
摘要:提出了一种基于气动柔性驱动器的3个自由度手指指节法向力可控的包络抓持模型。分析了目标物体受力状况,按照手指指节与目标物体之间的各个接触力尽量均匀的原则,对目标物体受力进行了优化。建立了关于手指指节接触点所受到的法向力及摩擦力与关节驱动器输出力之间的力学模型。使用2个触力传感器,应用杠杆原理建立了接触点法向力及其作用点的测量模型。提出了指节接触点法向力的双闭环控制策略,设置了补偿器对摩擦力进行实时补偿,对压力反馈信号进行微分处理,用以消除压力检测信号中所包含的高频噪声。搭建了试验平台,试验结果表明:手指法向力动态响应时间为约1 s,误差范围稳定在±0.5 N。
关键词:气动柔性驱动器 3自由度手指 包络抓持 指节力模型
引言
在机器人多指手包络抓取中,多指手与目标物体之间有多个接触点,Reuleaux[1]早在1875年就证明在二维平面情况下,要达到形封闭需要至少4个光滑接触点,或者3点有摩擦点接触或软指接触;Markenscoff等[2-4]提出了3维空间结构物体进行形封闭抓取至少需要7个无摩擦接触点,或者4点有摩擦点接触或软指接触。李剑峰等[4]对灵巧手包络抓持的鲁棒性作了分析和探讨,给出了具有一般意义的抓持鲁棒性存在的充分必要条件。Yashima等[5]在假设接触点为光滑无摩擦力的前提下以包络抓持的方式实现对目标物体的操作;Lionel等[6]同样在假设接触点为光滑无摩擦力的前提下提出了欠驱动机械手的输出力模型;光滑接触约束的假设简化了抓取力的分析,实际抓取中存在摩擦是必然的,这种保守的假设往往会得出不合实际的结论。Masahiro等[7-8]通过多个触觉传感器感知目标物体在多指手中的位姿信息并通过包络抓持的方式实现对目标物体的位姿变换。
当考虑摩擦时,若假定手指和物体均为不变形的刚体,多指手包络抓取系统通常是一个静不定系统,因此无法根据力与力矩平衡方程确定每一个抓取力。本文以基于气动柔性驱动器(Flexible pneumatic actuator,FPA)的3个自由度手指为例,将包络抓取接触点的法向力作为主动力,对各个法向力进行闭环控制,将接触点的摩擦约束看作被动约束,将相应的摩擦力看作被动力。
1 目标物体受力模型
2个平面3个自由度手指对目标物体进行包络抓持,如图1所示。θ1和θ4分别为右侧和左侧手指第1个关节与X轴之间的夹角,它们由相应关节与X轴初始夹角及关节转动角两部分组成;左、右两侧手指其余关节的转动角分别为θ2、θ3、θ5、θ6。以被抓持物体为研究对象,对指节法向力FN和接触点摩擦力Fμ分别建立力平衡方程
式中 FNi——第i指节和物体间的法向力,N
式中 Fμi——第i指节和物体间的切向摩擦力,N
将式(1)分解为X和Y方向的方程
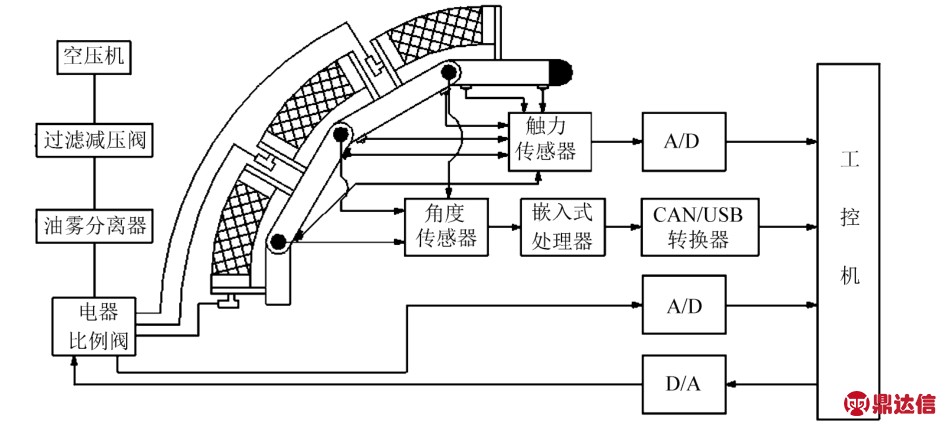

图1 目标物体受力图
Fig.1 Force diagram of object

设重力加速度为垂直于纸面方向,机械手是依靠各手指和被抓持物体之间的摩擦力将物体抓持起来的,则在临界状态(即抓持最大质量G位置状态)其力平衡条件为
式中 μ——指节与被抓持物体间的摩擦因数
考虑到作业对象为果实,其组织柔软、易损伤,用手指抓持果实时,要求手指指节与果实之间的各个接触力大小尽量均匀,为此需要采用优化的方法来寻求合适的抓持力。针对图1所示的抓持模型,建立优化模型,设计变量

目标函数为
式(3)、(4)、(5)为约束条件。
例如:取θ1=70°,θ2=42°,θ3=51°,θ4=63°,θ5=50°,θ6=45°,μ=1.0,G=10 N。上述模型为有约束非线性规划,采用遗传算法求解可得:FN1=1.750 8 N,FN2=1.671 2 N,FN3=1.577 N,FN4=1.578 4 N,FN5=1.670 2 N,FN6=1.751 6 N。
2 手指多点输出力模型
2.1 基于FPA的气动柔性弯曲关节
基于FPA的柔性弯曲关节由转轴、连杆、联接件、左端盖、右端盖、橡胶管、螺旋钢丝及进气接头组成,其中FPA由橡胶管和螺旋钢丝组成,如图2所示。压缩气体从右端盖通入FPA的内腔,由于螺旋钢丝的约束作用,橡胶管不作径向膨胀,而产生轴向伸长,并通过联接件推动连杆以转轴为中心转过一定的角度。释放FPA内腔的压缩气体,在橡胶管的弹性力的作用下,FPA恢复到初始状态,关节连杆也回转到气动驱动器原来位置。由于空气的可压缩性,FPA的刚度比较低,即弯曲关节的回转副具有较好的柔性;另一方面,除了气动驱动器,弯曲关节的其他零件均为刚性构件,具有较高的刚度,较好地模拟了人类手指弯曲关节运动[9]。
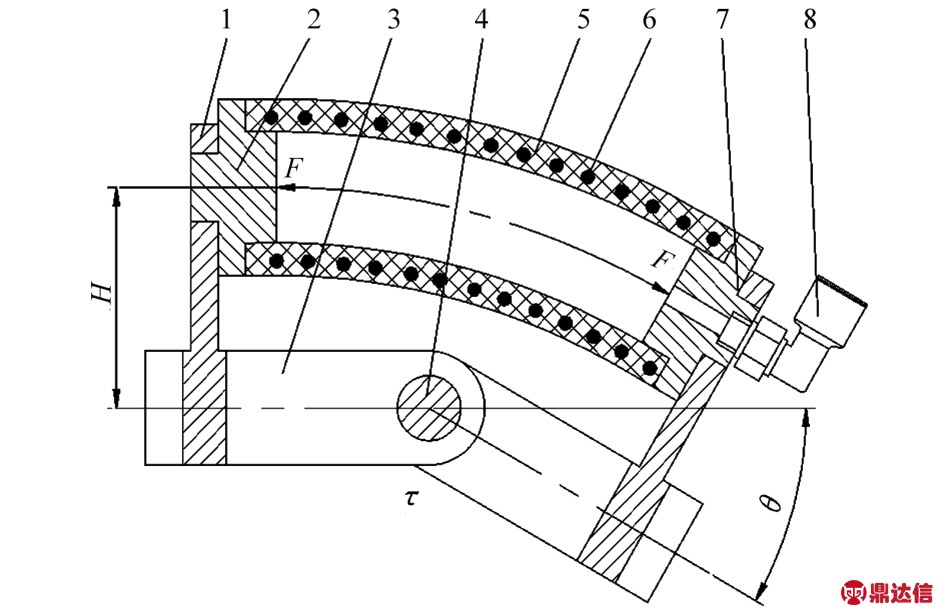
图2 弯曲关节结构图
Fig.2 Bending joint based on FPA
1.联接件 2.左端盖 3.连杆 4.转轴 5.橡胶管 6.螺旋钢丝 7.右端盖 8.进气接头
通过静力学分析可得FPA内腔压力p与关节弯曲角度θ的关系式,即关节的转角静态模型[9]

式中 Lb——橡胶管初始长度
rb——橡胶管平均半径
tb——橡胶管初始厚度
Eb——橡胶管弹性模量
H——初始状态时关节转轴中心线与橡胶管中心线之间的距离
patm——大气压力
在压力p的作用下弯曲关节产生角度为θ,此时在外界约束的限制下关节连杆不再继续转动,同时进一步增加FPA内腔压力到p+Δp,Δp即为压力增加值,FPA的输出力为推力F,该力对关节转轴中心的力矩τ即为弯曲关节的输出力矩[9]
2.2 3自由度手指机械结构
气动柔性手指由3个气动柔性弯曲关节串联而成,如图3所示,为平面3自由度结构。通过调整3个关节的弯曲角,不仅可使手指指端达到指定位置,而且还可控制指端与物体接触的法向角度,从而较为精确地控制接触点的法向力和切向力,有利于对物体施加合适的抓持力;另一方面,考虑到整个手指的质量,没有设计侧摆关节。
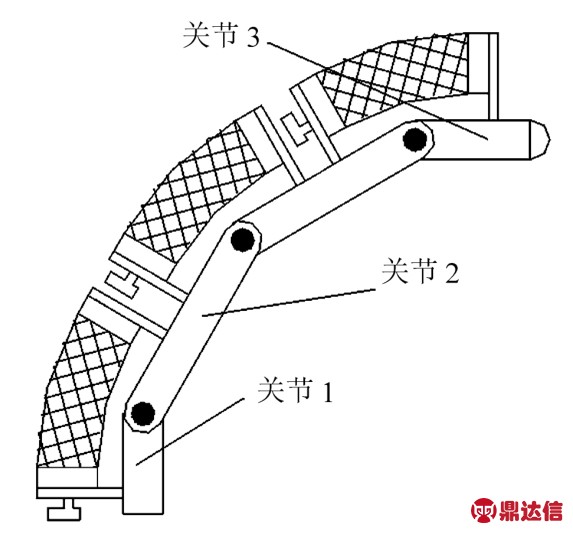
图3 3自由度手指结构示意图
Fig.3 Structure of 3-DOF fingers
2.3 手指受力分析
气动柔性手指由3个弯曲关节串联而成。为了求解手指指节接触点所受到的法向力和摩擦力与关节FPA输出力之间的关系,以各个手指关节轴为转动中心,建立力矩平衡方程。为了便于计算,对各变量作如下定义:Mi为作用于各个指节的法向力和摩擦力对第i个关节所产生的阻力矩,N·mm,i=1,2,3;τi为关节i的输出力矩,N·mm,i=1,2,3;右侧手指的各个关节转动中心分别为O1、O2、O3;手指的关节角分别为θ1、θ2、θ3;各指节的长度lO1O2=L1、lO2O3=L2、lO3A=L3;手指各个指节和物体间的接触点C1、C2、C3的法向力分别为FN1、FN2、FN3;摩擦力分别为Fμ1、Ff2、Fμ3;Si为第i指节和物体的接触点Ci与关节转动中心Oi之间的距离,mm,i=1,2,3;Hi为第i个驱动器轴向中心线到关节转动中心Oi的距离,mm,i=1,2,3;如图4所示。
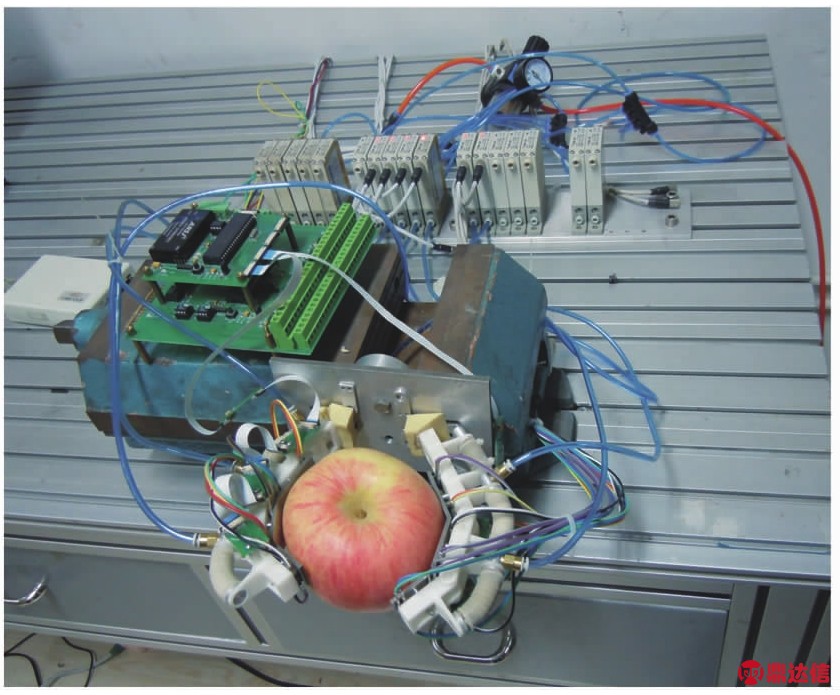
图4 手指多点输出力分析
Fig.4 Analysis of output force of finger
首先建立各个关节FPA的输出力与关节输出力矩之间的关系
然后建立各个关节的指节的法向力和摩擦力与关节受到的阻力矩之间的关系,可得

根据关节转轴力矩平衡原则,可得
为了进一步分析接触点法向力和摩擦力对关节阻力矩的影响,对式(12)进行拆分。接触点法向力与关节阻力矩之间的关系表示为
式中 MNi——作用于各个指节的法向力对第i个关节所产生的阻力矩,N·mm,i=1,2,3
接触点摩擦力与关节阻力矩之间的关系为
式中 Mμi——作用于各个指节的摩擦力对第i个关节所产生的阻力矩,N·mm,i=1,2,3
2.4 接触点摩擦力评估
将接触点的切向摩擦力约束看作被动力约束,相应的摩擦力就是被动力,其力值的大小和方向无法通过主动控制实现,也就难以规划,但可以间接评估其大小。从式(15)可解出指节3和指节2上所受的摩擦力
另外,从手指结构上可以看出,指节1上的摩擦力Fμ1无法通过关节FPA中的气压变化测出,事实上该摩擦力由指节1上的固定端来承受。
3 接触点法向力及其位置测量
人手对目标物体进行包络抓持时,主要是通过手指与手掌上触觉神经末梢感知,大脑根据感知信息判断是否实现了稳定抓持。多指机械手的手指和手掌与目标物体有多个接触点,在实际控制多指灵巧手实现包络抓持时,需要实时了解接触点与目标物体之间的相互作用力,以更好地判断是否达到稳定。
将包络抓取接触点的法向力作为主动力,对各个法向力进行闭环控制。为了测量手指指节受到的法向力,手指指节分成两部分,如图5所示,一部分为固定指节,与两侧转动中心相连,两个微型触力传感器固定在手指指节的两端;另一部分为活动指节,通过两个圆柱销与固定指节相连,为了降低圆柱销与固定指节之间的摩擦力,圆柱销表面进行抛光处理。
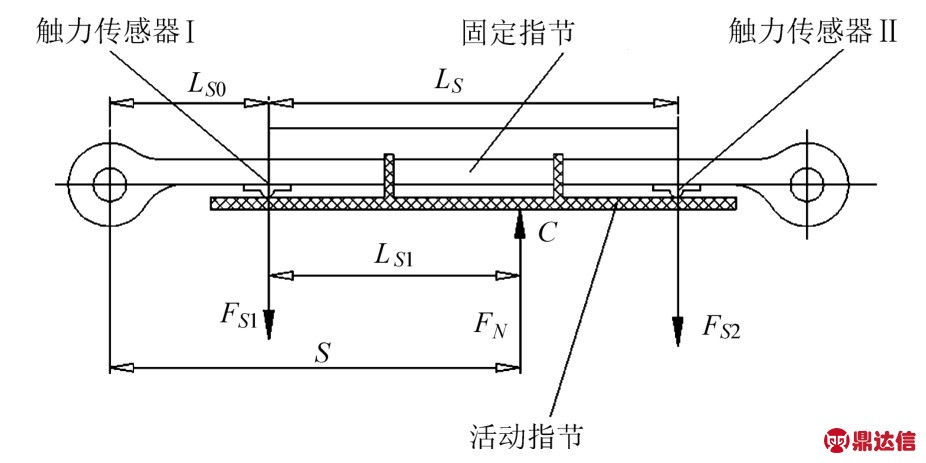
图5 指节法向力测量原理图
Fig.5 Schematic diagram of measure of positive pressure on knuckle
若忽略圆柱销与固定指节之间的摩擦力,指节所受力FN等于触力传感器Ⅰ和触力传感器Ⅱ之和
式中 FS1、FS2——指节安装的触力传感器Ⅰ、Ⅱ受到的力,N
根据杠杆原理可得关节转动中心与指节受力点C之间的距离
式中 LS——触力传感器之间的距离,mm
LS0——关节转动中心与触力传感器Ⅰ之间的距离,mm
LS1——触力传感器Ⅰ与指节受力点C之间的距离,mm
4 包络抓持接触点法向力控制
气动柔性手指与目标物体之间有6个接触点,并且抓取过程始终保持有6个接触点与物体相接触,将接触点的切向摩擦力约束看作被动力约束,将接触点的法向力约束作为主动力约束,对各个接触点都实施法向力控制,通过测定各个接触点的位置及法向力,就可以直接控制各个接触点处法向力,而法向力的控制通过主动控制关节FPA中的气压实现。
4.1 控制算法
包络抓持接触点法向力控制原理为:根据式(7)可得各个接触点法向力的期望值FNd,根据式(8)、(9)和(14)可得相对应的手指各关节FPA的压力增值ΔpNd。
实时采集各个关节角度、FPA中的压力及接触点法向力,根据式(16)和(17)对各点摩擦力进行评估,对摩擦力进行实时补偿。
为了抑制过调量,对压力反馈信号进行微分处理,作为一种反馈补偿环节,它属于超前校正;同时,为了消除压力检测信号中包含的高频噪声,对压力微分信号进行数字滤波。压力微分信号和压力反馈信号叠加作为反馈信号,补偿增益K0的值越大,抑制过调的效果越明显,但过分增大K0值时,响应达到目标值的延迟时间会增加。其控制原理结构框图如图6所示。
4.2 试验与分析
为了验证提出的接触点法向力控制策略的有效性,搭建指节法向力试验系统,如图7所示,其中电气比例阀ITV0050-3BS(日本SMC)可以在调压范围内连续调节出口压力,用于直接控制进入FPA内腔的压缩气体压力,并附带压力传感器可及时检测并反馈压力,工控机通过研华公司生产的PCL812板卡实现压力采集和压力控制。用于测量弯曲关节转角的角位移传感器AS5045(奥地利austriamicrosystems公司)是一种无接触式磁旋转编码器,它与弯曲关节不接触,二者之间无阻尼作用,可以忽略传感器对弯曲关节本身的影响,测量的角度通过单片机系统以CAN总线方式传输给工控机。手指每个指节安装了2个触力传感器,用于测量指端输出力的大小和作用点位置,触力传感器采用美国霍尼韦尔公司生产的FSS1500NST。该传感器的特点是采用了已被证明可靠的传感技术,即使用专门设计的精制压敏电阻硅传感元件;小功率、无放大、无补偿的惠斯顿电桥电路设计可在力范围内提供内在稳定的mV输出,采用创新的弹性技术工艺和模制的工程塑料,使过力可达4.5/5.5 kg;不锈钢球提供了极佳的机械稳定性,它适应于各种应用场合[11]。气动柔性的手指结构参数如表1所示。
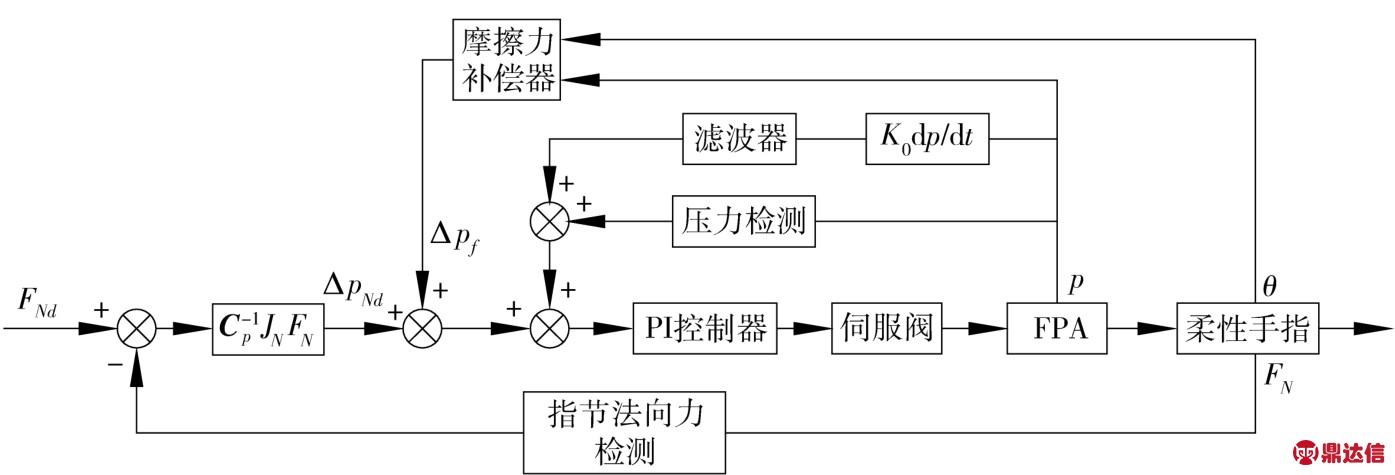
图6 指节法向力控制框图
Fig.6 Schematic diagram of force control of positive pressure on knuckle
图7 指节法向力试验原理图
Fig.7 Schematic diagram of experiment about positive pressure on knuckle
表1 手指结构参数
Tab.1 Parameters of finger

试验时,首先向各个关节的FPA中充入压缩气体,通过采集触力传感器的值来判断手指关节与目标物体是否发生接触,如果已经接触,记录当时FPA中的压力Δppos并判断接触点的位置,同时记录该关节的弯曲角度,试验照片如图8所示。以其中一个手指为例说明试验结果,由角度传感器可得手指各关节弯曲角θ1=14°、θ2=42°、θ3=52°,根据式(7)进行优化处理,可得FN1=3.50 N、FN2=3.34 N、FN3=3.14 N。根据指节2个触力传感器的实际测量值,代入式(19)可得S1=21 mm、S2=18 mm、S3=21 mm,根据各个接触点法向力的期望值,通过式(14)计算不考虑摩擦力时各个FPA所需的压力增值ΔpN,ΔpN1=0.077 6 MPa、ΔpN2=0.090 4 MPa、ΔpN3=0.058 1 MPa,按照上述控制策略对各个接触点法向力进行控制。
图8 手指包络抓持苹果试验照片
Fig.8 Photo of envelop grasping apple
其中一个手指指节各个接触点法向力如图9所示,从中可以看出,指节与目标物体接触之后,系统能够快速平稳的达到法向力期望值,法向力误差范围在5%以内,响应时间在1 s左右,可以说通过上述控制算法能够使得各个接触点法向力实际值接近于期望值。同时,可得手指各关节FPA中的压力增值Δp,如图10所示,由于接触点摩擦力和关节力矩的耦合作用,关节2和关节3 FPA中的气压增值远大于接触点法向力所需的气压增值,将试验数据代入式(18)和(19)可触点的摩擦力的评估值Fμ2=2.98 N、Fμ3=3.05 N。
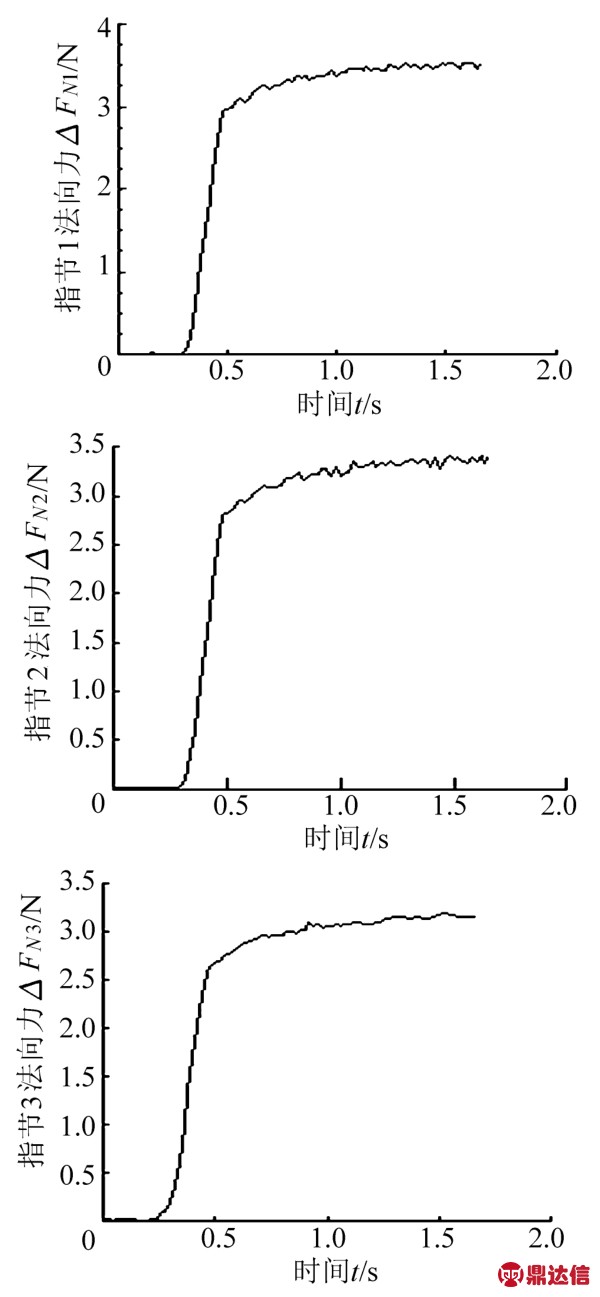
图9 包络抓持指节法向力试验结果
Fig.9 Experimental results of positive pressure on knuckle of grasping model
5 结论
(1)气动手指结构简单。该气动手指具有3个自由度,运动灵活,采用直接驱动方式,不需要外加复杂的腱(或绳索)传动、变速机构,避免了依靠摩擦滑动传递运动和力,提高了效率。
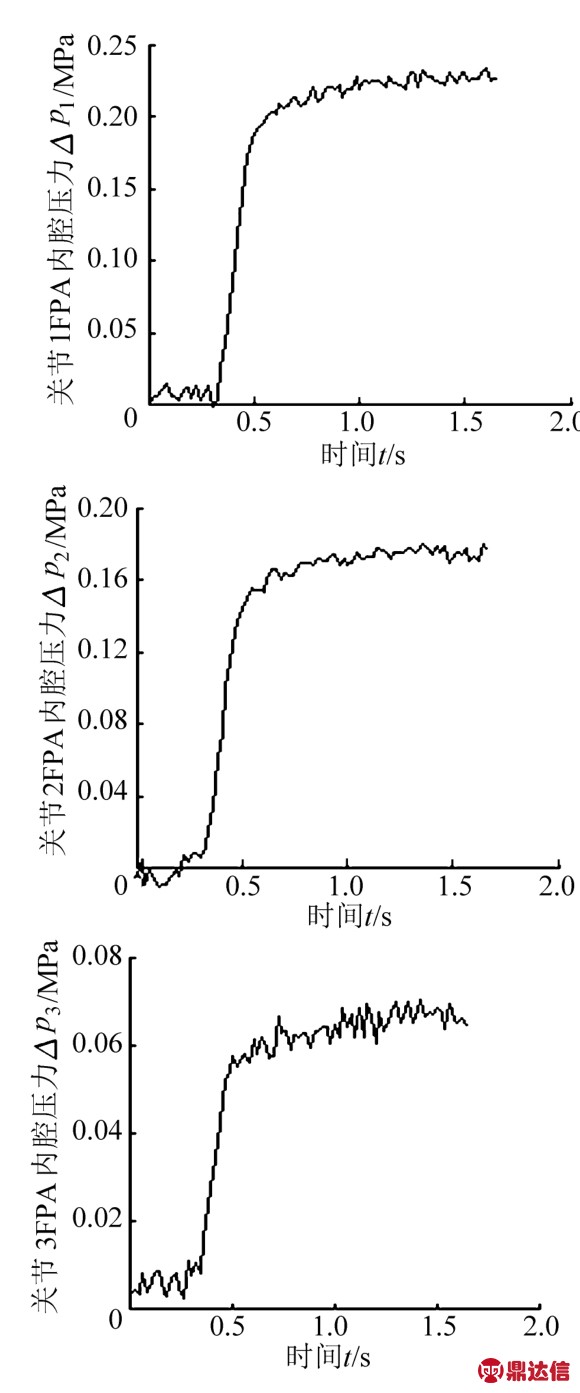
图10 FPA内腔压力试验结果
Fig.10 Experimental results of pressure in FPA
(2)输出力可控好。通过控制各个关节FPA中的气压增值,手指指节就可以得到所需的输出力。调节驱动器FPA中的气压,可以实现手指对物体的“软夹持”(以适当的力夹持)、“刚夹持”(以最大的力夹持)。同样,低气压可以用来抓取轻的物体,高气压可以用来抓取重的物体。
(3)由该手指组成的机械手适用于对柔顺性和夹持力要求较高的场合,如农业果实采摘、精密脆弱物件的抓取。


