控制器可能会接收不到控制信号,这将严重危害电力系统的安全稳定运行。
由图6(b)可以看出,通信设备断线时,某个备用电源将无法收到控制信号,不能投入,导致稳定后的母线电压低于正常水平。而图6(c)的结果显示,3 s时的通信误码导致其中一个可调电源误动,将母线电压抬升,5 s时发生负荷波动后电压变化趋势与正常通信环境一致。本文验证的通信设备断线和通信误码场景较为简单,没有造成严重的后果。实际电网运行时,备用电源误动或不动都会影响到电力系统的安全,发生严重的故障时,通信问题可能会直接导致系统崩溃。
4.2.2群间协调
为验证群间协调控制效果,在5 s时36号母线上的负荷出现波动,2号集群内的可调电源会调整出力抬升母线电压。但是由于2号集群规模较小,群内电源容量不足以将电源抬升到正常水平,此时集群控制器与邻近集群交互信息,根据一致性算法调整邻近集群内的电源出力。在OPNET中设置不同的通信场景,观察在不同的通信状况下控制效果的差异。
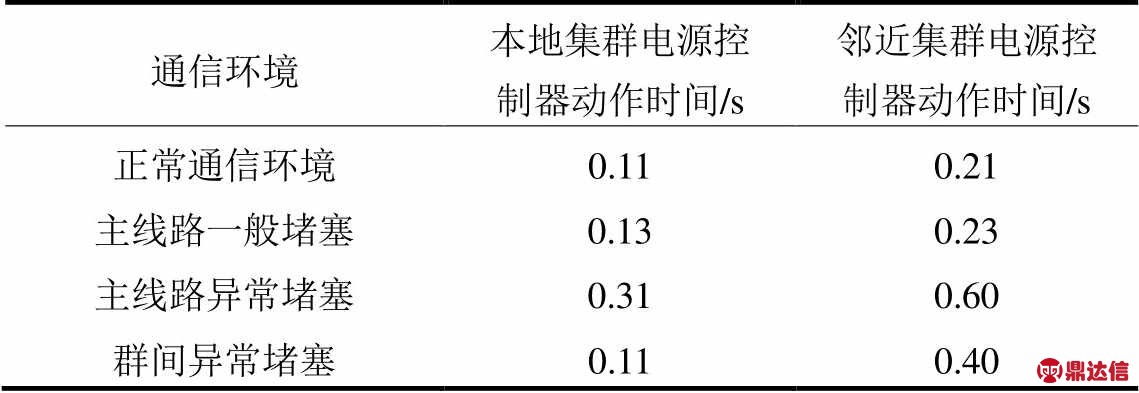
在研究通信堵塞程度对控制效果的影响时,本文分别模拟了主线路通信堵塞和群间通信堵塞,具体设置了如下几种通信环境:① 正常通信环境,设置同群间自治场景;② 主线路一般堵塞,通信网络主线路中除了来自集群算例的数据,还用背景流量模拟其他数据;③ 主线路异常堵塞,通信网络主线路发生故障;④ 群间通信异常堵塞,群间通信线路发生故障。主线路不同通信堵塞程度下,12号母线电压变化情况如图7(a)所示,群间通信异常堵塞的仿真结果如图7(b)所示,上述4种不同通信环境下控制效果的差异如表2所示。此外,为研究通信误码对群间协调控制的影响,在正常通信环境下,5 s时3号集群控制子站下达的指令有误,群内的一个可调电源出力偏离设定值,仿真结果如图7(c)所示。
综合观察图7(a)、图7(b)和表2的仿真结果,可以发现不同线路的不同堵塞程度对控制效果会产生不同的影响。主线路上发生通信堵塞会影响整个控制过程,主线路一般堵塞时,本地集群和邻近集群电源控制器动作时间相比正常通信环境均略有增加,延迟较小。但是在主线路异常堵塞时,两次动作时间都大幅增大,分别达到了0.31 s和0.60 s,严重威胁电网的安全。而图7(c)的仿真显示,群间异常堵塞时,由于主线路未受干扰,本地集群内的电源控制器正常动作,动作时间和正常通信环境下一致,但是邻近集群内的电源控制器延迟非常明显,相比正常时延迟了0.19 s。可见通信堵塞是电力系统需要密切关注的一个问题,任何一条线路堵塞都可能导致控制失灵。由图7(c)可以看出,5 s时发生的通信误码导致邻近集群的电源未能正常改变出力,系统稳定之后母线电压低于正常水平。
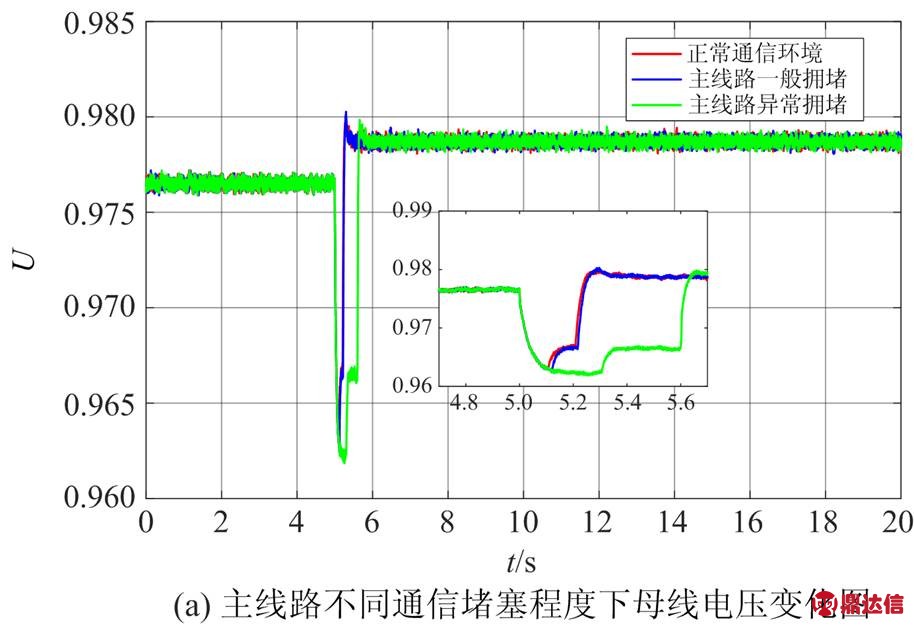
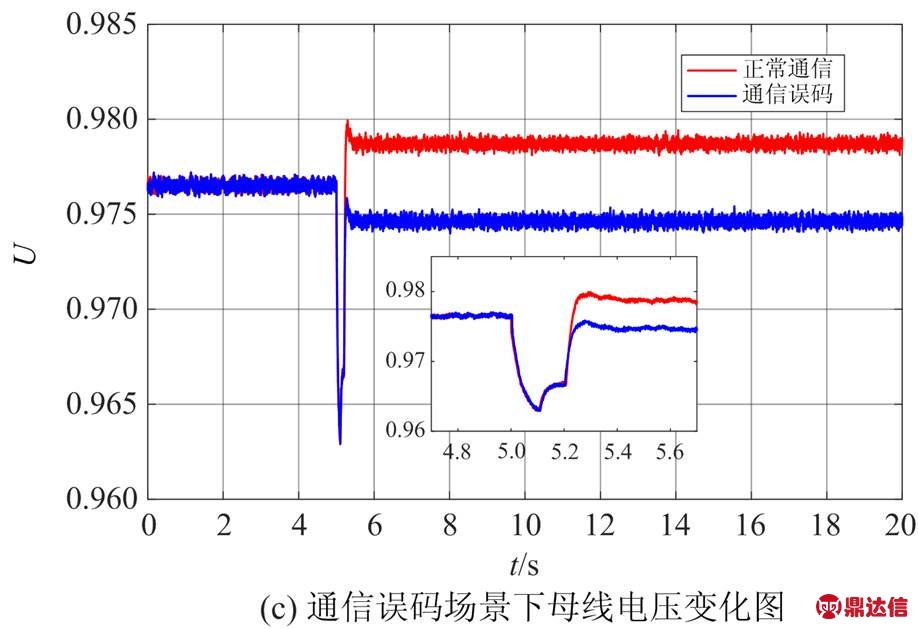
图7 群间协调仿真结果
Fig. 7 Simulation results of intergroup coordination case
表2 群间协调不同通信环境下控制器动作时间
Table 2 Controller operating time in different communication environments in intergroup coordination case
基于上述群内自治和群间协调的仿真结果,可以发现通信系统状况直接关系到控制效果,而本仿真平台能够准确模拟各种不同的通信场景,体现通信系统对集群控制的影响。
5 结语
本文搭建了一种基于RT-LAB和OPNET的电力信息实时仿真平台,实现了控制器硬件在环,研究分布式电源集群问题,验证了不同通信状况下群内自治和群间系统控制策略,克服了实物系统受现实条件的限制,并证明了本仿真平台的准确性和有效性。
为进一步提高电力信息实时仿真平台的仿真能力,还需要开展以下工作:
1) 基于电网实际通信网络,完善电力通信网络模型,丰富通信仿真场景;
2) 构建统一交互接口,扩展实时仿真平台功能,实现多种硬件终端在环;
3) 深入研究分布式电源集群控制策略,将更多策略应用到电力CPS系统中。


