
摘 要:风速风向传感器能够实时准确可靠地提供风速风向数据,是确保风区铁路运输安全的关键要素之一。兰新铁路大风具有风速变化范围大、风向变化快的特性,对传感器的动态响应特性提出更高的要求。通过风洞模拟真实环境下风速风向改变的条件,对超声式和热场式风速风向传感器及强风仪分别进行动态特性实验,研究结果表明:各传感器均存在风速跟随性误差,但均满足使用要求;热场式传感器的风向跟随误差较小,超声波传感器风向跟随误差相对稍大,且风向输出不稳定;风向改变角速度降低时,传感器风向输出波动明显减小。
关键词:风速风向传感器;动态性能;风洞实验;校核参数
随着列车运行速度的提升,列车运行安全性受到更多的关注。恶劣环境(特别是大风)对列车气动性能影响极大[1−3],是引起行车安全问题的重要原因之一。为了最大限度保障列车运行安全,各国均建立了大风监测系统,实时监测和预警,指挥行 车[4−7]。风速风向传感器作为大风监测系统的主要组成部分,其输出准确性对行车指挥系统具有重要作用。刘昕等[8−10]通过对风速风向传感器的实验,得到风洞校准和现场校准方法,能够获得传感器的性能参数。但目前对风速风向传感器的标定多为静态校准,考核其静态指标,忽略其在变化的环境中输出稳定性。新疆铁路风区是世界铁路内陆大风风速最高、风灾最严重的地区之一。百里风区最大瞬时风速可达60 m/s[12],8级以上大风盛行风向较为稳定,集中在NNE至NNW方向上。但是通过对大风监测站的数据进行分析,得到在新疆铁路沿线不同位置的大风监测站风向略有不同,十三间房站累年最大风速的风向为北风,风向最为集中,最多风向频率达到59.3%,乌鲁木齐风向最为分散,最多风向频率为14.9%。研究表明:老风口不同于新疆其他风区,该地区在持续大风天气过程中,东、西大风相继出现,风向交替明显,在某次连续大风天气过程中,风向交替4次,偏东大风极大值为28.3 m/s,偏西大风极大值为32.5 m/s。同时有研究人员通过对2015~2016年新疆南疆线百里风区风速监测点风力数据进行平均风和脉动风分析,表明南疆线百里风区典型强风天气的脉动性较强。风速风向传感器稳定、高效的运行是保障列车正常运行的条件。本文通过对新疆铁路沿线风场进行分析,并结合风洞实验,对多种类型传感器的动态性能进行测试,提出一种新的动态参数考核方法,不仅能快速、准确得出各类型传感器在不同环境下的测量准确性,同时为风区铁路用风速风向传感器选型提供依据。
1 新疆铁路沿线环境风速风向特性分析
选取2014年兰新铁路第二客运专线某一测风站大风数据为分析对象,风速数据如图1所示,风向数据如图2所示。其中图2(a)为实时风向数据,图2(b)为风向数据的每秒变化值。
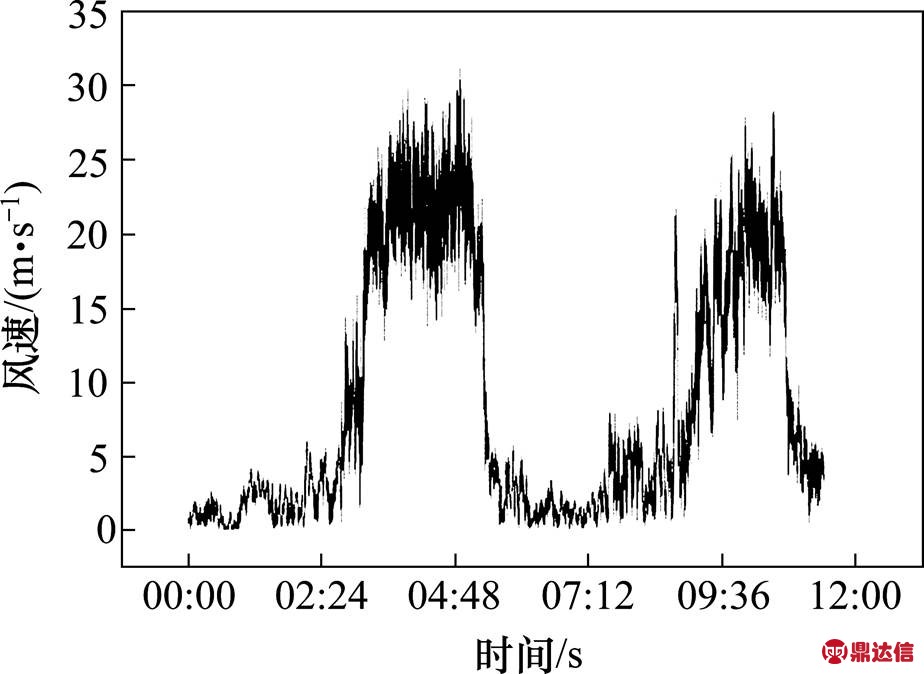
图1 风速随时间变化曲线
Fig. 1 Wind speed over time curve
由图1风速变化曲线可以看出,风速由5 m/s增加到25 m/s的起风时间为1 h,风速由25 m/s降低到5 m/s以下的停风阶段的时间小于1 h,在这2个阶段风速变化较快。
由图2(a)可得到,同一场大风中,当风速大于某一值时,风向比较稳定,但是在风速较小的起风阶段和风停阶段,风向变化较大。因传感器风向测量范围为0°~359°,当风向跨越0°时,会出现较大的波动曲线,因此对数据进行处理,当风向D大于180°时,D′=D−360°,同时对风向数据进行差值运算,用后1 s的数据减去前1 s的数据,得到其差值(即风向变化率),并绘制风向变化率随时间变化的曲线如图2(b)所示。最大变化角度为79 (°)/s,风向角的变化集中在−40°~40°。
为了保证测试数据的可靠性,《铁科技[2013]50号高铁风速风向、雨量监测设备技术条件》对现有多种类型风速风向监测设备提出相应的技术条件。由实验数据可知,现场环境起风速度快、变化剧烈,但是现有技术条件只是针对传感器静态指标进行验证,缺乏相关动态测量标准的指标。为了保证测试数据的准确性,因此需要在风洞中模拟现场环境风速风向改变的环境,对传感器的动态响应特性进行分析。
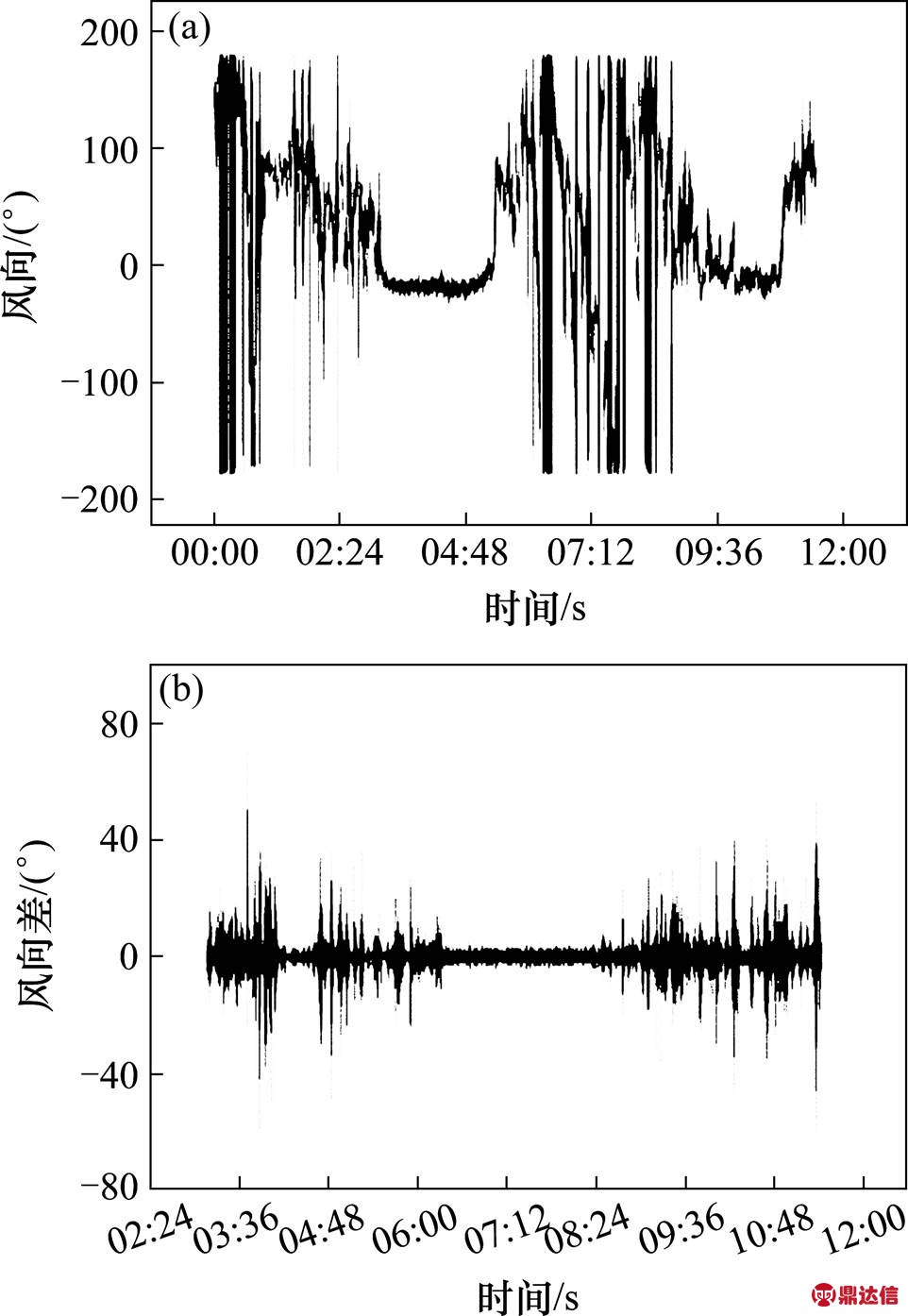
(a) 风向角实测数据;(b) 风向角变化率
图2 风向角和风向角变化率随时间变化曲线
Fig. 2 Wind direction and wind direction change rate with time curve
2 风速风向传感器动态特性实验设备及检测参数
2.1 实验设备
实验设备为中南大学轨道交通安全教育部重点实验室的风速风向传感器校准风洞。该风洞同时具备高速试验段和低速试验段,本文试验在高速试验段完成。高速试验段高0.8 m,宽1 m,长3.4 m,风速范围为5~60 m/s,速度稳定性≤0.5%,湍流度≤0.5%。试验风洞实物图如图3所示,风洞中安装角度仪,角度仪与步进电机相连,通过PC电脑控制步进电机旋转得到不同的旋转角度。角度仪在旋转开始阶段和结束阶段的旋转加速度为18 (°)/s2,稳定阶段的旋转速度通过控制面板进行设置。风洞风速通过微差压传感器测量风洞试验段不同截面的多点静压平均值计算得到。微差压传感器微ZCY- 012系列智能数字差压传感器,具有精密温度补偿和信号放大功能,灵敏度高、稳定性好、精度高,能实时稳定输出风洞风速值。
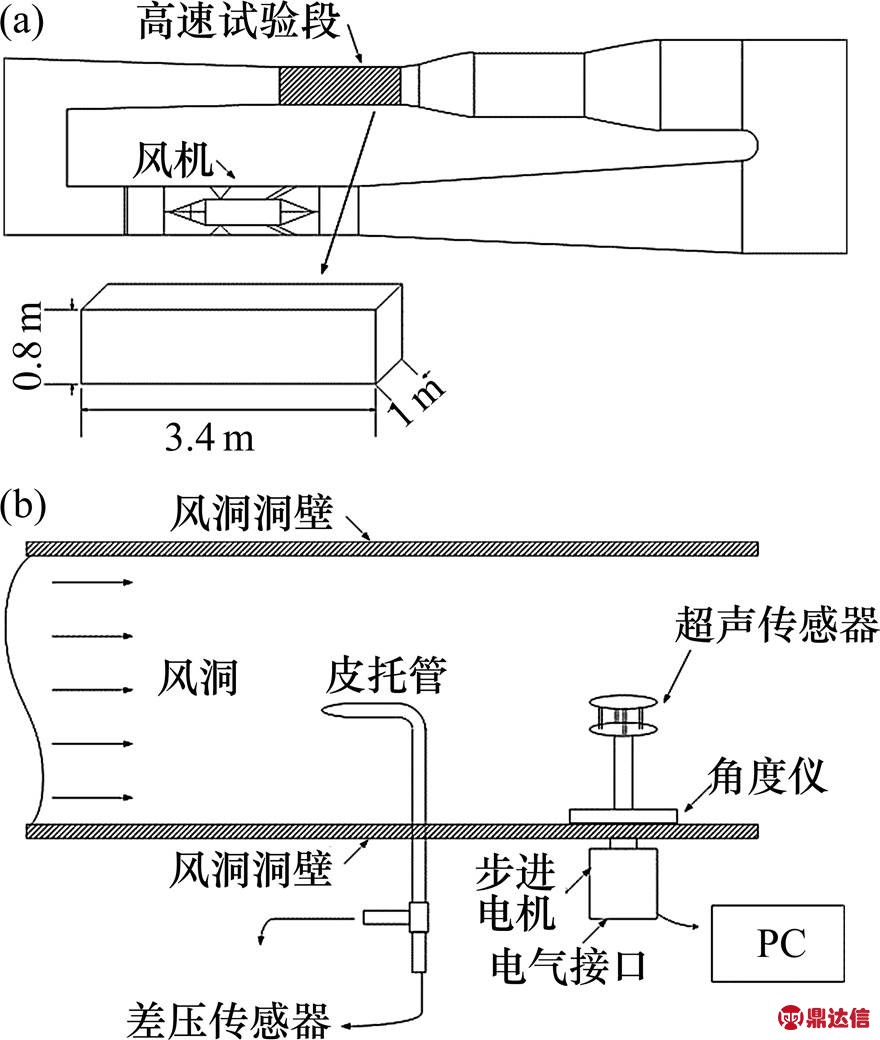
(a) 整体图;(b) 试验段内部图
图3 风速风向传感器校准风洞实物图
Fig. 3 Experimental steup for the performance test in the wind tunnel
2.2 试验用风速风向传感器
目前,铁路大风监测系统用的传感器有超声传感器、热场传感器和机械式风速仪三大类。机械式风速仪由螺旋桨或叶片组成,目前应用最为广泛。螺旋桨旋转速度与风速成正比,通过测量螺旋桨的转速可以得到风速数据,但是其存在旋转部件,具有惯性并且容易引起机械磨损[13]。
超声波式风速仪通过测量超声波在空气中的传播时间得到风速,并因采样率高和实时性好,且不存在机械磨损,得到广泛应用[14]。但是超声波探头具有较差的环境适应性,容易受到沙尘的影响。
热线或热场式风速仪的工作原理分为恒温和恒流2种模式,通过加热周围空气,并将热量流失转化为电信号,从而得到风速。热场式风速仪在测量低速流动时具有较高的稳定性[15],但是相比其他类型传感器,热场式风速仪具有较大的功耗,并且在测量过程中,加热元件极易被损坏。
试验选取不同厂家的不同类型的传感器,如表1所示。试验传感器包含2个超声式风速风向传感器,1个热场式风速风向传感器和1个强风仪,4个传感器的量程均为0~70 m/s。进行动态指标校准之前,均对各传感器进行静态指标校准,各传感器静态指标均满足标准要求。因强风仪存在旋转部件和惯性,对风速测量存在较大的滞后性,因此本文主要研究和对比超声传感器和热场传感器,强风仪只进行风速启停实验,风向跟随性不讨论。
表1 实验传感器
Table 1 Experimental Sensor

2.3 风速风向传感器动态特性检测参数
动态标定是指风速风向传感器在外界环境风变化的情况下,输出风速风向的准确性,包括风速变化和风向变化。风洞实验室风速0~60 m/s连续可调,通过在风洞中安装角度仪,并将风速风向传感器安装在角度仪上,由电脑控制角度仪进行旋转,模拟环境风向改变的情形,从而根据输出数据得到风速风向传感器的跟随特性以及风向改变时风速输出稳定性。
《铁科技[2013]50号高铁风速风向、雨量监测设备技术条件》中对传感器的静态指标做了详细的描述,本文对多种传感器的动态响应特性进行实验分析,并得到传感器动态指标标定方法。该方法适用于检测超声波式和热场传感器的风速和风向动态响应特性。为了能捕捉风速的动态变化,根据规范,传感器的采样频率设置为4 Hz,风速输出4 次/s,风向输出1次/s。
1) 风洞风速启停跟随性实验:启动风洞,同时记录风洞风速和传感器输出风速,当风洞风速达到设定风速后稳定一段时间,关闭风洞,对比风洞风速和传感器输出风速的变化曲线;
2) 风向旋转跟随性实验:使传感器在稳定的风洞风速中旋转,模拟环境风向不稳定的情形,以不同的旋转速度和旋转方向分别进行实验,分析传感器输出数据,得到风向跟随性。
3 风速风向传感器动态特性试验及结果
3.1 风洞风速启停跟随性实验
传感器风向角固定,风洞风速以最快速度从0 m/s增加到50 m/s,并稳定一段时间后,切断风洞风机电源,让风洞风速再从50 m/s减到0 m/s过程中传感器对风洞风速的响应。实时记录风洞风速和传感器风速数据进行对比。
传感器在风洞中安装如图4所示。
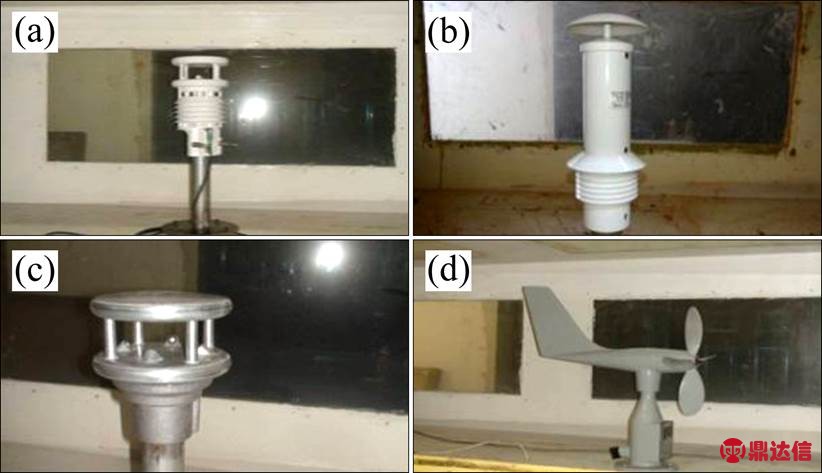
(a) LUFFT WS500超声传感器;(b) IRDAM WST6000热场传感器;(c) LUFFT-VENTUS超声传感器;(d) 强风仪
图4 传感器安装图
Fig. 4 Sensor installation diagram
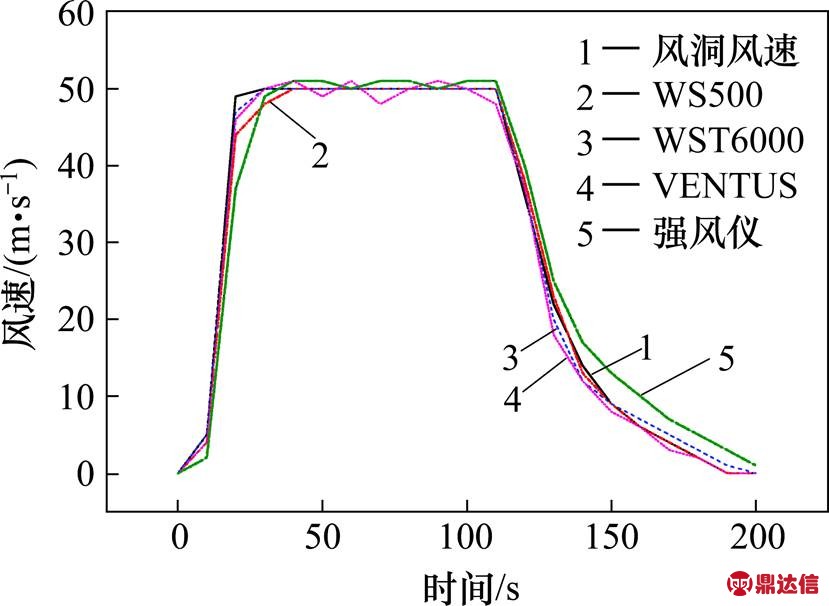
图5 传感器风速启停响应曲线
Fig. 5 Sensor speed start and stop response curve
实验时,风速上升速度和下降速度均大于现场真实环境。如图5所示,在上升和下降阶段各传感器输出均能实时反映真实风速大小。由图5可以看出,IRDAM WST6000热场式传感器具有最好的跟随性,滞后时间仅为0.9 s;LUFFT WS500超声波传感器在风速上升阶段具有较好的跟随性,但是风速大于40 m/s时具有一定的滞后性,滞后时间为10 s;LUFFT-VENTUS超声波传感器虽然跟随性很好,但是在风速稳定阶段输出具有波动性,稳定性较差;强风仪在因为惯性旋转部件的存在,开始阶段滞后风洞风速,并且在下降阶段具有较明显的滞后性。
3.2 变风向情况下风速风向测试实验
在风速不变的情况下,利用电动转盘带动传感器旋转,模拟自然环境下风向突变的情况,根据传感器输出风速风向数据,与风洞风速和转盘转动数据对比,得到变风向条件下传感器输出结果以及传感器的风向跟随性。
将传感器安装在电动转盘上,转盘由步进电机控制,步进电机加速和减速阶段的加速度均为18 (°)/s,稳定旋转速度为45 (°)/s,旋转方向为顺时针旋转。当风洞风速稳定在20 m/s时,设定转盘旋转角度为720°,转盘进行自动旋转。传感器的风速输出如图6所示。
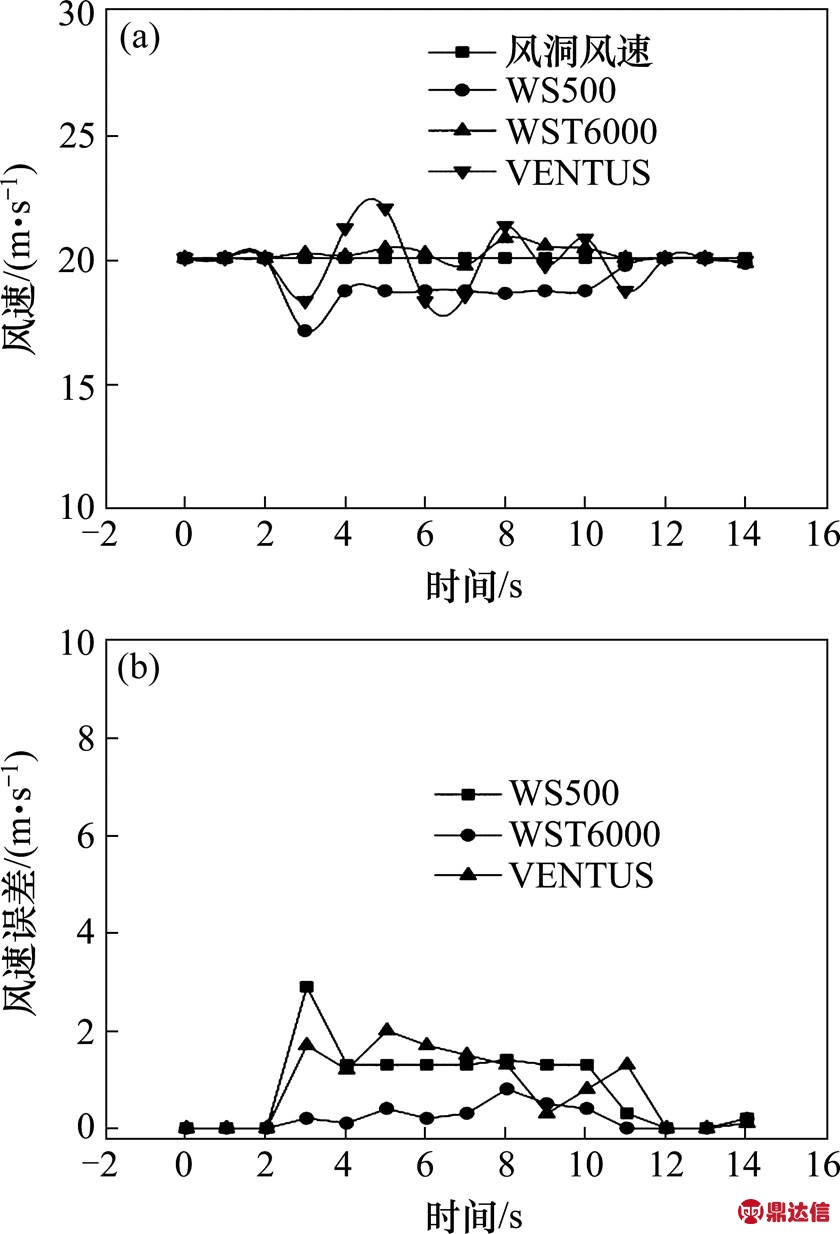
(a) 传感器风速值;(b) 风速相对误差值
图6 变风向条件下传感器风速输出
Fig. 6 Sensor wind speed output when change the wind direction
由图6可知,在标准风速为20 m/s时,以45 (°)/s改变风向,传感器的输出会发生变化,其中WST6000热场传感器输出较稳定,误差较小;WS500和VENTUS超声波传感器在风向改变时,输出结果存在较大误差,最大误差分别为3.1 m/s和2.3 m/s。
当转盘转动时,传感器的风向数据输出如图7所示。步进电机带动转盘转动,步进电机的转动由上位机程序控制,转盘以−18 (°)/s2的加速度加速至45 (°)/s后稳定运行,然后以−18 (°)/s2的加速度减速至0。因此,理论上传感器的风向值应该与电机的转动角度值一致,因电机转动720°,所以风速传感器的风向数据需要进行处理,即在转完第1个360°之后的输出值应该加360°。由图7数据可知,IRDAM WST 6000热场传感器的风向值与电机转动角度趋势一致,但存在一定的滞后,即存在风向跟随误差,且误差较小;LUFFT WS500和LUFFT- VENTUS超声波传感器同样具有风向跟随误差,且风向输出不稳定,误差较大。
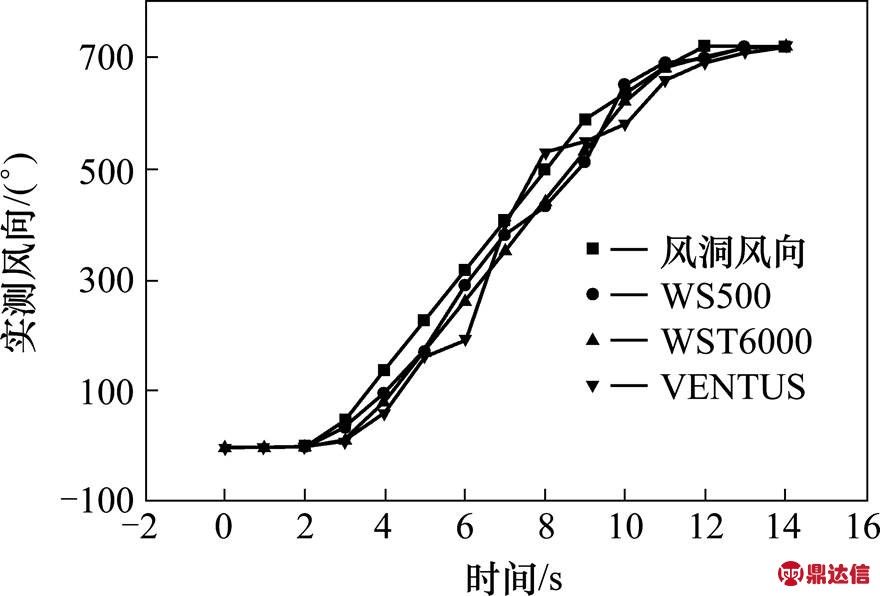
图7 变风向时传感器风向输出曲线
Fig. 7 Sensor wind direction output curve when change the wind direction
3.3 变风向角改变率情况下传感器风速风向测试实验
实验以不同的风向改变角度进行,根据传感器输出值分析其性能参数。传感器为LAMBRECHT- 16420热场传感器,如图8所示,该传感器风速测量范围为0~60 m/s,风向为0°~360°。

图8 LAMBRECHT-16420热场式风速传感器安装图
Fig. 8 Figure for LAMBRECHT-16420 thermal field wind speed sensor installation
实验分别以90,45,30和20 (°)/s进行,通过实验数据分析传感器在不同的风向角变化速度时的风向跟随性,实验结果如图9所示。
由图9可以看出,当风向以90 (°)/s的速度改变时,传感器风向输出具有较大波动,处于非正常工作状态,但是当风向改变角速度降低时,波动明显减小。当风向以20 (°)/s改变时,传感器风向输出趋于稳定。
总之,在磁性理念引导下的护理人员具有较高的组织忠诚度及主人翁意识,工作满意度,职业幸福感,较强的队伍凝聚力,维持了护理队伍的稳定性。磁性医院能够有效降低患者病死率,预防并发症,改善患者安全和护理质量,提高患者满意度,建立良好的工作环境。因此,磁性文化的推广对我们提升临床护理人员专业能力、构建安全医疗服务环境提供了开阔思维和理论依据,为临床护理管理工作开拓了视野,为深入持续开展优质护理服务提供更多创新性方案。
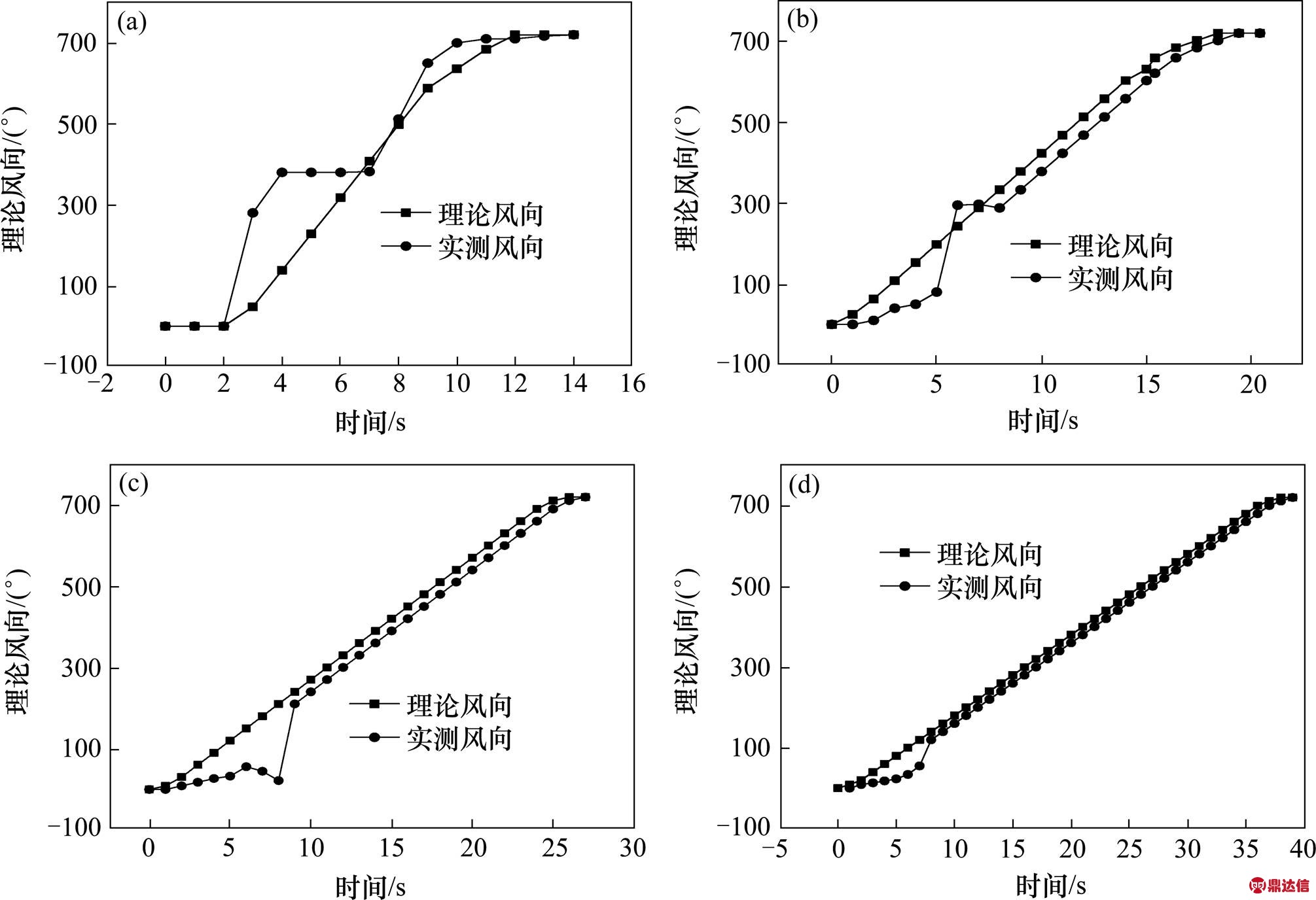
(a) 旋转速度90 (°)/s;(b) 旋转速度45 (°)/s;(c) 旋转速度30 (°)/s;(d) 旋转速度20 (°)/s
图9 不同风向角改变率时的风向跟随性
Fig. 9 Wind direction of the sensor when it rotates at different angular speeds
4 结论
1) 实验用多个传感器的风速启停跟随特性略有差异,但均可满足要求。
2) 超声波风速风向传感器在风向改变时,由于探头和4个圆柱会引起流场的变化,造成测量误差,而热场式风速风向传感器在风洞中旋转时受到干扰较小。因此,WST6000热场式风速风向传感器在环境风速风向变化的情况下较WS500和VENTUS超声波风速风向传感器具有较好的表现,输出稳定性较高。
3) LAMBRECHT-16420热场传感器在以不同风向改变角度进行实验时,其风向跟随性具有较大差异,在风向跟随性风向以90 (°)/s的速度改变时,传感器风向输出具有较大波动。当风向改变角速度降低时,波动明显减小。当风向以20 (°)/s改变时,传感器风向输出在开始阶段出现波动,但之后趋于稳定。


