
摘 要:分析了低压真空断路器的双稳态永磁操动机构的基础上,以微处理器为控制单元,研究了断路器电流三段保护的工作原理。以全波傅里叶算法为测量算法,滤除复杂环境下的高次谐波干扰及恒定直流分量,得到的基波幅值与微处理器的设定值比较后发出指令控制晶闸管基极触发信号,利用晶闸管来控制分合闸线圈中电流的通断。样机测试了三段电流保护性能,并利用仿真工具MATLAB对测试数据进行了分析。实验表明,配电系统发生故障时,所设计的控制器能够在误差允许范围内对断路器实现有效分合闸,从而提高了断路器控制的可靠性,增强了配电系统的稳定性。
关键词:双稳态永磁操动机构 微处理器 全波傅里叶变换 电流三段保护
传统的真空断路器是在万能式断路器的物理结构基础上发展而来的,主要用真空灭弧装置取代传统的灭弧栅进行灭弧,操动机构主要是弹簧操动机构和电磁操动机构[1,2]。在这两种操动结构中,弹簧操动机构复杂、成本高、可靠性较难保证;电磁操动机构结构笨重、合闸线圈消耗功率很大。随着智能电网的快速推进,对智能型开关电器提出了更高的要求[3—6]。因而传统的操动机构逐渐被永磁操动机构代替。国内外很多公司开发出了永磁机构低压真空断路器,该机构的断路器机构简单,机械寿命高,基本实现了免维护,其动态特性及仿真及实验均取得了重大成果[7—10]。国内产品以吉林永大集团公司的YDDLB、YDDLB-S、YDW1系列低压永磁真空断路器为主流。
本文以双稳态永磁操动机构为断路器的执行机构,利用微处理器控制晶闸管基极触发信号,电容的循环充放电为控制回路提供了稳定的工作能源。以全波傅里叶算法作为控制器的测量算法有效滤除了断路器在复杂工作环境下受到的高次谐波干扰及直流分量。结合GB/T 22710—2008中关于低压断路器电子式控制器的规定[11],合理选择了三段电流保护的分合闸整定电流和整定时间,并采取相关保护算法设计了控制器的程序流程图。此外还设计了智能断路器的控制面板和LCD显示界面,并预留了通信接口,因此除了本文设计三段电流保护功能外,控制器还能扩展为集“遥控、遥测、遥调、遥信”四遥功能于一体的智能型断路器。最终的整机试验数据和仿真分析表明本文设计的控制器满足要求。
1 双稳态永磁操动机构及控制原理
1.1 双稳态永磁操动机构
设计的双稳态永磁操动机构如图1所示,分别表示了两种状态,即分闸与合闸状态。该操动机构主要由永磁体、分合闸线圈、动静铁心及驱动杆等部分组成。
如图1左图所示,动铁心上端在永磁体产生的磁场的作用下与上磁极接触,此时永磁体利用动铁心和静铁心提供的低磁阻抗将动铁心上端保持在上磁极,机构处于自然分闸状态。在线圈中没有电流信号的情况下仍能保持分闸状态而不需要消耗任何能量。
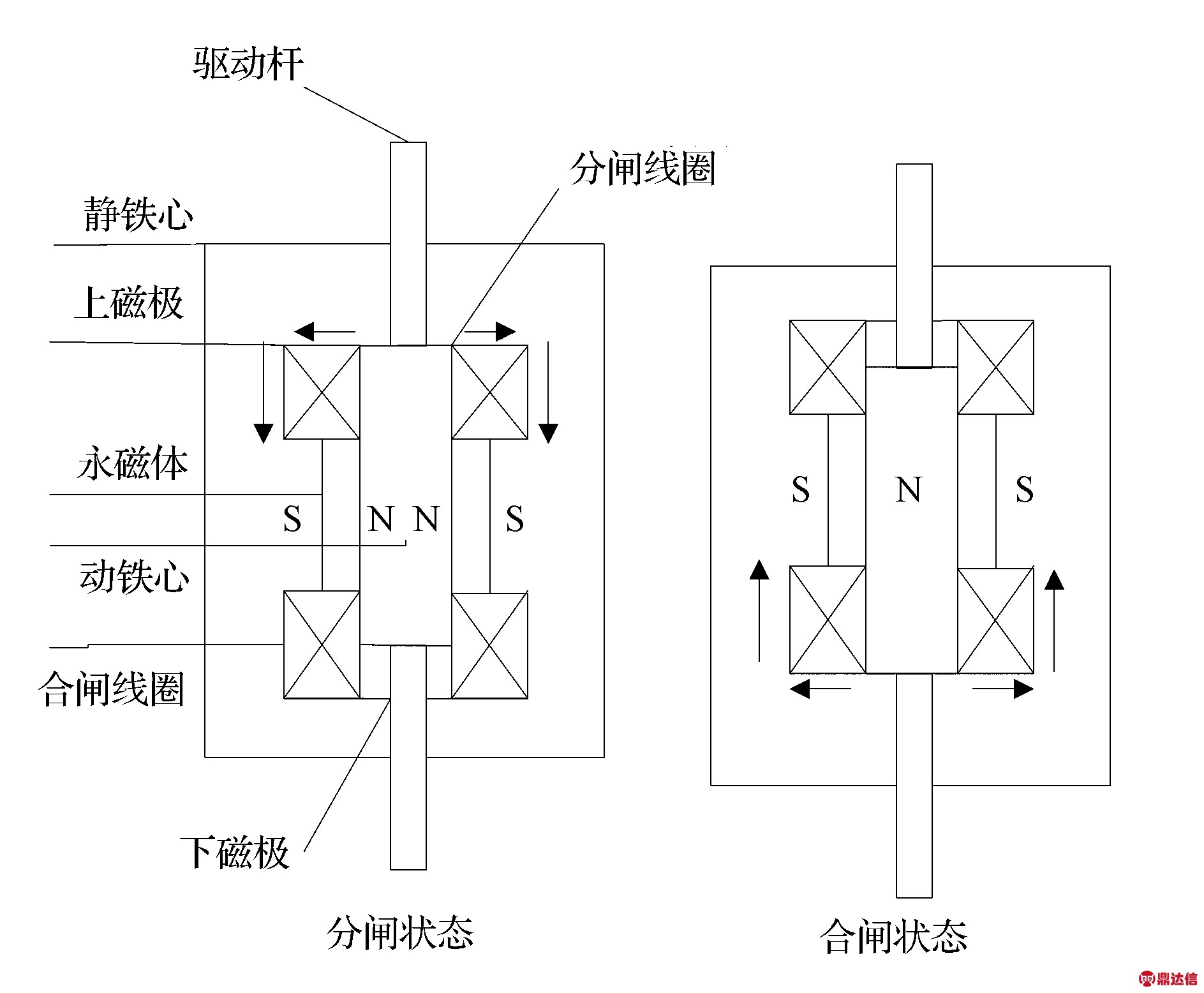
图1 双稳态永磁操动机构
Fig.1 The bistable permanent magnetic actuator
1.2 双稳态永磁操动机构控制原理
如2图所示,断路器处于分闸状态时,晶闸管VT1导通,电容C处于充电状态,VT2、VT3截止,永磁结构的动铁心与静铁心的上磁极接触。当断路器需要合闸时,给晶闸管VT3基极施加触发信号使其导通,放电回路导通,此时C处于放电状态,电容C通过VT3向合闸线圈1放电,在电磁力的作用下,机构动铁心由上磁极运动到下磁极。合闸完成后,去掉VT3中的触发信号使其截止,合闸线圈电感储存的能量通过续流二极管VD2提供续流通路。同理,当断路器处于合闸位置时,通过给晶闸管VT2的基极施加触发信号可以完成断路器的分闸。
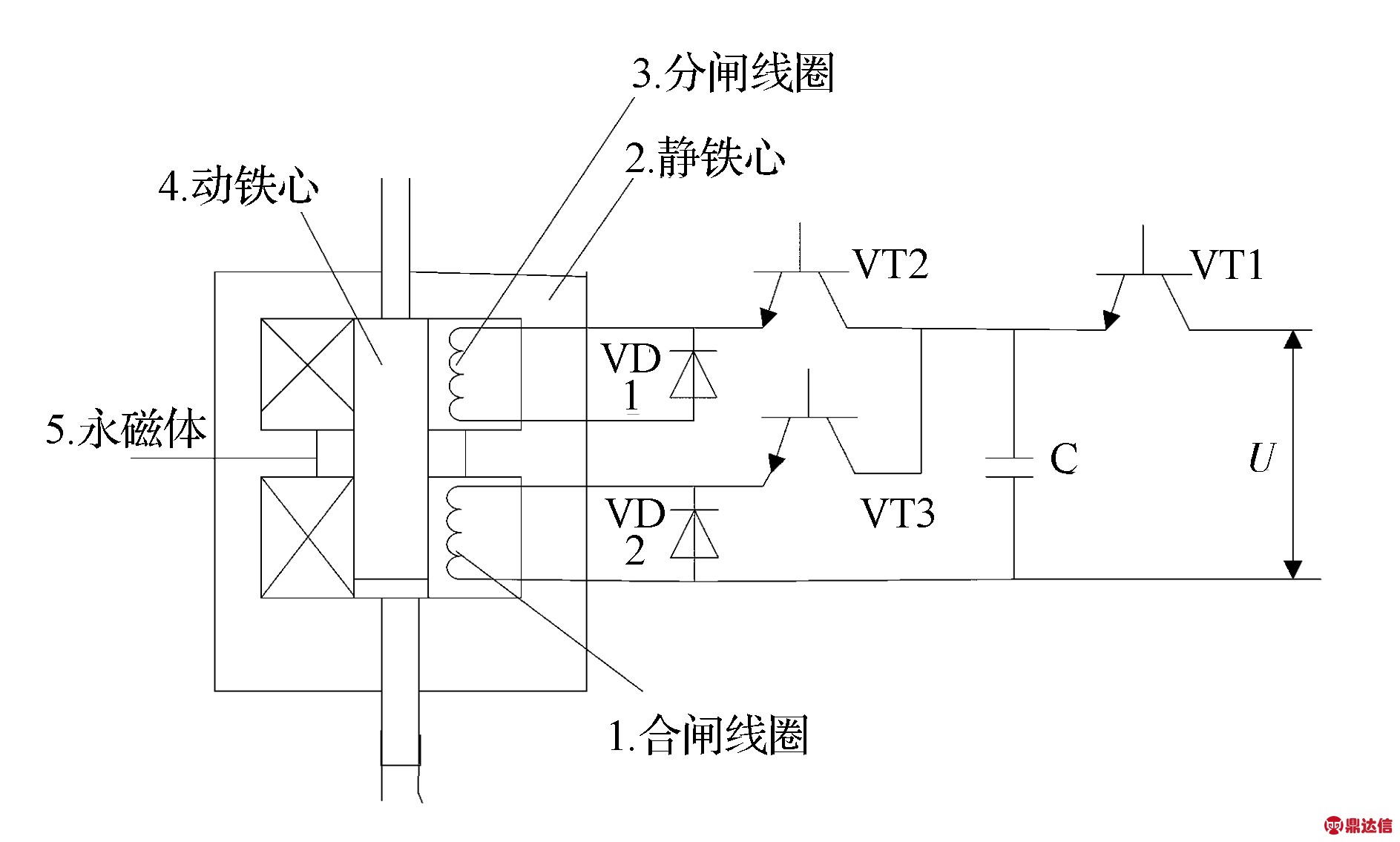
图2 永磁操动机构控制原理图
Fig.2 The control principle of permanent magnetic actuator
2 测量算法分析
配电系统发生故障时,通常在基波上叠加有衰减的非周期分量和各种高频分量,在电压电流的采样后,控制器需要对采集的信号加以处理,本文设计的智能控制器采用全波傅里叶算法作为保护算法。
全波傅里叶算法来自与傅里叶级数,是一种常用的针对周期函数的算法,如式(1)所示。本次设计采样的电流、电压是一个模拟信号,以电流采样为例,主要包括直流分量和包括基波分量在内的各次谐波。
![]() (nwt+αn)=
(nwt+αn)=
![]() [bncosnw+ansinnwt]
[bncosnw+ansinnwt]
(1)
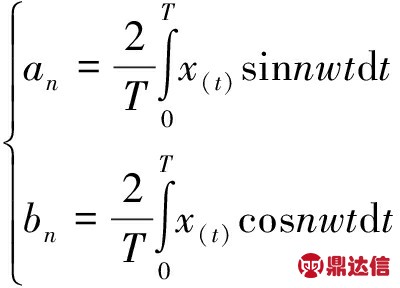
式(1)中,w表示基波频率,an、bn分别表示采样信号中含有的直流、基波、各次谐波的正弦和余弦分量的幅值,Xn为n倍频分量的幅值,αn为t=0时该分量的相角。 其中:
bn=Xnsinαn,an=Xncosαn,根据傅里叶级数的原理可以求出an、bn如式(2)。
(2)
将式(2)离散化可以得到
(3)
式(3)中,N为基波信号一个周期的采样点数,xk为第k次采样值,可知,n=1时可以求出基波分量,正弦和余弦分量的幅值分别为a1、b1。
由公式(3)可以求出n次谐波电流分量幅值和相角为:
(4)
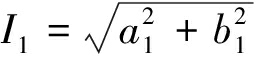
由式(4)可知,电流基波幅值为
![]() 。
。
该算法在电力系统中具有广泛的应用,可以求出各谐波分量的幅值和相角,而且可以有效滤除恒定直流分量和各整次谐波分量,采样点数的增加可以提高采样精度。
3 硬件系统设计
3.1 智能控制器总体设计
如图3所示,智能断路器由信号采集单元、信号处理单元、微处理器单元、操动机构单元及断路器本体等组成,硬件采用模块化设计;电压互感器和电流互感器负责采集线路的相电压、相电流,将配电系统中的交变电信号转换为可测量的电压、电流信号;信号处理单元的处理电路对干扰源进行整流滤波。多路选择可以为信号提供选择通道,不同的信号经由不同的通道送入微处理器进行相应处理。信号进入微处理器后,通过处理器自带的A/D模块将模拟信号转换为数字信号并进行运算处理,得到的运算结果与整定值相比较输出相应的逻辑信号以控制操动机构的分合闸线圈,微处理器的供电有两种方式,一种是自生电源,由电压互感器直接从母线获取,另一种是辅助电源,作为线路发生故障不能为处理器继续提供工作电源时的备用。键盘和人机接口单元为控制器的操作提供直观便利的条件,键盘可以选择需要操作的行为,比如修改保护参数,获取线路运行状态,并预留通信接口。
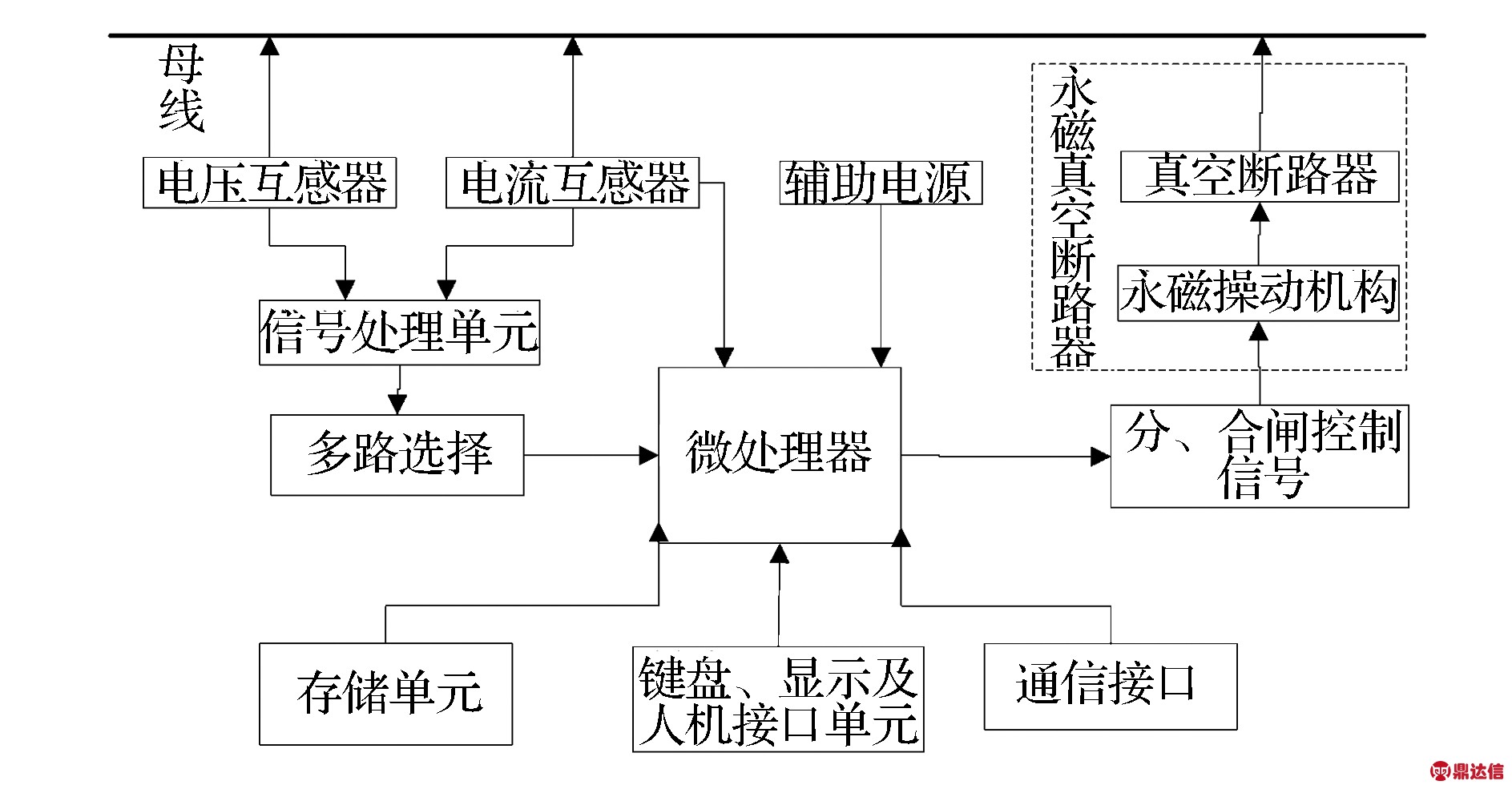
图3 智能断路器整体设计框图
Fig.3 The overall design of the intelligent circuit breaker
3.2 操作面板及人机交互界面设计
在低压智能断路器的实际工作中,操作维护人员往往要知道设备的各项运行参数及运行状态,针对不同的工作环境还需要设定不同的参数,这就要求断路器的控制器单元具备友好的操作面板。本次设计的操作面板如图4所示。
复位按钮用于系统死机或则需要重启时,过载、运行及通信指示灯显示线路的运行状态;In为线路额定电流设置;Ir1、Ir2、Ir3旋钮开关用于保护电流值的整定。LED1、LED2、LED3分别为三种故障指示灯;Tr1、Tr2为过载长延时和短路短延时分闸时间整定,长延时有15 s、30 s、60 s、120 s四个档位,短延时有0.1 s、0.2 s、0.3 s、0.4 s四个档位,瞬动保护为瞬时动作,分闸时间小于200 ms。
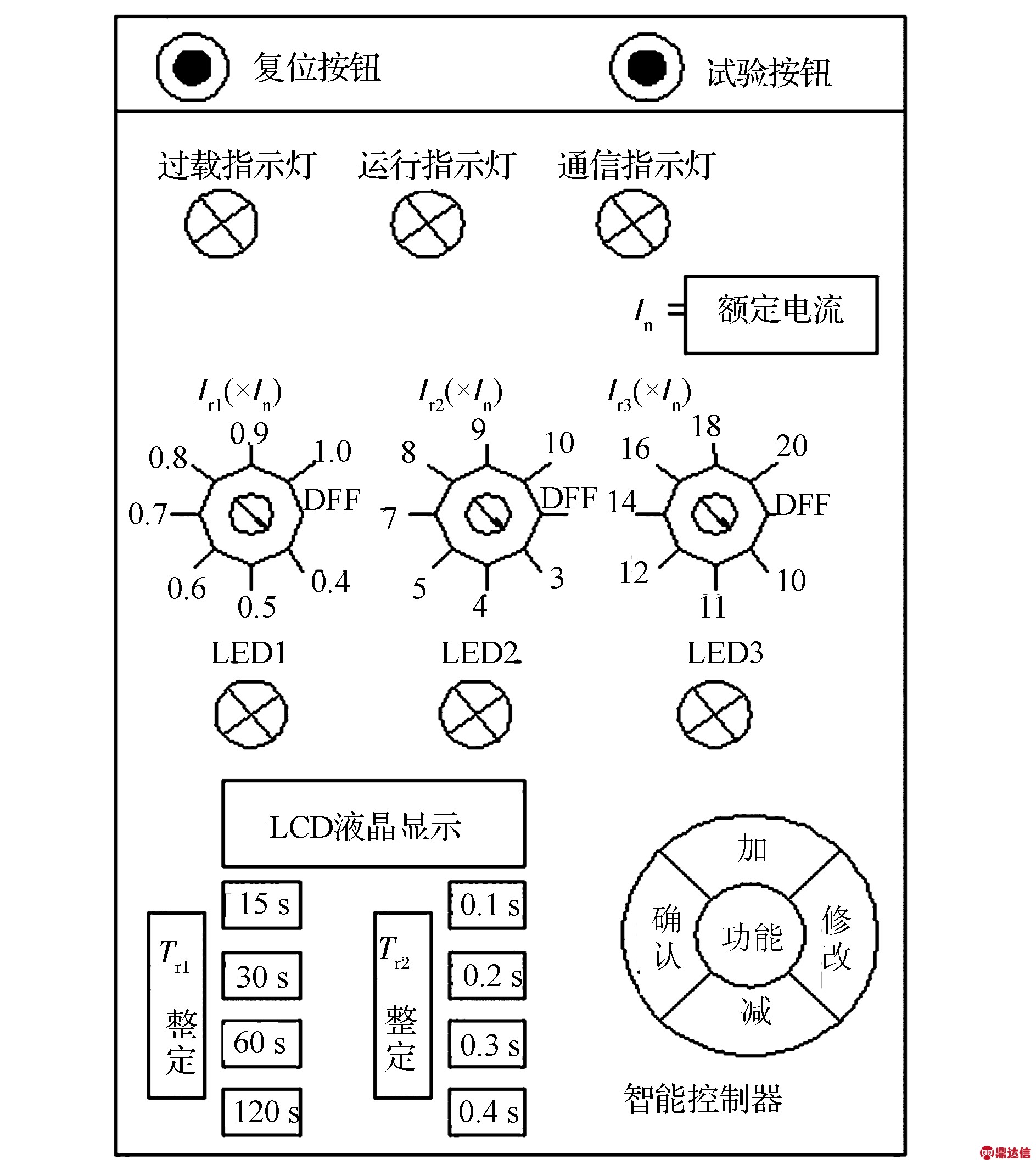
图4 智能控制器人机交互界面
Fig.4 The human computer interaction interface of intelligent controller
4 三段电流保护主程序设计
根据GB/T 22710—2008规定,过载长延时保护特性表现为反时限,过载长延时保护功能一般用来对过负荷进行保护,其数学表达式:
T1=(1.5IR/Ir1)2Tr1
(5)
式(5)中,T1为长延时的动作延时时间,Ir1为过载长延时过电流值,IR为长延时电流保护整定值,其整定值为额定电流In的0.4~1倍,Tr1为长延时动作时间整定值。
短路短延时有两种保护方式,一种是反时限保护,当故障电流超过反时限电流的整定值时,控制器发出分闸信号控制晶闸管执行分闸操作,另一种为定时限保护,当故障电流超过定时限电流整定值时,控制器按定时限延时保护。短路短延时反时限特性的数学表达式为:
T2=(8IR/Ir2)2Tr2
(6)
式(6)中,T2为短延时的动作延时时间,Ir2为短延时过电流值,Tr2为短延时动作时间整定值。该整定值决定过载短延时反时限保护的选择范围,当Ir2>8IR时控制器自动转换为定时限保护[10]。
瞬动保护特性为定时限,整定值一般为1.0In~50 kA/75 kA,如果采样值Ir3大于瞬动保护整定值,则再采样一次,如果采样值还是大于瞬动保护整定值,说明故障出现,此时控制器发出信号使脱扣器立即动作。
根据三段电流的保护特性在配电系统发生故障时,微处理器将故障电流值与整定值作比较,判断故障类型,并输出逻辑信号给晶闸管,通过晶闸管控制操动机构对断路器进行相应的合闸和分闸处理。电流三段保护的程序设计流程图如图5所示。
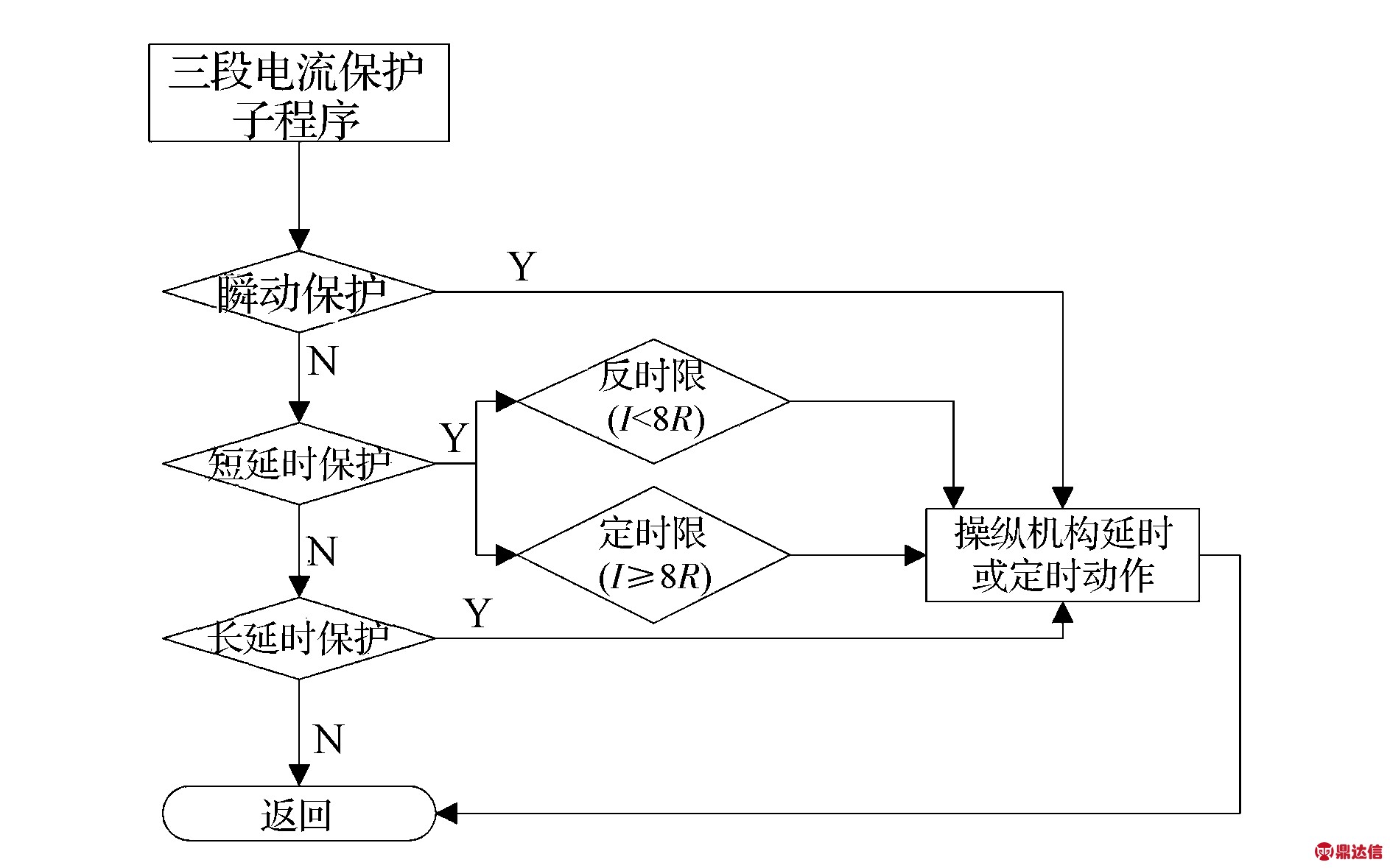
图5 电流三段保护子程序流程图
Fig.5 The flow diagram of the three section of the current protection
5 实验结果分析
实验过程中,设定系统测试的额定电流为In=400 mA,过载长延时电流保护整定值为IR=0.8In=320 mA,取短路短延时电流整定值为3IR=960 mA,瞬动保护的电流整定值为10IR=3 200 mA。过载长延时保护的延时动作时间整定值可以通过按键选择15、30、60、120。短路短延时延时动作的整定时间可以选择0.1、0.2、0.3、0.4,当故障电流大于3 200 mA时,进行瞬动保护动作。表1和图6表示过载长延时的实验数据和matlab仿真曲线,表2和图7为短路短延时过载长延时的实验数据和matlab仿真曲线。
表1 过载长延时保护测试数据
Table 1 The protection test data of overload long time delay
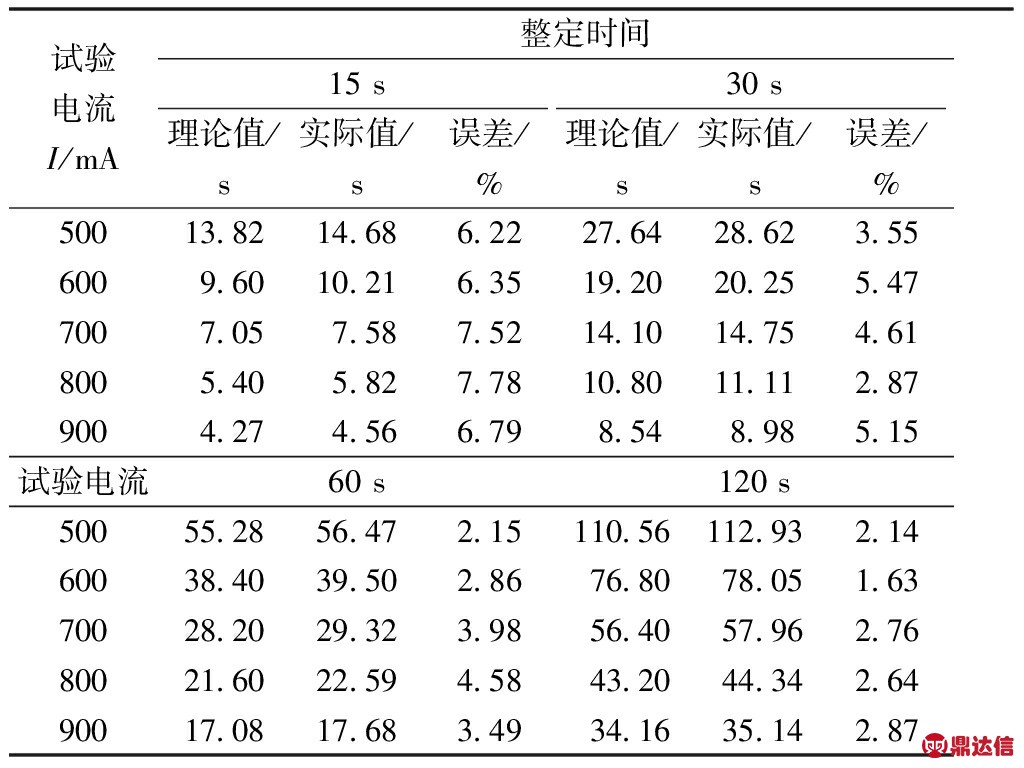
由表1和表2中的测试数据可以看出,在测试电流大于动作延时要求时,不同的实验电流在不同的整定时间下得出的实验结果均与理论值有出入,但是误差均在±10%的范围内,符合GB/22710—2008中的要求。图6和图7是用Matlab绘制的保护特性测试曲线,由曲线可以看出,过载长延时的特性曲线符合其反时限的特征,即同一档位的整定时间下,故障电流越大,延时时间越短,合闸速度越快,短延时特性曲线的反时限特性与长延时相似,当故障电流大于8IR时,延时时间不再变化,为定时限。
表2 短路短延时保护测试数据
Table 2 The protection test data of short circuit short time delay
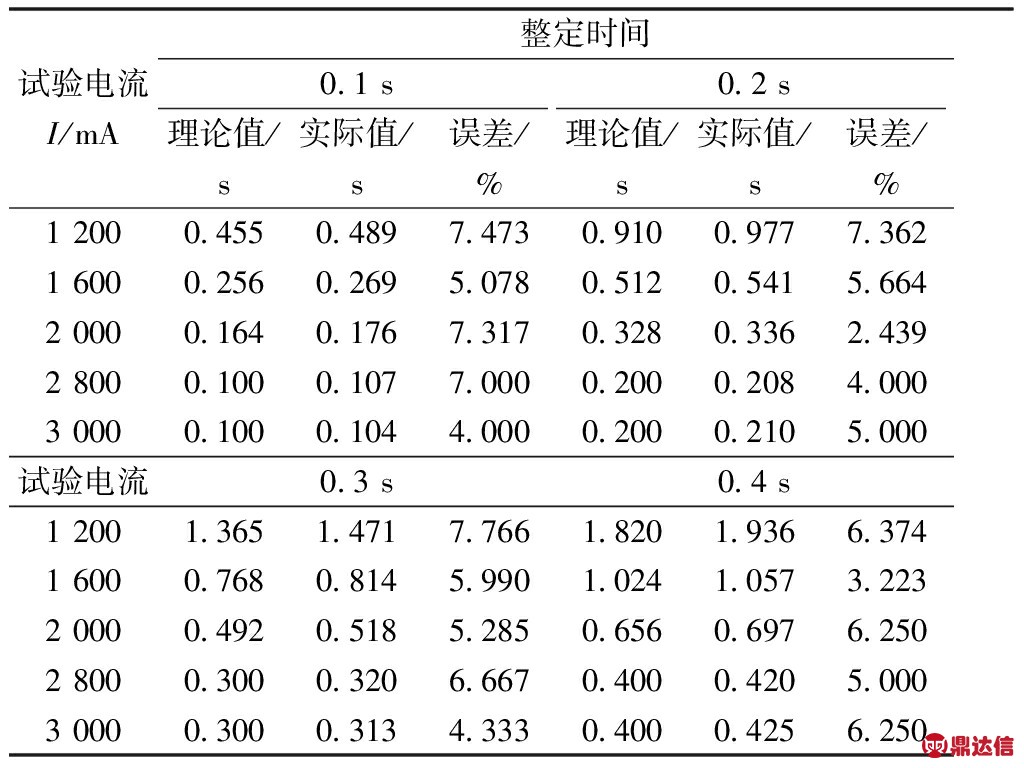
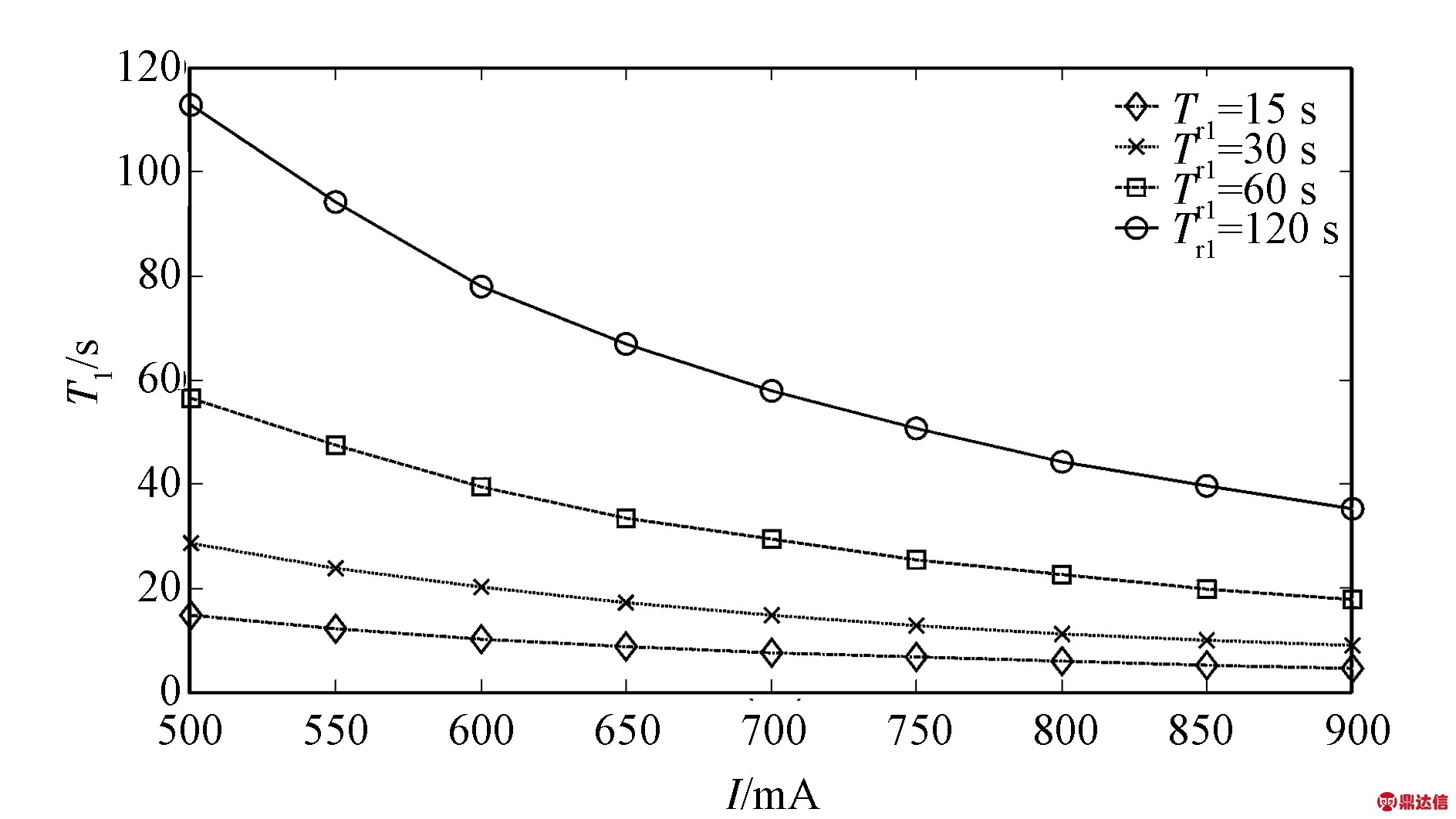
图6 过载长延时保护特性测试曲线
Fig.6 The test curve of overload and long time delay protection
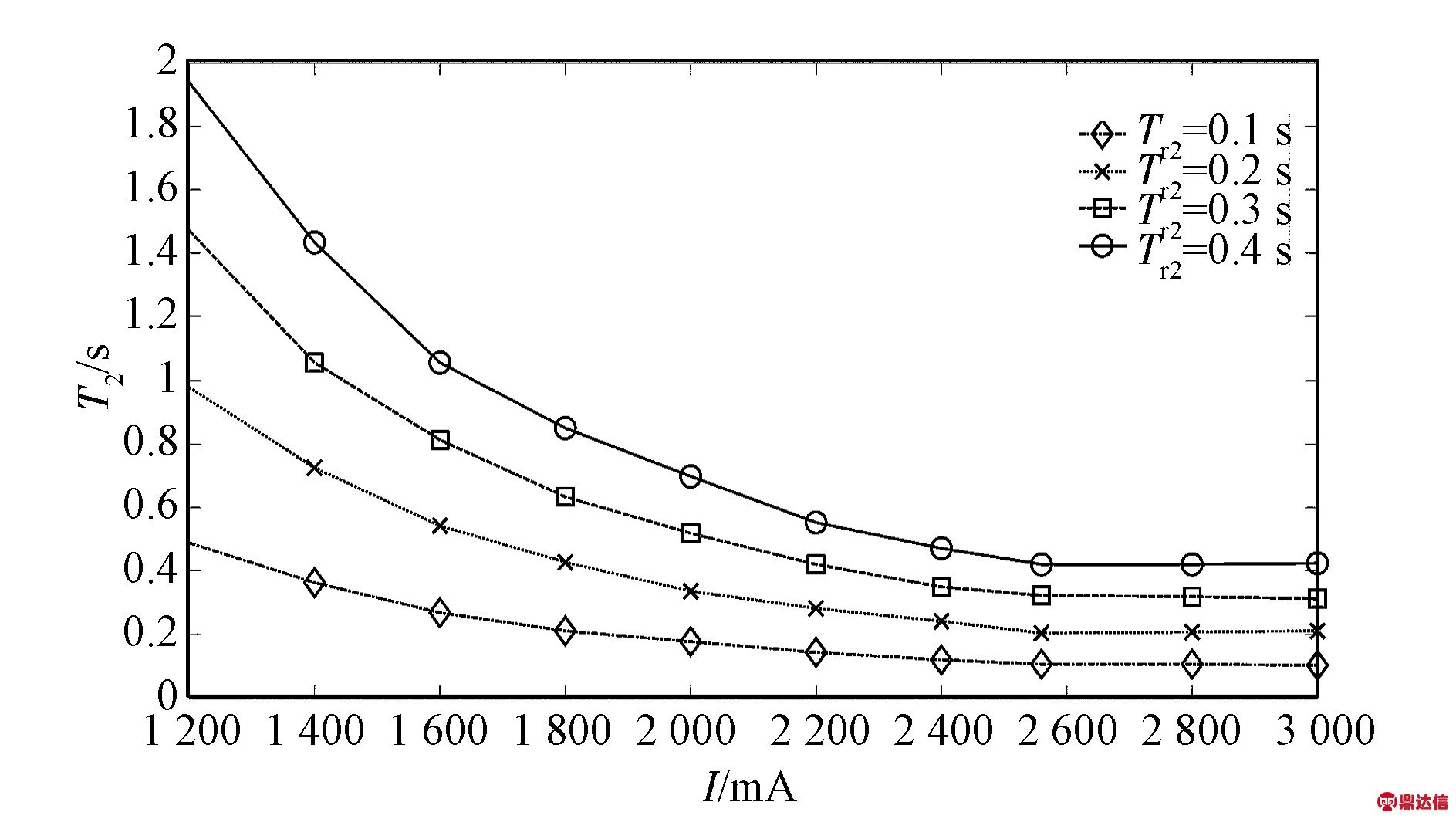
图7 短路短延时保护特性测试曲线
Fig.7 The test curve of short circuit short time delay protection characteristic
6 结论
本文利用永磁双稳态机构作为智能断路器的操动机构,以微处理器为控制单元,负责整个控制器的测量、保护和控制功能,并预留了通信接口,为实现断路器的四遥功能提供了基础。文章采用全波傅里叶算法有效地滤除了断路器在复杂工作环境中受到的各种非基波干扰信号,设计的操作面板与显示面板帮助用户快速准确地设置和获取断路器的各种参数。测试数据和仿真结果表明,本次设计的双稳态永磁低压智能断路器符合GB/T 22710——2008规定,满足设计要求。


