
摘要 提出一种正负高频脉冲电压注入的永磁同步电机无位置传感器控制方法;研究基于旋转坐标系下电流响应的单锁相环角位置信息提取方式,简化算法结构;提出在不中断的高频注入电压信号上叠加直流电压偏置的方法,通过电流振荡幅值实现磁极方向准确判断。400W永磁电机系统上的实验结果验证了所提方法的有效性。
关键词:永磁同步电机 无传感器控制 高频脉冲电压注入 磁极检测
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有效率高、转矩密度大等特点,已经成为许多工业领域应用的最佳选择,尤其在先进制造和电力驱动领域具有巨大的发展潜力[1]。
永磁同步电机中高速段常采用反电动势法进行转子位置估算[2]。在零速和低速段,由于反电动势幅值小,通常采用高频注入的方法,基于电机的结构凸极效应或者饱和凸极效应观测转子位置[3-4]。可以在两相静止坐标系中注入高频旋转电压,从高频电流响应的负序分量中提取位置信息[5-6],这种方法需要电机本身具有结构凸极性;也可以在估计的旋转坐标系中注入高频电压信号,这种方法利用了电机的饱和凸极性,可以应用于表贴式永磁同步电 机[7-8]。这两种方法在位置估计时需要使用滤波环节提取高频电流响应,使用滤波器将增加无传感器控制器的复杂性。文献[9]采用了方波注入的方法来获取转子的位置。方波注入法能在相同的载波频率下,实现更高信号频率的注入,从而能够拓展速度环带宽。一般的方波电压注入法在提取基波电流时需要低通滤波,这仍然会影响到转子位置估算的准确度。文献[10]提出了一种将磁场定向控制(Field Oriented Control, FOC)周期与电压注入周期分离的方波注入方法,该方法通过向d轴依次注入幅值相等、方向相反的两个电压矢量来抑制逆变器非线性因素对转子观测器的影响。
高频注入法能有效观测转子位置,却不能实现磁极极性辨识,如果磁极极性错误,那么电机带载能力会受到限制,甚至会导致起动失败,所以需要进行转子磁极极性判断[11]。磁极极性判断常用的方法有瞬态短脉冲注入法和交叉饱和效应引起的二次谐波法[12]。文献[13]采用的方法是向估计的d轴注入正负测试脉冲电压,利用不同磁极下电流从稳态值衰减到零的时间不等,判断磁极正方向。该方法鲁棒性较强,然而在极性识别过程中要停止位置估计,在软件算法实现的过程中,会额外增加算法状态机的切换任务,使代码的结构更为复杂。文献[14]采用在每个PWM周期的零时刻测量电流的差值来判断磁极极性。其优势在于无需额外注入电压,收敛速度快,这种方法的缺点在于位置估算依赖电流的精度,一旦电流信噪比偏小,将无法准确获取转子位置。
本文提出了一种正负高频脉冲电压注入永磁同步电机无位置传感器控制方法,研究了基于旋转坐标系下电流响应的单相锁相环角位置信息提取方式。基于磁饱和效应提出了改进的磁极方向判别策略:通过施加两段方向相反的d轴直流偏置电压,比较d轴高频电流响应的振荡幅值大小实现转子的磁极方向辨识。最后通过实验对上述方法进行验证。
1 正负高频脉冲电压注入法
在dq坐标系下,永磁同步电机的方程可以等效为
 (1)
(1)
式中,ud、uq为定子电压在d、q轴上的分量;id、iq为定子电流在d、q轴上的分量;Ld、Lq是三相绕组电感在旋转坐标系下d、q轴等效电感;R是定子电阻;wr是转速;lmpm是永磁体磁链。这个方程是实际的dq坐标系的电压方程,无法直接用于位置估计,因此需要将它转换到估计的旋转坐标系或者ab 静止坐标系下。
永磁同步电机运行在零速或低速段,由于转速近似为零,和wr有关的乘积项可以略去。所以,将电压和电流变换到静止坐标系后,可得
 (2)
(2)
式中,ua、ub 为定子电压在a、b轴上的分量;Ia、Ib 为定子电压在a、b 轴上的分量;qr为dq坐标系超前ab 坐标系的角度值;L1=(Ld+Lq)/2,L2=(Ld-Lq)/2。
将式(2)中的电压、电流分量用欧拉变换分别合成为一个电压向量后,电机模型方程为
 (3)
(3)
式中, 是静止坐标系下的电压矢量;
是静止坐标系下的电压矢量; 是静止坐标系下的电流矢量;
是静止坐标系下的电流矢量; 是的共轭矢量。
是的共轭矢量。
永磁同步电机在高频信号注入下,电压矢量的幅值满足
 (4)
(4)
此时可以忽略定子电阻上产生的电压,那么式(3)可以近似等效为
 (5)
(5)
进一步变换为
 (6)
(6)
式中, 是的共轭矢量。在一个开关周期内,等效为
是的共轭矢量。在一个开关周期内,等效为 ,因此,电流变化量可以表示为
,因此,电流变化量可以表示为
 (7)
(7)
式中, ,
, ;qu为静止坐标系下电压矢量的角度,电压矢量
;qu为静止坐标系下电压矢量的角度,电压矢量 ,且
,且 ,各坐标相对关系以及角度定义如图1所示。
,各坐标相对关系以及角度定义如图1所示。
估算位置角变量 为ab 静止坐标系和
为ab 静止坐标系和 估计旋转坐标系的夹角。将式(7)转换到估计旋转坐标系下,即
估计旋转坐标系的夹角。将式(7)转换到估计旋转坐标系下,即
 (8)
(8)
从图1可知
(9)
式中, 为实际旋转坐标系和估计坐标系的误差角度;
为实际旋转坐标系和估计坐标系的误差角度; 为电压矢量在估计旋转坐标系下的角度,所以式(8)可以转换为
为电压矢量在估计旋转坐标系下的角度,所以式(8)可以转换为
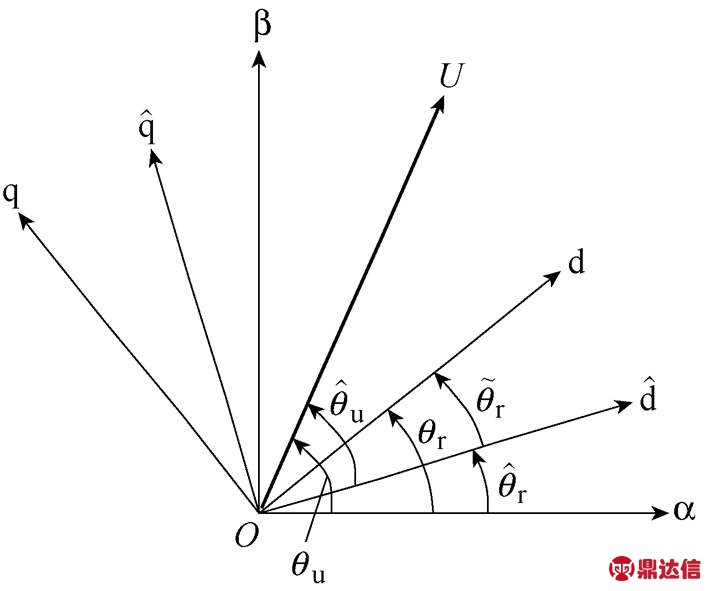
图1 各坐标相对关系以及角度定义
Fig.1 Relative coordinate relationship and angle definition
 (10)
(10)
可以向 轴依次注入幅值相等且方向相反的两个电压矢量来减小逆变器非线性带来的电压误 差[10],方法如下:取三个PWM周期当作一个完整的控制周期,在第一个PWM周期时,只有FOC控制矢量,不叠加任何高频矢量,该FOC矢量产生的电流响应作为三个PWM周期电流环的反馈电流;在第二个PWM周期时,在轴给定正向高频矢量;在第三个PWM周期时,在轴给定负向高频矢量。再通过第二个、第三个PWM周期获取的电流与前一PWM周期获取的电流作差,得到两次变化的电流。
轴依次注入幅值相等且方向相反的两个电压矢量来减小逆变器非线性带来的电压误 差[10],方法如下:取三个PWM周期当作一个完整的控制周期,在第一个PWM周期时,只有FOC控制矢量,不叠加任何高频矢量,该FOC矢量产生的电流响应作为三个PWM周期电流环的反馈电流;在第二个PWM周期时,在轴给定正向高频矢量;在第三个PWM周期时,在轴给定负向高频矢量。再通过第二个、第三个PWM周期获取的电流与前一PWM周期获取的电流作差,得到两次变化的电流。
例如:在第一个注入周期内,在轴注入电压矢量Umejp/2。然后在第二个注入周期内,在轴注入的电压矢量为注入Ume-jp/2。如果用 表示逆变器非线性产生的电压误差,那么实际注入到电机的电压信号可以表示为
表示逆变器非线性产生的电压误差,那么实际注入到电机的电压信号可以表示为
 (11)
(11)
式中,两个注入矢量分别对应两个注入周期,通过式(10)可以得出两次注入信号的电流响应为
 (12)
(12)
各个矢量的关系如图2所示,其中
(13)
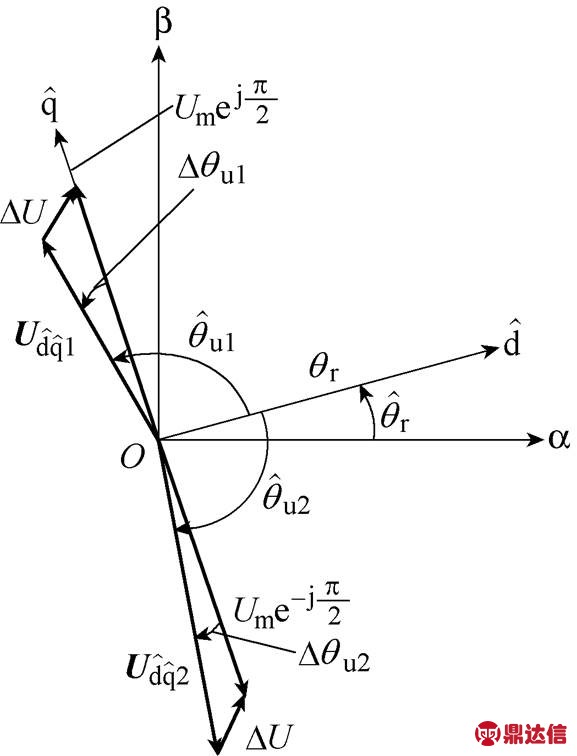
图2 注入矢量示意图
Fig.2 Schematic of injection vector
由式(13)可以推导出
(14)
由式(14)可以看出逆变器非线性的影响被抵消了,又 接近于0,当误差角度很小时,式(14)可以近似等效为
接近于0,当误差角度很小时,式(14)可以近似等效为
 (15)
(15)
式中, 。
。
同样地,如果连续两个周期在估计 轴注入方向相反的信号,同样能估算出角度位置为
轴注入方向相反的信号,同样能估算出角度位置为
 (16)
(16)
2 单相锁相环的转子位置估算
在得到了实际旋转坐标系和估计坐标系的误差角度后,估算角度以及估算速度可以通过一个单相锁相环(Phase Locked Loop, PLL)控制器获取,带有锁相环控制结构,如图3所示。锁相环内部的结构如图4所示。图中,Kei是积分系数,Kep是比例系数。
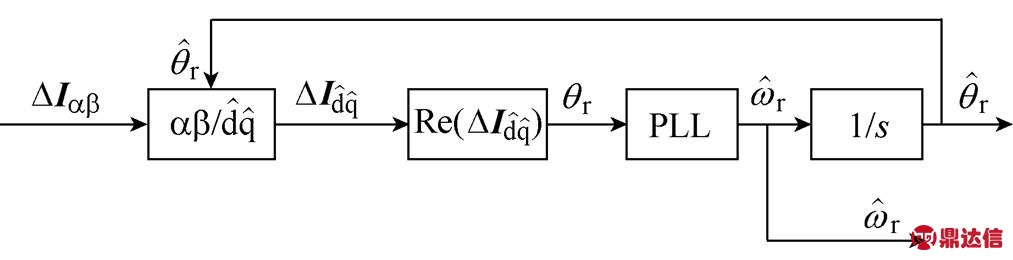
图3 位置角解算基本框图
Fig.3 Block diagram of angle solution
单相锁相环简单易行,稳定性强,易于算法实现[15]。在实际的控制器中,锁相环独立于转速-电流双闭环结构,位于角度观测器中。所以,在程序代码内,可以进行多次循环计算,以达到稳定快速锁出准确位置角的目的。
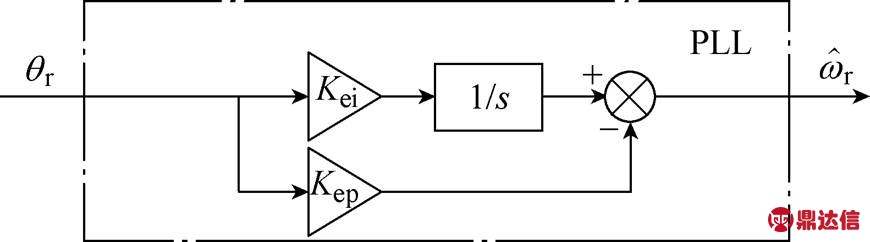
图4 锁相环控制器基本框图
Fig.4 Block diagram of PLL controller
3 磁极正方向判断
由式(3)可见,获取的位置角是实际转子位置角的2倍。高频脉冲电压注入法仅能够实现转子的位置估算,但无法实现转子磁极极性的判别。当估算角与实际角相差180°时,转子位置观测器依然收敛[13,16]。
在使用短脉冲注入法进行磁极方向判别时,需要中断位置估计,在软件算法实现的过程中,会额外增加算法状态机的切换任务,会使代码的结构更为复杂。
本文在此前提下提出一种改进的初始位置辨识方法,该方案在脉冲方波注入完成转子位置辨识后,在不中断方波注入的基础上,仅增加给定的d轴偏置电压Ubias,以及改变此偏置电压的方向,通过比较d轴高频电流响应振荡幅值大小完成磁极辨识,实现较为简单。
图5为d轴磁路饱和特性曲线[11,17],图中ifh为d轴注入高频电压信号后产生的感应电流,X1和X2增量电感L1和L2可以定义为
 (17)
(17)
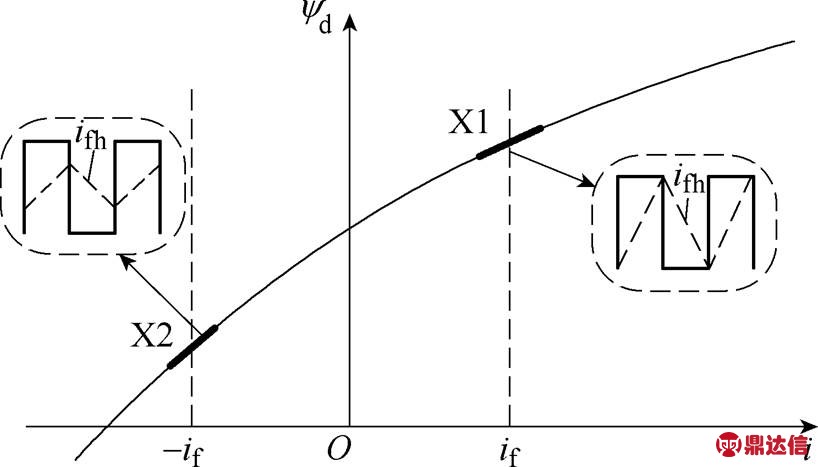
图5 直轴磁路特性曲线及高频电流响应
Fig.5 Magnetic circuit characteristics and high-frequency current response of direct-axis
由图5可见,当d轴直流偏置电压与转子磁极极性相同时(X1),定子磁通饱和度增强,增量电感减小,d轴高频响应电流幅值增大;当d轴直流偏置电压与转子磁极极性相反时(X2),定子磁通饱和程度减弱,增量电感增大,d轴高频响应电流幅值减小。因此,只需比较正负d轴电压偏置给定下的高频电压产生的高频电流响应的振荡幅值大小即可实现转子磁极极性辨识。
若当正向高频电流振荡幅值大于反向高频电流振荡幅值时,则估算的位置角方向指向N极,即为转子的位置角;若正向高频电流振荡幅值小于反向高频电流振荡幅值时,则估算的位置角方向指向S极,即转子位置角需要补偿180°。此外,在给定±Ubias的中间时间段,需要令Ubias为零,使基波电流恢复初始状态。
正负高频脉冲电压注入法控制框图如图6所示。图中,uinj为高频注入电压;电压为间歇注入,并且获得的静止坐标系的电流也间歇地用于坐标变换或转子位置估算。
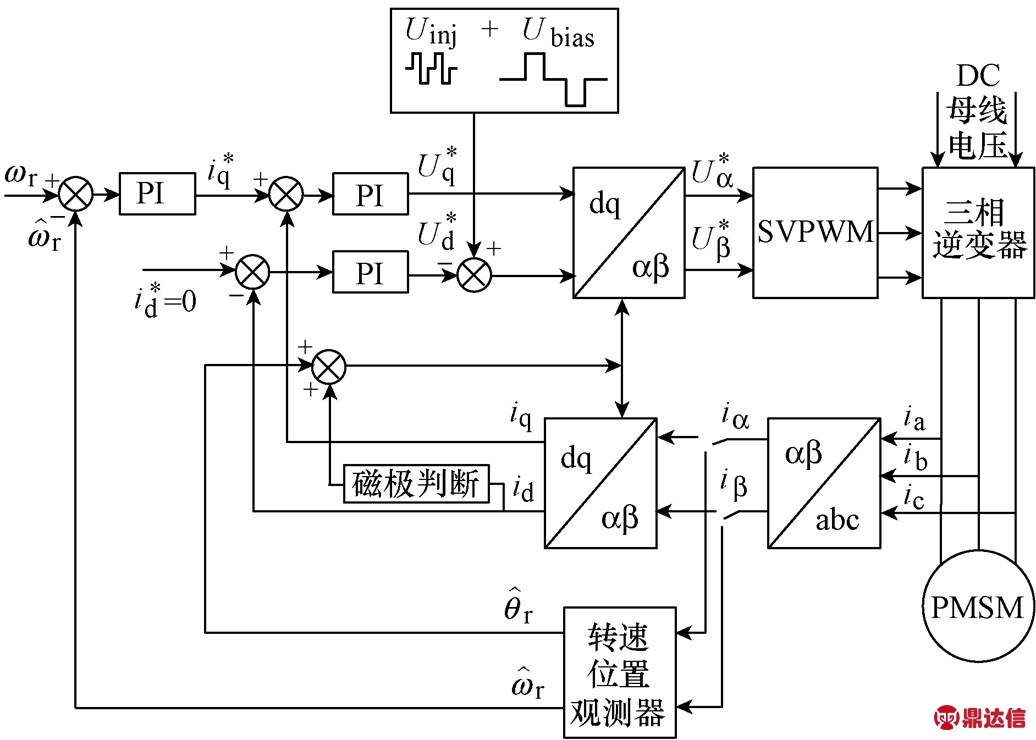
图6 正负高频脉冲电压注入法控制框图
Fig.6 Block diagram of positive and negative high frequency pulse voltage injection method
4 实验结果分析
为验证正负高频脉冲电压注入法转子位置辨识方法的有效性,本文在400W的内置式永磁同步电机上进行实验。永磁同步电机参数见表1。用英飞凌XMC4500芯片实现控制算法,通过增量式编码器对转子实际位置和转速进行检测,用于与观测值比较。
图7是采用正负高频脉冲电压注入法初始位置检测的实验结果。图7a为磁极位置收敛到30°的实验结果;由图7b可见,当转子位置固定在30°时,沿估计的N轴正方向通入16V正向偏置电压,电流振荡幅值比通入16V负向直流偏置电压得到的电流振荡幅值大,所以估计的N轴正方向与实际N轴正方向一致,无需补偿180°;图7c显示了转子位置收敛到120°时的实验结果;由图7d可以看出,当转子位置固定在120°时,沿估计的N轴正方向通入16V正向直流偏置电压,电流振荡的幅值比通入16V负向直流偏置电压得到的电流振荡幅值小,所以估计的N轴正方向与实际的N轴正方向相反,需要在磁极位置初判值上补偿180°。
表1 电机参数
Tab.1 Motor parameters
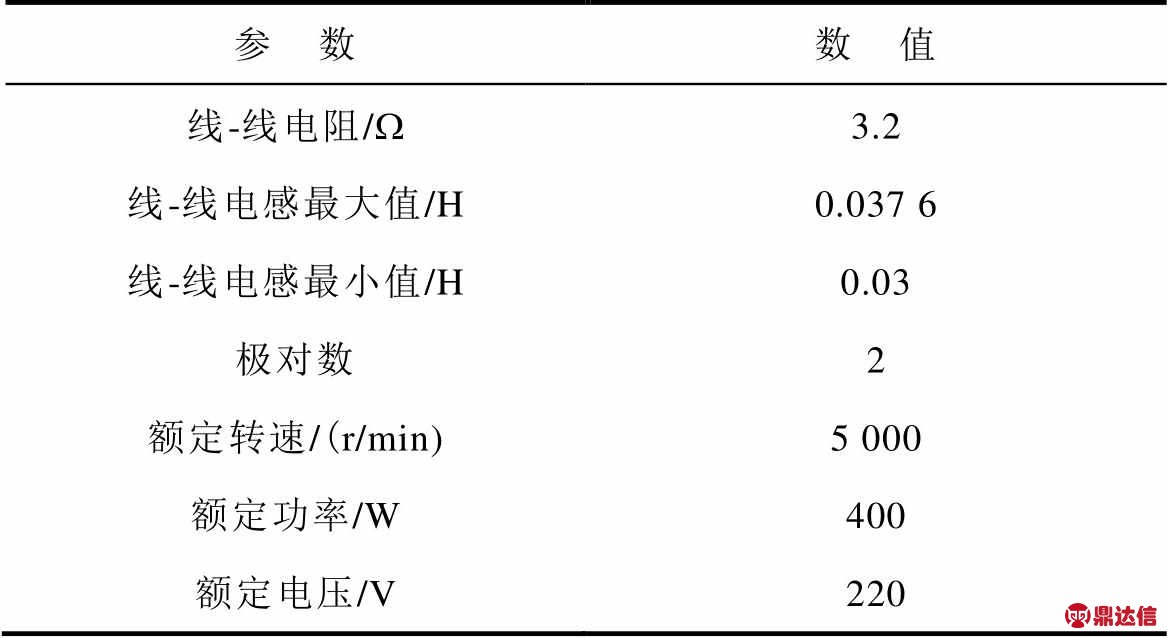
表2为基于正向高频脉冲电压注入法和正负高频脉冲电压注入法的电机转子初始位置估算对比,其初始位置角度预先固定在30°、60°、120°和 150°。表2中,时间为从估算的初始位置收敛到设定位置的时间;误差为估算脉动误差与偏置误差求和。可以看出,正负高频脉冲电压注入法估算时间比正向高频脉冲电压注入法稍慢,估算脉动误差相近,但偏置误差小很多,估算精度比正向高频脉冲电压注入法高。
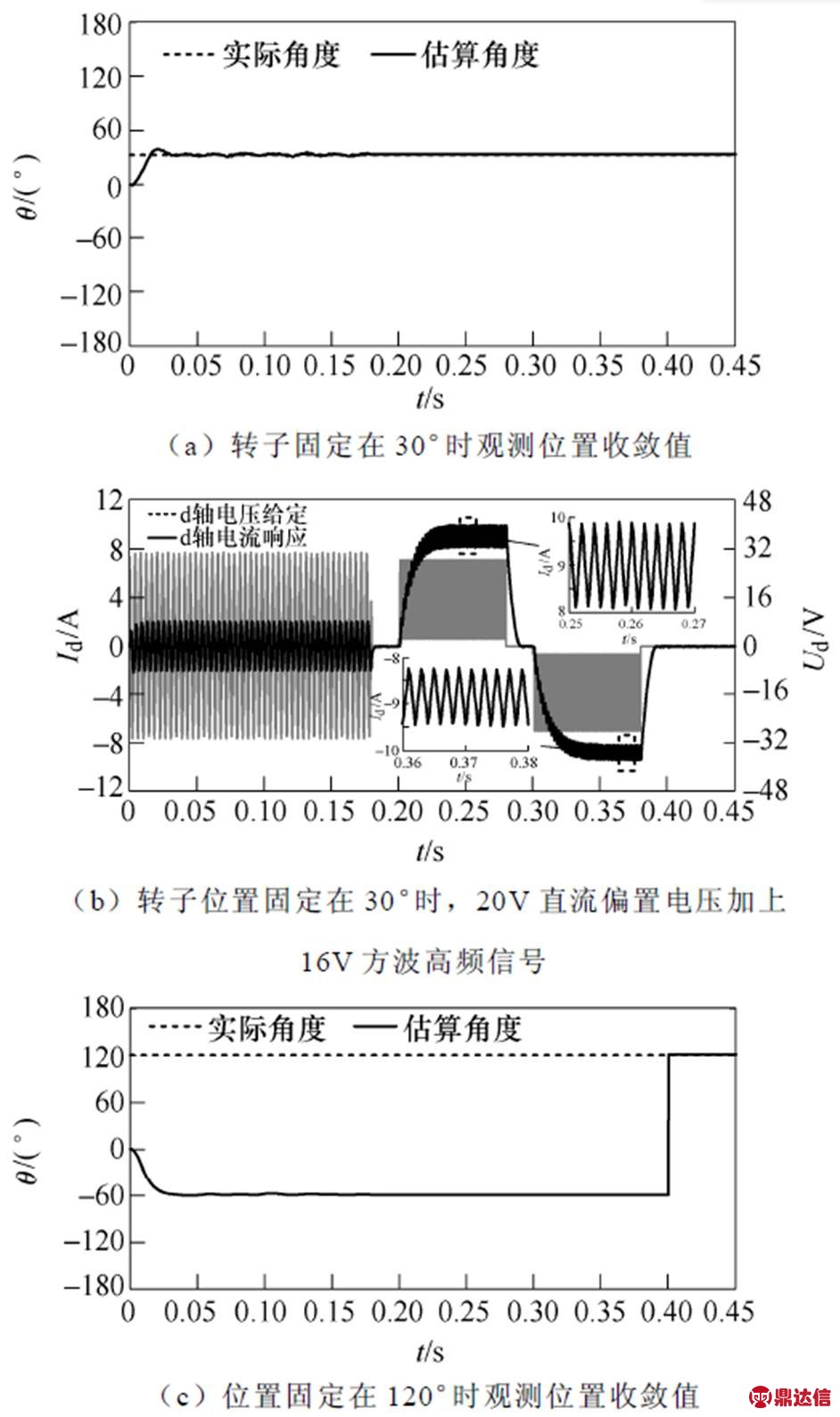
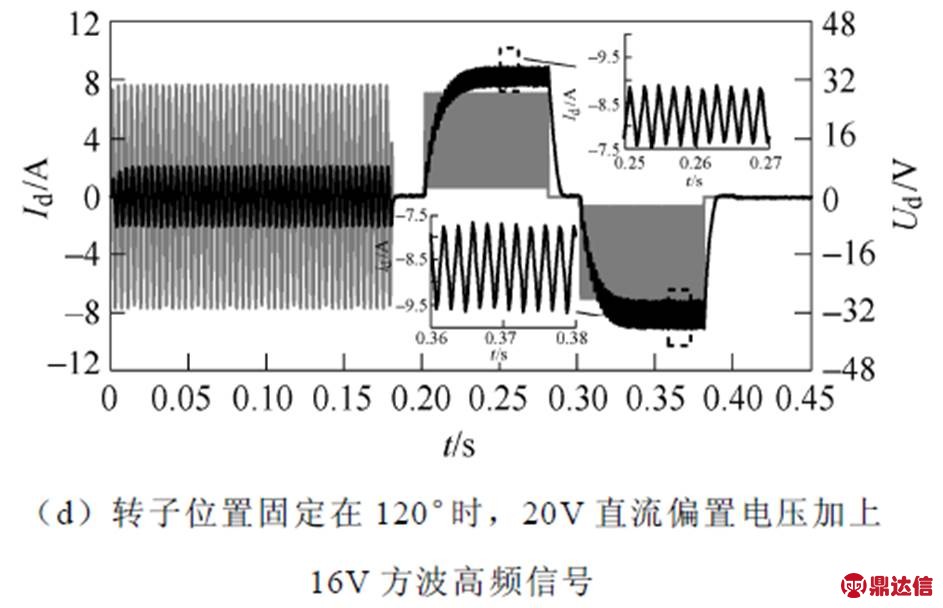
图7 初始位置检测
Fig.7 Initial position detection
表2 不同注入方式初始位置估算对比
Tab.2 Comparison of initial position estimation of different injection methods
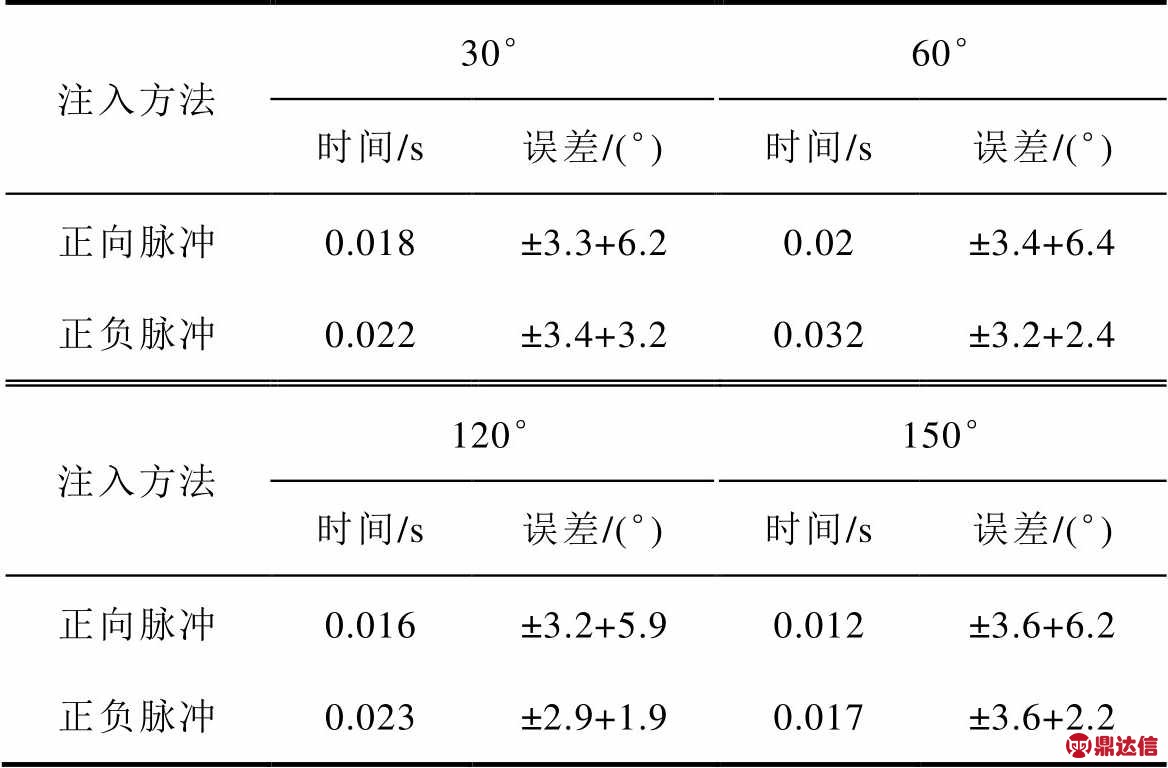
图8为正向高频脉冲电压注入法和正负高频脉冲电压注入法在低速运行实验中的对比效果。受逆变器非线性影响,图8a中正向脉冲信号注入有5°的偏置误差和7°的估算脉动误差;图8b中正负脉冲信号的注入消除了直流偏置误差,估算脉动误差小于5°。可见,正负高频脉冲注入法能够有效消除逆变器非线性带来的估算误差。
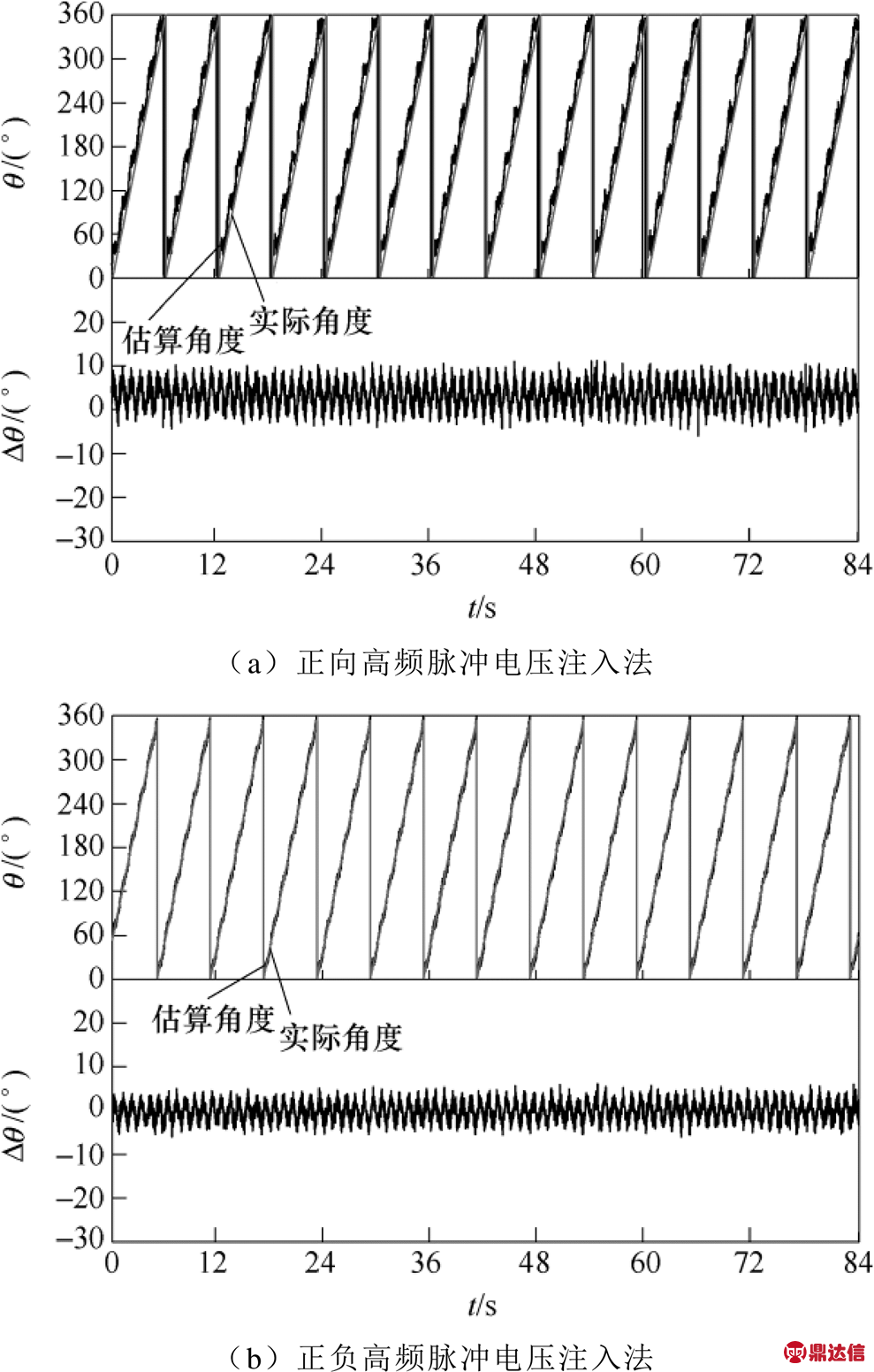
图8 高频脉冲电压注入法实验波形
Fig.8 High frequency pulse voltage injection experiment waveforms
图9为使用正负高频脉冲电压注入法,在转子转向改变时的实验波形,图9a为电机从5r/min切换到-5r/min,图9b为电机从-5r/min切换到5r/min,由实验结果可以看出,估算角度误差能稳定在8°以内。
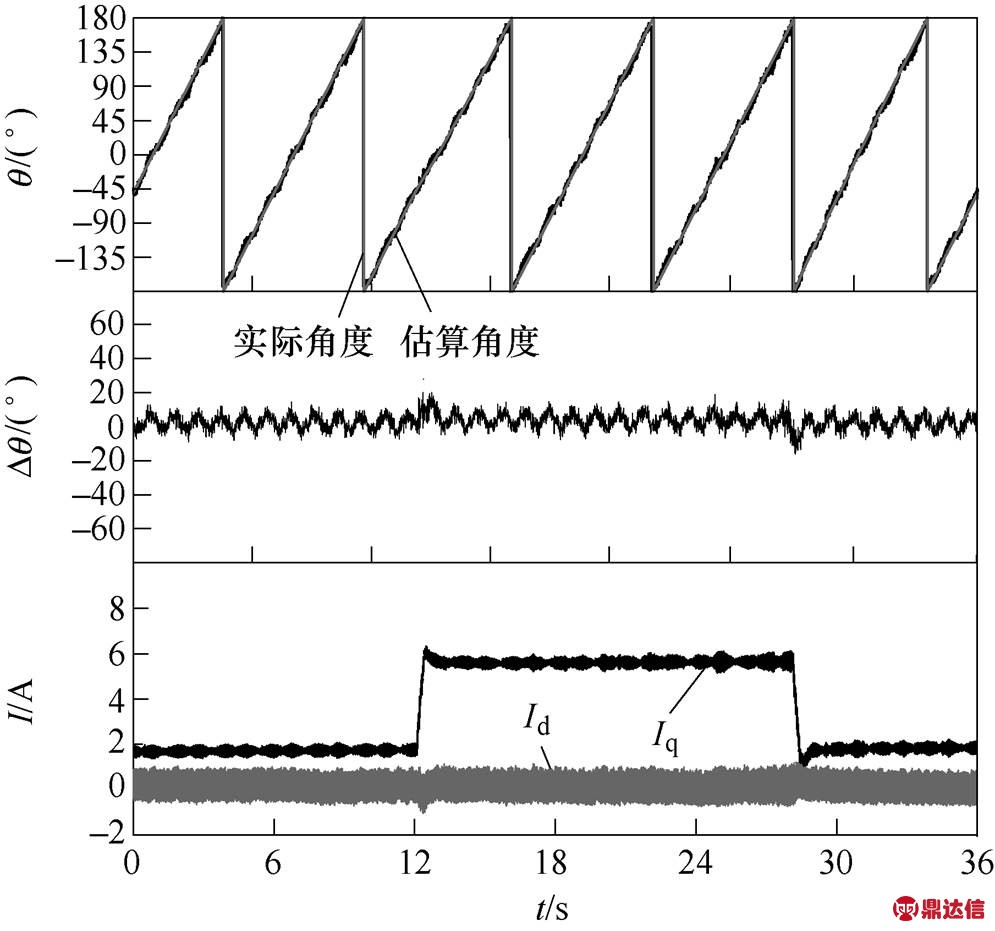
图9 正负高频脉冲电压注入法下转向改变时位置估算波形
Fig.9 Waveforms of position estimation when the direction of rotation is changed using positive and negative high frequency pulse voltage signal injection
图10为正负高频脉冲电压注入法加减负载的实验结果。实验运行的速度为5r/min,给电机突加/突减0.5N·m的负载转矩。当负载发生转矩突变时,转子动态估算依然可以收敛,估算角度能准确跟随实际角度。
图10 低速运行时转矩突变对转子估算的影响
Fig.10 Influence of torque mutation on rotor estimation at low speed operation
5 结论
本文提出了一种正负高频脉冲电压注入永磁同步电机无位置传感器控制方法,研究了基于旋转坐标系下电流响应的单锁相环角位置信息提取方式。基于磁饱和效应提出了改进的磁极方向判别策略。
实验表明,正负高频脉冲电压注入法在初始位置检测阶段,估算精度更优;在低速运行阶段,能有效消除逆变器非线性带来的影响,减小了偏置误差,角度估计更加准确;在转向突变时能有效收敛于实际角度;在突加、突减负载两种工况下,能跟随实际角度,具有良好的动态性能。


