
摘要:呼吸频率及呼吸模式检测可用于医疗诊断以及人体健康评估。传统的医学检测器件体积大、能耗高、使用不便捷。针对高性能、低成本、便携式电子产品的迫切需求, 本工作利用氧化石墨烯材料自发极化后对湿度敏感的特性, 通过喷墨印刷方法制备了一种可以实现自供能的平面型湿度传感器。所制备的传感器对湿度响应呈现为线性关系, 并且具有优异的灵敏度、快速响应和恢复特性、多次循环稳定性和长期老化稳定性等特性。基于该传感器可以实现对于人体呼吸频率和呼吸模式等的检测。制备的湿度传感器具有制作简单、成本低、不易受人体行动及外界环境干扰等优点, 适用于实时监测呼吸频率和呼吸模式。
关 键 词: 湿度传感器; 氧化石墨烯; 自发极化; 呼吸检测; 喷墨印刷
呼吸频率与呼吸模式是重要的人体生理指标,会随着发热、疾病等身体状况的变化而发生改变[1-4]。可采用呼吸频率和呼吸模式等生理指标进行医疗诊断以及人体健康评估。呼吸频率和呼吸模式的异常通常表明身体健康状况的异常[5-7]。此外,还可以利用呼吸频率来检测运动过程中的乳酸阈值[8]。传统上利用插入鼻腔内部的鼻氧管检测呼吸频率,通常会导致佩戴不适等问题[9]。压电式、温差式、压阻式、声波式等其他常用的呼吸监测传感器也存在各种各样的缺点,例如,压阻式和压电式传感器容易受到人体运动等行为的干扰;声波式和温差式传感器容易受到环境的影响[10-12]。湿度传感器具有结构简单、不易受环境影响的优点,可以利用呼吸过程中湿度的变化实现对呼吸频率和呼吸模式的检测,近年来引起业界的广泛关注[13-14]。
石墨烯基材料气体传感器被广泛应用在气体分子检测中[15-19], 但是石墨烯亲水性很差。氧化石墨烯(GO)表面有大量的含氧官能团, 使其具有很好的亲水性, 可用于湿度响应。目前已有的GO湿度传感器, 主要有电容式和电阻式两种, 即通过测量不同湿度条件下器件的介电常数或者电阻率的变化来标定相对湿度的大小[20-28]。GO的电导率会随着引入官能团数量的增加而变小, 导致所制备的湿度传感器的阻值过大, 增加了信号检测的难度。此外, GO湿度传感器用于持续监测, 其能耗问题也不可忽视。近年来, 曲良体课题组[29-30]采用电极化方法使GO薄膜表面的官能团呈现为梯度分布, 进而在表面吸附水分子时电离出的电荷会发生定向迁移, 并产生极化电压。这种通过自发极化现象产生的电学信号强度较高, 并且响应速度较快, 适合于监测湿度的变化。目前还没有基于自发极化电信号用于实时监测呼吸频率和呼吸模式的传感器的相关报道。
本工作提出利用喷墨印刷方法制备平面构型的柔性GO湿度传感器, 该构型易于集成, 信号检测方便, 适于佩戴, 可以避免“纤维型”和“三明治型”传感器不适于佩戴的问题[30]。探索了GO湿度传感器尺寸参数对器件灵敏度、响应时间和恢复时间等特性的影响, 对人体呼吸频率和呼吸模式进行了检测, 并对传感器的循环稳定性和使用寿命等进行了研究。
1 实验方法
1.1 石墨烯墨水制备
可用于印刷的石墨烯墨水的制备采用如下方法: 首先利用改进的Hummers法制备氧化石墨[31], 将制备的氧化石墨进行反复清洗直至溶液的pH=6, 然后将溶液离心浓缩至5 mg/mL。其次, 将浓缩的氧化石墨溶液稀释至2 mg/mL, 然后在冰水浴中超声处理1 h, 可以得到剥离的GO薄片溶液。利用孔径为0.8 µm的针筒式过滤器过滤掉尺寸较大的薄片后, 在滤液中加入2vol%的乙二醇调节墨水的表面张力和粘度。将制备好的墨水放入冰箱保存备用。
1.2 湿度传感器的制备
我看到一个忙碌的身影,抵达古樟后,他就和几位摄影家一起,一直在顺光与逆光等诸多因素中纠结,想要为这次诗会找一个最佳的背景。
1) 利用计算机绘图软件绘制出掩模板的图案, 然后在清洗过的聚对苯二甲酸乙二醇酯(PET)衬底上激光打印出图案作为模板(图1(a)和(b));
2) 在印刷的模板上溅射一层Au薄膜(厚度约60 nm), 在四氢呋喃中超声约15 s去除模板, 得到间距可调控的Au电极(图1(c)和(d));
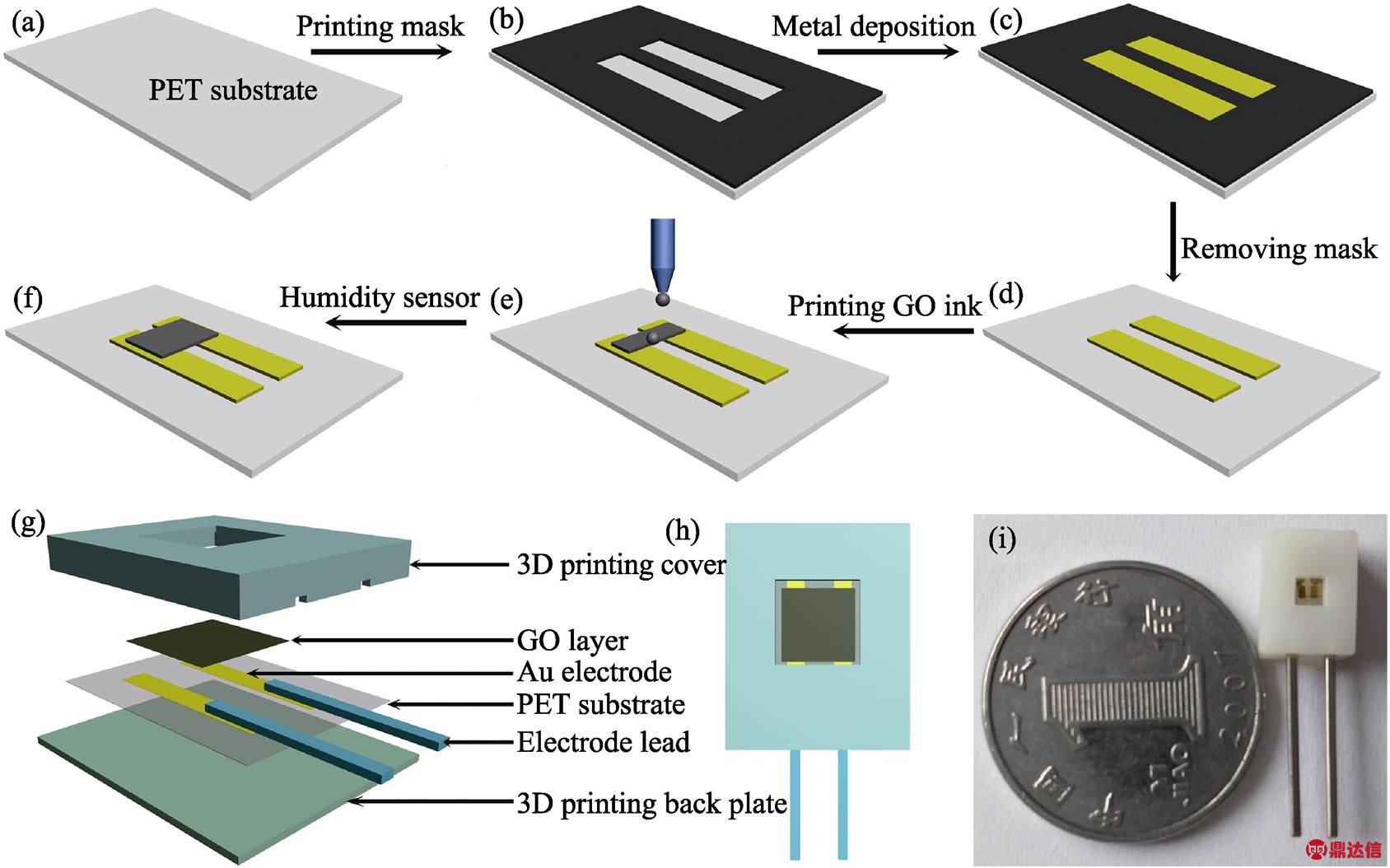
图1 平面型GO湿度传感器制备流程图
Fig. 1 Flow-chart for the fabrication of planar GO humidity sensors
3) 利用喷墨打印机在两个Au电极之间印刷线条长度和宽度可以调控的GO薄膜(图1(e)和(f));
4) 将印刷好Au电极的GO薄膜封装到利用3D打印技术制备的树脂外壳内(图1(g)~(i));
5) 在相对湿度75%及室温(25℃)条件下, 在GO薄膜两端加3 V的极化电压, 时间为5 min, 使其表面形成浓度呈梯度分布的官能团[31]。至此, 完成GO湿度传感器的制备。
1.3 表征方法
利用场发射扫描电子显微镜(SEM, Sirion 200)表征所制备的GO薄膜的微观形貌; 利用DMP- 2831型压电式驱动喷墨打印机印刷GO薄膜; 利用德国Zahner IM6ex电化学工作站测试器件的电学参数, 利用徕卡DMI3000 B倒置显微镜获取器件的形貌信息。
2 结果与讨论
2.1 GO湿度传感器的工作原理
当在GO薄膜两端的Au电极之间加载直流 电压时, 会形成横向电场, 导致电子浓度的梯度分布以及GO薄膜表面的官能团的梯度还原现象 (图2(a))。在吸附水分子时, 官能团表面会脱出质子H+, 从而带负电荷, 因此也就产生了梯度分布的H+(图2(b)), 并自发形成极化电场, 其方向由H+浓度较高的区域指向浓度较低的区域。H+会在浓度梯度的作用下进行扩散并形成极化电压及极化电流(见图 2(c)), 该极化电压即为待检测的电信号。当外界湿度较小时, 水分子会从GO表面脱附, 并产生反方向的电压和电流(图2(d))[30]。电极之间的极化电压直接反映出相对湿度的大小。此外, GO薄膜的尺寸决定了极化电压的大小, 以及器件的灵敏度和响应特性。
2.2 湿度传感器的形貌表征
利用喷墨印刷获得的GO薄膜的形貌如图3所示。其中Au电极之间的距离约为170 µm(图3(a)), GO线条横跨在两个Au电极之间。图3(a)中的放大图显示GO薄膜表面有大量褶皱, 与GO材料特性相符。图3(b)所示的截面图表明GO薄膜的厚度约为500 nm, 其结构比较蓬松, 易于吸附水分子。本文中所制备的Au导电电极的方块电阻约为4.6 Ω/□。由传感器的结构示意图(图 3(c))可以得到薄膜长度为L, 电极间距为D。
2.3 GO湿度传感器的结构优化
为了进一步探索GO传感器信号大小与电极间距的关系, 制作了线条长度(L=100 µm) 相同, 间距不同的GO薄膜及湿度传感器。图4(a)~(d)显示了不同间距样品的光学图片。采用的普通的激光打印机可控制的电极间距最小为170 µm。由图可见, 随着湿度的增大, 器件的极化电压也在线性增大, 直至间距达到1000 µm时对湿度响应消失; 此外, 器件的响应电压随间距减小而增大(图4(e))。其中, 不同的相对湿度可以由密闭容器中不同的饱和盐溶液获得。
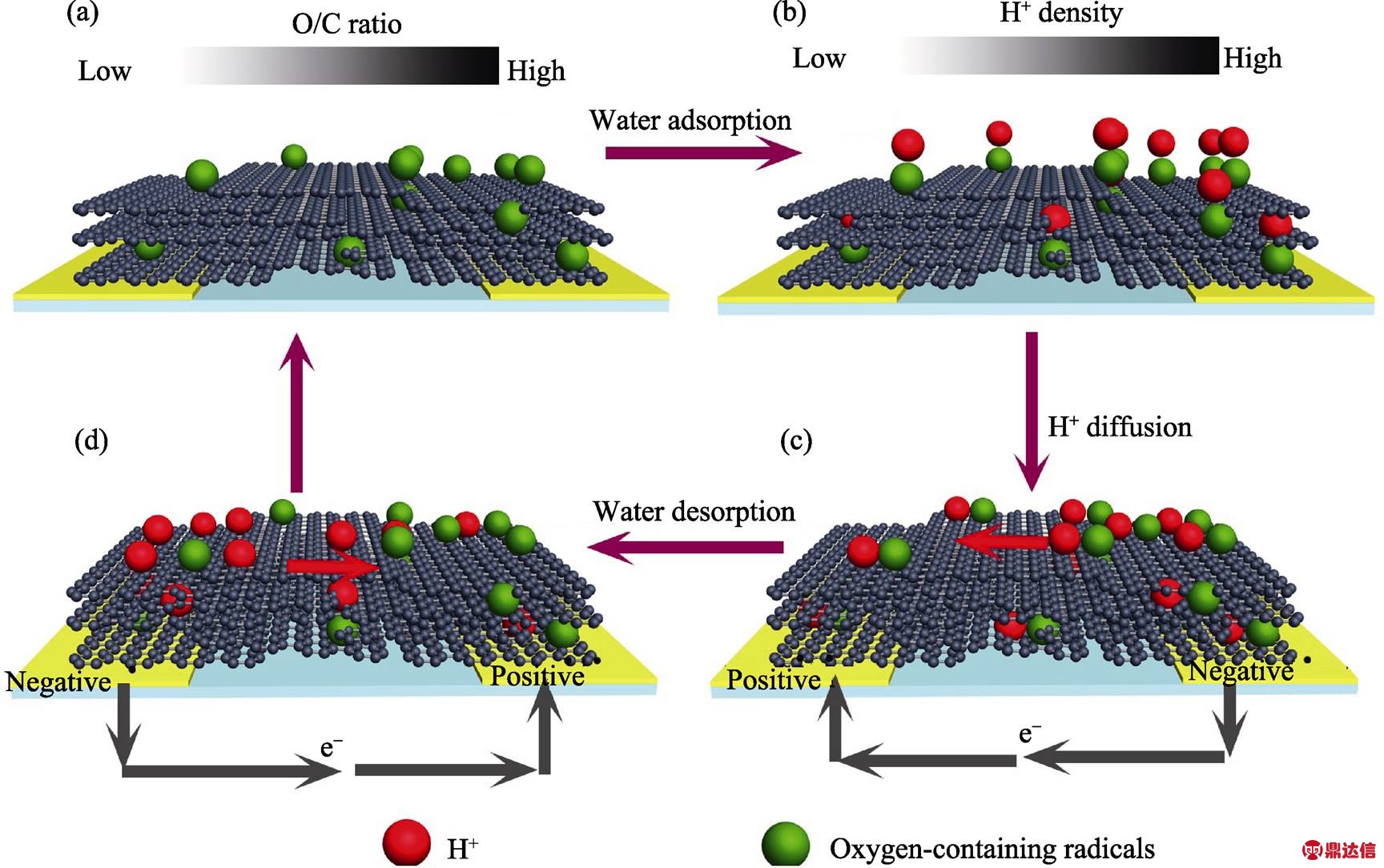
图2 GO湿度传感器响应原理示意图
Fig. 2 Schematic illustration of the working principle of GO humidity sensors
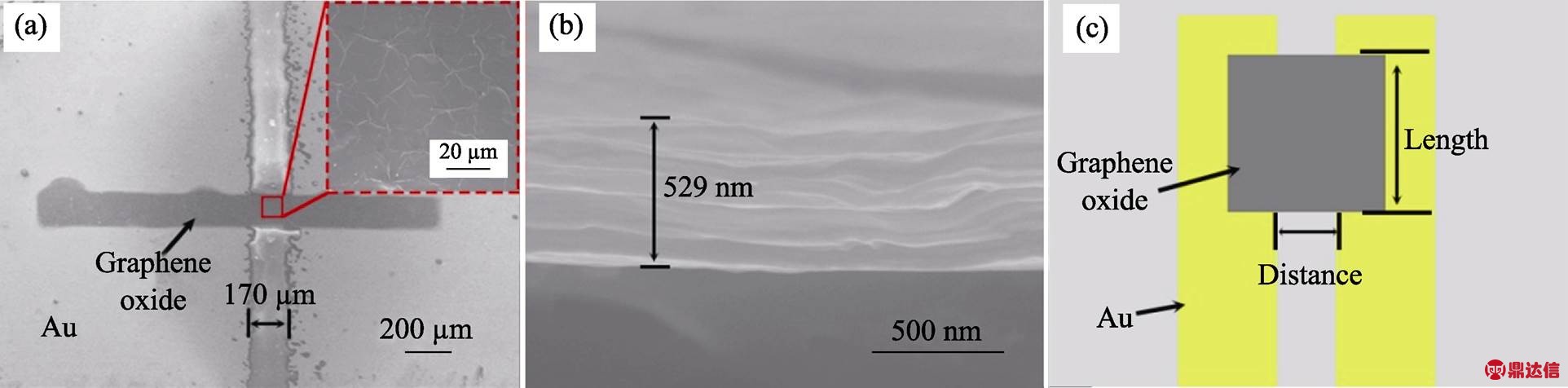
图3 GO湿度传感器形貌图
Fig. 3 Morphologies of GO humidity sensor
Top view SEM image with inset showing an enlarged view of GO; (b) Side view SEM image; (c) Schematic illustration of the GO humidity sensor
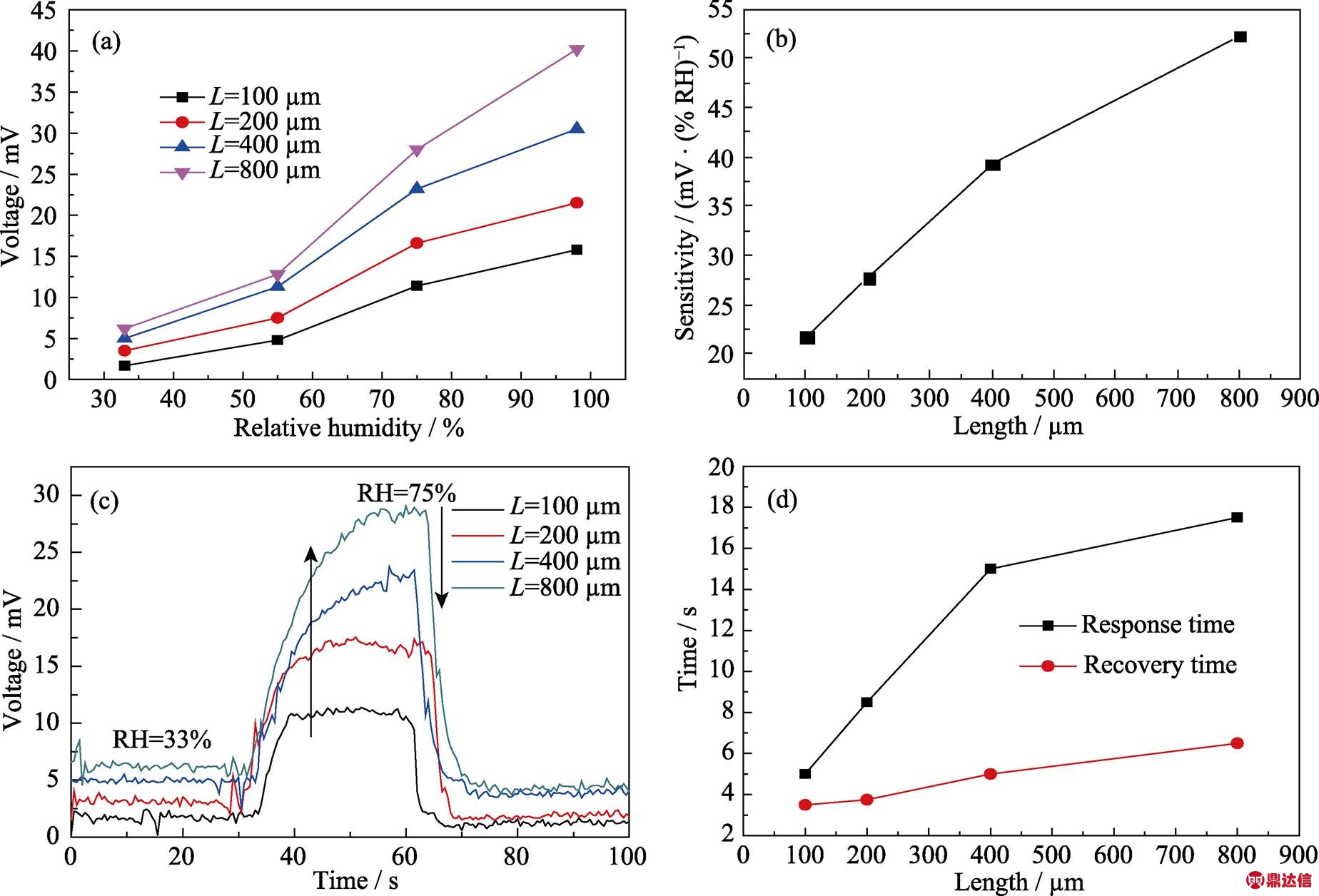
图4 GO湿度传感器感应电压与电极间距的关系
不同间距D电极的光学图片(a) 170 µm; (b) 330 µm; (c) 500 µm; (d) 1000 µm; (e) 不同间距样品感应电压随相对湿度变化曲线; (f)不同间距样品灵敏度
Fig. 4 Correlation between the induced voltage of GO humidity sensor and the electrode spacing
Photographs of the electrodes with the spacing D (a) 170 µm, (b) 330 µm, (c) 500 µm, (d) 1000 µm. (e) Induced voltage vs relative humidity for sensors with varied electrode spacing. (f) Sensitivity of sensors with varied electrode spacing
器件的灵敏度S可以通过以下公式获得
其中, DU为感应电压的变化量, DRH为相对湿度变化量。计算可知, 当相对湿度从33%增加到98%时, 间距越小响应越灵敏, 并且器件响应的线性较好。在最小间距设定为170 µm的条件下, 比较传感器感应电压和两电极之间GO线条长度的关系。通过喷墨印刷可以得到长度为130、204、403、796 µm的GO薄膜。从图5(a)中可以看到, 在相对湿度固定时, 器件的感应电压及灵敏度随着线条长度的增加而增大(图5(b))。极化电压的大小不仅与GO薄膜表面官能团的浓度梯度大小紧密相关, 也取决于电极之间薄膜电阻的大小。研究表明, 在间距较小以及GO在电极间线条越长的情况下, 电极间的电阻也越小, 在相同相对湿度条件下产生的信号也越大, 灵敏度也越高。对传感器的响应/恢复特性进行了测试。传感器的响应特性可以由相对湿度上升过程的测试获得, 其恢复特性可以由相对湿度下降过程的测试获得。GO湿度传感器的响应和恢复速度较快(图5(c)), 并且随着GO线条长度的增加, 响应时间在线性增加(图5(d))。其原因是极化电压的大小和吸附水分子的量随着GO薄膜线条长度增加而增加, 同时吸附面积的增大会导致动态吸附和脱附平衡时间及器件响应时间延长。器件的恢复时间随着GO薄膜线条长度的减小而缩短, 其原因是水分子的脱附随着水分子吸附量的减小而加快, 达到动态平衡的时间短, 也即器件的恢复时间短。研究发现当GO薄膜线条长度为100 µm时, 传感器的响应时间为5 s, 恢复时间为3.5 s, 具有较快的响应和恢复特性。可以通过缩短GO线条长度、降低GO的缺陷密度进一步缩短器件的响应时间。
图5 不同长度的GO湿度传感器的特性
(a)感应电压随相对湿度的变化曲线; (b)灵敏度随GO线条长度的变化曲线; (c)对相对湿度的响应曲线; (d)响应/恢复时间随GO线条长度的变化曲线
Fig. 5 Characteristics of humidity sensors with varied length
(a) Induced voltage vs relative humidity; (b) Sensitivity vs length; (c) Response at different relative humidity; (d) Response time vs length
2.4 GO湿度传感器呼吸检测性能
研究结果表明传感器的灵敏度随着电极间距减小而增强; 器件的响应和恢复速度随着电极间GO薄膜线条长度的减小而变快。在本工作中用于研究呼吸检测性能的GO湿度传感器的结构参数为D=170 µm, L=100 µm, 灵敏度为22 mV/%RH, 响应时间为5 s, 恢复时间为3.5 s。利用GO湿度传感器对健康的成年人呼吸进行检测, 测试过程中将湿度传感器贴在鼻腔下侧, 实时检测传感器两端的极化电压信号。
利用优化的GO湿度传感器, 可以检测正常静态呼吸、稍快速呼吸、急促呼吸, 以及暂停呼吸或者深呼吸等不同呼吸模式下的极化电压信号(图6)。研究结果充分表明所制备的GO湿度传感器检测精度好, 能够充分地满足呼吸频率和呼吸模式的精准检测需求。图6中偶尔出现的负值电压是由水分子脱附导致的极化反转所引起的, 该现象进一步表明本文中的GO湿度传感器检测的准确性[31]。
CCUS-EOR技术,可以提高原油采收率、增加油气产量、减少能源对外依存度。矿场实践表明,二氧化碳-EOR提高采收率幅度达8%~20%,是有效的增产手段,对国家能源安全具有重要的战略意义。
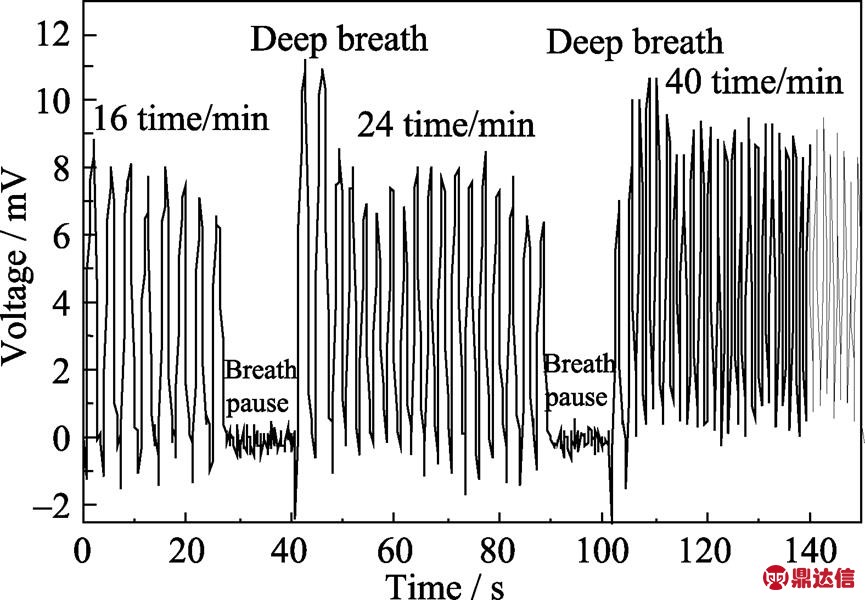
图6 GO湿度传感器检测人体呼吸频率图
Fig. 6 Respiratory frequency detected with GO humidity sensors
GO湿度传感器的长期稳定性是器件的重要的性能指标。由于器件在自然环境下的老化现象, 检测的精度以及响应和恢复速度都会退化, 并影响器件的检测效果。对GO湿度传感器的长期稳定性的测试是非常有必要的。传感器放置在恒温恒湿的样品柜中3个月后, 仍能准确地检测呼吸频率和呼吸模式(见图7(c)和(d))。
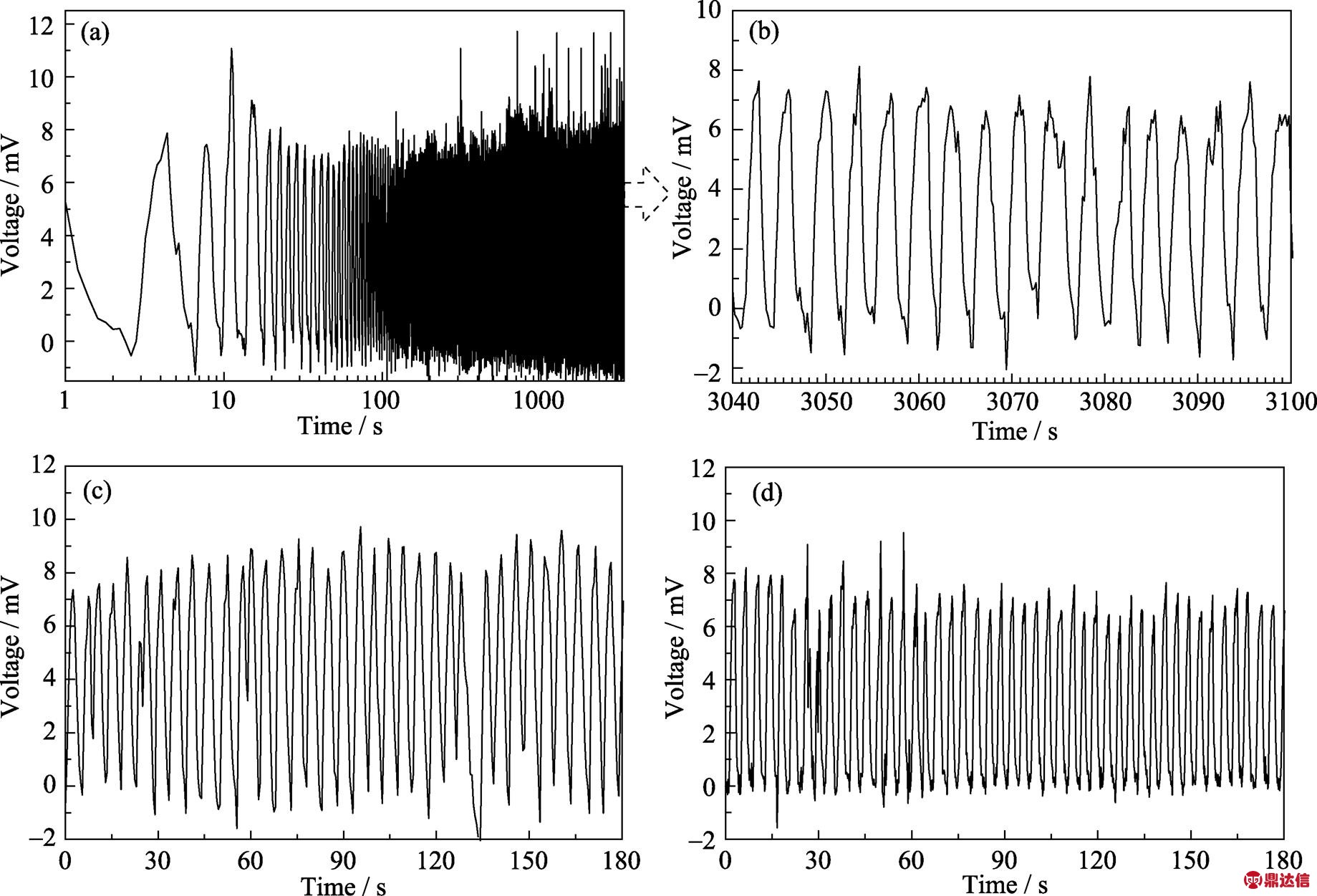
图7 GO湿度传感器循环稳定性和使用寿命
Fig. 7 Recycling and long-term stability of GO humidity sensors
(a) Recycling stability; (b) Enlarged view of the curves between 3040 s and 3100 s in (a); Stability of the sensors before (c) and after (d) storage for three months in a cabinet
3 结论
利用喷墨打印方式制作了一种基于GO自发极化产生电信号原理的自供能平面型柔性湿度传感器。研究了GO湿度传感器的结构参数对器件极化电压大小、灵敏度、响应和恢复时间的影响。研究结果表明器件的极化电压随着电极间距的减小而增大, 灵敏度随着电子及间距的减小而增强。确定了最优的器件结构参数, 器件对应的响应时间为5 s, 恢复时间为3.5 s, 灵敏度为22 mV/%RH。利用优化的GO湿度传感器检测人体呼吸过程, 并实现了对正常静态呼吸、快速急促呼吸等不同呼吸频率的检测。该湿度传感器循环稳定性好、制备成本低、使用便捷, 有望在智能医疗领域发挥重要作用。


