
【摘要】为提升电子皮肤的触觉感知灵敏度,提出一种基于球曲面极板的电容式柔性触觉传感器。介绍了电容式柔性触觉传感器的结构特点与制备流程,并结合理论计算与ANSYS有限元仿真阐述其触觉感知机理,空间立体排布的球曲面感应极板和差分式结构特点可协同提升电容式柔性触觉传感器感知灵敏度。基于高性能电容数字转换器AD7147-1和STM32微处理器搭建容性触觉信号采集与处理系统,完成了电容式触觉传感器特性测试及应用研究。实验结果表明,该传感器可实现法向力与切向力的高灵敏检测和稳定性,动态响应时间约为70 ms,进一步论证了其用作电子皮肤的可行性。
关 键 词 电容式; 电子皮肤; 柔性; 触觉传感器; 球曲面极板
触觉作为人体重要的感官之一,是感知外部环境信息、与外界信息进行交互的主要媒介[1-3]。近年来,电子皮肤(e-skin)基于力学敏感材料模拟人体皮肤在触觉感知方面的优异功能得到了广泛关注,通过重塑触觉感知功能在可穿戴电子、软体机器人、医疗健康、虚拟现实和人工智能等领域展现出重要的应用价值[4-8]。传统的硅基、金属应变片式触觉传感器用作电子皮肤时在柔性、延展性及穿戴舒适性等方面存在弊端,为模仿人体皮肤的触觉感知特性,具备柔性、可拉伸、高灵敏度等特点的触觉传感器成为国内外电子皮肤的研究热点。
随着智能材料与制备工艺的不断发展,旋涂成膜、微流体成型、层层组装、浸渍包覆、3D打印等技术被广泛应用于柔性电子学领域,如柔性天线[9-12]、柔性电子皮肤[13-15]、柔性电极[16]等。柔性触觉传感器按敏感机理可分为电阻式、压电式、光电式和电容式等几类[17-18],其中,电容式柔性触觉传感器因具备优良的动态响应特性和检测灵敏度在电子皮肤研究中得到了广泛应用[19-20]。
设计具有微结构特点的复合介质层是提升电容式柔性触觉传感器灵敏度的常用方法,文献[21]通过在纸基表面依次制备柔性电极和表面粗糙状弹性介质层,并通过层层组装工艺提出了一种高灵敏度电容式柔性触觉传感器。文献[22]基于荷叶疏水特性,以荷叶表面固有的微结构为模板制备复合介质层电容式柔性触觉传感器,可实现高灵敏(0.815 k×Pa-1)和快速(~38 ms)触觉感知。制备微结构复合介质层通常需要繁琐的工艺且多应用于类平行板结构的电容式柔性触觉传感器研究中,可实现高灵敏度法向力感知,然而不具备切向力检测能力或灵敏度较低。为此,研发具有高灵敏度法向力和切向力触觉感知功能的电容式柔性触觉传感器仍是电子皮肤研究所面临的问题之一。
本文通过在半球型柔性腔体内壁等分设置4个呈空间立体排布的球曲面感应极板,与底部柔性公共极板组成电容柔性触觉传感器,并构成差分式结构,相比于传统类平行板结构的电容柔性触觉传感器,呈空间立体排布的球曲面感应极板和差分式结构特点更有利于提升触觉感知灵敏度。结合理论计算与ANSYS有限元仿真阐述了本文电容式柔性触觉传感器的感知机理,同时,基于AD7147-1和STM32构建容性触觉信息采集与分析系统,并对本文提出的触觉传感器进行性能表征,实验结果论证了基于球曲面极板的电容式柔性触觉传感器用作电子皮肤的可行性。
1 触觉传感器结构设计及制备
1.1 触觉传感器结构设计
基于球曲面极板的电容式柔性触觉传感器结构如图1所示,主要由半球型柔性腔体、球曲面感应极板、柔性公共极板和柔性基体等构成,其中,球曲面感应极板、柔性公共极板以及极板引线均以有机硅导电银胶(YC-02,南京喜力特胶黏剂有限公司)为材质,YC-02型有机硅导电银胶(组份质量比10:1)固化后具有良好的电学特性和机械特性,被广泛应用于电磁屏蔽、柔性电子等领域[23];选用硅橡胶(GD401,中昊晨光化工研究院有限公司)制备半球型柔性腔体和柔性基体,单组份室温硫化GD401硅橡胶在空气中可自行固化成型,具有优良的电气绝缘性、化学稳定性和柔弹性。
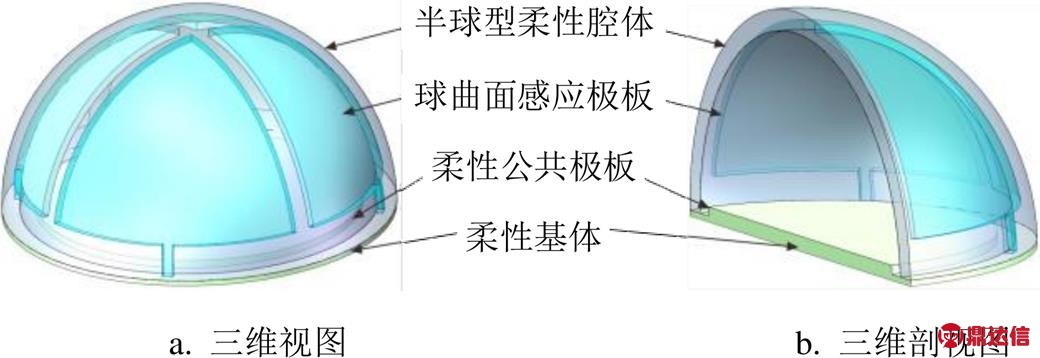
图1 电容式柔性触觉传感器结构
相较于同面多电极或类平行板结构电容式柔性触觉传感器,本文提出的电容式柔性触觉传感器由4个呈空间立体排布的球曲面感应极板对称分布于半球型触头内腔,与半球型触头底部柔性公共极板构成电容式触觉敏感单元(分别记作C1、C2、C3和C4),并构成差分结构。柔性公共极板表面均匀旋涂一层硅橡胶绝缘层以防止感应极板应力应变时与公共极板短接。空间立体排布的感应极板更有利于在受力作用下发生位移形变,外部作用力可通过半球型柔性腔体直接施加于感应极板,此外,4个球曲面感应极板与柔性公共极板构成差分式触觉敏感单元,进一步提升电容式柔性触觉传感器的检测灵敏度。
1.2 触觉传感器制备
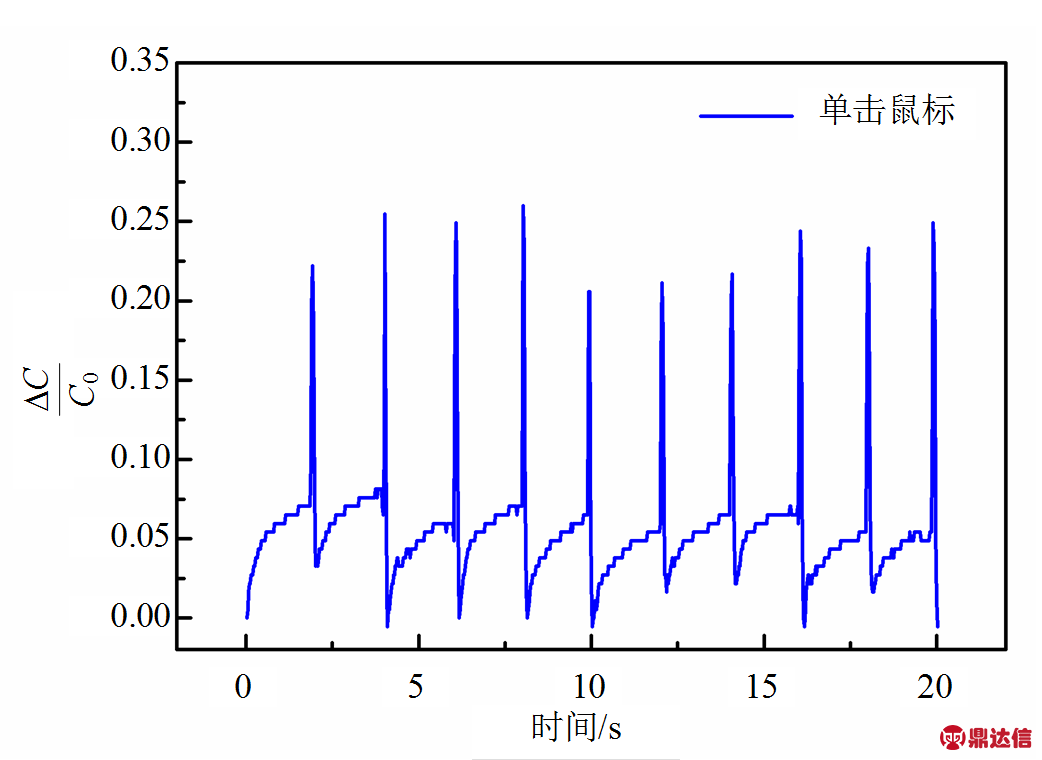
图2 电容式柔性触觉传感器制备流程图
基于球曲面极板的电容式柔性触觉传感器制备工艺主要涉及3D打印技术、流体成型技术和层层组装技术等。兼顾电容式柔性触觉传感器阵列分辨率、穿戴舒适性和制备工艺等因素,本文选择半球型触头内腔半径为5 mm,球曲面感应电极间距为1 mm,其制备流程如图2所示。首先,利用三维建模软件和3D打印机(Makerbot Replicator 2x,精度100 μm,美国)制备触觉传感器中半球型柔性腔体和柔性基体所对应的模具。其次,将硅橡胶注入模具置于真空干燥箱(DZF-6021型,上海索谱仪器有限公司),待室温固化后脱模即可获得所需半球型柔性腔体和柔性基体,并在半球型柔性腔体和柔性基体相应位置均匀涂覆YC-02型有机硅导电银胶制备球曲面感应极板和柔性公共极板(厚度约为50 μm)。此外,在柔性公共极板表面旋涂厚度约为50 μm的硅橡胶隔离层,最后将柔性基体与半球型柔性腔体进行粘接并引出电极引线即可获得本文基于球曲面极板的电容式柔性触觉传感器。从图1a可以看出,球曲面感应电极的极板引线与柔性公共极板设置在同一柔性基体中,有利于进行电容式柔性触觉传感阵列设计,可用作电子皮肤实现大面触觉感知。
2 触觉感知机理与特性测试
2.1 触觉感知机理
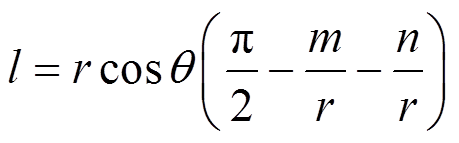
基于球曲面极板的电容式柔性触觉传感器的工作原理可等效为变极板间距式类平行板电容器,首先,通过理论计算分析本文电容式柔性触觉传感器输出电容与结构参数之间的函数关系,考虑其极板结构具有非平面、面积不相等的特点,基于微积分原理,将球曲面感应极板电容器等效为无限多个微电容器(类平行板电容器)的级联[24],并根据电容器级联规律进行积分。图3为单个球曲面极板电容器参数结构示意图,如图3a所示,假定半球型触头内腔半径为r,感应极板(厚度忽略不计)两端距离半球型触头内腔垂直中心边和水平边的弧长分别为m和n(0<m,n<πr/2)。如图3b所示,球曲面极板上各点与水平底端夹角q和底端投影长度l满足式(1),当夹角增加dq时,其投影宽度为rdq,在dq极小时,该微电容可视为类平行板电容器,微电容满足式(2),将球曲面极板电容器看作各微电容并联而成,则总电容C如式(3)所示。
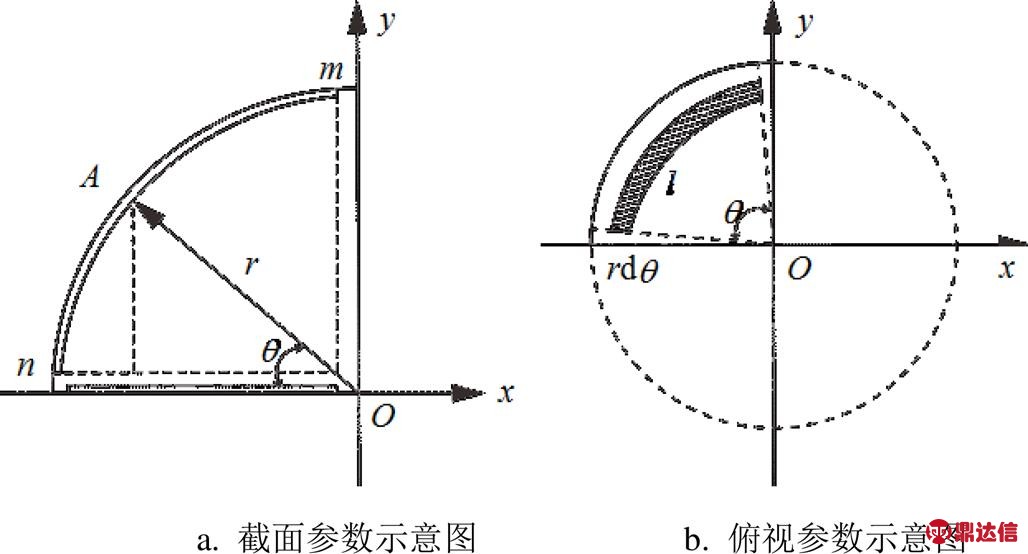
图3 球曲面极板电容式触觉传感器参数结构示意图
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中,e0为真空介电常数(e0=8.85×10-12 F/m);er为相对介电常数。
基于球曲面极板的电容式柔性触觉传感器工作原理如下:触觉传感器在未受力时,设初始电容分别为 、
、 、
、 和
和 ,受力F作用时4个电容的输出变化量分别为
,受力F作用时4个电容的输出变化量分别为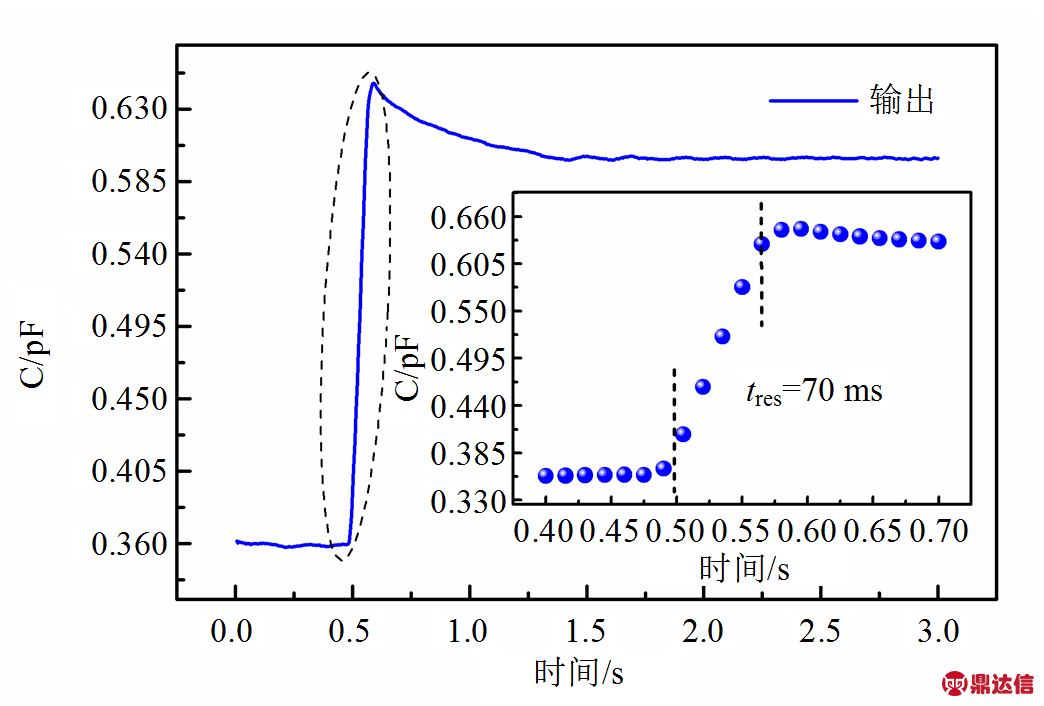 、
、 、
、 和
和 ,基于ANSYS有限元仿真分析外力作用下对球曲面感应极板的影响规律,简化后的球曲面极板电容式柔性触觉传感器应力应变结果如图4所示。由仿真结果可以看出,在法向力FZ作用下(图4a),球曲面感应极板与柔性公共极板间距减少,引起4个电容增加量相等;在切向力FX/FY作用(图4b),X轴(Y轴)方向差分电容输出增加,Y轴(X轴)方向差分电容输出无变化。此外,本文提出的基于球曲面的电容式柔性触觉传感器可用于三维力检测,在三维力F=(FXFYFZ)T作用下,各个分量力对应的电容传感器输出电容值(
,基于ANSYS有限元仿真分析外力作用下对球曲面感应极板的影响规律,简化后的球曲面极板电容式柔性触觉传感器应力应变结果如图4所示。由仿真结果可以看出,在法向力FZ作用下(图4a),球曲面感应极板与柔性公共极板间距减少,引起4个电容增加量相等;在切向力FX/FY作用(图4b),X轴(Y轴)方向差分电容输出增加,Y轴(X轴)方向差分电容输出无变化。此外,本文提出的基于球曲面的电容式柔性触觉传感器可用于三维力检测,在三维力F=(FXFYFZ)T作用下,各个分量力对应的电容传感器输出电容值( 、
、 和
和 )满足式(4)~式(6)中关系[25],通过标定、和与三维力分量FX、FY和FZ之间的关系,即可反演出三维力信息,从而实现三维力触觉感知功能。
)满足式(4)~式(6)中关系[25],通过标定、和与三维力分量FX、FY和FZ之间的关系,即可反演出三维力信息,从而实现三维力触觉感知功能。
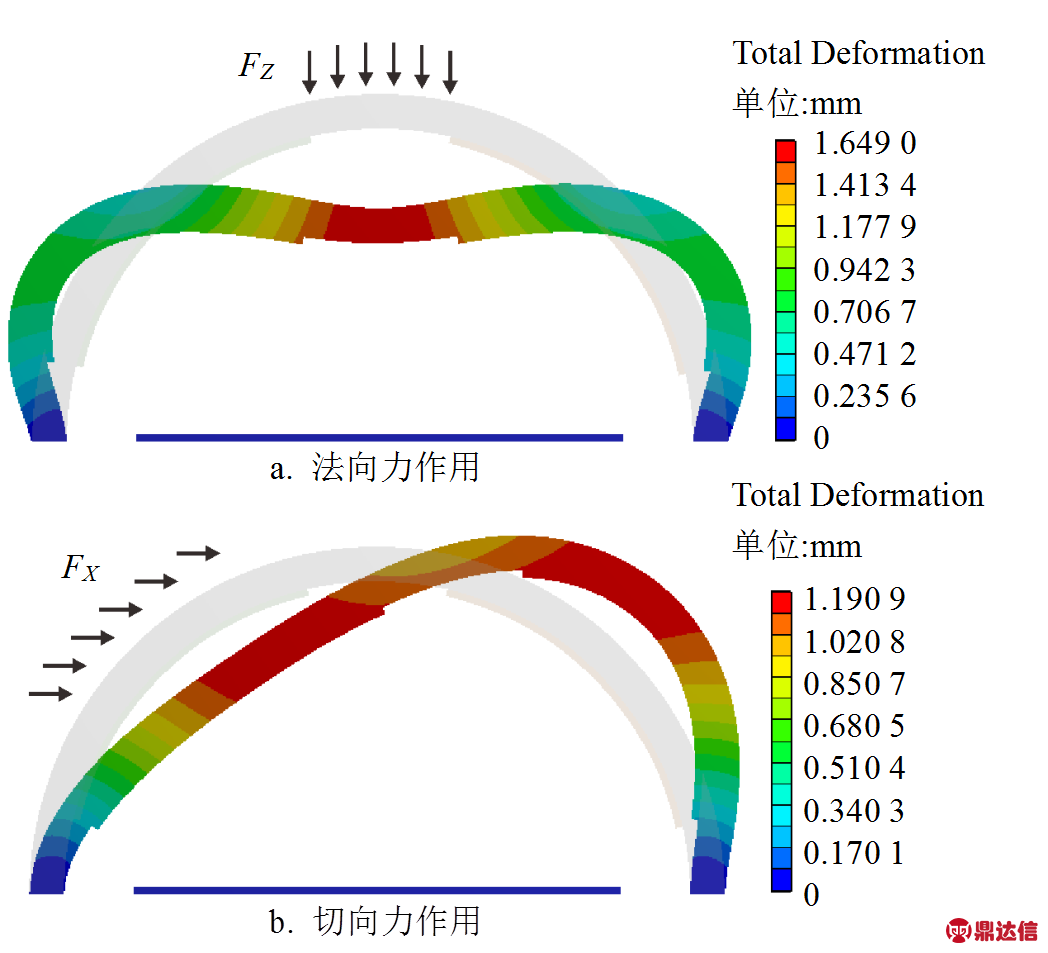
图4 球曲面电容式柔性触觉传感器应力应变仿真结果
 (4)
(4)
 (5)
(5)
 (6)
(6)
2.2 容性触觉信息提取
传统的电容测量方法主要有谐振法、中和电流法、脉宽调制法、数字相敏检波器法和交流电桥法等,通过分立元件将电容信号转化为电压、电流、频率或脉宽等信号,上述方法存在电路设计复杂、测量精度低等弊端。目前,集成电容检测芯片可分为CAV424/444系列,Pcap01/02/03系列和AD(ANALOG DEVICES)公司的AD774X与AD714X系列的电容数字转换器[26]。依据式(3),取r=5 mm,m=n=1 mm,计算单个球曲面电容式触觉传感单元输出电容值约为0.255 5 pF(忽略柔性公共极板表面硅橡胶隔离层)。
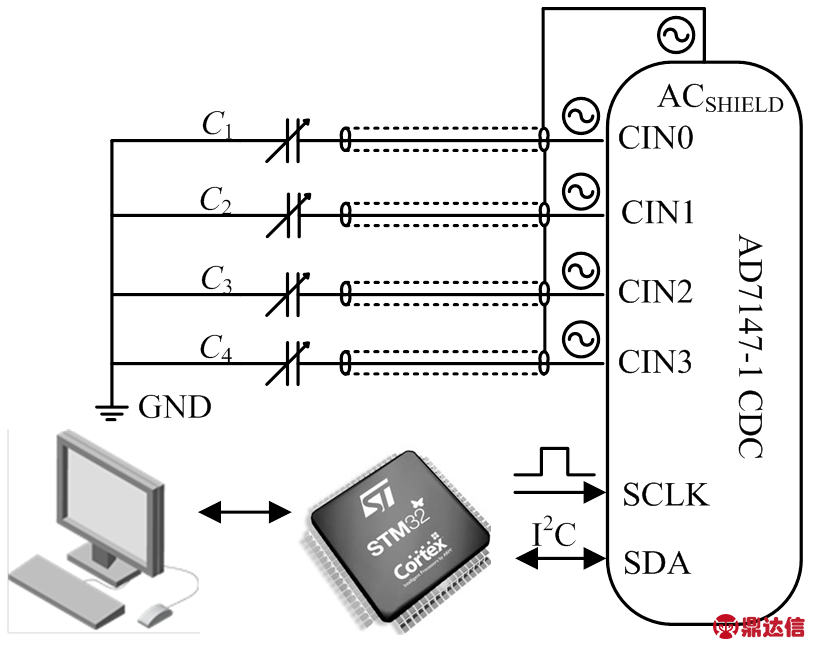
图5 容性触觉信号采集与处理系统
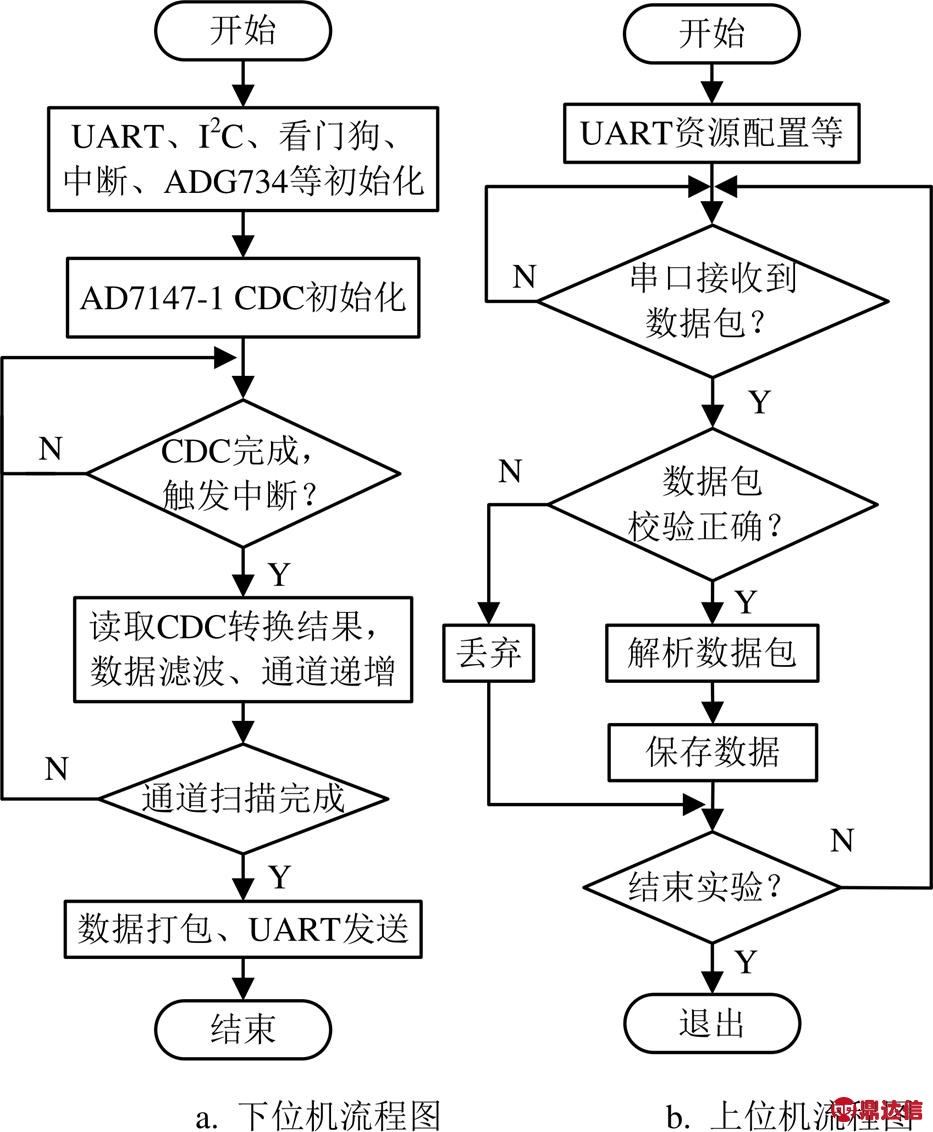
图6 容性触觉传感信息采集流程图
考虑到球曲面电容式触觉传感单元输出电容变化范围、测量精度及实时性等因素,本文选择高性能电容数字转换器AD7147-1和STM32微处理器搭建容性触觉信号采集与处理系统,如图5所示。AD7147-1拥有I2C接口及片内环境自校准功能,其有源交流屏蔽技术有效地消除了容性输入端与触觉传感单元间的寄生电容,高达16位CDC精度,13路容性输入,结合32位微处理器可方便的实现多路容性触觉信息的采集[27],其容性触觉传感信息采集流程图如图6所示。下位机对容性触觉信息进行实时采集并通过串口传至上位机,上位机接收到数据验证无误后保存以便进一步分析。
2.3 特性测试及应用
导电银颗粒在基体中的分布状态是影响柔性极板电学性能的重要因素,图7a和图7b分别为柔性极板的DMM-200C型金相电子显微镜(上海蔡康光学仪器有限公司)和SU8020型场发射扫描电子显微镜(日本日立公司)的微观表征结果。可以看出,有机硅导电银胶固化后表面均匀平滑,且导电银颗粒均匀分布且相互连接,有利于形成较为稳定的导电网络,从物理结构层面为柔性极板实现良好的电学特性提供了保障。
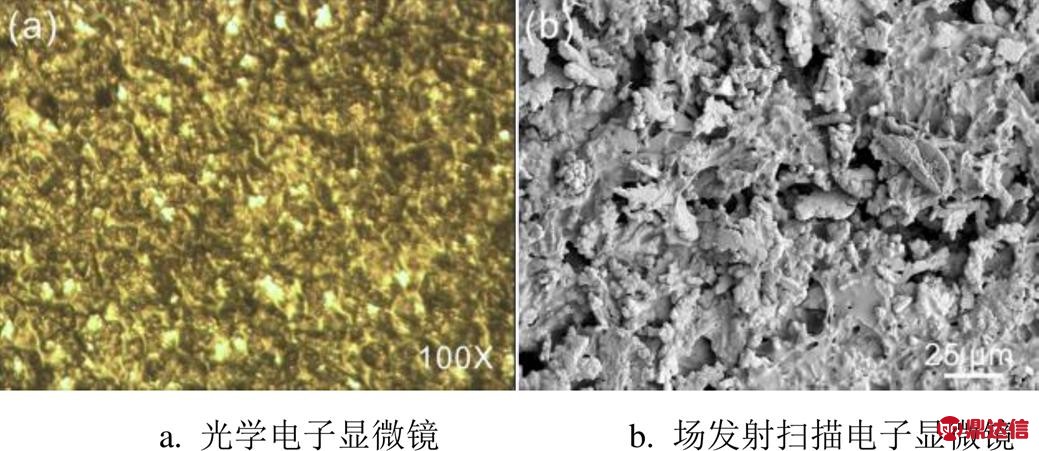
图7 柔性极板微观结构表征
使用LS-WD-100型万能拉压力机(深圳力森科技有限公司)对本文球曲面极板电容式柔性触觉传感器进行力学特性表征,并通过容性触觉信息采集与处理系统实时采集触觉传感器输出。图8为0~5 N范围内法向力作用下,球曲面极板电容式柔性触觉传感单元输出特性曲线。可以看出,法向力作用下,球曲面感应极板与柔性公共极板间距减小,输出电容值均呈增加趋势,与上述分析结果保持一致,且在0~2 N和2~5 N范围内具有良好的分段线性,其检测灵敏度分别为0.807 N-1和0.278 N-1。在0~5 N范围内切向力作用下电容式柔性触觉传感器的输出特性曲线如图9所示,在切向力作用下,球曲面感应极板与柔性公共极板间距减小,同时,沿切向力方向的球曲面感应极板与柔性公共极板之间的等效极板面积发生变化,最终表现为:差分电容C1-C3呈现增加趋势,C2-C4基本保持不变,由此实现切向力检测。
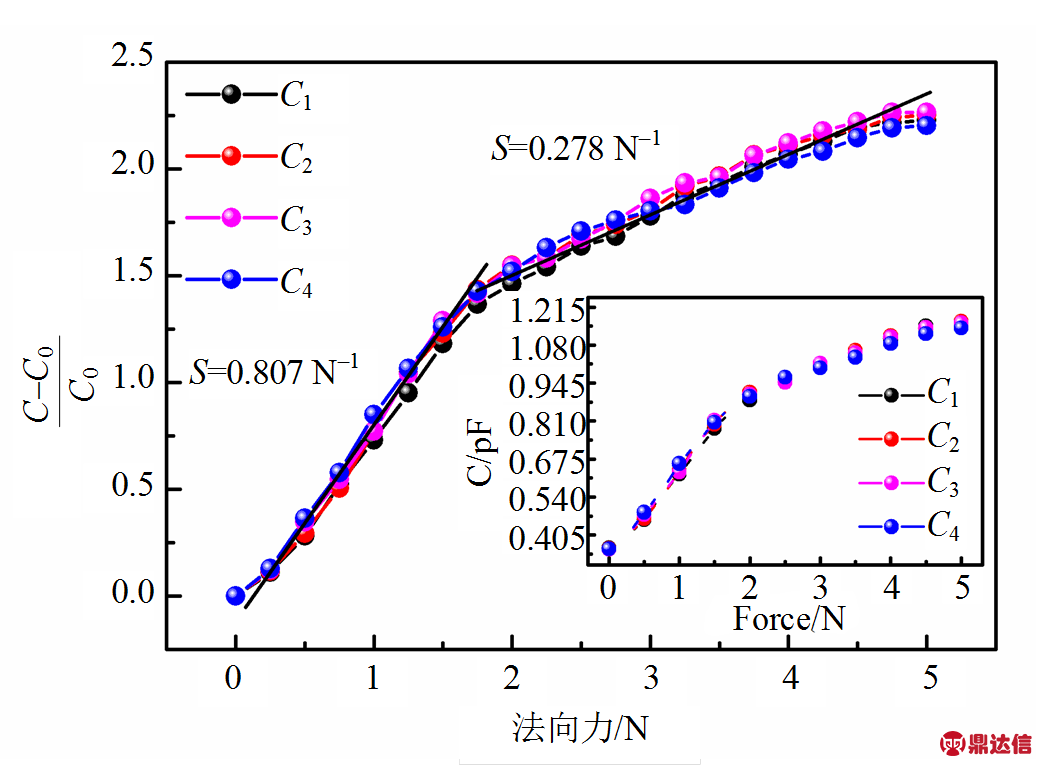
图8 法向力作用下电容式触觉传感器输出特性
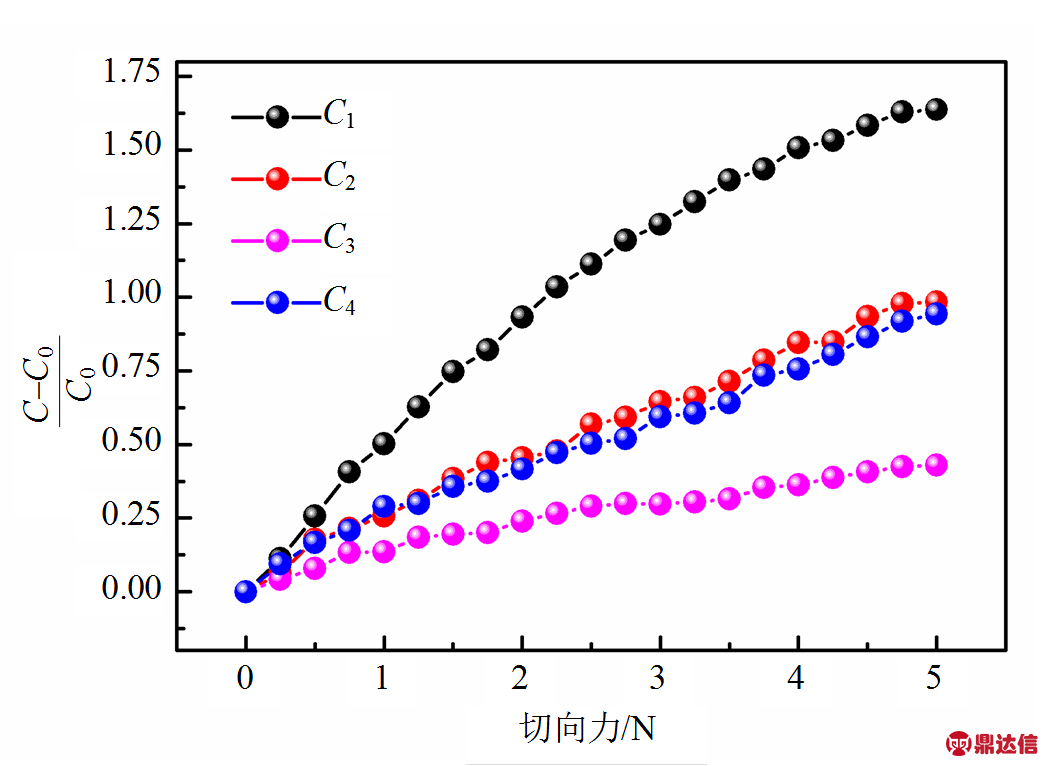
图9 切向力作用下电容式触觉传感器输出特性
电容式柔性触觉传感器具有良好的动态响应特性,对本文提出的球曲面电容式柔性触觉传感器施加频率为0.5 Hz的动态加载,观察其动态响应曲线如图10所示。可以看出,在0.5 Hz的循环动态加载下,球曲面极板电容式柔性触觉传感器仍可做出快速响应并展现出良好的机械重复性和电学稳定性。
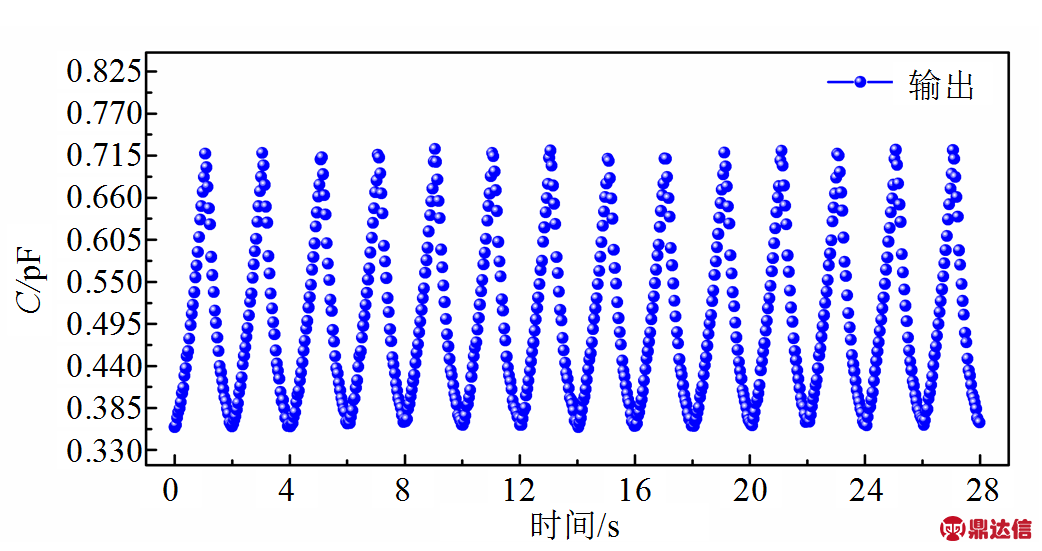
图10 循环动态加载测试
为进一步测量其动态响应时间,对本文球曲面电容式柔性触觉传感器施加一阶跃激励,测得其响应特性曲线如图11所示,响应时间约为70 ms。
图11 球曲面极板电容式柔性触觉传感器响应特性
为阐述本文球曲面极板电容式柔性触觉传感器用作电子皮肤实现触觉感知的可行性,将电容式柔性触觉传感器固定于手指,并连续单击鼠标和敲击键盘输入字母‘O’‘K’等动作,同时,容性触觉信号采集与处理系统实时记录球曲面电容式柔性触觉传感器的输出,其测试结果分别如图12和图13所示。可以看出,敲击按键时,电容式柔性触觉传感器球曲面感应极板受力被压缩,极板等效间距减小,传感器输出达到峰值,由于每次单击按键的力度和时间间隔不同,其输出峰值也略有差异。将本文传感器布置于机械手抓取重物,并在重物下方逐渐挂上砝码以模拟三维力加载,依据式(4)~(6),解析其三维力信息如图14所示。
通过佩戴本文提出的球曲面电容式柔性触觉传感器可实现指尖触觉感知并区分不同手指的动作。此外,球曲面电容式柔性触觉传感器可连续检测同一指尖动作,说明该触觉传感器作为电子皮肤在触觉感知中具有良好的机械鲁棒性和稳定性,进一步论证了其用作电子皮肤实现触觉感知的可行性。
图12 连续单击鼠标
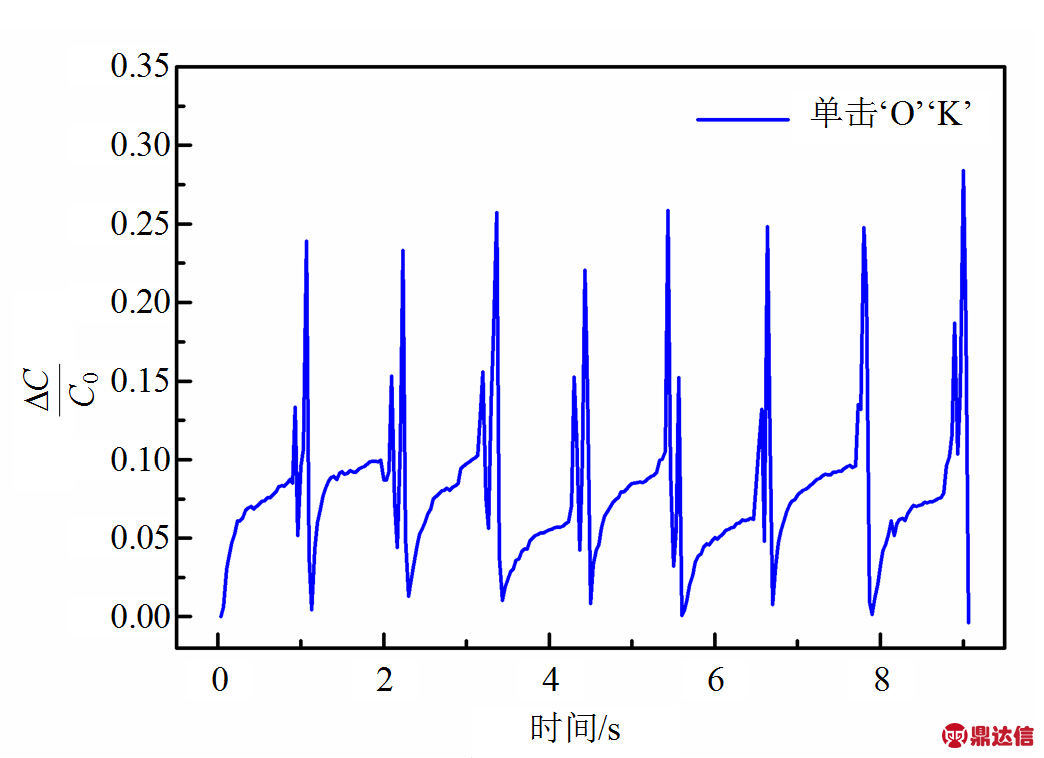
图13 连续单击‘O’‘K’字母
图14 机械手抓取重物应用实验
3 结束语
本文提出一种基于球曲面极板的电容式柔性触觉传感器,通过设计呈空间立体排布的感应极板和差分式结构以提升电容式柔性触觉传感器的灵敏度。介绍了球曲面极板电容式柔性触觉传感器的结构特点和制备流程,同时,基于微积分原理对球曲面极板电容式柔性触觉传感器输出电容值进行了理论计算,并结合ANSYS有限元仿真分析其触觉感知机理。基于高性能电容数字转换器AD7147-1和STM32微处理器搭建容性触觉信号采集与处理系统,对本文电容式柔性触觉传感器力学特性进行测试,并用作电子皮肤应用于触觉感知实验。结果表明,本文提出的基于球曲面极板的电容式柔性触觉传感器具有较高的灵敏度,动态响应时间为70 ms,具备法向力和切向力感知功能,可作为电子皮肤应用于人机交互、软体机器人、软抓取、人工智能等领域。


