
摘要: 低压直流配电网通过母线分段降低了每段母线所承担的功率容量,使大范围内的直流供电成为可能。考虑配电网负荷多元化及用电的随机性,直流母线电压会时有波动,因此需在敏感负荷区配置储能装置,以提高供电质量及供电可靠性。为此,文中首先选取并实现了三重化DC/DC换流器拓扑以增大储能换流器(SC)容量,以及提高母线失电状态下储能装置的供电时间;同时基于载波移相的定电压控制,在减小电压偏差的同时降低电流纹波,从而提高电能质量。其次,为应对配电网内功率波动,缩短暂态响应过程,对SC输出电流的动态响应过程进行了深入分析并建立了小信号模型;基于动态过程分析设计了将电压偏差引入电流内环的前馈控制策略,且进行了缺陷分析与改善设计。最后进行了实验验证。
关键词: 低压直流配电网; 敏感负荷; 储能换流器; 动态响应; 前馈控制
0 引言
作为清洁能源利用的一种形式,直流微电网是近年来研究的热点[1-3]。但是受导体截面积、载流量等参数的限制,直流母线所能承担的功率容量有限,无法满足日益增长的微电网负荷需求,部分学者提出中低压直流配电网的解决方案[4-8],其中低压直流配电网处的敏感负荷需配以储能装置以提高供电可靠性,保证孤网模式下短时间内正常运行。由于配电网负荷的多元化及用电的随机性,因此直流母线电压会因负荷的变化而出现波动,进而影响敏感负荷的供电质量。本文就储能换流器(storage converter,SC)的控制方法展开研究,以实现对母线电压的快速响应。
根据换流器容量、拓扑及控制目标的差异,SC的控制策略也会不同[9-11]。目前主流的控制分为下垂控制与定电压控制两种。文献[9]基于下垂控制设计了一种经济最优控制策略,通过修改下垂系数实现电网运行成本的最小化。文献[10]基于低带宽通信设计了一种下垂控制策略,以实现直流微电网的定电压恢复与均流控制;但是在稳态情况下会存在电压偏差,影响供电质量,因此对于容量相对较小的敏感负荷区,应优先选用定电压控制。对于单台SC运行的工况,基本的定电压控制相对简单,但是如何提高控制器对负载电流的响应速度、减小电压恢复的响应时间是提高SC运行性能的关键技术问题。
负载电流前馈控制方法在脉宽调制(pulse width modulation,PWM)整流器、逆变器等电路中已得到了较多的应用[11-13]。针对前馈控制在SC中的应用,国内外已展开了较多研究[14-19]。文献[15]提出了一种电压前馈的闭环控制方法,但受电感等电路参数的影响较大,可移植性较差。文献[16]针对Buck换流器提出了一种自适应控制方法,可实现对电压扰动的抑制。文献[17]将输入电压引入前馈控制电路,通过快速改变占空比来减小输入电压波动对输出电压的影响。文献[18]将投切负载时SC输出侧电容电流的变化量引入前馈回路,进而直接改变开关元件导通和关断实现快速响应。文献[19]提出的DC/DC换流器前馈控制策略利用换流器的数学模型,通过电流比例环节修正模型误差,进而实现换流器的快速响应。
上述文献提出的DC/DC换流器前馈控制策略大多用于功率较小的场合,且对换流器电流的动态响应过程的研究仍然不够充分。本文以提高低压直流配电网中敏感负荷供电可靠性及电能质量为出发点,选择并实现了三重化DC/DC换流器。采用基于载波移相的定电压控制,以提高供电可靠性及电能质量;其次为优化暂态过程,对SC输出电流的动态响应过程进行了深入分析,基于此设计了将电压偏差引入电流内环前馈控制策略,并对此策略进行了详细设计与完善。
1 SC拓扑选取及控制器参数设计
直流配电网不存在无功、频率、相位等问题,其电能质量主要表现为电压偏差,可通过增大SC容量延长低压母线失电时敏感负荷的正常工作时间,并通过大容量单台换流器定电压控制减小电压偏差,从而提高电能质量。故本文采用三重化SC拓扑[11],相比于单桥臂换流器具有更大的容量;相比于3个单桥臂换流器并联降低了控制的复杂性,也避免了小容量SC并联时采用下垂控制引起的电压偏差。下文中将3个桥臂分别称为A,B,C三相,其控制方式采用基于载波移相的定电压控制,如图1所示,使得三相输出电流相互交错,等效开关频率扩大为原来的3倍, 在增大换流器容量的同时可提高总输出电流的响应频率。图1中:Uref为直流母线参考电压;udc为直流母线实际电压;iref为三相电流的指令值;ia,ib,ic分别为A,B,C三相电流值;da,db,dc为各相桥臂的占空比;T为载波周期;PI为比例—积分环节。
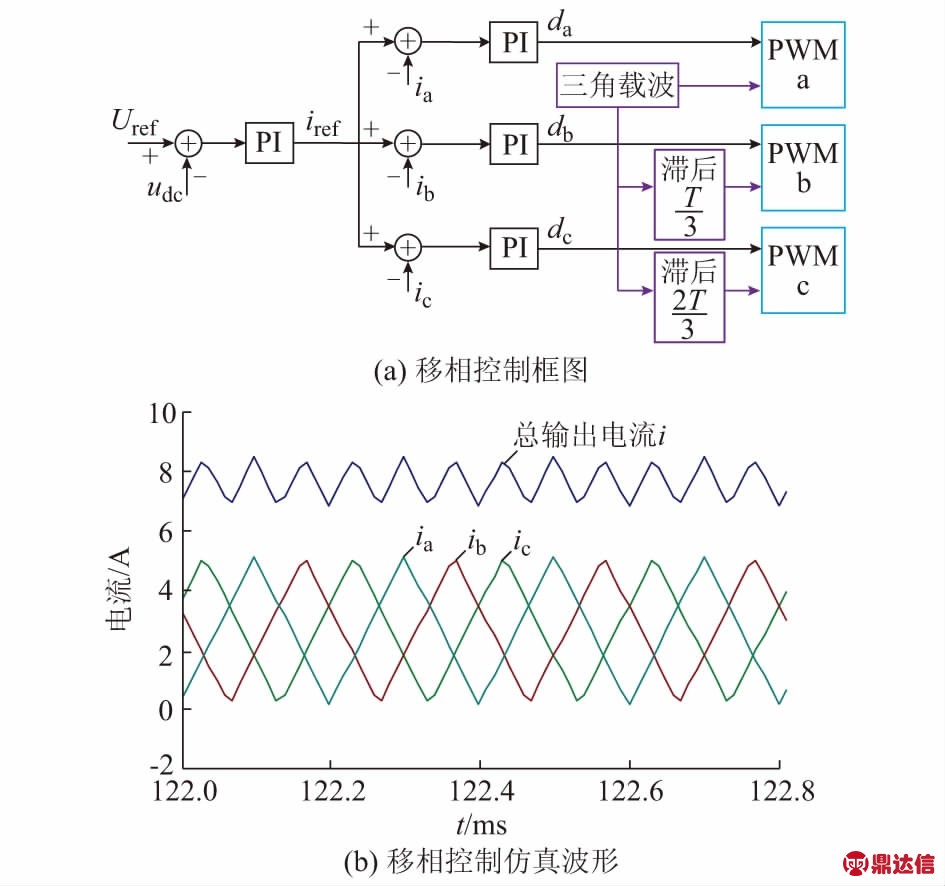
图1 载波移相控制策略
Fig.1 Phase-shift carrier control strategy
从图1中可以看出三相桥臂的载波依次滞后1/3周期。由于双闭环控制器参数设计的过程不是本文重点,这里直接给出,并进行了稳定性验证。各相桥臂对应电感L为1 mH,高压侧稳压电容C为5 000 μF,外环PI参数kpu=1.0,kiu=0.8,内环PI参数kpi=0.02,kii=0.005,工作频率为12 kHz。由上述参数下的根轨迹曲线(见附录A图A1)可以看出,系统特征值均位于左半平面,附录A图A1(a)中的1个极点较小,其暂态分量衰减较快;且图A1(c)中2个极点与零点对消,因此图A1(b)中的极点(实部值约为-67)为主导极点,可保证控制系统的稳定性。
2 动态过程分析
对于三重化SC拓扑,设任一时刻高压侧电压为u,低压侧电压为E,则
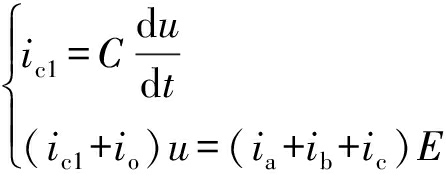
(1)
式中:ic1为流入稳压电容的电流;io为负载电流。
由式(1)可知当负载功率突变时,由于三相电流无法突变,需依靠稳压电容平衡功率进而导致直流母线电压波动。本节动态过程的分析与SC是否三重化无关,可等效成单相分析,下文中以iabc代表三相电流。
设该时刻任意桥臂的下桥臂占空比为d,电感电流正方向为低压侧流向高压侧,则各桥臂任意开关周期内的电流增量Δiabc为:
![]()
(2)
在稳态情况下,有Δiabc=0。
由于在实际工程中,SC的控制过程一般为基于数字信号处理器(DSP)的离散过程,对于任意桥臂,在每个开关周期内都会对相应桥臂进行一次PI计算,且该周期内计算结果保持不变,从而对相应桥臂的占空比进行调整。设零时刻换流器运行在稳态,参考电流指令值与三相初始电流值相同。负载突变瞬间由于三相桥臂输出电流不能突变,因而无法满足负载需求,此时母线电压发生变化。设由此引起的第1个开关周期中电流指令值的变化量为Δiref(1),则
Δiref(1)=iref(1)-iref(0)=iref(1)-iabc(0)
(3)
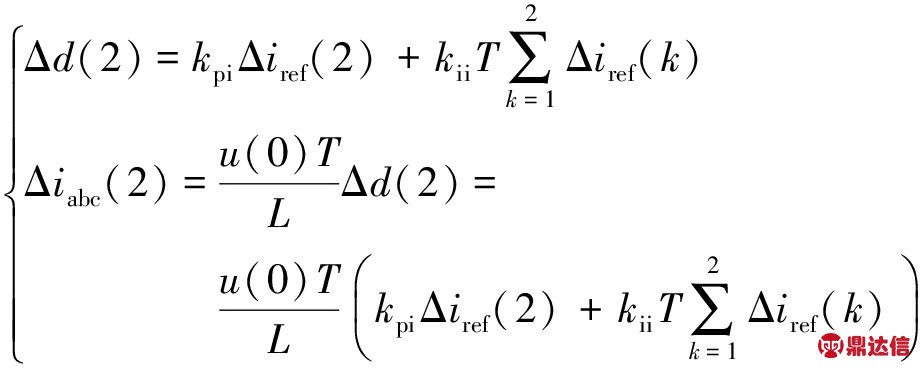
其对应占空比变化量Δd(1)为:
Δd(1)=kpiΔiref(1)+kiiTΔiref(1)
(4)
由式(2)可知电流的变化量Δiabc(1)为:
![]()
(5)
假设Δu(1)为高压侧电压增量,考虑到
Δu(1)(1-d-Δd(1))≪u(0)Δd(1)
(6)
可将式(5)改写为:
![]()
(7)
因此下一开关周期电流改变量的指令值为:
Δiref(2)=Δiref(1)-Δiabc(1)
(8)
同理可得:
(9)
由递推关系可得式(10),其中n≥2。
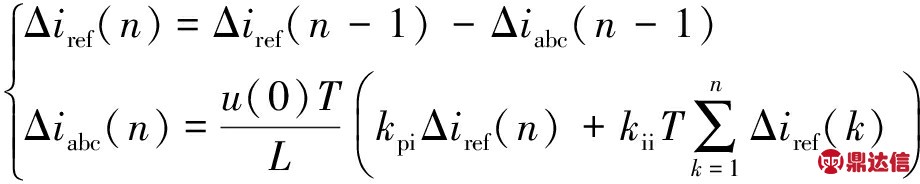
(10)
由式(10)可以看出,电流内环的调节速度Δiabc(n)与电压外环的PI参数、参考电流与实际电流的差值Δiref(k)均正相关,k≤n。
3 前馈控制策略设计与改善
3.1 前馈控制策略的初步设计
根据第2节分析可知,电流内环的调节速度Δiabc(n)与电压外环PI参数、参考电流与实际电流的差值Δiref(k)均正相关,k≤n。其中影响电流响应速度的直接原因是Δiref(k)的大小,因此本节设计如图2(a)所示的前馈控制策略以求在同等电压偏差下增大电流指令值,传递函数如式(11)和式(12)所示,其中Gf(s)为前馈环节。
![]()
(11)
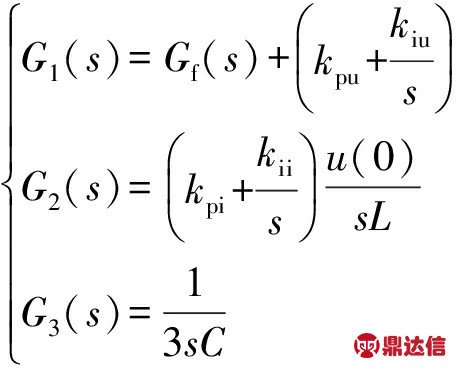
(12)
但是对于双环控制电流指令值由电压外环PI参数计算输出,因此为设计合适的Gf(s),本节就电压外环PI参数对动态性能的影响作如下分析,其中u(0)设置为500 V。
如图3(a)所示为调节电压外环比例参数kpu时的波特图,kpu的调节范围设置为0.2至6.0。由图3(a)可以看出外环比例参数对系统带宽的影响较为明显,系统带宽随外环比例参数的增加而增加。图3(b)所示为调节电压外环积分参数kiu时的波特图,kiu的调节范围设置为0.1至5.0。由图3(b)可以看出外环积分参数的变化对带宽的调节作用不明显。值得一提的是,在电压外环参数调节的过程中,系统特征值分布均在左半平面,可保证系统的稳定性,考虑篇幅原因,这里不再呈现。
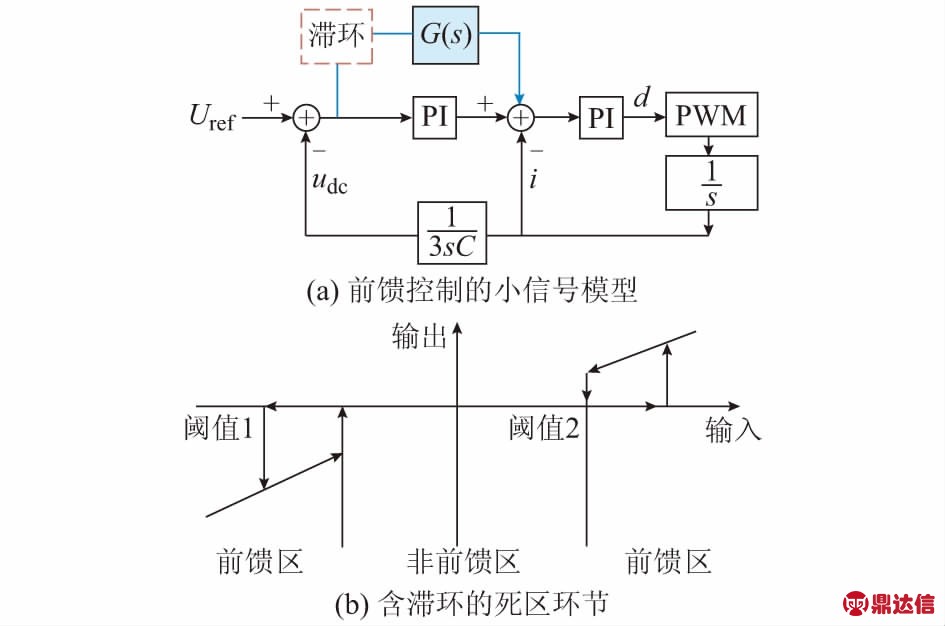
图2 前馈控制策略初步设计
Fig.2 Primary design of feedforward control strategy
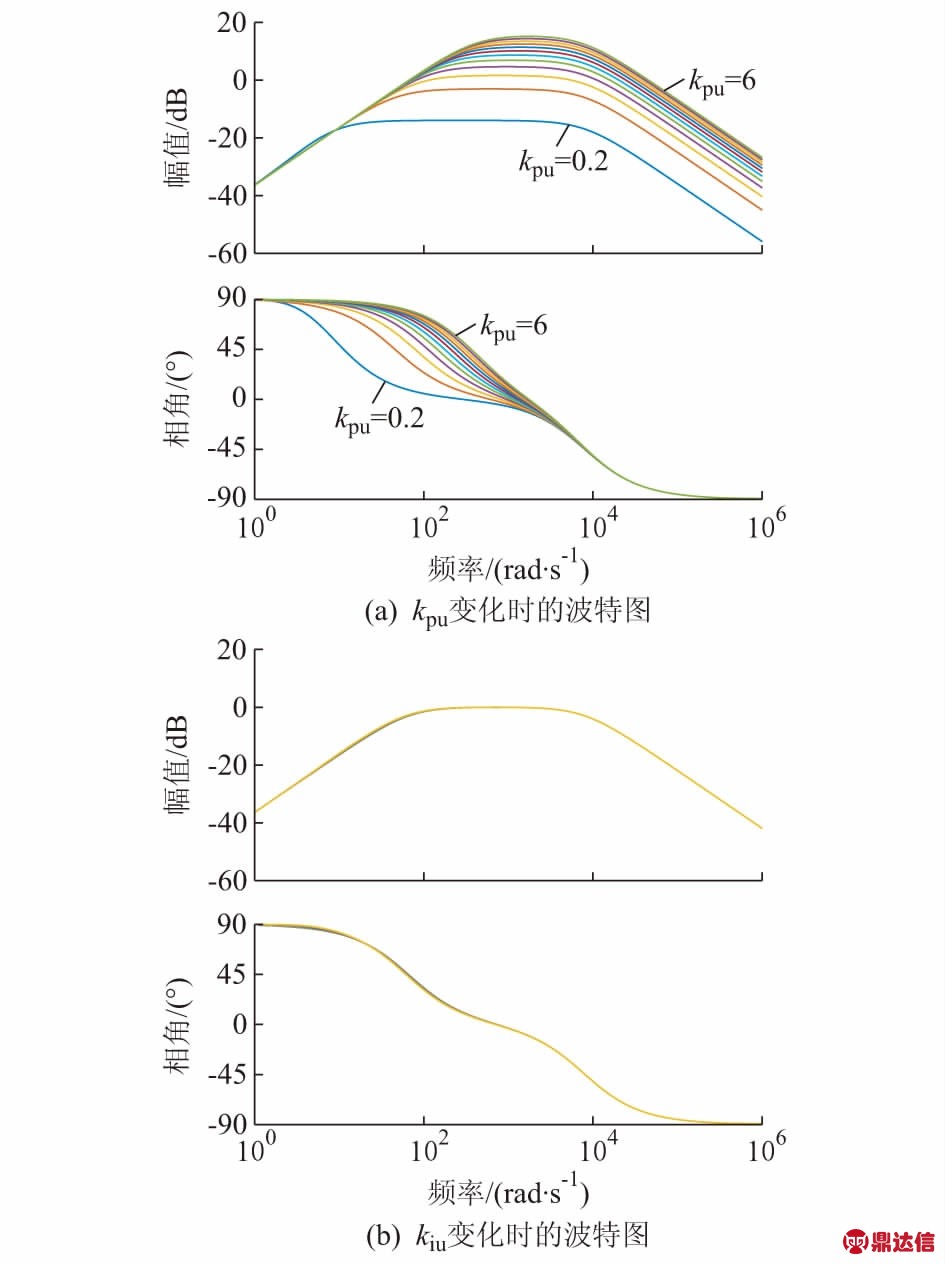
图3 kpu和kiu变化时的波特图
Fig.3 Bode diagram with kpu and kiu change
基于上述分析,本文将前馈环节设置为比例环节,考虑到SC输出电压及总输出电流的响应频率为单相桥臂开关频率的3倍,并保证系统具有一定的抗干扰能力,因此将系统带宽定在105 rad/s左右,故选取Gf(s)=2.0(需要说明的是,12 kHz×3×2π≈2×105 rad/s,Gf(s)=2.0时,此时带宽为105rad/s,见附录A图A2)。且由图3相频特性可以看出,选取Gf(s)=2.0不会给控制系统带来额外延时。图4为Gf(s)=2.0时的根轨迹图,系统特征根均位于左半平面,主导特征根实部约为-200,可保证控制系统的稳定性。其次,前馈环节的设置在增加带宽的同时使系统的抗干扰能力有了一定的削弱,因此在稳态情况下不希望启动前馈环节,故本文在前馈环中加入滞环环节,如图2(b)所示,阈值的选取应综合考虑敏感负荷的要求与控制的难易程度,在后续的实验中,本文取阈值1为±2%,阈值2为±3%,环宽为1%。
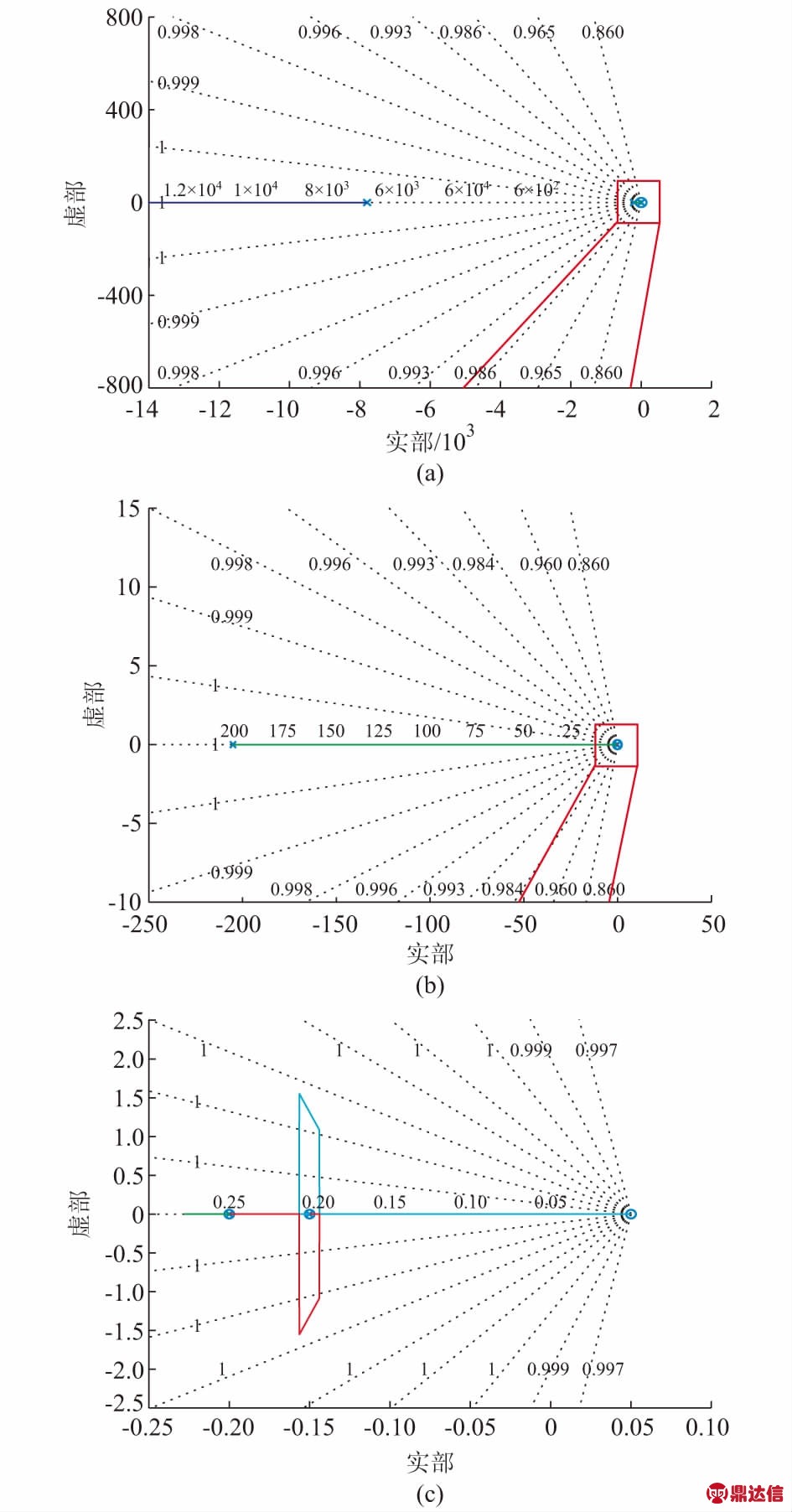
图4 Gf(s)=2.0时的根轨迹
Fig.4 Root locus with Gf(s)=2.0
3.2 前馈控制策略缺陷分析及改善方案
第3.1节中将在前馈环中加入滞环环节,可以有效抑制母线电压波动幅值,但仍然存在一定缺陷。如突加负载时,前馈控制可能将电压母线由前馈区拉至非前馈区,而外环PI输出的电流指令值未达到满足当前负载的电流值,此时电流会在此下降,从而将母线电压重新拉回至前馈区并重新启动前馈,造成SC三相电流反复冲击、电压母线在前馈区与非前馈区间的反复波动,且由于这种控制减小了电压的总体跌落,使得此种波动持续较久。突减负载时也会产生类似情况,实验验证见本文第4节。
前馈控制缺陷本质上是由于前馈控制反复启动,进而参考电流反复变化导致的。若每次启动前馈后,保持前馈状态足够长的时间,使得原PI环节输出的电流指令值经过积分计算达到负载所需,然后进行再次判断是否回到无前馈状态,则可避免这种波动。由于前馈控制部分是参考电压与实际电压做差后通过比例环节输出的,因此在没有积分环节的情况下依然会存在稳态误差,使得PI环节可以对指令电流持续进行积分计算,但是如何选择合适的前馈保持时间需要进一步分析。
设负载突变后引起的电压偏差为Δu(t),所需SC输出电流的变化量为Δiref(t),gf(t)为Gf(s)的时域变换量,则可以得到:
(kpu+gf(t))Δu(t)+kiu![]() Δu(t)dt=Δiref(t)
Δu(t)dt=Δiref(t)
(13)
设前馈触发瞬间为零时刻,可以近似认为初始时刻积分环节输出的电流指令值分量为0,前馈控制以及外环比例环节在前馈触发瞬间的初始值为Δiref,即
(kpu+gf(t))Δu(0)=Δiref
(14)
由式(13)和式(14)可以解得:
![]()
(15)
gf(t)Δu(t)+kiu![]() Δu(t)dt=
Δu(t)dt=

(16)
其中,式(16)为积分环节输出的电流指令值分量。因此,可以通过选择合适的前馈保持时间Tk以让前馈控制环节持续一段时间,直到原PI环节输出的电流指令值分量占负载所需电流变化量的百分比达到某一阈值,即达到电流指令值对负载所需电流跟随的目的,以减少前馈环节的往复切换。
假设η为前馈控制结束后积分环节输出的电流指令值分量占负载所需电流变化量的百分比,则由式(16)可得:
![]()
(17)
本文实验中η设为70%,则Tk≈400 ms。
4 实验验证
为便于分析,本文首先通过PSCAD仿真验证了移相控制策略的有效性,单相开关频率设置为5 000 Hz,如图1(b)中所示,总输出电流平均值及纹波频率均约为单相电流的3倍,即通过多重化在提高换流器容量的同时提高了响应电流的纹波频率。然后基于DSPF28335搭建了三重化SC物理实验平台(见附录A图A3),可实现三相电流相互交错(实验波形见附录A图A4)。在后续的实验过程中(高压侧)直流母线电压设定为500 V,(低压侧)蓄电池电压为200 V。实验中各参数设置与前文分析过程中一致,这里不再赘述(参数详细设置见附录A表A1)。
4.1 前馈控制策略
在实际运行中,当直流负载发生较大变化时,直流母线电压会产生较大跌落且回复时间相对较长。本文在3.1节分析中发现外环比例参数对控制系统的暂态性能影响较大,因此将前馈控制环节设置为比例环节,但是比例参数过大会影响系统的抗干扰能力。实验波形如图5(a)所示,此时Gf(s)设置为5.0,从电流波形可以明显看出控制系统抗干扰能力较差。
综合考虑带宽及抗干扰能力,3.2节中将Gf设置为2.0,但是由波特图分析可知,相比于无前馈控制时其抗干扰能力依然有所下降,因此在前馈控制环中加入滞环环节,使得稳态情况下退出前馈控制环节,保持较好的抗干扰能力。但是此种方法仍然具有一定的缺陷,由3.2节中分析可知,由于参考电流反复变化导致前馈环节的反复启动,造成三相电流的反复冲击,降低电能质量甚至会造成保护误动作。3.2节通过设置前馈保持时间,以改善前馈控制的此缺陷。如图5(b)所示为在没有加入前馈控制的情况下突加5 kW负载直流母线电压及A相电流波形,其电压跌落峰值为84 V,电流响应时间约为400 ms;图5(c)为相同负载下加入前馈策略下的实验波形,对比可知前馈控制增加了电流的响应速度,有效减少了电压跌落,这与3.1节中的分析相一致。但是,由于电流指令值未达到满足当前负载的电流值,因此母线电压在前馈区与非前馈区间的反复波动造成前馈控制反复投入与退出,进而造成换流器内部电流反复冲击,这与3.2节中的理论分析相一致。
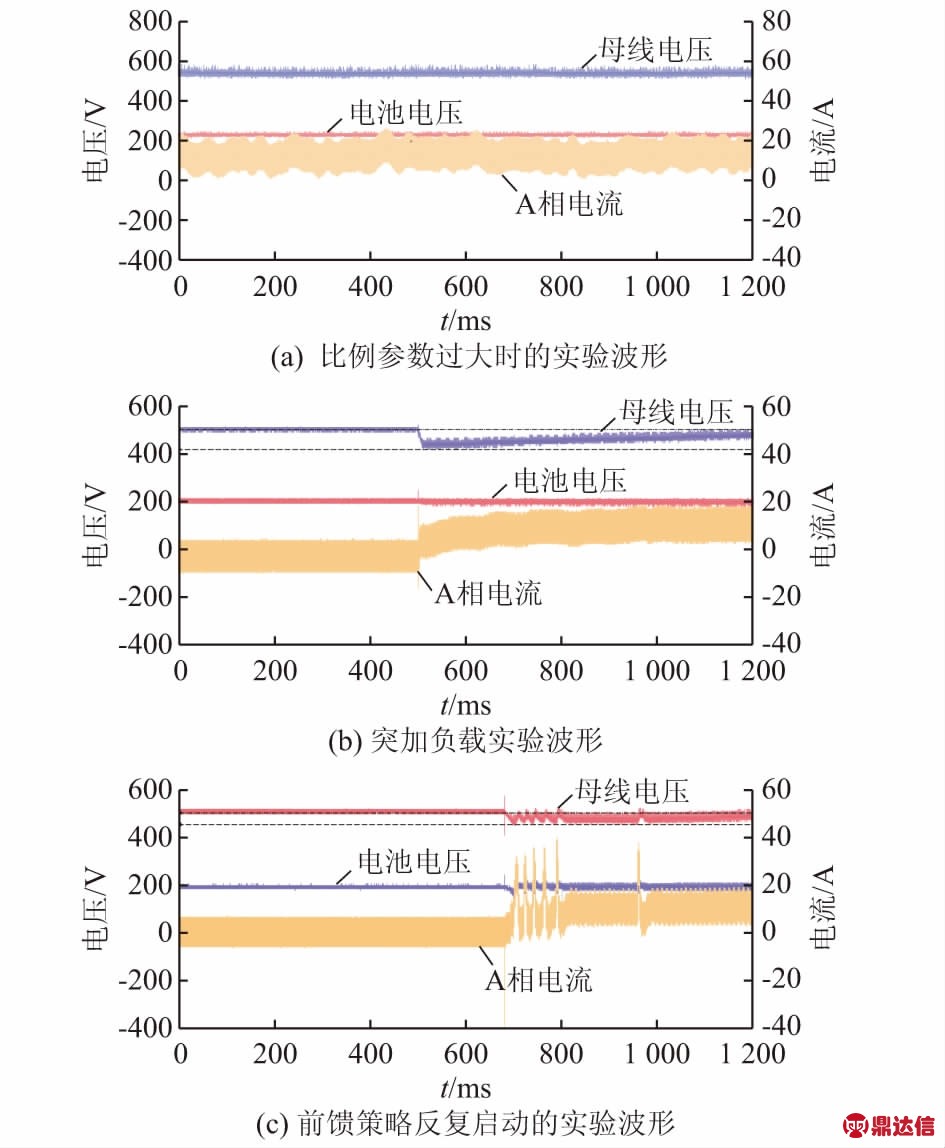
图5 前馈控制策略实验波形
Fig.5 Experiment waveforms of feedforward control strategy
4.2 前馈控制改进策略
为了验证3.2节改进策略的正确性,本文利用物理实验平台进行了实验。实验中Tk设置为400 ms。图6(a)为投入5 kW负载时加入前馈控制改进策略的母线电压及A相电流波形,由图6可以看出,在负载投入瞬间电压跌落为52 V,对比图5(b)中未加入前馈策略时的波形,其电压跌落减小了32 V,其电压恢复时间也由原来的600 ms左右减为50 ms左右。对比图5(c)中未加入改进策略的前馈控制波形,图6(a)中不再出现往复投入与退出的情况。图6(b)和图6(c)为切除负载时的母线电压及A相电流波形,其中图6(b)为未加入前馈控制改进策略时的实验波形,负载切除瞬间其电压暂升92 V,电压恢复时间约为500 ms;图6(c)为加入前馈控制改进策略后的实验波形,负载切除瞬间其电压暂升约为40 V,电压恢复时间为200 ms。相比图6(b)其电压暂升下降了52 V,电压恢复时间缩短了300 ms左右。上述实验说明了改进前馈控制策略的有效性。
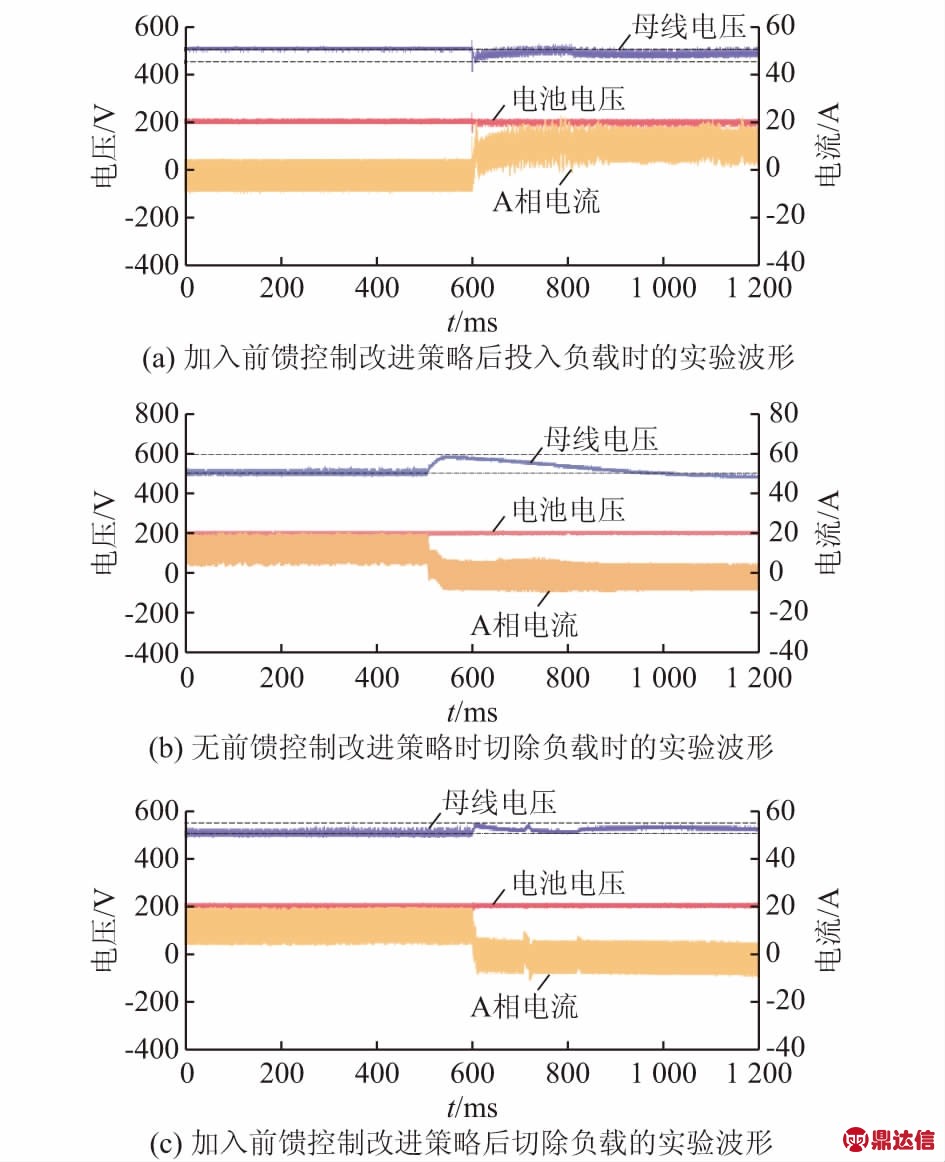
图6 前馈控制改进策略实验波形
Fig.6 Experiment waveforms of improved feedforward control strategy
5 结语
低压直流配电网中,考虑网内负荷的多元化与用电的随机性,直流母线电压会因负载的投入与退出而产生波动,在孤网模式下严重时会影响敏感负荷的供电。为解决这一问题,本文针对敏感负荷区的SC控制策略展开研究,并进行了相关实验。研究表明,将电压偏差引入电流内环的前馈控制策略可有效提升储能对母线电压偏差的响应速度以减小电压恢复时间;通过在前馈环中设置合理的前馈保持时间可使三相电流对电流指令有效跟随,从而避免母线电压在前馈区与非前馈区之间往复切换以改善暂态响应过程。但是本文提出的前馈控制策略针对SC定电压控制而设计,对于其他控制方式的适用性需进一步探讨。


