
摘要:针对现有手指康复器在柔顺性、适用性和安全性方面存在的不足,基于气动柔性驱动器(FPA)设计了一种气动柔性手指康复器,以采用压缩气体驱动并以橡胶材料为主体设计的基于FPA的柔性弯曲关节代替传统的纯机械式结构。根据手指康复器仿生康复的任务要求,设计具有三大模块的控制系统:模式识别模块负责通过采集和分析手指表面肌电信号(sEMG)对主体的动作意图进行识别,并生成康复运动训练方案;角度反馈模块采用AS5045芯片实时检测康复器运动状态并将数据信息反馈至主控制器;主控制模块控制上述训练方案和康复器运动状态实时反馈信号以驱动康复器完成运动训练。实验结果表明,康复器两个关节弯曲期望值为15°和30°时的稳态误差小于0.6°,提出的控制系统能很好地完成sEMG的识别、康复器运动信息检测与反馈和康复训练任务,证明了手指康复器及其控制系统是可行的、有效的。
关键词:手指康复器;气动柔性驱动器;表面肌电信号;神经网络
0 引言
人手是人类日常生活中使用频率最高的肢体部位,因意外导致的或其他疾病引发的手部运动功能缺失及其并发症的发病率一直居高不下。人手功能缺失后需要借助器械进行被动康复训练,以达到最佳的康复效果。
目前国内外已有多种手部康复器出现,如:Sasaki等[1]利用类似于McKibben型气动人工肌肉(PMA)的气体柔性驱动器研制了一种用于手腕运动功能恢复的装置ASSIST;张立勋等[2]公开了一种采用机械连杆机构和电机驱动的手指运动训练的装置;Fu等[3-4]采用电机驱动和连杆机构研制了一种连续被动活动(CPM)手指康复器。
就手部康复器的发展现状来看,还存在以下问题:①现有的康复器没有将人脑意识、人类手指的自然运动规律融合进康复器的运动控制中,对患者的运动训练效果不佳;②不能针对患者的单个手指或指关节进行康复训练,适用性差;③采用刚性机械结构和电机驱动的方式,而刚性机械结构导致了康复器的整体结构复杂,不易拆装,考虑到安全性等问题,电机驱动对伺服电机和控制器的要求较高,因此,成本也相对较高。
因此,本文提出将气动柔性驱动器(flexible pneumatic acutuator,FPA)[5-6]引 入 到康 复 器 的结构设计中,代替传统的连杆式机械结构。同时,将 表 面 肌 电 信 号 (surface eletroMyo singal,sEMG)引入到控制系统中,并结合控制主体的运动意图与实时反馈的位置信号,使手指康复器的康复训练接近正常手指运动形式,提高康复效率。同时,进行初步的康复运动训练实验,以验证提出的手指康复器在实际应用中的可行性。
1 基于FPA的手指康复器结构
1.1 气动柔性驱动器
FPA是本课题组提出的一种新型气动柔性驱动器。FPA的主要部分是弹性橡胶管,橡胶管壁内嵌入螺旋弹簧,橡胶管两端与端盖密封连接,其中一端的端盖上安装管接头,压缩气体可以从这个管接头进入FPA内腔。当压缩气体从管接头充入FPA内部时,在气体压力和螺旋弹簧的作用下,圆柱形橡胶管拉伸变长,整个结构表现为轴向伸长;当驱动器内部气体压力减小时,在橡胶管及螺旋弹簧的弹性作用下,整个结构收缩变短,直至恢复原状。FPA结构尺寸比典型的McKibben型PMA[7-10]结构尺寸要小得多,在本项目研究中,根据人类手指尺寸,可以设置直径为8~20mm。
1.2 手指康复器的工作原理
手指康复器的单指结构如图1所示。将手指康复器戴在患者的待康复手指上,并通过粘扣和手掌固定结构把康复器固定在患者的手背上方,使康复器的两个FPA分别处于手指的近掌指节和中指节的相应位置,通过通气管分别向两个FPA内腔充入压缩气体,驱动弯曲关节作弯曲运动,如图2所示,从而迫使手指也发生相应的弯曲运动。通过控制通气管内压缩气体的压力,可以得到不同角度、不同关节组合的运动形式,对不同情况的手指进行被动式康复运动训练。由于手指康复器的内腔紧贴手指表面,同时可利用粘扣扣紧,使手指康复器和患者手指成为一体,即保证了患者手指与康复器之间弯曲动作的一致性,又确保了康复器尺寸的可调节性。
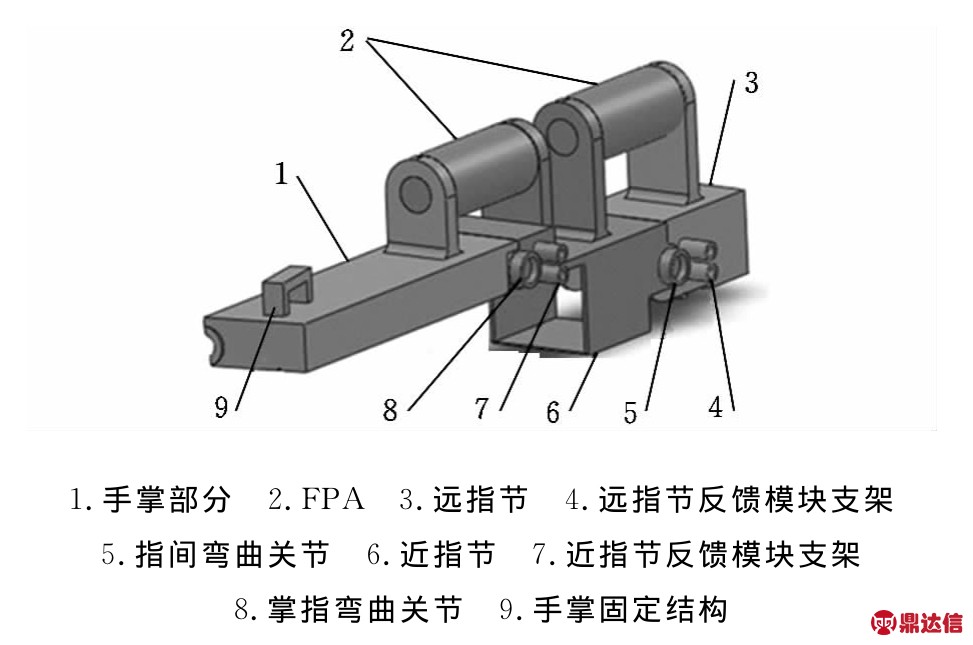
图1 手指康复器单指结构
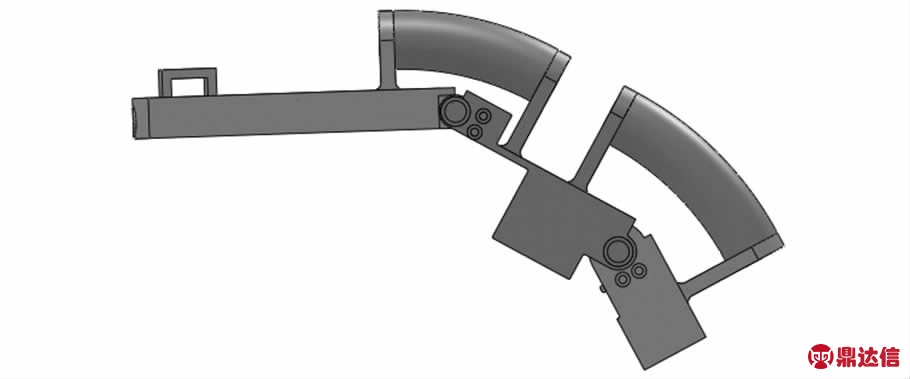
图2 单指弯曲
2 手指康复器控制系统
手指康复器的控制系统主要包括模式识别模块、主控制模块以及角度反馈模块3个模块,如图3所示。
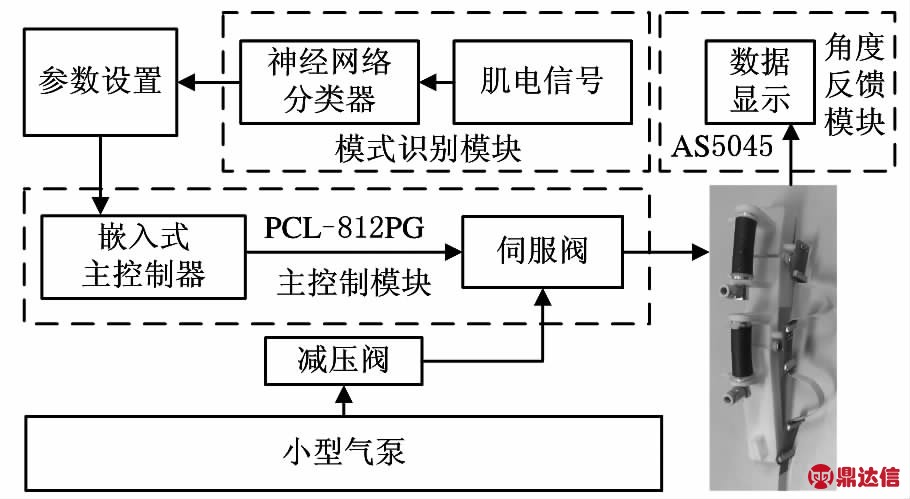
图3 控制系统框架图
模式识别模块的作用是构建神经网络识别器,将采集到的表面肌电信号进行识别分类,输出结果,并在交互界面显示。主控制模块的主要功能是控制数据采集卡采集上一模块的识别结果,并控制电气比例阀输出不同的气压值,从而控制手指康复器。角度反馈模块则负责将手指康复器的稳定弯曲角度反馈至主控制器,同时显示在交互界面上。
2.1 模式识别模块
几十年来,模式识别技术研究取得了大量的成果,尤其是神经网络模式识别的出现。神经网络模式识别方法的一个重要特点就是它能够有效地解决很多非线性问题,在实际应用中,无论是应用的深度,还是广度都远远超过传统模式识别[11]。BP算法是一种常用的神经网络算法,其学习目的是利用网络的实际输出与期望输出之间的误差来修改其权值,使实际输出与期望输出尽可能地接近,即使输出层的误差平方和达到最小。通过连续不断地在相对于误差函数斜率下降的方向上计算网络权值和偏差的变化而逐渐逼近目标,每一次权值和偏差的变化都与网络误差的影响成正比,并以反向传播的方式传递到每一层[12]。
根据单指运动康复器的具体需求,在MATLAB编译环境下设计神经网络模式识别模块,并开发Delphi程序完成对MATLAB程序的调用,其主要参数设置如下:
2.2 主控制模块
主控制模块是以研华PCL-812PG数据采集卡为核心,同时利用Delphi7开发可视化人机交互界面,其原理如下:高速数据采集卡通过两路D/A输出控制电-气压力比例阀的电压信号,从而改变康复手指两个FPA的内腔气压,实现其弯曲运动;同时数据采集卡通过两路A/D转换通道对电-气压力比例阀压力反馈信号进行检测;弯曲角度通过角度反馈模块进行检测反馈,角度值通过DSP单片机控制卡以CAN总线方式传输给工控机。
2.3 角度反馈模块
角度反馈模块主要包括主控板卡、FPC数据线以及载有AS5045芯片的PCB电路板,其中主控板块与工控机之间采用CAN总线通信方式。AS5045芯片可以用于精确测量360°范围内的角度,是一个完整的片上系统,单个封装集成了霍尔元件,模拟前端以及数据信号处理功能。测量角度时,只需简单地在芯片中心的上方或下方放置1个旋转双极磁铁即可,如图4所示,绝对的角度测量方式可即时指示磁铁角度位置。
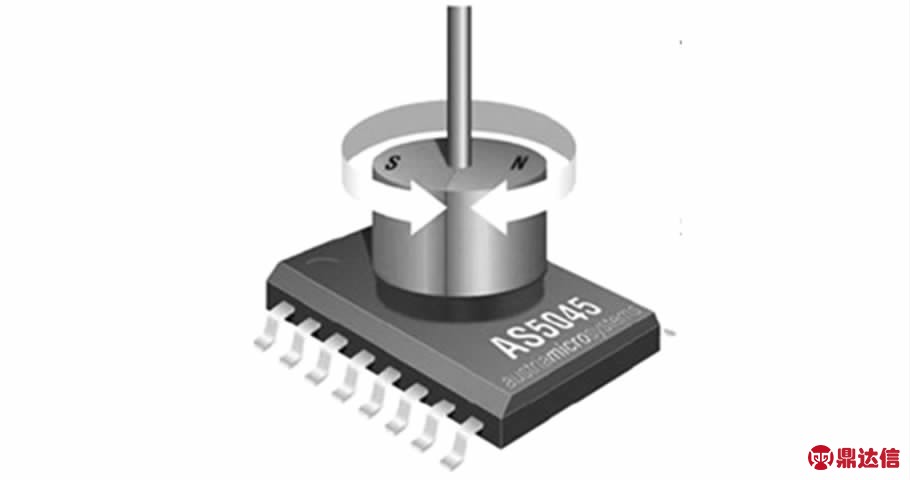
图4 AS5045芯片和磁铁的典型布置方式
根据测量原理检测康复手指每个关节的位置信息时,只需在关节转轴上放置一个旋转磁铁,且该旋转磁铁需平行置于AS5045芯片的上方。以弯曲关节为例,安装示意图见图5。由于AS5045芯片是直接数字信号输出,可以与单片机系统直接相连,不需要模拟放大等复杂电路,故关节位置检测电路较为简单[13]。
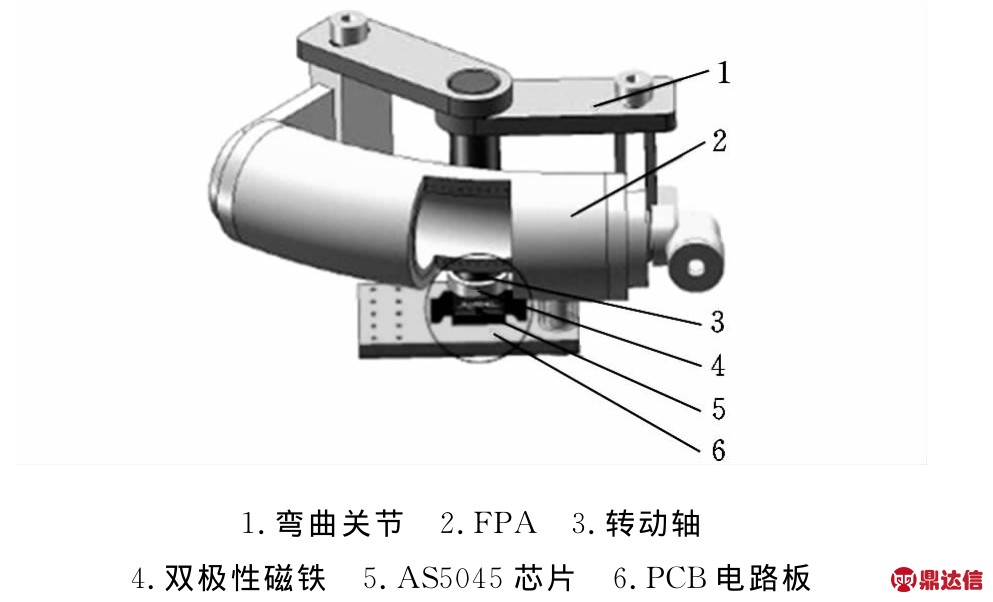
图5 关节角度测量示意图
3 实验分析
3.1 理论基础
本文建立了弯曲关节的静态模型,并对弯曲关节的一端端盖进行力矩分析,得出当外力矩M=0时,弯曲角度与关节内腔气体压力之间的关系式[14]:
式中,Lb为弯曲关节橡胶管初始长度;rb为弯曲关节橡胶管平均半径;tb为弯曲关节橡胶管初始壁厚;Eb为弯曲关节橡胶管弹性模量;Δp为弯曲关节橡胶管内腔压力变化值,Δp=p-patm;p为气泵输出气压;patm为大气压力。
由弯曲关节的弯曲机理可知,弯曲关节的内腔气压p是关节弯曲角度θ产生的动因,根据两者的数学关系式,绘制p-θ关系曲线图,见图6,弯曲关节各项参数见表1,表中弯曲关节的弹性模量Eb取值为理想情况下的橡胶管弹性模量。
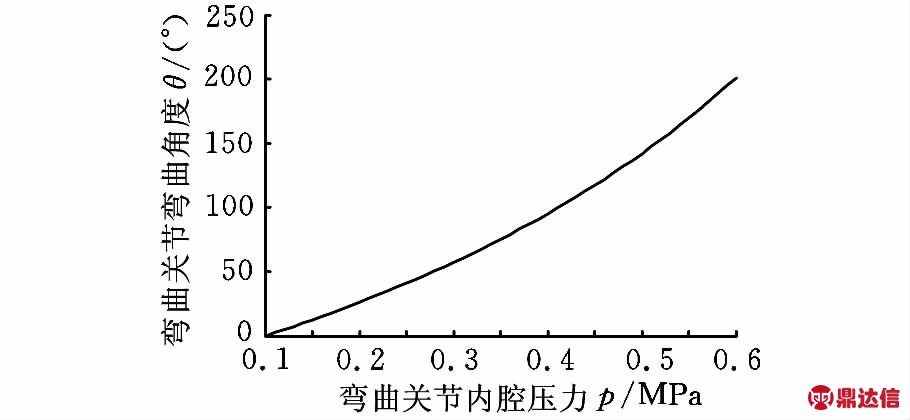
图6 p-θ关系曲线图
表1 弯曲关节参数
如图6所示,FPA的p-θ关系曲线平滑,弯曲过程稳定,因而,基于FPA设计的手指康复器的弯曲过程也相对稳定。所以在验证系统的控制精度时,只需对手指康复器的静态误差进行分析研究,其动态误差由FPA的特性决定。
3.2 实验目的
本实验分为三部分:第一部分是表面肌电信号的识别率实验,这对于手指康复器整体控制有着决定性作用;第二部分是随机角度弯曲实验,目的是解决角度分配问题;第三部分是控制系统整体弯曲精度实验,这直接关系到手指康复器控制系统的实际应用。
3.3 模式识别模块识别率实验
本实验以手指康复器控制系统中模式识别模块为实验对象,实验主要步骤如下:将已知的表面肌电信号输入模式识别模块的神经网络分类器中,通过实际输出量与预期输出量的偏差值来确定模式识别模块的识别率。将相对偏差在1%之内,即实际输出量与期望输出量的偏差值在[0,0.01]之内的输出结果定义为识别成功。
本部分实验内容和实验条件在文献[15]中有详细介绍,本文只给出实验结果:12组实验信号的24个输出量中,有18个输出量偏差为0,6个存在一定的偏差,其中一个偏差较大为0.03,其余均在[0.0002,0.0013]之内。实验结果说明,手指康复器控制系统的模式识别模块识别成功率达到95%,能够很好地完成对不同手指动作表面肌电信号的识别任务[15]。
3.4 随机角度弯曲实验
实验的目的是得出手指康复器弯曲时,两个柔性弯曲关节弯曲角度之间的比例关系,解决两个弯曲关节弯曲角度分配的问题。实验方案如下:在0~0.4MPa的气压范围内,通过控制界面向数据采集卡发送控制命令,分别输出4次不同电压,控制电气比例阀输出0.1MPa、0.2MPa、0.3MPa、0.4MPa 4种气压各10组,同时通过AS5045位置传感器反馈控制器,将角度显示在控制界面上。通过这个方式进行角度测试,图7是测试得出的10组弯曲数据的平均值对比曲线。
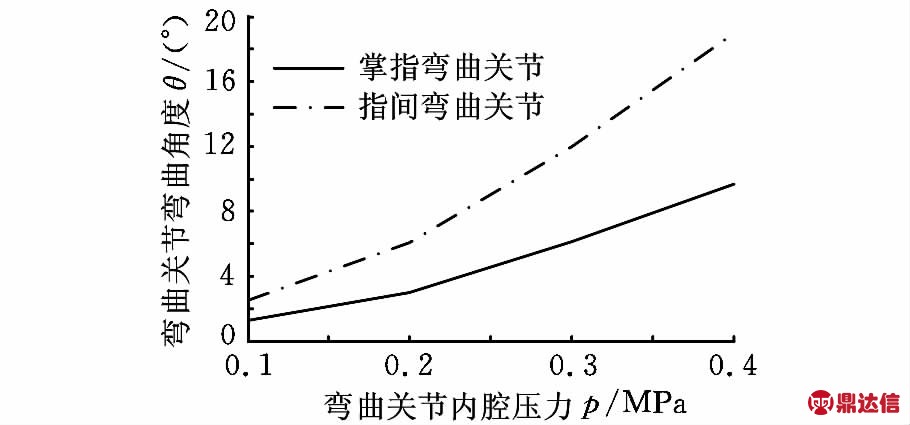
图7 弯曲角度对比曲线
如图7所示,当手指康复器的两个柔性弯曲关节同时作弯曲动作时,掌指弯曲关节和指间弯曲关节的弯曲角度比约为1∶2。考虑整数比更利于角度的分配,将掌指弯曲关节和指间弯曲关节的弯曲角度比定为1∶2。
3.5 控制系统精度实验
控制系统精度实验以手指康复器上两个相同结构的气动柔性弯曲关节为对象,采用上位机通过数据采集卡控制输出气压,使弯曲关节弯曲不同角度,再根据位置数据返回实际弯曲角度值。实验的目的是测试手指康复器控制系统控制精度。
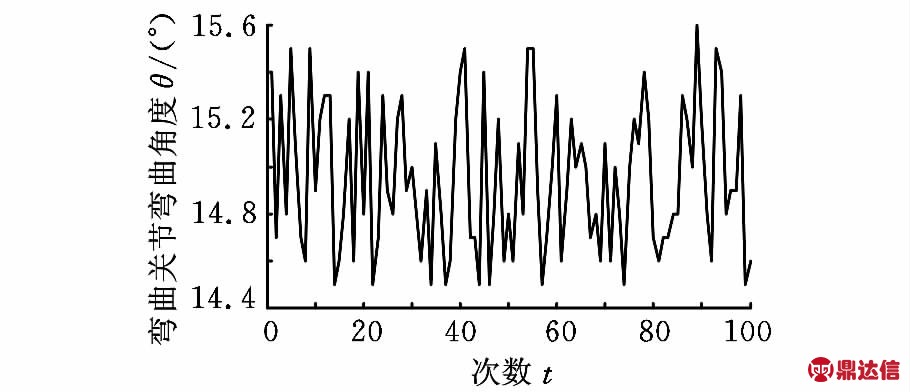
实验方案如下:将100组手指弯曲45°的表面肌电信号导入手指康复器控制系统,在模式识别模块成功识别信号后,通过D/A输出调整电气比例阀的电压信号,控制近指和远指柔性弯曲关节分别弯曲15°和30°,从而实现康复器的45°弯曲,同时通过角度反馈模块将弯曲关节的实际弯曲角度反馈至上位机,显示在监控界面上。图8、图9是成功识别手指弯曲信号后,掌指弯曲关节和指间弯曲关节的实际弯曲角度曲线图。
图8 掌指弯曲关节弯曲数据
通过实验数据分析对比可以得出如下结论:
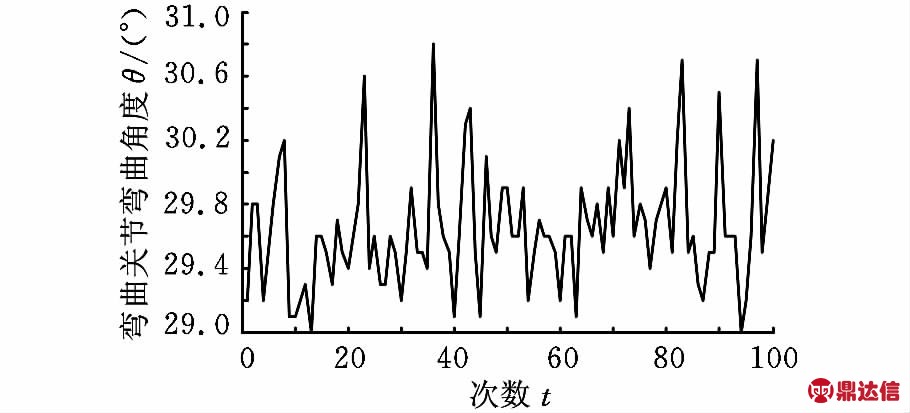
图9 指间弯曲关节弯曲数据
(1)在100次的弯曲实验中,掌指弯曲关节实际弯曲角度与理论值的最大绝对误差为0.6°,最大相对误差为4%,出现次数为1次,而绝对误差为0.5°(相对误差为3.33%)的出现次数为15次,其余84次弯曲的绝对误差都在0.4°(相对误差为2.67%)之内。
(2)在同样的100次弯曲实验中,指间弯曲关节实际弯曲角度与理论值的最大绝对误差为1.0°,最大相对误差为3.33%,出现次数为2次,而绝对误差在0.6°(相对误差为2%)之内的次数仅为81次,其余17次的绝对误差均在0.7°(相对误差为2.33%)至0.9°(相对误差为3%)之间。
(3)从弯曲关节的稳定误差来看,掌指弯曲关节出现误差为0.4°之内的次数为84次,而指间弯曲关节出现误差在0.6°之内的次数是81次,出现概率均在80%以上;因此,可以认为掌指弯曲关节和指间弯曲关节的稳定误差分别为0.4°和0.6°,基本满足实际应用的精度要求。
分析柔性弯曲关节在弯曲时产生偏差的原因,主要有以下几点:①手指康复器运动时,由于机械结构之间摩擦等因素产生的偏差;②两个弯曲关节联动时,由于互相干扰产生的偏差;③角度反馈模块测量角度并反馈过程中产生的偏差;④电气比例阀在向弯曲关节输出气压时,产生关节抖动引起的偏差。
3.6 局限性
相比传统的刚性机械结构手指康复器,由于引入了表面肌电信号和气动柔性弯曲关节,使气动柔性手指运动康复器在弯曲过程的柔性和控制策略的仿生性等方面有了很大地提升;但同时,也不可避免地受到了柔性关节结构的限制,无法实现大角度的弯曲。如何在保留柔性关节结构优点的同时,解决手指康复器的大角度弯曲问题,是今后研究的主要方向之一。
4 结论
(1)将气动柔性弯曲关节和表面肌电信号分别引入手指康复器的结构和控制系统设计中,设计了以FPA为基础的单指运动康复器;同时根据手指康复器的具体需求,设计了由模式识别、位置反馈和主控制3个模块组成的康复器控制系统。
(2)实验结果表明:掌指弯曲关节与指间弯曲关节的稳定误差均在0.6°之内;整体控制系统设计合理,在弯曲控制精度方面,完全满足康复器实际应用的需求。


