
摘 要:多摄像机是解决结构光测量系统中视场小和自遮挡等问题的有效方案,但同时由于摄像机分布广、无公共视场,存在全局标定困难的问题。提出了一种基于条纹投影的多摄像机标定方法。加入辅助设备投影仪并向视场内投影大幅面的条纹图案,借助相位算法建立起全局相位场,反求景物的投影仪虚拟图像。利用平面靶标标定摄像机的内参和投影仪的外参获取靶标平面的移动信息,进而求解相邻摄像机的位置参数。最后的优化过程中,再根据相位值对相邻摄像机的图像完成亚像素匹配,通过最小化重建偏差对系统参数进行迭代优化。在搭建的多摄像机三维测量系统上进行试验,结果表明本文的多摄像机标定和测量方案切实可行。
关键词:标定;多摄像机;结构光;测量
1 引 言
结构光测量[1-2]是一种高效的、非接触的物体三维形貌测量技术,目前已经广泛应用于逆向工程、磨具设计、工业检测、文物保护等领域。该技术依据视觉设备的成像模型,恢复成像的光路方程,进而利用多光路相交来求解物体表面的三维坐标,测量过程依赖于标定设备模型的参数[3-4],标定精度对系统的测量精度具有决定性的影响。
摄像机标定通常需要借助精确制造的靶标,利用靶标上特征点的已知信息和其成像后的图像坐标来精确求解小孔成像模型[5]。单摄像机的标定一般采用Zhang ZH.Y.[6]的平面模板法,此方法精度较高,简便易用,已被广泛认可。在某些大物体测量的应用场合中以及待测物体存在自遮挡的条件下,常常由于单摄像机的视场限制[7],而造成测量数据缺失,且物体表面的阴影也会增加结果中的噪点。增加摄像机的数量,突破单摄像机的视场限制,可提高测量系统的可用性。多摄像机测量系统,由于其摄像机间无公共视场,靶标无法同时出现在所有摄像机的视场内,而靶标的移动信息一般也难以精确测定,这样导致系统的全局标定十分困难。建立基准坐标系来合并各个摄像机的测量数据是多摄像机系统标定的目的。目前,不重叠视场下的多摄像机全局标定,主要是依靠辅助设备为标定过程提供额外的约束信息,在单摄像机标定的基础上完成全局标定,辅助设备主要有全站仪[8]、平面镜[9]、一维标定物[10]等;文献[11]借助两束激光直线完成多摄像机的标定,首先利用Zhang ZH.Y.的方法标定摄像机的内参,再提取激光直线和靶标平面的交点,求取它们在摄像机坐标系下的坐标,最后利用这些点的共线性求解摄像机间的位置参数,方法具有较高的精度,但标定耗时较长,文献[12]使用结构光平面以及共面性约束改进方法,降低了操作复杂度;文献[13]制作了一个巨型的平面靶标,摄像机拍摄靶标局部图像,完成内参标定,提出了一种类迭代最近点算法求取局部图像的位置关系,进而求解外参,算法计算量巨大,而约束信息少也使得标定精度相对较低。
研究了多摄像机测量系统的全局标定,提出了一种基于条纹投影的多摄像机标定方法。向摄像机视场内投影条纹图案,并借助相位算法建立起全局相位场;重建靶标的投影仪虚拟图像并标定投影仪;再结合单摄像机标定的外参结果可求解相邻摄像机的位置关系;最后对结果进行最小重建偏差优化,建立起系统的高精度全局测量模型。实验结果证明方法在测量中切实有效。
2 原 理
多摄像机测量系统标定原理如图1所示。将多台摄像机在空间中固定好,增加一台投影仪,标定过程中将向全摄像机视场范围内投影设计好的条纹图案。由摄像机采集靶标的条纹图像,经计算机处理可得标定结果。不失一般性,将以两台摄像机A、B具体阐述标定过程,摄像机数量大于2组的多摄像机测量系统,可以两两一组,逐步换算,建立全局测量模型。

图1 多摄相机标定系统
Fig.1 The multi-cameras calibration system
2.1 摄像机内参标定
首先需要逐个完成单摄像机的标定,分别在摄像机A、B的视场内,移动平面靶标并拍摄靶标的条纹图像和常规图像,单摄像机标定过程不需要参考条纹图像,将条纹图像按时间序列存储。设靶标平面分别为![]() , (i=1,2,3, …,n)。借助图像处理技术,提取靶标常规图像上圆心点的亚像素图像坐标,齐次坐标记为m。以摄像机A视场内靶标平面
, (i=1,2,3, …,n)。借助图像处理技术,提取靶标常规图像上圆心点的亚像素图像坐标,齐次坐标记为m。以摄像机A视场内靶标平面![]() 为例,已知靶标圆心间的物理距离,设其世界坐标中Z轴分量为0,可得圆心点齐次坐标M,将以上信息带入摄像机的一般小孔成像方程中:
为例,已知靶标圆心间的物理距离,设其世界坐标中Z轴分量为0,可得圆心点齐次坐标M,将以上信息带入摄像机的一般小孔成像方程中:
(1)
式中:K为摄像机内参矩阵,是反映镜头和感光芯片的物理参数;R、t为旋转矩阵和平移向量,表示靶标坐标系到摄像机坐标系的转换关系;r1、r2为矩阵R的前两个列向量,λ为比例系数,则单应性矩阵H可写为:
H=λK[r1,r2,t]=[h1,h2,h3]
(2)
对式(1)代入多组圆心数据,超定方程组的最小二乘解,可作为H的值。求得H矩阵后,利用旋转矩阵R的单位正交特性,可得:

(3)
摄像机内部参数K有5个未知量,因此单摄像机至少需要拍摄三幅不同姿态的靶标,以完成内参标定。一般拍摄较多靶标图像时,可提高求解精度。
求得摄像机内部参数K后,其他参数可推导如下:
(4)
求解的摄像机内参和关键参数设为:摄像机A、B的内参矩阵KA、KB,靶标平面![]() 分别到摄像机A坐标系的转换关系
分别到摄像机A坐标系的转换关系![]() 以及靶标平面
以及靶标平面![]() 分别到摄像机B坐标系的转换关系
分别到摄像机B坐标系的转换关系![]() 。
。
2.2 摄像机位置标定
投影仪投影的图案是事先设计好的条纹图案,由计算机合成,分别是一组相移90°的正弦条纹图案和灰阶码图案[14]。摄像机采集景物表面的条纹图像,它们的作用是建立测量范围内的全局相位场,为标定提供辅助信息。
对2.1节采集到的正弦相移条纹图像进行处理,可计算主相位值,假设4幅相移图像灰度值如下:
(5)
式中:Ii(u,v)为第i幅图像的灰度值,I′为条纹光强背景值,I″为调制强度,θ为待求相位场。可得相位主值为:
(6)
式中:φ(u,v)的值域为(0,2π),其完整的相位值应为:
θ(u,v)=φ(u,v)+2k(u,v)π
(7)
式中:k(u,v)是整数,代表图像点(u,v)所处条纹的周期次数。确定k值,将主值相位展开为连续分布的绝对相位,被称为解相位。灰阶码图案是一组周期数成倍增加的二值条纹图案,其最大周期数和正弦条纹图案一致。对靶标的灰阶码条纹图像按时间轴排列,根据灰度值对像素点编码可获得一个二进制数,每一个数字都对应确定的周期次数,可求绝对相位。解相位原理如图2所示。
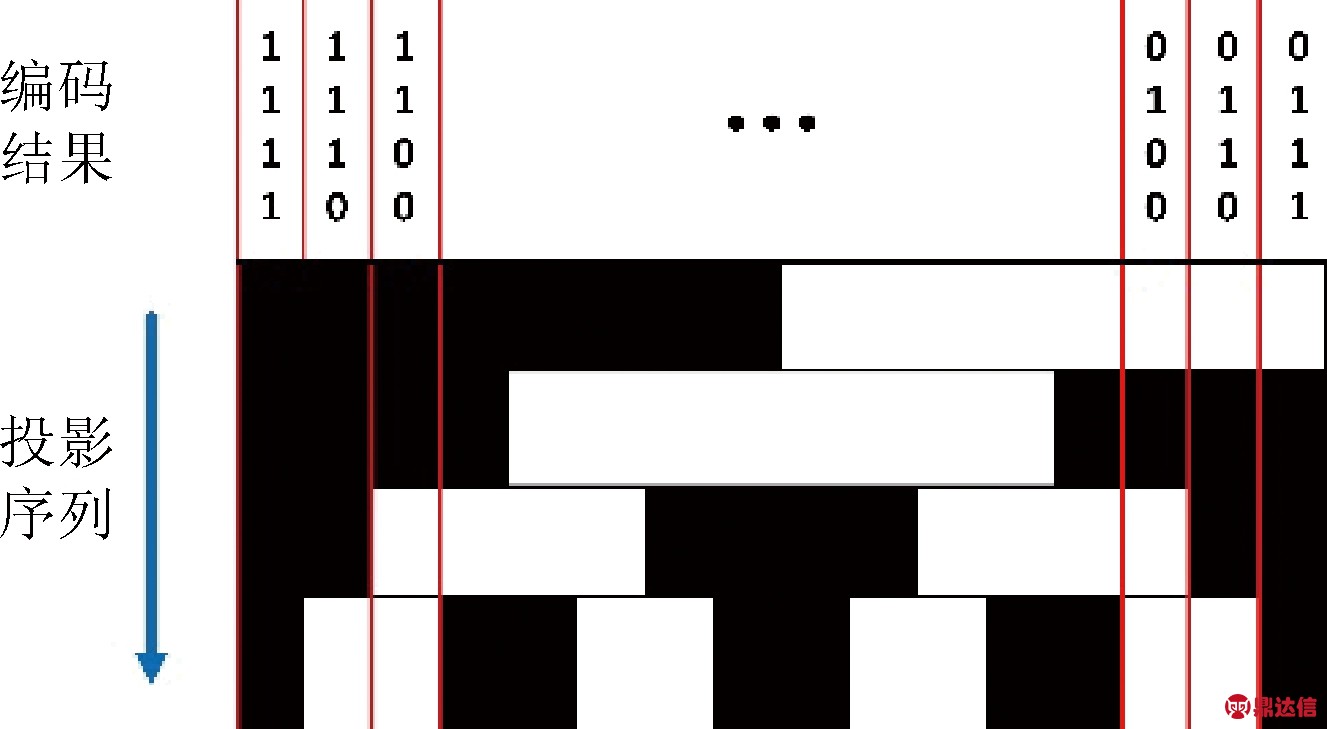
图2 灰阶码图案序列
Fig.2 Sequential binary-code patterns
如果投影横、纵两组条纹图案,并得到两个方向上的相位场,这将为景物表面提供全局唯一的数值特征。相位算法的计算过程对不同像素点的处理相互独立,可以仅计算感兴趣点的相位值,减少算法的时间消耗。维纳斯头像横向相位求解结果如下。
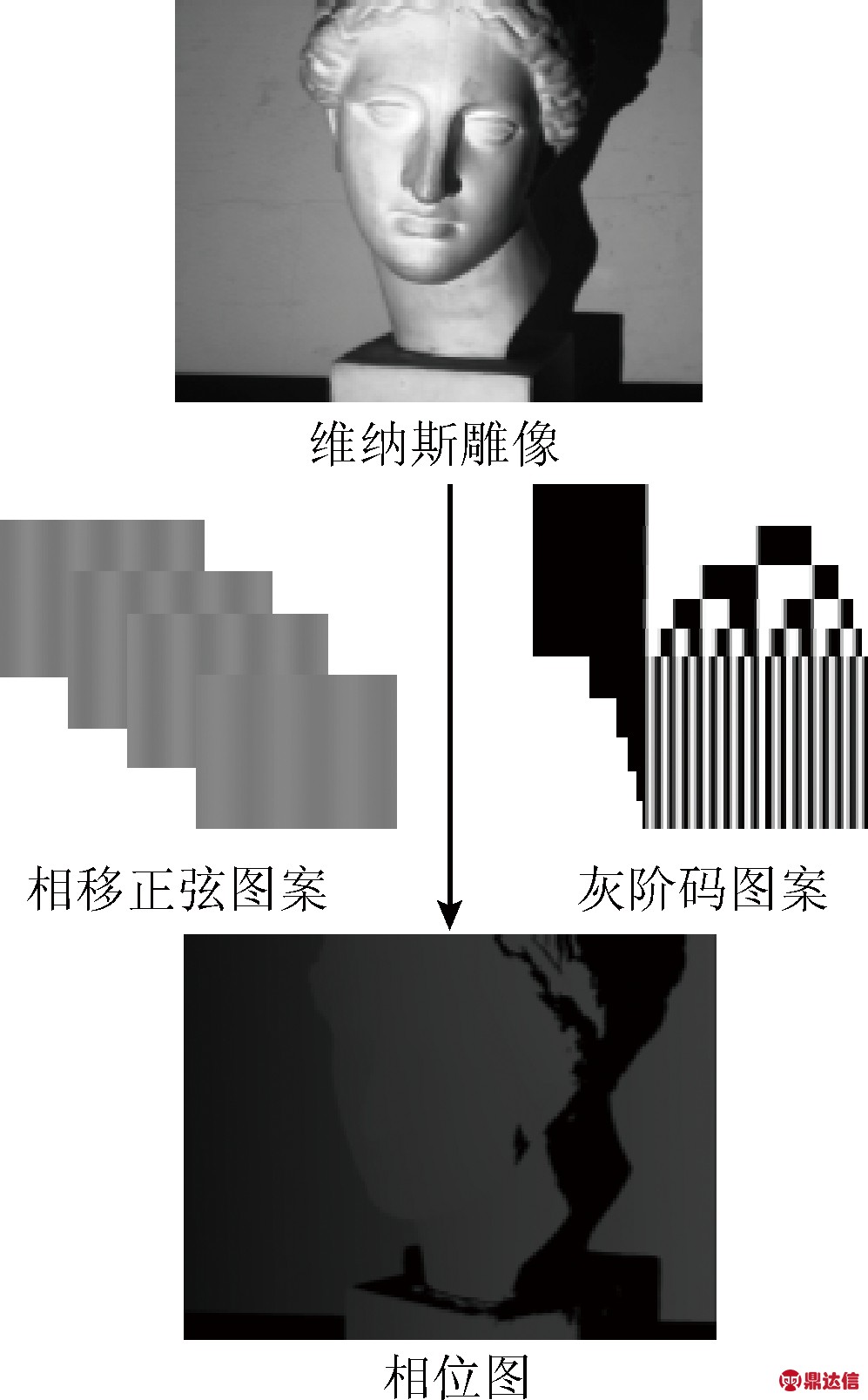
图3 维纳斯表面水平绝对相位
Fig.3 Horizontally absolute phase in Venus
将投影仪当作一个逆向的相机[15],景物表面的相位值可换算出投影仪图像坐标下的一个像素点,由此可恢复出投影仪虚拟图像。空间点在投影平面的图像坐标如下:
(8)
式中:θh、θv分别为点的横、纵相位值,w、h为投影仪分辨率,N为条纹的总周期数。至此,参考2.1节,标定投影仪可得各靶标平面到投影仪坐标系的转换关系![]() )和
)和![]() )。
)。
完成上述过程,系统中的设备位置关系如图4所示。
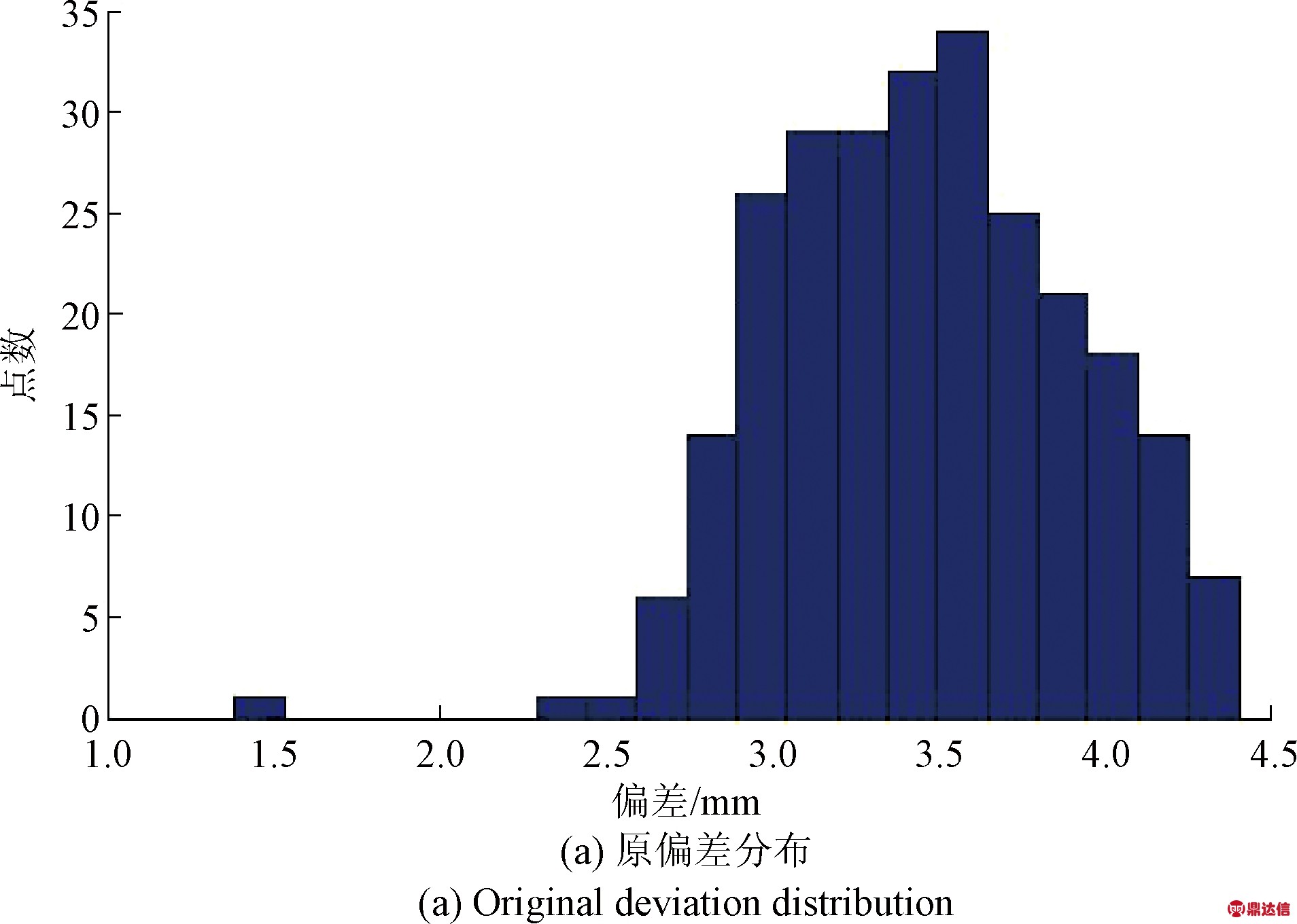
图4 相邻摄像机坐标系转换
Fig.4 The conversion of the local coordinate between two cameras
经过简单的转换计算,两个摄像机坐标系之间的转换关系如下:
(9)
上式中省去了模板平面记号i,将多组数据求解,取平均作为最终的结果。在摄像机多于2台的情况下,将摄像机A的坐标系设为整个多摄像机测量系统的世界坐标系,求取相邻摄像机的位置关系,通过矩阵链乘,便可得到其他摄像机到摄像机A的转换关系。
2.3 全局优化
为了消除标定误差,提升测量精度,标定算法一般还需对模型进行参数优化。标定多摄像机时,由于摄像机A、B拍摄的图像均无对方视场内的靶标,故传统的重投影误差法无法对摄像机坐标系的转换关系RBA、tBA进行优化。提出了一种基于重建偏差的优化算法,以提高系统的标定和测量精度。景物分别经摄像机A、B重建可得两组测量值,重建偏差表示为两组结果的物理偏差距离。
将投影仪当作逆向的摄像机,和摄像机组合便可看成经典的双目立体视觉系统,以摄像机A和投影仪为例,借助标定结果,可得景物的重建方程,如下:
(10)
式中:mP坐标是利用点mA的相位值经式(8)求得的投影仪的图像坐标,P为待求点的三维坐标。
实际测量中,为了防止测量数据缺失,相邻摄像机一般有少量公共视场,通过匹配可求公共点。跟传统的立体匹配[16]不同,这里利用空间点的相位值,辅以双线性插值获取空间点分别成像在摄像机A、B图像中的亚像素点,设为![]() 和
和![]() , j=1,2,3,…,x,重建结果分别为
, j=1,2,3,…,x,重建结果分别为![]() 和
和![]() 。结合转换关系式(9),建立起重建偏差函数:
。结合转换关系式(9),建立起重建偏差函数:
Dis=![]()
(11)
利用LM(levenberg-Marquardt)算法对系统外参做迭代优化。
由上述可知,三维测量的过程就是求解出两条代表光路的直线方程,将其交点定为测量值;而传统重投影方法的结果是代表光路的一条直线和成像平面的交点,其解不在空间三维坐标系,且前者对模型的精度要求更为苛刻,这导致重投影的优化结果未必可以得到很好的测量效果[17]。本文的测量偏差模型更为精细,理论上可以得到更精确的测量结果。
3 实 验
为了验证本文算法的可靠性,搭建了一个多摄像机标定、测量系统进行试验。系统组成:BASLER公司的型号为scA1400-17gc GigE,分辨率为1 390×1 038像素摄像机、BENQ公司型号为GP30,分辨率为1 280×800 DLP投影仪、Dell-PC机以及三脚架。试验程序在Windows 7和Visual Studio 2013环境和工具下运行。本系统中,被测物体放置于投影仪前方约100 cm处,摄像机之间相距约为50 cm,每个摄像机的测量范围为30 cm×40 cm,投影范围约为180 cm×100 cm。条纹图案分辨率为1 280×800,周期数为64。
3.1 多摄像机系统的标定
系统包含两台摄像机,采用二维圆阵标定板对多摄像机测量系统进行标定。步骤如下:
1) 调整投影仪,使得投影的条纹能够覆盖左、右摄像机的视场,需要投影的图像包括一组正弦相移图案和灰阶码图案;
2) 在左、右摄像机各自的视场内,多次移动标定板,在每个姿态下,摄像机配合投影仪,拍摄一组标定板的条纹图像,并按时间序列存储;
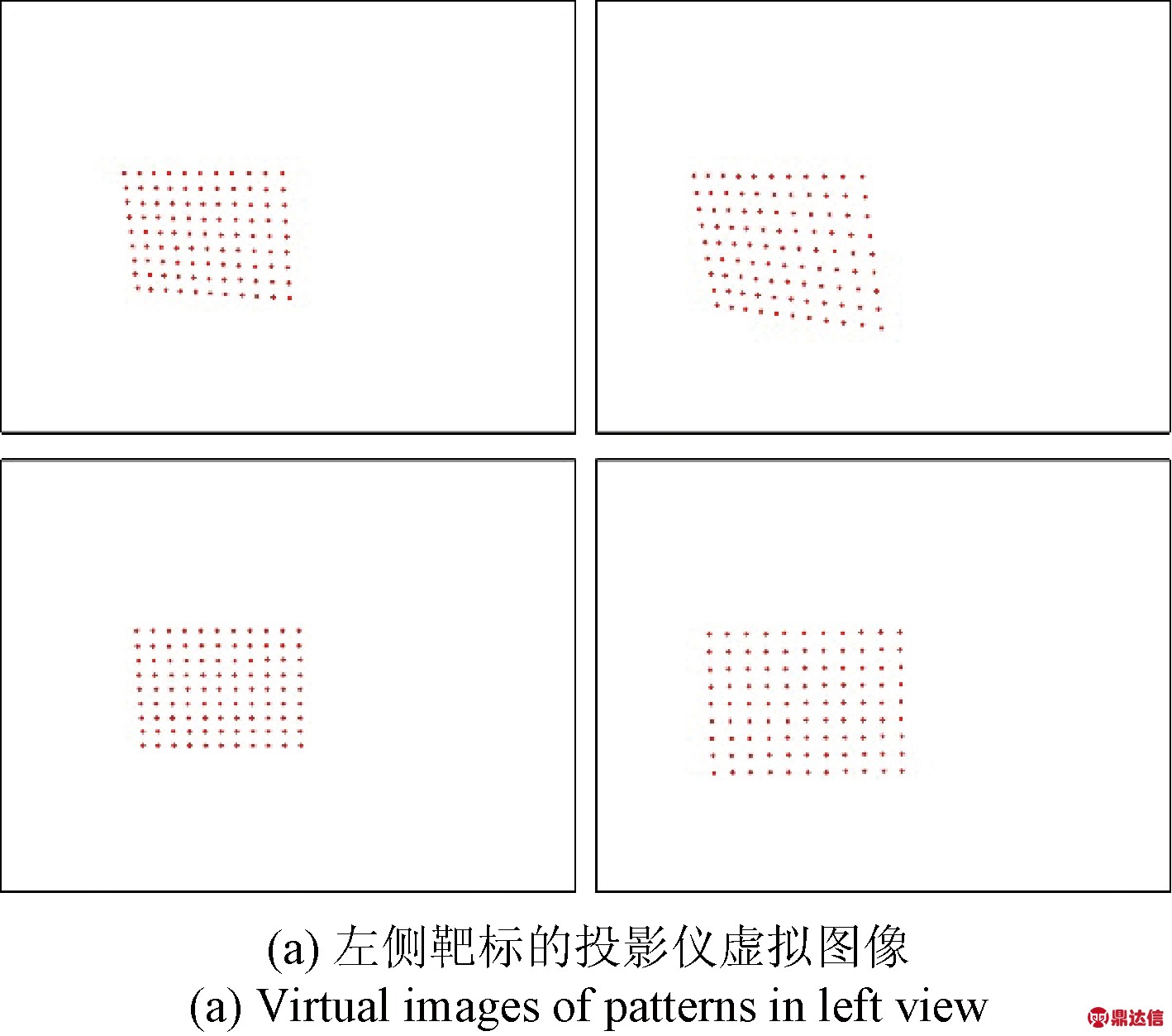
3) 提取圆心的亚像素图像坐标,再对每个标定板姿态下的条纹序列图像参照2.2节的方法计算相位,并获取标定板圆心的投影仪虚拟图像,如图5所示;
4) 利用上述图像的圆心点信息,对摄像机和投影仪参照2.1节内容进行标定,直接求得摄像机内参,通过式(9)转换求得外参;
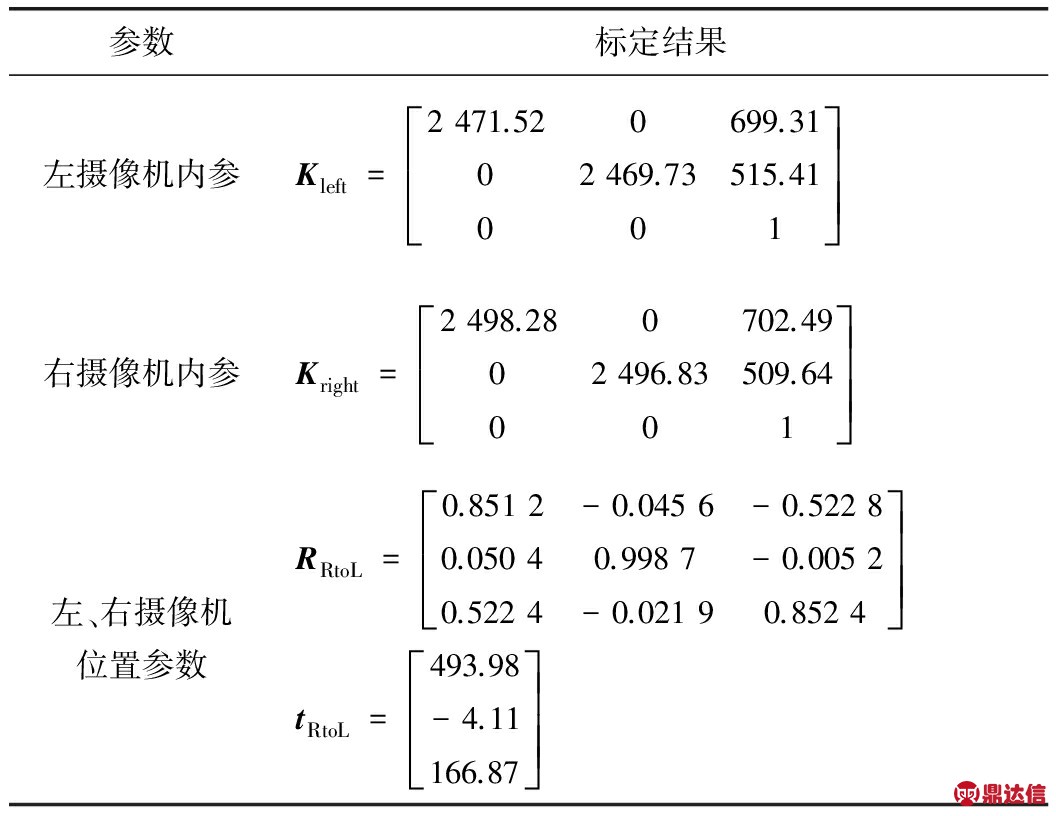
5) 参照2.3节内容完成参数优化。标定结果如表1所示。
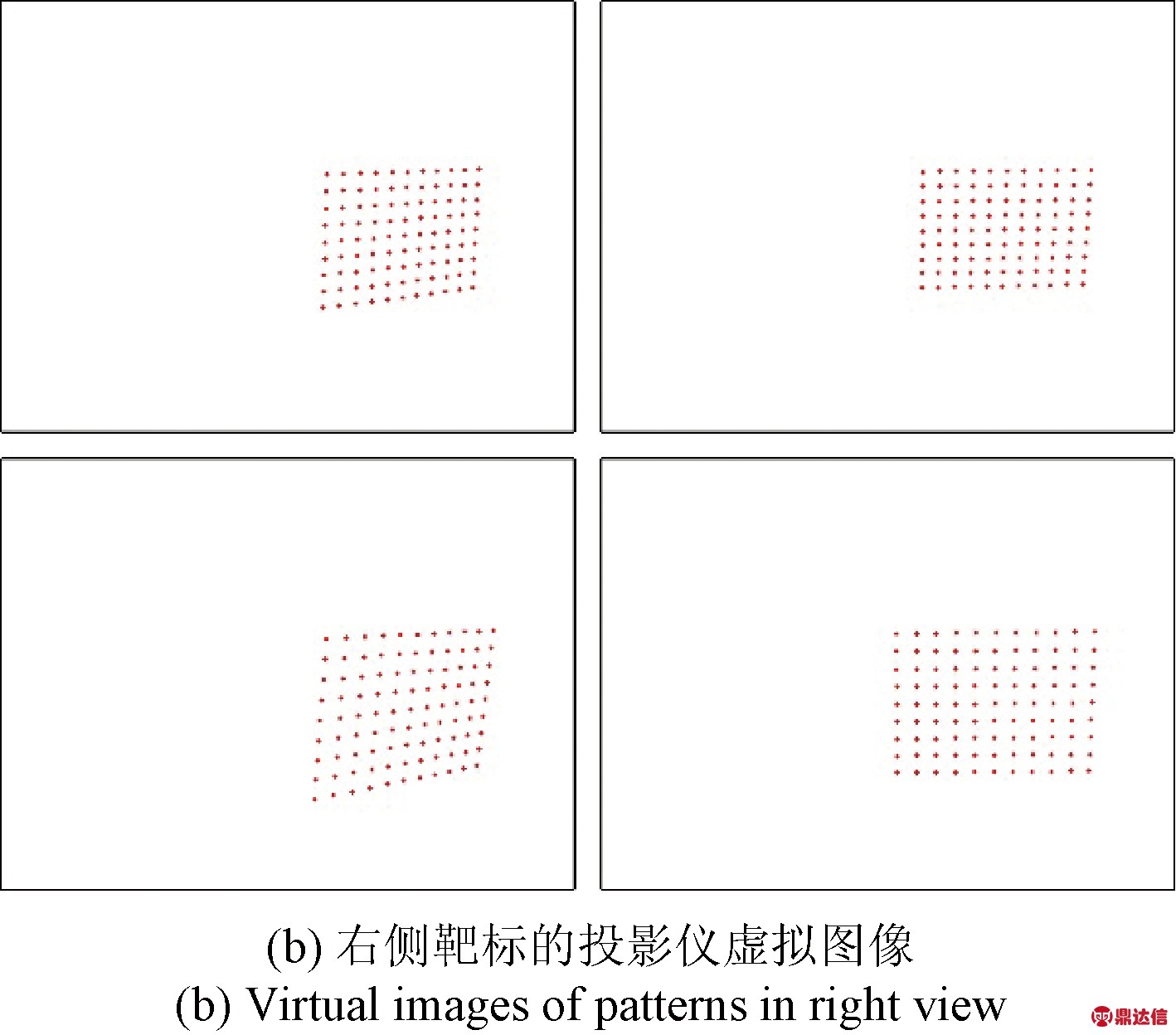
图5 投影仪标定图像
Fig.5 Projector images for calibration
表1 标定结果
Table 1 Calibration results of cameras
3.2 误差分析
为了验证本文方法的标定精度,制作了一个能同时覆盖左、右摄像机视场的大平面靶标进行重投影误差实验。
将大尺寸圆阵靶标安置在摄像机视场内,移动靶标,左、右摄像机分别拍摄12张靶标图像,去除一张标定误差较大的图像,单摄像机标定求得靶标平面分别到左、右摄像机坐标系的转换关系![]() (l=1,2,…,11),结合表1的内参标定结果Kleft、Kright分别求取圆心点在左、右摄像机的重投影像素点,与实际图像坐标的误差记为e1、e2。求取靶标左半部的圆心在右摄像机坐标系下的坐标,再利用表1中右摄像机坐标系到左摄像机坐标系转换关系求解它们在左摄像机坐标系下的坐标,最后计算重投影误差,记为e3。结果如图6所示。
(l=1,2,…,11),结合表1的内参标定结果Kleft、Kright分别求取圆心点在左、右摄像机的重投影像素点,与实际图像坐标的误差记为e1、e2。求取靶标左半部的圆心在右摄像机坐标系下的坐标,再利用表1中右摄像机坐标系到左摄像机坐标系转换关系求解它们在左摄像机坐标系下的坐标,最后计算重投影误差,记为e3。结果如图6所示。

图6 重投影误差
Fig.6 The reprojection error
由图6可知,e1、e2表明单摄像机标定精度很高,11张图像的平均重投影误差在0.1pixel左右,e3误差略高于前者,这主要是因为最后的左、右摄像机的位置关系是多个计算值的平均值,但这样的误差还未实际威胁测量过程。
3.3 测量结果展示
传统单摄像机测量结果如图7所示。
图7 单摄像机测量结果
Fig.7 The single-camera measurement
利用搭建的多摄像机测量系统对维纳斯雕像的重建结果如图8所示。
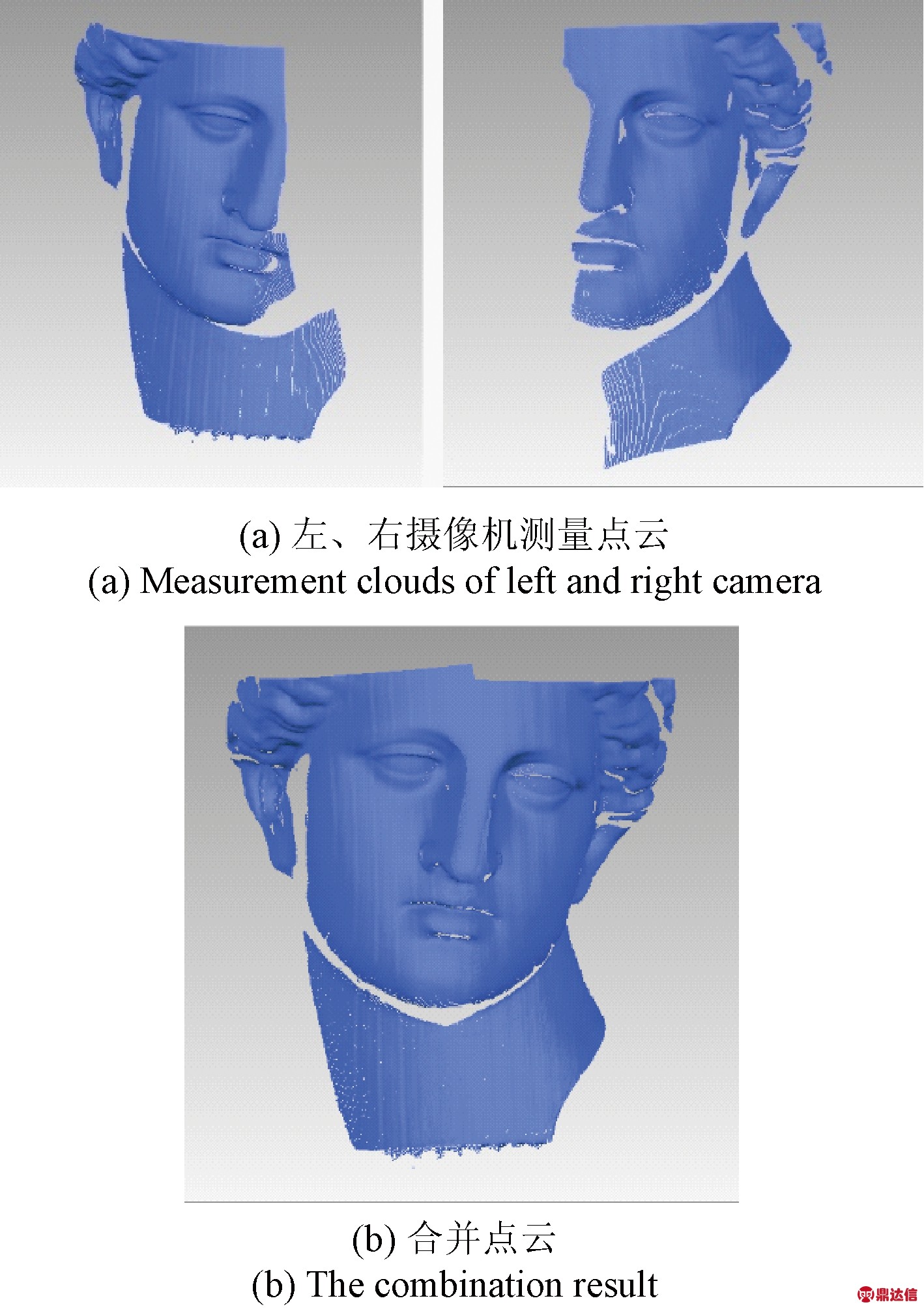
图8 维纳斯测量结果
Fig.8 Reconstruction of Venus
比起传统的单摄像机测量系统,多摄像机系统在克服测量视场和自遮挡问题上都有更佳的表现,体现为人物头像的重建更为完整,鼻翼两侧的数据缺失问题得到解决。左、右点云重叠处没有明显的层次感,说明测量数据的一致性高。
为了验证测量数据的一致性,参照2.3节,提取左、右点云中公共点的重建数据,给出了公共点经2.3节优化前后的重建偏差分布。如图9所示。
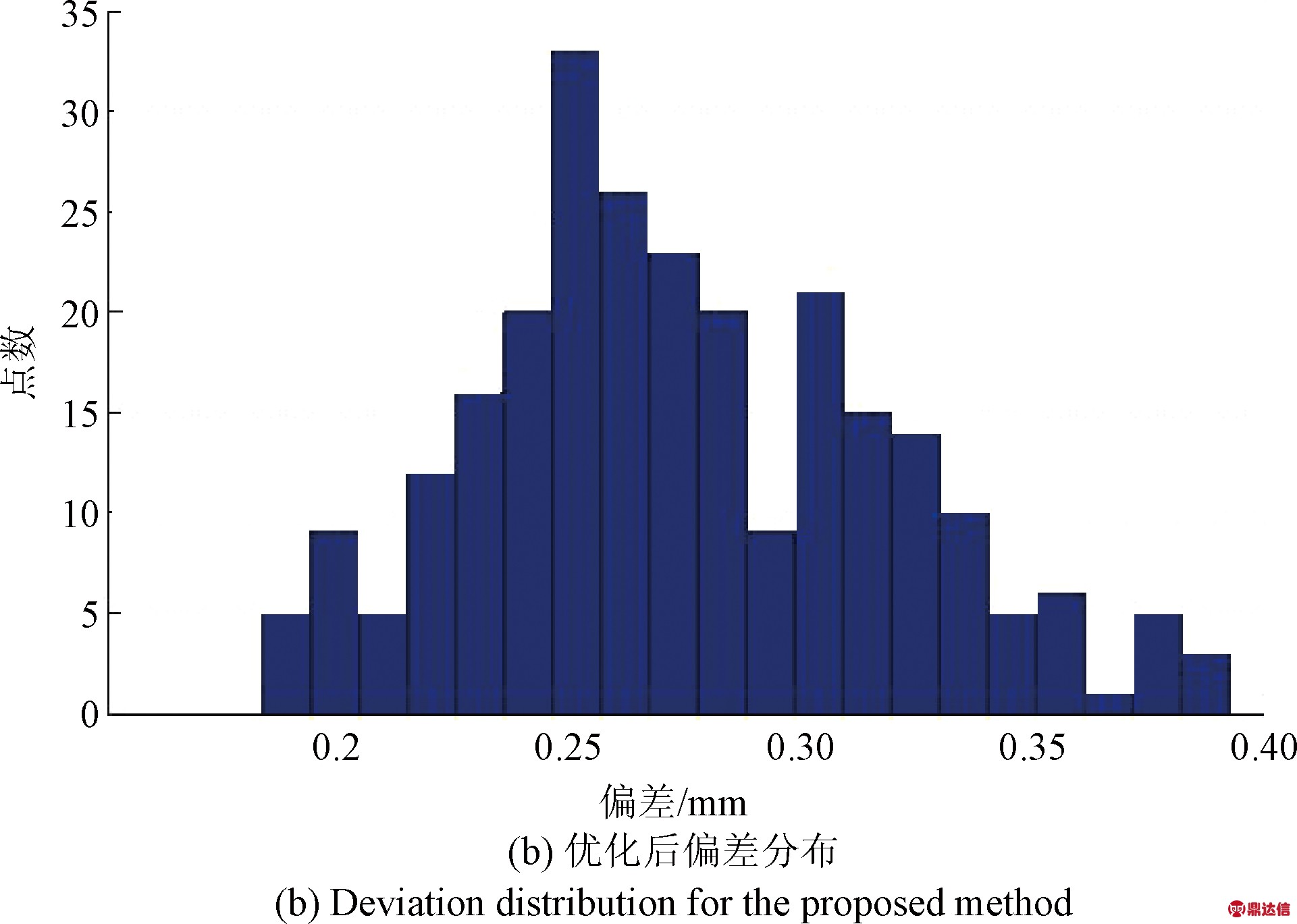
图9 重建偏差分布
Fig.9 Reconstruction deviation distribution
结果表明,2.3节的方法有效减小了重建结果的偏差,使得左、右点云的融合精度上升,提升了多摄像机结构光测量系统的实际应用价值。
4 结 论
提出了一种多摄像机测量系统在无公共视场情况下的标定新方法,依靠投影仪为标定提供额外信息,解决了系统的摄像机全局标定难的问题。该方法和已有的方法相比,具有以下优点:1)投影仪是视觉测量领域的常用设备,相关研究和技术也比较成熟,而比起全站仪、镜面、激光等辅助设备,投影仪对测量更友好,对实际操作的要求也较低;2)标定模型简单,矩阵的相互关系清晰;计算步骤和待求参数少,控制了误差的累积效应,求解过程也更为稳定。


