
摘要:提出了一种自动测量光栅栅距修正累积误差的方法。栅距测量是基于高阶累积量估计光栅传感器输出的两路莫尔条纹信号的时间延迟而得到的,该方法能够实现每个栅距的测量,通过对每个光栅栅距的误差进行修正来减少累积误差,为大量程高精度测量奠定了基础。实验采用长为500 mm的50线/mm的光栅传感器,该传感器包含栅线25 000条,实现栅距测量分辨力为3 nm,达到了纳米级测量。该方法抗干扰能力强,适合在生产现场应用。
关键词:计量学;栅距;累积误差;光栅位移;大量程;高阶累积量
1 引 言
在光栅传感器生产中,国内外目前一般都采用激光波长或标准光栅尺作为动态光刻的定位基准。采用激光波长作定位基准,需要一套较复杂的稳频系统,若用标准光栅作定位基准,因标准光栅尺不可避免地存在分划线位置误差,由此产生的定位误差将直接影响光刻光栅尺的精度,它所产生的定位误差一般在10-6~10-7范围内,属于系统误差,需要寻求一种方法对它进行校正补偿[1,2]。
光栅栅距作为光栅位移测量的基准,其精度直接决定位移测量的准确性,光栅传感器一般给出的指标是指满量程精度,没有给出每个光栅栅距的精度,在实际测量中认为其是准确的常数。当测量精度比较低和小量程时,光栅栅距的误差影响不大,可以忽略,但随着光栅测量向着纳米级大量程的发展,需要准确修正每个栅距的误差以减少累积误差。在分析误差来源和现有方法的基础上,本文提出了一种自动测量栅距的方法,可实现每个栅距的修正和大量程光栅位移测量中的累积误差修正。
2 累积误差分析
2.1 误差来源
光栅位移测量的误差分为周期累积误差、细分误差和随机误差,检测数据也是这3种误差成份混合叠加的结果。细分误差和随机误差很容易通过频谱分析和低通滤波进行分离[3,4],不随量程增大而积累,但栅距误差则随量程增大而积累。
栅距误差主要来源于光栅传感器生产时的栅线刻划误差,此外温度变化对栅距的影响也是栅距误差主要因素。栅距误差在高精度测量时应进行修正。
2.2 误差数值
2.2.1 栅线刻划误差
刻制误差包括单线刻制误差和累积误差。光栅传感器是由标尺光栅和指示光栅构成。光电元件所接收的是进入指示光栅视场的光栅线纹的综合平均光信号。由于莫尔条纹的平均误差作用,可大大减小单线刻制误差对测量精度的影响。设光电接收元件覆盖N条栅线,光栅栅距为d,单线刻制误差为Δd,则平均误差Δ 为:
为:
对于常用的50线/mm的光栅传感器(d=0.02 mm),用10 mm的光电接收器接收,因为10 mm/ 0.02 mm=500线,因此N=500,光电接收器的总输出是500条栅线中每一条栅线输出的总和,一般刻划误差小于5%,即单根栅线的测量误差为±0.001 mm,则平均误差为[5]:
结果表明,当低精度测量时,光栅的刻划误差可以忽略,但是,要实现光栅纳米测量该误差就需要进行修正。
2.2.2 累积误差
目前,对长光栅尺准确度的评价有两种方法:
(1)全长最大误差表示准确度。如德国Heidenhain公司的1 m光栅尺准确度分为±0.1、± 0.2、±0.5、±1、±2、±4、±10μm等级别。
(2)采用精度考核公式表示。如日本三丰为
国内按公式![]() 计算,分为6个等级,不同等级的a,b取值不同[5]。
计算,分为6个等级,不同等级的a,b取值不同[5]。
设光栅累积误差为ΔL,栅线数为M,则
由式(3)可知,累积误差具有正负抵消的可能性,传感器栅距误差与累积误差对应,以光栅尺的误差0.2 mm/m为例,150 mm则约为0.03 mm。
2.2.3 温度的影响
温度变化会使光栅栅距和刻线累积误差发生变化,从而影响位移测量精度。除非受局部热源影响,一般情况下光栅的累积误差随温度呈线性变化。光栅在连续移动过程中测量位移,可以认为标尺光栅的温度是均匀的。令光栅设计温度为20℃,光栅栅距和光栅刻线累积误差的相对变化分别表示为[2]:
式中:a为光栅材料的线膨胀系数;d为光栅栅距;Δd为温度变化引起的光栅栅距常数变化量;L为位移的量程;ΔL为由温度变化引起的光栅位置误差。
对一般光学玻璃而言,线膨胀系数a约为8× 10-6/℃。对于光栅为50线/mm,L=500 mm,当温度变化±1℃,则有:
可见,温度每变化1℃,栅距的变化达到了nm级,长度的变化达到了μm级,要实现nm测量时,温度对光栅栅距和光栅刻线累积误差的影响则不能忽略。
2.3 累积误差修正问题
在低精度测量时,光栅的累积误差可以按给定误差进行简单修正,但是,要实现光栅nm测量则需要进行精确修正。
目前对栅距误差进行补偿具体方案有两种:一种是逐点补偿,即在光栅传感器全量程范围内的每一个点均预先测定其误差值,当系统工作时,在原有计数值的基础上逐点进行补偿;另一种是分区补偿,即在全量程范围内,等间隔划分若干小区,每个小区的误差值经预先测定后确定,且为一定值,当系统工作时,在原有计数值的基础上进行相应小区的误差补偿[1]。显然,逐点补偿的准确性高于分区补偿,但要求预先测量出每个栅距值。
栅距的误差是累积误差的主要原因,栅距的准确测量是栅距累积误差修正的关键。
3 高阶累积量时延估计法测量栅距原理
光栅参数的测量可分为直接测量法和间接测量法两类,直接测量法能够直接得到栅距值,间接测量是通过测量波长和入射角等与栅距有关的量间接获得[6~12]。
现有的测量方法虽然能够实现栅距的准确测量,但是存在不能在线测量、自动实现能力比较差、测量繁琐、成本高、量程有限和实用性较差等问题。
当光栅传感器的指示光栅和标尺光栅作相对运动时输出莫尔条纹信号,因此在栅距测量过程中需让光栅传感器以一定的速度运动,光栅栅距可表示为:
式中:v为光栅传感器运行速度;T是指光栅传感器在速度v下移动一个栅距的位移所需要的时间;分别测出速度和时间通过式(6)可得到栅距d。
光栅传感器静止时输出直流信号,运动时输出幅值在±1 V之间的近似正弦交流信号,输出信号的频率和幅值随运动速度变化。因此在光栅栅距测量过程中,为了保证输出信号的波形质量,尽量让光栅传感器以匀慢速运行,使光栅传感器输出较高质量的莫尔条纹信号,采用高分辨率高速度数据采集系统采集莫尔条纹信号进行处理,实现在运行过程中动态测量栅距。一般光栅传感器中的4个光电转换器等距离均匀分布,并且光电转换器的位置固定不变,因此利用相关法测出任意两个光电转换器输出信号之间的渡越时间,再由已知光电转换器的固定距离和渡越时间就能够得到运行速度,实质上就是将测距转化成了渡越时间的测量。实现相关法需要对光栅传感器输出的信号进行同步数据采集,渡越时间测量的分辨率和精度主要取决于采样的速率和精度,为实现高精度的速度测量,采用高精度高速A/D构建同步数据采集系统,可以控制光栅传感器慢匀速运行获得大周期信号。
测速原理如图1所示,根据传感器光电转换器的距离和信号的渡越时间可以确定光栅传感器的运行速度:
其中 ′是两个光电转换器的距离l的θ倍;θ为莫尔条纹的夹角,为常数;τ是两个光电转换器的时间延迟。
′是两个光电转换器的距离l的θ倍;θ为莫尔条纹的夹角,为常数;τ是两个光电转换器的时间延迟。
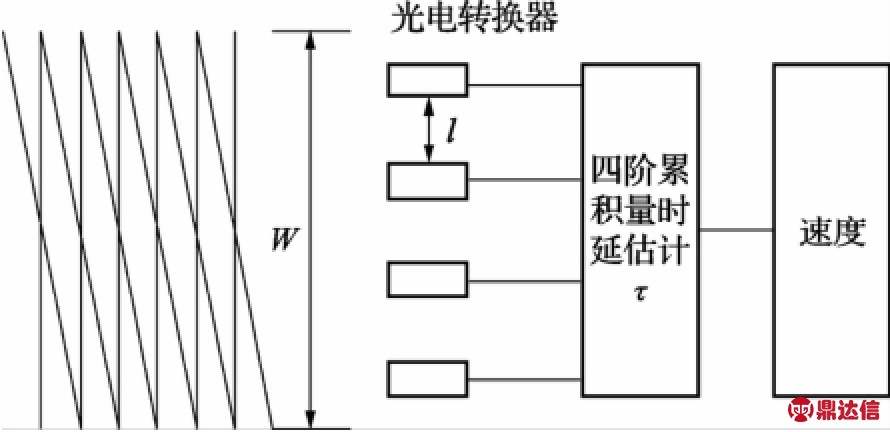
图1 测速原理图
为了进一步提高测量精度,任意两个光电转换器之间均进行相关测出莫尔条纹的渡越时间和运行速度,然后取其均值。
为了进一步提高重复性,可以多次往复运动光栅传感器,对多次测量结果进行求均值作为最终结果存入内存。
数据采集系统采集运动的光栅传感器输出的莫尔条纹信号具有周期性,两次相邻峰值之间的时间即为一个栅距所对应的时间,因此测量出两个峰值点之间的时间即可得到栅距的周期时间T。栅距的周期时间T根据采样时间和相邻峰值之间的采样点数可以获得。
渡越时间的测量采用了高阶累积量方法获得。该方法的突出优点是能够充分利用信号的高阶信息,并有效地抑制相关高斯背景噪声的干扰,对于非高斯分布的信号可得到较高的估计精度。三阶累积量的时延估计方程不能保证参数的可辨识性,而四阶累积量能保证时间延迟参数的可辨识性,因此采用了四阶累积量方法估计渡越时间,其要求信号具有非零四阶累积量[13,14],光栅莫尔条纹信号呈正弦性,因此采用了四阶累积量进行时延估计是可行的。
设x(n)和y(n)是采集两个光电转换器的离散时间数据。x(n)是非高斯信号,w1(n),w2(n)表示加性高斯噪声源。即
其中:β为衰减系数。时延估计问题就是根据有限长的测量结果x(n)和y(n)估计出时间延迟τ。
对于零均值平稳随机过程x(n)和y(n),其四阶累积量为:
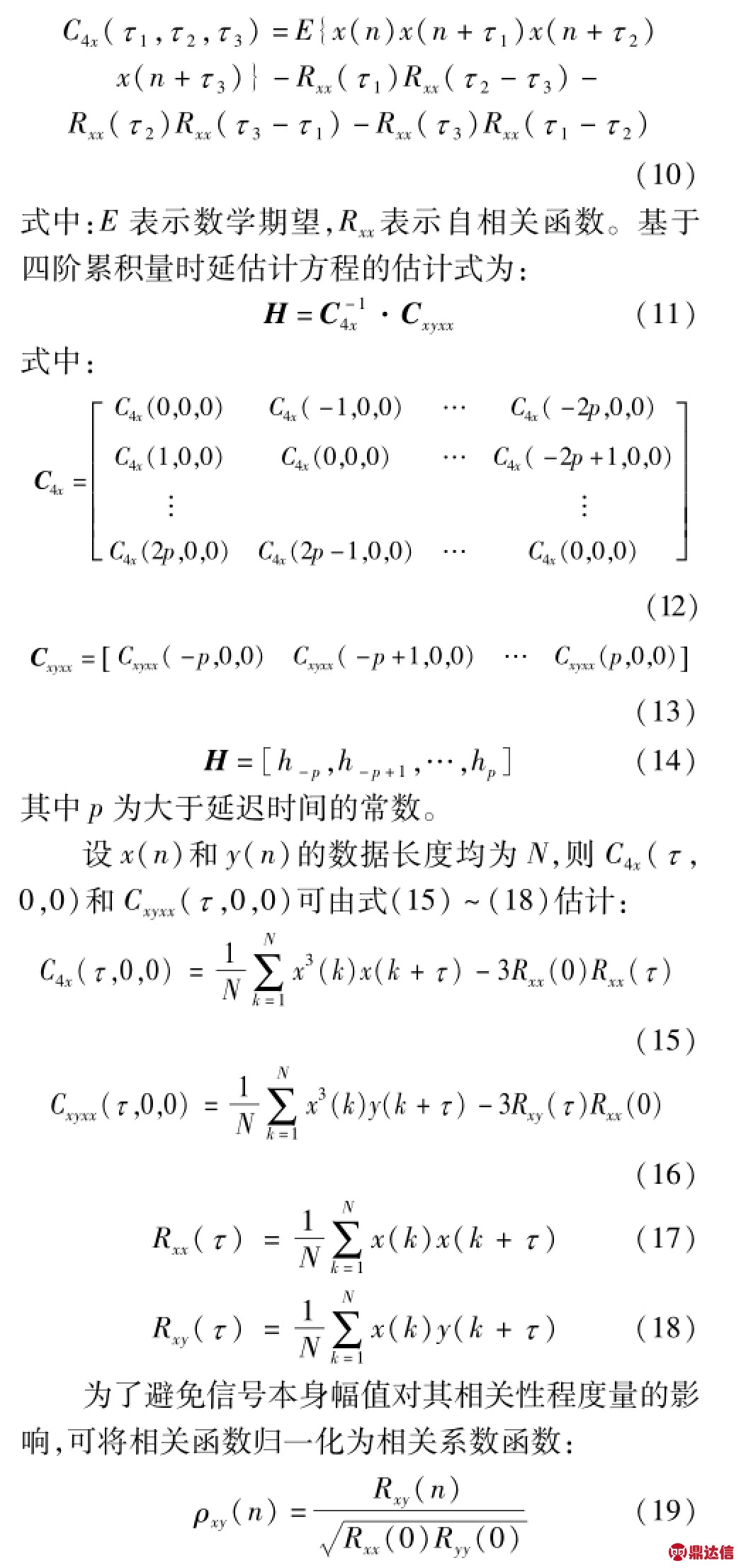
其中Rxx(0)、Ryy(0)为n=0自相关函数的值。
本文提出的测量方法能够实现自动测量每个栅距值,因此可以采用逐点法进行误差修正,从而实现累积误差的有效修正和大量程高精度位移测量。
4 实验结果
实验采用国产光栅尺,长为500 mm,误差为±7μm栅距为20μm的栅距光栅传感器,包含栅线25 000条。
数据采集系统采用了USB-6366,其是差动8通道同步数据采集卡,采样频率最高为2 MHz,其对应的采样周期为0.5μs。
在实验中以匀慢速度运行光栅传感器,采样周期为0.5μs,获得时间周期约为4 000μs的光栅莫尔条纹信号,则一个栅距内的采样点数约为8 000,相当于对栅距进行了8 000倍细分,测量分辨力约为3 nm,使栅距的测量达到了nm级。由此可知分辨力与光栅速度、采样速度相关,降低光栅速度或提高采样速度可进一步提高分辨力。
实验中采集的传感器的四路相差90°的信号实际波形如图2所示,进行差动采集的两路相差90°的信号波形如图3所示,虽然硬件的差动处理去掉了大部分直流成份,但仍存在较小的直流成份,需要再经过软件处理进一步去直流,获得零均值序列,以满足时延估计的条件。
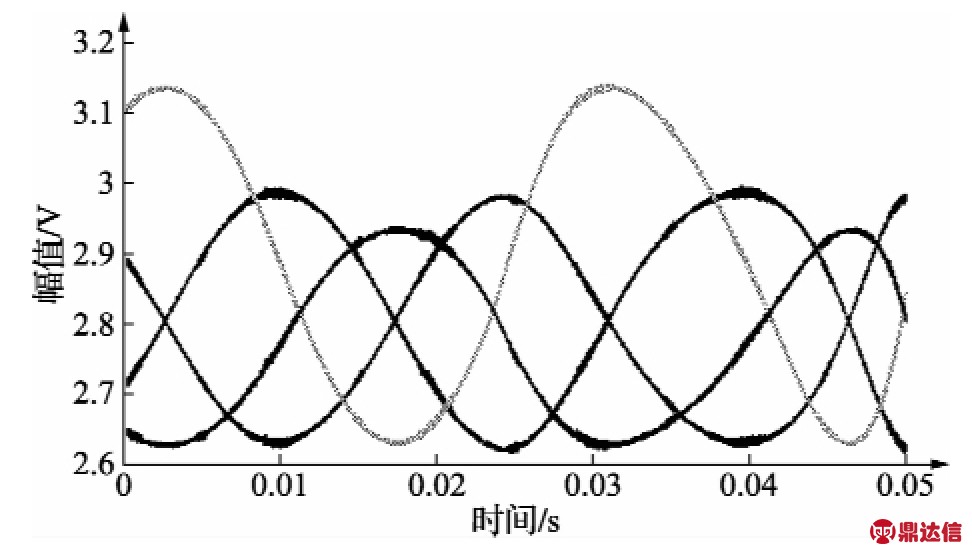
图2 光栅莫尔条纹实际信号
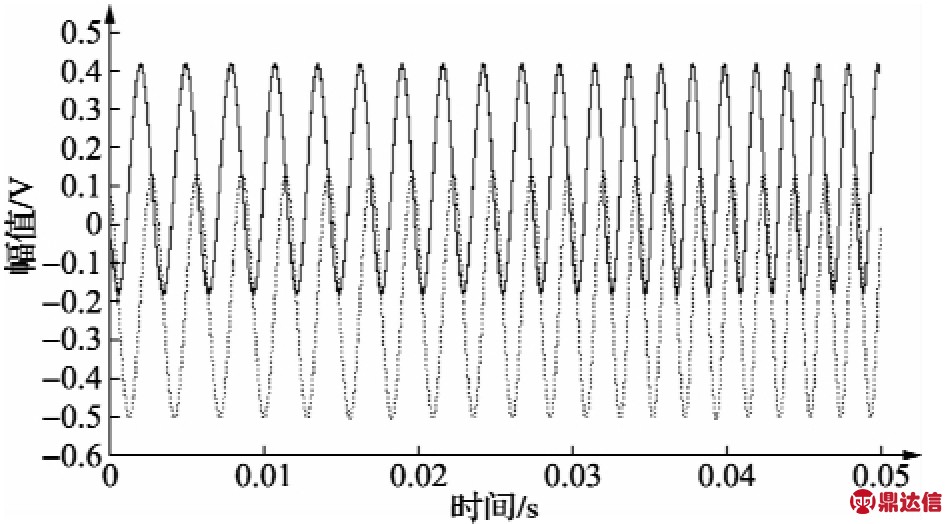
图3 差动采集的光栅莫尔条纹信号
对图3采集的数据进行时延估计处理和栅距周期时间处理获得实际的栅距值,根据每个实测的栅距值可以修正每个栅距的误差,消除累积误差。
比对测量采用了线性可变差动变压器(LVDT)测量方法,其测量分辨力为2 nm,量程为0~200 μm,线性度为0.03%。因为分辨力达到nm级位移测量方法,其量程都比较短,因此全量程采用分段测量实现。全量程500 mm包含栅线25 000条,即需要测量25 000个数据,数据量较大,表1只列出了一组对应LVDT量程0~200μm的测量结果,测量最大误差为0.103μm。误差曲线图如图4所示。
表1 测量结果μm
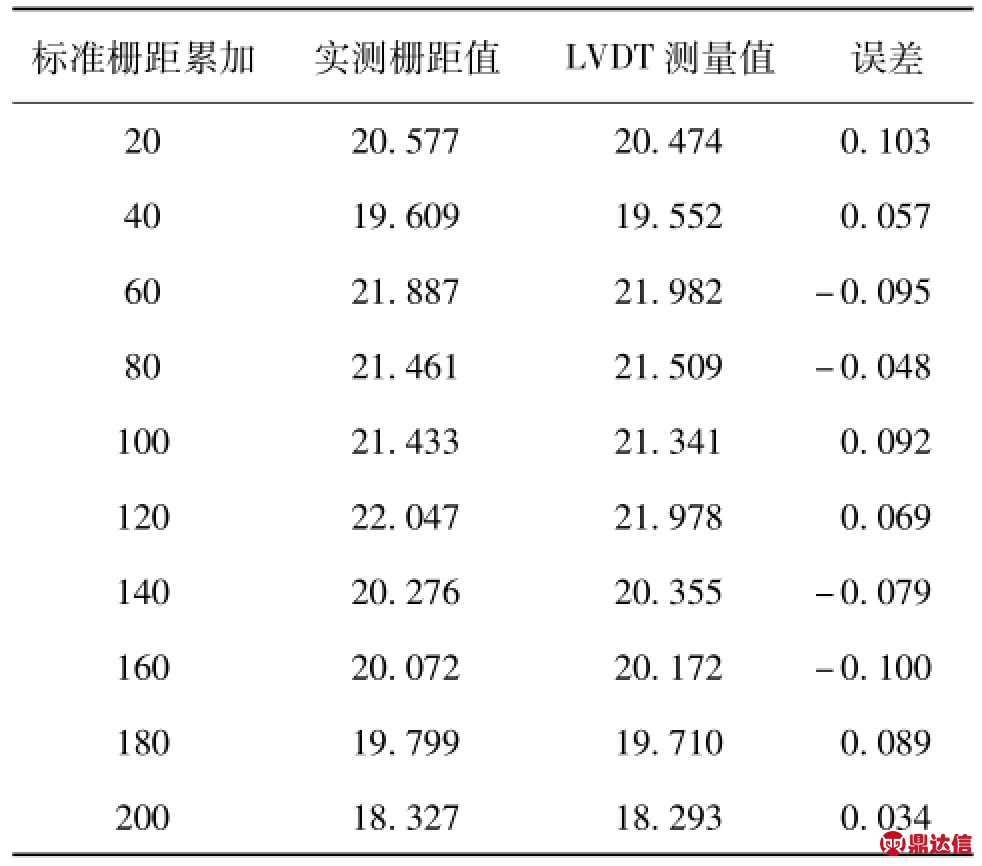
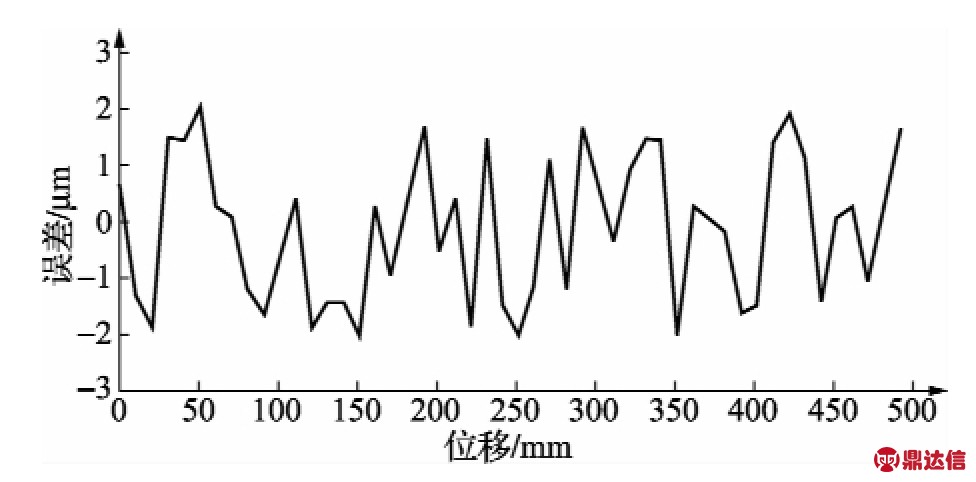
图4 全量程误差曲线图
本文提出的方法能够实现在线自动测量,测量方便,可以反复进行测量,当温度等各种影响因素变化时重新采集数据进行处理就可以得到新的栅距数据进行修正,具有较强的实用性。
5 结 论
本文提出的通过测量光栅栅距逐点修正累积误差的方法经实验证明是可行的,控制光栅传感器输出信号周期和采样周期的比例,可以使栅距测量达到nm分辨力,不仅为光栅在高精度大量程位移测量与应用奠定了基础,同时为光栅栅距的测量提供了新方法。采用的高阶累积量的时延估计方法具有较强的抗干扰能力,可以在生产现场直接实现栅距测量,大大提高生产质量和效率。


