
摘 要:光栅光谱仪作为研究太阳辐射的重要设备之一,其波长扫描机构的精度很大程度上决定了最终测量结果的准确性。从光机系统的光栅参量误差和机械结构误差两方面入手,对丝杠摆杆波长扫描机构展开综合精度分析,依据凹面光栅色散原理,推导出波长λ与摆杆末端沿丝杠方向位移x,摆杆长度l,光栅常数g和入射光线与出射光线夹角半值δ之间的关系。再对等式求导,依据误差叠加原理,计算出在红外工作波段650 nm~2 400 nm范围内,其波长定标误差应不超过±1.227 nm。在实验样机上进行验证,以汞灯为光源拟合出误差与波长的关系曲线,并以氦氖激光器为光源加以验证。实验结果证明了理论计算的正确性,该分析方法为双光栅光谱仪零部件精度指标的确定提供了依据。
关键词:精度分析;光栅光谱仪;波长定标;正弦机构
引言
光栅光谱仪是研究太阳辐射的重要设备之一,其测量结果的准确性很大程度上取决于波长扫描机构的精度。在先前的研究中,已有成熟的凸轮摆杆波长扫描机构应用到星载光学载荷中。然而新项目中,客户对波长扫描精度和重复性提出了更高的要求。以红外分系统为例,波长扫描重复性要求为0.05 nm,对应的光栅最小转角为7.5″,只有当光栅刻线密度增至480 g/mm时,凸轮摆杆机构方可满足波长扫描重复性要求。货架产品的光栅刻线数为300 g/mm,480 g/mm的光栅订制费用将急剧增加,故凸轮摆杆机构并不适用于新项目。
基于以上分析,拟采用由丝杠、滑块、摆杆、步进电机、光栅转轴等部件组成的丝杠摆杆波长扫描机构代替原有机构。为验证新方案的可行性,并为各零部件精度指标的确定提供理论依据,需分析各参数对波长测量精度的影响。
依据凹面光栅的色散原理,结合丝杠摆杆波长扫描机构的具体几何关系,推导出波长计算公式,并据此分析各参数对最终波长测量结果的影响。再依据误差叠加原理,计算出双光栅光谱仪光机系统的综合测量误差。相比较于以往单一的从光学指标入手进行凹面光栅像差分析[1-4],或从机械尺寸入手进行传动结构误差推算[5-8],这种直接从结果出发的新思路对误差来源的思考更为全面。
1 双光栅光谱仪工作原理
双光栅光谱仪工作原理如图1所示。光线从入射狭缝进入,依次经过第一组凹面光栅和平面镜反射后,通过中间狭缝,然后再依次经过第二组平面镜和凹面光栅反射,最终从出射狭缝射出进入探测器。
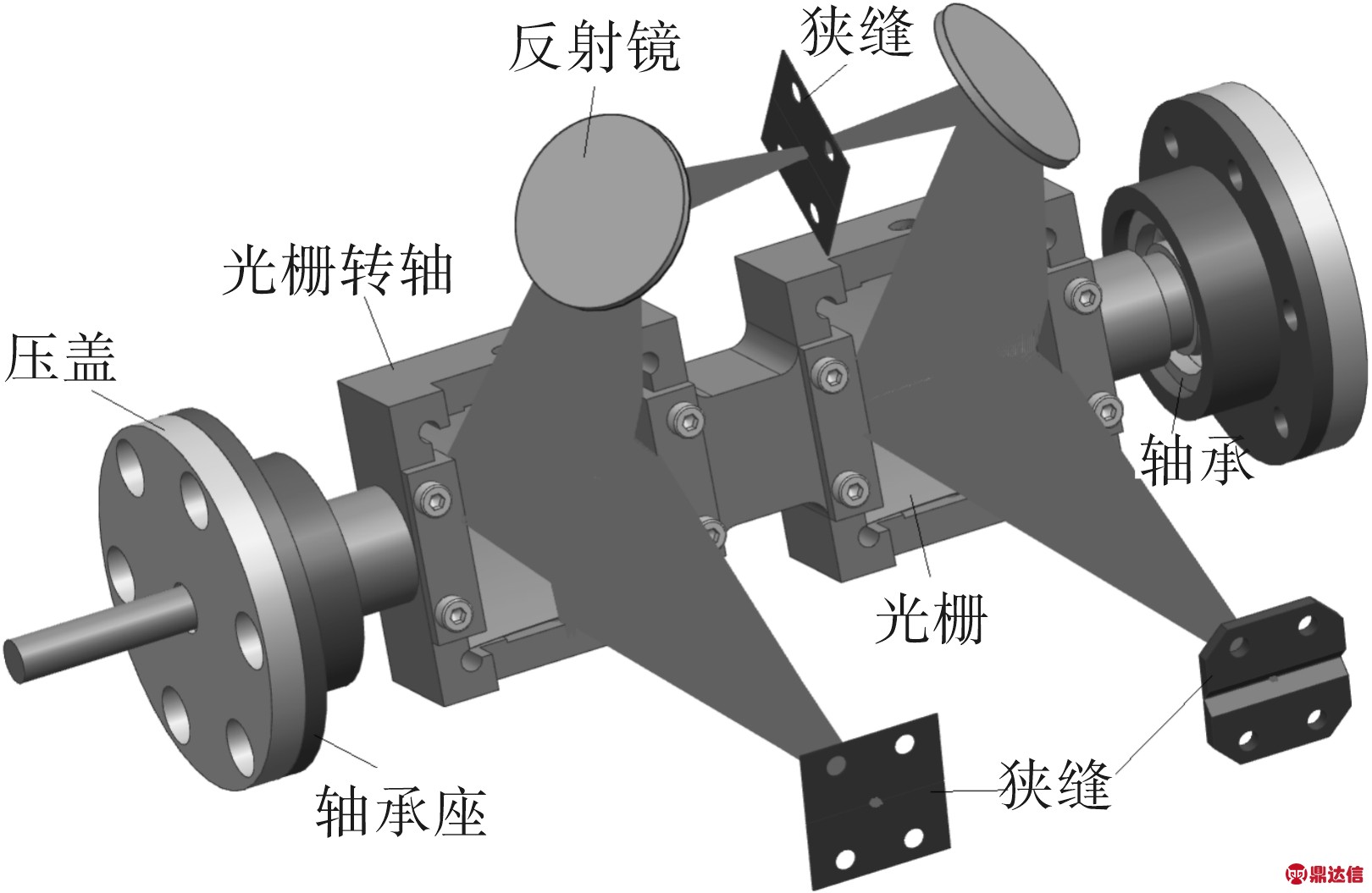
图1 光谱仪工作原理
Fig.1 Operational principle of spectrometer
凹面光栅色散原理与平面光栅类似,如图2所示。其中N为凹面光栅的法线;B为入射光线与衍射光线夹角的角平分线,入射角为i,衍射角为θ,入射光线与衍射光线的夹角为2δ,角平分线B与法线N的夹角为φ。
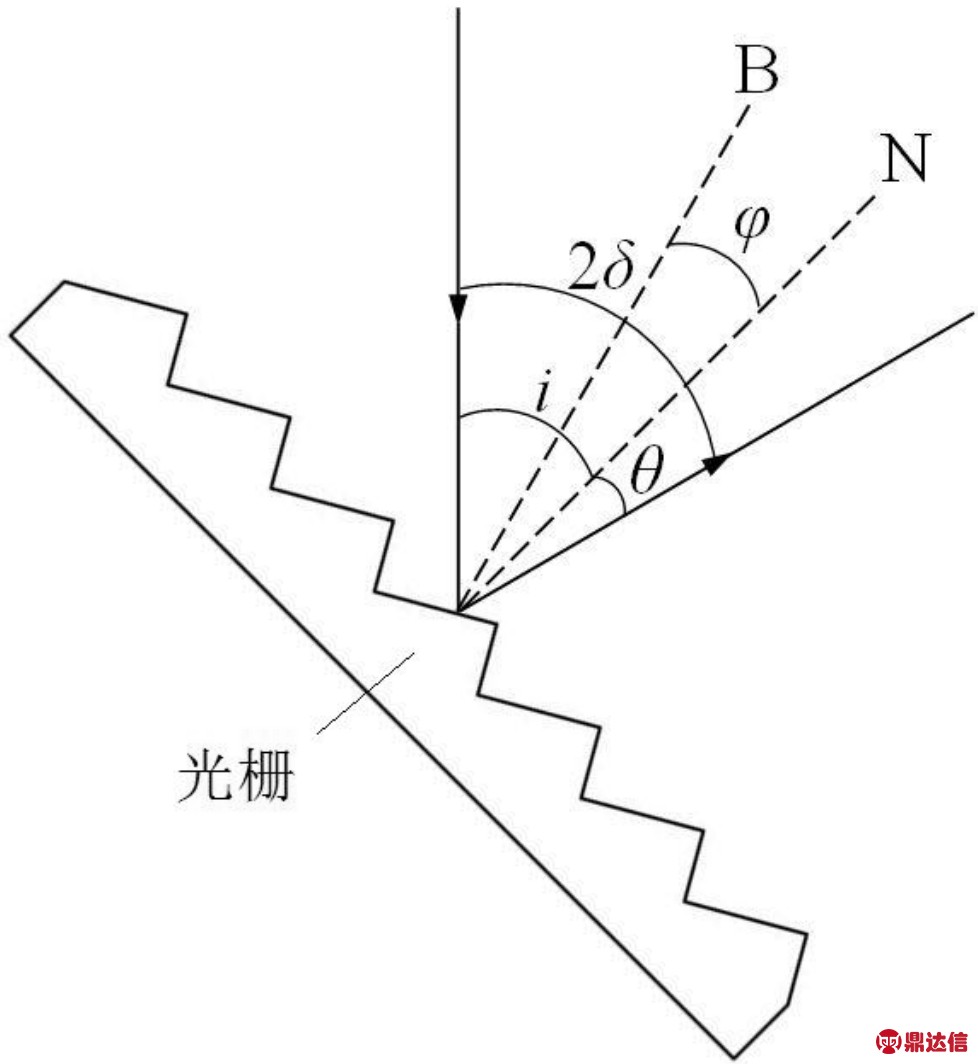
图2 光栅色散原理
Fig.2 Dispersive principle of concave grating
根据平面衍射光栅的色散公式,有:
g(sini-sinθ)=mλ
(1)
式中:m为光栅衍射级次;g为光栅常数。
根据图2几何关系,有:
(2)
将(2) 式代入(1) 式,得:
(3)
丝杠摆杆波长扫描机构的驱动原理如图3所示,步进电机驱动滑块在丝杠上前后移动。摆杆左端由弹簧拉紧,紧贴滑块表面移动,右端与光栅转轴固定,从而实现步进电机对凹面光栅转角的控制。波长扫描机构在装配时要求凹面光栅衍射面中心位于光栅转轴上,在扫描过程中,由于入射狭缝,出射狭缝和衍射面中心均已固定,故入射光线、衍射光线及其角平分线B均不随光栅转动,仅光栅法线N始终保持与光栅垂直。装配时,若保证滑块位于零位时,角平分线B与光栅法线N重合,则可保证在扫描过程中,两者夹角φ与光栅转角α始终相等。此时,由图3几何关系可得:
(4)
式中:l为摆杆长度;x为摆杆末端沿丝杠方向的位移。将(4) 式代入(3) 式,有:
(5)
图3 丝杠摆杆正弦机构
Fig.3 Sine mechanism driven by screw and swing
2 光机系统综合精度分析
双光栅光谱仪由3台结构相似,分别用于监测不同波段的光谱仪组成,每台光谱仪包含2个结构完全相同的通道,分别用于探测和定标。此外,每个光谱仪在研制过程中都应至少搭建原理样机和工程样机各一次,故光机系统的综合精度分析不应局限于某台搭建完毕的样机,而应针对其工作原理和机械结构展开分析,即计算过程中所有的系统误差都应考虑为基于相应加工精度和装配水平的未定系统误差。
双光栅光谱仪工作过程中考虑光栅的一级衍射,当m为1时,对(5)式两边求导,得:

(6)
由(6)式可知影响波长测量精度的因素有摆杆末端沿丝杠方向的位移误差dx,光栅常数误差dg,杆长误差dl和入射光线与衍射光线的夹角半值误差dδ。
将(6)式记为
dλ=dλ1+dλ2+dλ3+dλ4
(7)
2.1 摆杆末端沿丝杠方向的位移误差dx对波长定标结果λ的影响
由(6)式和(7)式可知:
(8)
摆杆末端沿丝杠方向的位移误差dx主要由五种因素导致:丝杠定位误差、丝杠零位误差、光栅转轴的安装误差、光栅转轴轴承的径向游隙和丝杠轴承的轴向游隙,其中前3项为基于零件加工精度和装配水平的未定系统误差,后2项为随机误差。
双光栅光谱仪所用丝杠的定位误差ep直接对应摆杆末端沿丝杠方向的位移误差dx,故由此项引入的误差dx1为
dx1=ep
(9)
如前文所述,当滑块位于零位时,角平分线B应与光栅法线N重合。为实现这一要求,装配时采用如下方案:首先将光栅转轴与摆杆之间的连接松开,并将滑块置于零位。然后控制步进电机推动滑块至某一已知波长对应的丝杠理论位置,再计算出射狭缝处能接收到该波长光信号时光栅的理论转角。制作该角度的标准斜块,用于支撑光栅,最后将摆杆和光栅转轴间加以固定。
在实际操作中,标准斜块存在加工误差,光栅也无法与斜块紧密贴合,故丝杠零位误差不可避免。若角平分线B与光栅法线N的初始夹角为β,则公式(4)变为

(10)
将(10) 式代入(3) 式,则有:
(11)
从(11) 式可以看出,波长λ与位移x不再满足(5) 式中的线性关系,即丝杠零位误差对波长测量精度和直线度均有影响。通过测量波长定标直线度来估计丝杠零位误差的大小,可控制由零位误差引入的dx2一般不超过由丝杠定位误差引入的dx1,即:
dx2=dx1
(12)
由于光栅转轴跨距较大,箱体上用于支撑转轴的通孔距离较远,加工时难以保证其具有良好的同轴度。故光栅转轴在安装过程中可能出现如图4中所示的倾斜。
图4 同轴度与位移误差的关系
Fig.4 Relationship between coaxial degree and displacement error
由于摆杆始终垂直于光栅转轴,故:
θ0=θ1
(13)
由几何关系可知,滑块位移x′与摆杆末端沿丝杠方向的位移x之间应满足如下关系:
x=x′·cosθ1=x′·cosθ0
(14)
由此引入的误差dx5可通过(17) 式计算。其中,滑块位移x′由步进电机转动步数推算:
dx3=x-x′=x′(cosθ0-1)
(15)
双光栅光谱仪光栅转轴由一对7000C角接触轴承支撑,其径向游隙ur会导致光栅转轴旋转过程中产生随机倾斜,ur的具体数值与轴承安装的松紧程度有关。当轴承间距为s时,结合(15) 式可知,此项引入的误差dx4应满足(16) 式:
dx4≤|x′(cosθ′-1)|=
(16)
丝杠两端由一对726轴承固定,其轴向游隙ua会导致丝杠产生整体随机位移,ua的具体数值与轴承安装的松紧程度有关,所引入的误差dx5满足(17) 式:
dx5≤|ua|
(17)
2.2 光栅常数误差dg对波长定标结果λ的影响
由(6)式和(7)式可知:

(18)
由(18) 式可知,光栅常数误差dg对波长定标结果λ的影响主要取决于所用光栅的光栅常数g及其加工误差dg。以光栅常数g为例,各波段光谱仪所用光栅的刻线数为300到2 400不等,故误差叠加时,该项应看作为一种未定系统误差。
2.3 入射光线与衍射光线夹角半值误差dδ对波长定标结果λ的影响
由(6)式和(7)式可知:
dλ3=-λtanδdδ
(19)
双光栅光谱仪使用精度为10″的水平仪和0.5″的经纬仪辅助装配,其Ebert角可精确达到设计值61.6°。采用上述精密装配方式,并在实际热控环境下进行工作,双光栅光谱仪Ebert角的实际值仅可能存在较小的随机误差[9-10]。
2.4 摆杆长度误差dl对波长定标结果λ的影响
由(6)式和(7)式可知:
(20)
滑块推动摆杆,驱动光栅转轴旋转,摆杆参数直接决定了滑块行程与光栅转角之间的对应关系。由(20) 式可知,摆杆长度误差dl对波长定标结果λ的影响主要取决于摆杆长度l及其加工误差dl。不同波段的双光栅光谱仪具有不同的摆杆长度设计值,且每根摆杆的实际加工误差dl也不尽相同,故误差叠加时,该项应看作为一种未定系统误差。
2.5 理论误差分析总结
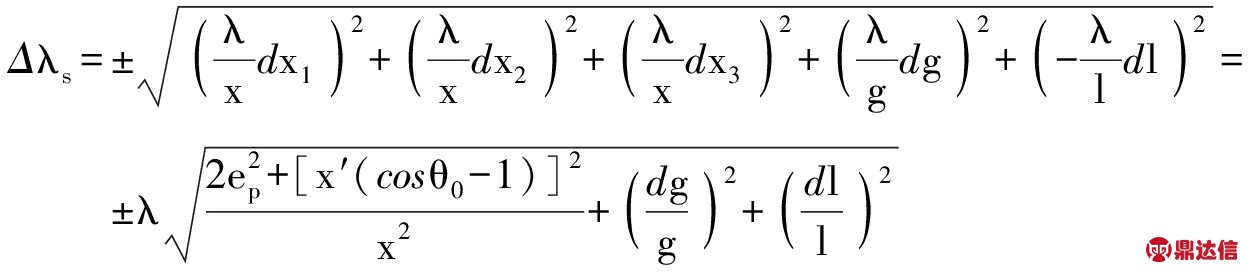
上面已将各影响因素依次进行了区分,考虑到各影响因素之间相互独立,可由(21) 式和(22) 式 分别计算双光栅光谱仪波长定标结果λ的未定系统误差Δλs和随机误差Δλr:
(21)

(22)
根据未定系统误差与随机误差的叠加原理,可依据(21) 式和(22) 式推算双光栅光谱仪的波长定标精度Δλ:


(23)
代入具体数据,可得在红外工作波段650 nm~2 400 nm范围内,波长测量误差理论最大值出现在波长2 400 nm处,最大值为±1.227 nm。
3 实验验证
双光栅光谱仪波长定标装置及其示意图如图5所示。由(1) 式可知,波长为λ的光波,其m级衍射可看作是波长为mλ光波的一级衍射,故利用已知波长的汞灯特征谱线的多级衍射能实现红外波段的波长定标和误差计算。
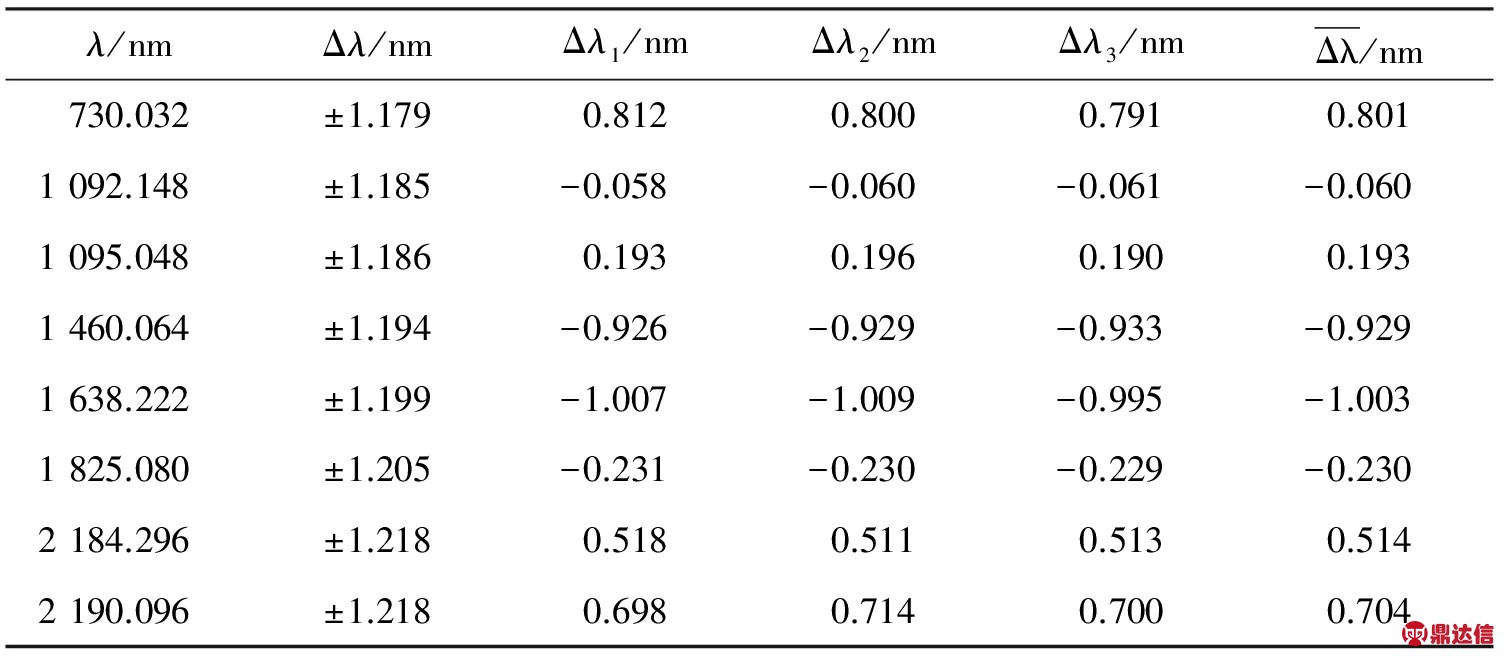
在进行波长定标时,选择汞灯作为光源,2次测量时分别用365 nm滤光片和540 nm滤光片选取特征波长的单色光,等效波长处波长定标精度的理论计算值和实测值如表1所示。在8个等效波长的3次独立测量中,其波长误差的实测值均在理论计算范围之内。
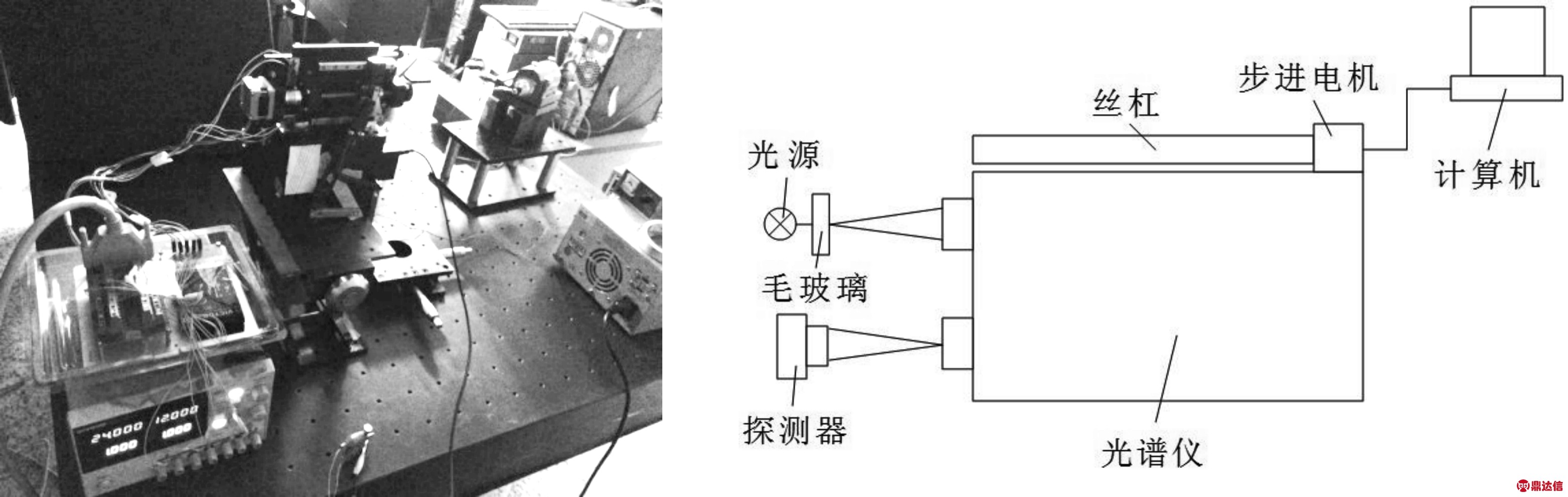
图5 双光栅光谱仪定标装置及其示意图
Fig.5 Calibration device of double grating spectrometer and its schematic view
表1 波长定标精度理论计算结果及实测值
Tab.1 Theoretical calculation results of wavelength error and measurement results
如图6所示,取各等效波长3次,独立测量误差的平均值拟合出一条波长误差曲线。
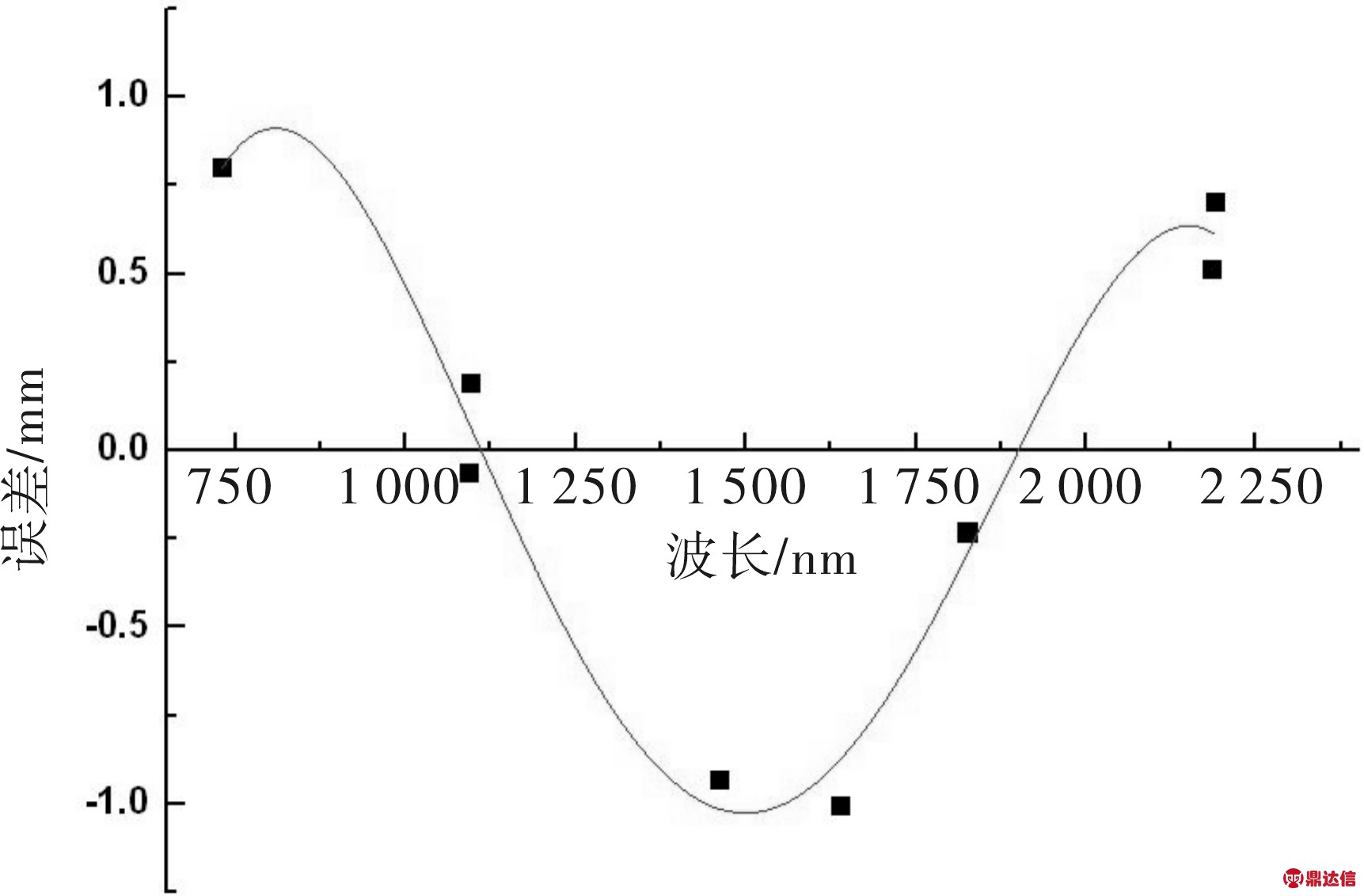
图6 波长误差拟合曲线
Fig.6 Fitted curve of wavelength and error
波长误差拟合曲线的方程为
10-4λ2+5.258 70×10-8λ3-
8.846 24×10-12λ4
(24)
再将光源换成氦氖激光器,以验证拟合曲线是否准确。当等效波长为1 265.626 nm和1 898.439 nm时,依据(24) 式可推算出其对应的波长误差分别为-0.661 nm和-0.008 nm。测量结果表明,其波长实测误差分别为-0.649 nm和-0.017 nm,可认为基本与拟合曲线相符。从拟合曲线可以看出,在红外工作波段650 nm~2 400 nm范围内,波长定标精度均在理论误差最大值±1.227 nm之内。且对于每一波长,其实际测量值均小于该波长理论误差计算最大值,从而验证了文中波长误差计算的正确性。
由图6可知,在红外工作波段650 nm~2 400 nm范围内,波长测量误差较大的区域分别为起始波段800 nm附近,最大波长区域2 200 nm附近及中间波段1 500 nm附近。
对于双光栅光谱仪红外波段实验样机,其波长值对测量误差的影响主要表现为以下3个方面:1) 由(23) 式可知,对于各类未定系统误差,波长测量误差与波长值正相关,该方面影响导致最大波长区域2 200 nm附近存在较大的波长测量误差;2) 用于测量起始波段的丝杠部分与其零位最为接近,丝杠的零位误差作为影响波长测量精度的主要因素之一,对此波段的测量精度影响尤为明显,该方面影响导致起始波段800 nm附近存在较大的波长测量误差;3) 不同的波长值对应丝杠上的不同工作位置,丝杠的定位误差则是基于丝杠上不同位置的未定系统误差,该方面影响导致了测量误差关于波长值的随机波动。图6表明,红外波段实验样机所用丝杠在中间波段1 500 nm附近对应的丝杠区域存在较大的定位误差。
上述3类影响共同作用,形成了如图6所示的波长与测量误差之间的关系。其中,测量误差与波长的正相关性客观存在,可通过控制摆杆长度误差等未定系统误差来减小最大波长区域内的测量误差。为减小起始波段的波长测量误差,应控制装配过程中引入的丝杠零位误差,结合上述分析,对于丝杠零位误差拟采用更为严格的波长定标直线度要求来实现这一目标。此外,为防止在红外工作波段内出现较大的随机误差,可对所用丝杠的工作部分提出更高的加工要求。
4 结论
依据光栅色散原理,机构几何关系和误差叠加理论,推算出双光栅光谱仪在红外工作波段650 nm~2 400 nm范围内,波长测量误差应不超过±1.227 nm。以汞灯为光源进行实验验证,测量时分别选用365 nm和540 nm滤光片,并依据测量结果,拟合出波长与误差的关系曲线。然后以氦氖激光器为光源,验证了拟合曲线的准确性。各次测量结果及其拟合曲线均与理论分析结果相符,验证了文中精度分析方法的正确性。
依据拟合曲线分析波长与测量误差之间的关系,提出采用控制未定系统误差,严格要求波长定标直线度和提高丝杠工作部分加工精度等方案来提高波长的测量精度。该方法直接从结果出发,综合考虑双光栅光谱仪波长扫描机构的光学参数与机械结构,为双光栅光谱仪零部件精度指标的确定提供了理论依据。


