
这些就是全世界的神经科学家为之奋斗的最新目标。用多种方法直接观察动物脑中的电活动,研究各种认知行为产生什么样的电活动。并且站在整体角度,运用最新的方法剖析大脑的神经网络。只有将大脑的神经网络充分解析出来,我们才有可能知道认知、思考与意识的底层逻辑。
d) 负载惯量< 3倍电机转子惯量JM (3×3.7×10-6=1.11×10-5 kg/m2)。
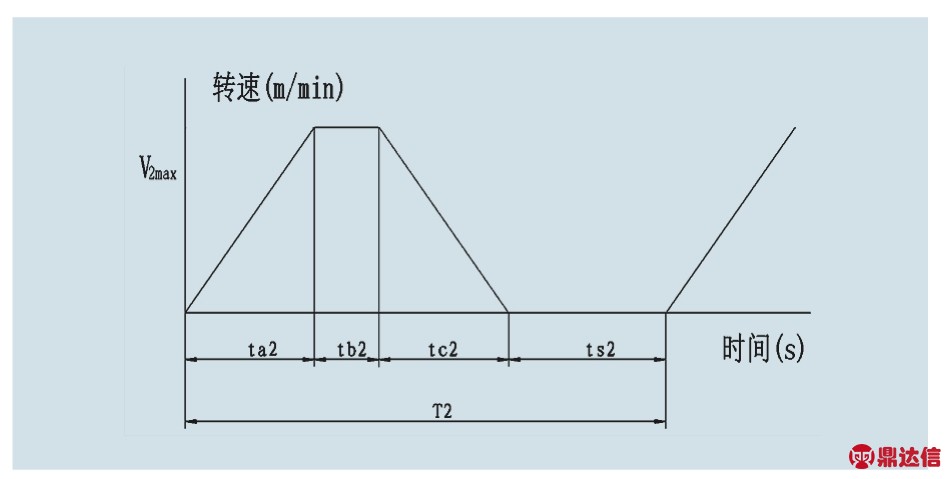
图7 电动执行器运转曲线图
已知:运动部件质量W为7.6kg,摩擦系数μ=0.1,移动距离为S1为1cm,丝杠螺距P为0.5cm,驱动系统效率η为1,轴径D为1.2cm, 轴长L为35cm,轴密度ρ为7.8×10-3kg/cm3。
(1)由公式S1=V1max×(ta+tb)得到最大进给速度V1max=0.068m/s,伺服电机运行最高转速Nmax=Vmax/P= 816 r/min<3000r/min,条件a满足。
(2)换算到电机轴上的负载惯量JL=JB+JW
运动部件的惯性:![]() L=5.56×10-6 kg/m2
L=5.56×10-6 kg/m2
工件惯性 :![]() 10-6 kg/m2
10-6 kg/m2
则 JL=JB+JW=1.04×10-5(kg/m2)<1.11×10-5 kg/m2,条件d满足。
(3)由本伺服系统数值代入负荷力矩公式得到:
上 升 时 可 动 部 分 负 载 转 矩T上==1.72×10-3WP=6.536×10-3(N • m);
下 降 时 可 动 部 分 负 载 转 矩T下==-1.40×10-3WP=-5.32×10-3(N • m);
停 止 时 可 动 部 分 负 载 转 矩T停==1.56×10-3WP=5.93×10-3(N • m);
加 速 力 矩![]() 10-2+6.536×10-3≈6.37×10-2(N • m) (式中取 TL =T上)<0.96N • m,条件 c 满足。
10-2+6.536×10-3≈6.37×10-2(N • m) (式中取 TL =T上)<0.96N • m,条件 c 满足。
(4)减速力矩![]() m)
m)
实际力矩![]() =2.58×10-2(N • m) < 0.32N • m,条件 b 满足。
=2.58×10-2(N • m) < 0.32N • m,条件 b 满足。
通过计算证明,现有上料位硅片分片、取片系统可以满足每秒1片的理论产能。
表2 参数对比表

表3 装片位与上料位运动参数对比表

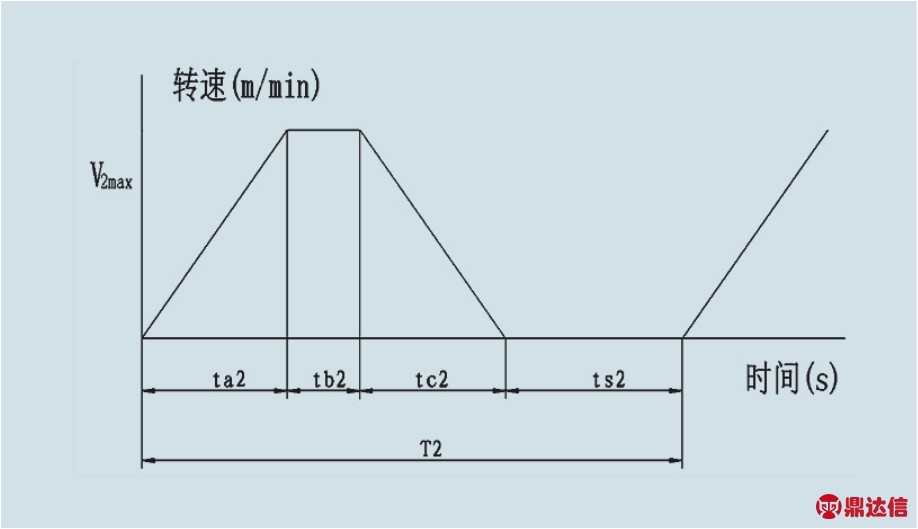
图8 下料位伺服电机运转曲线图
2.2.2 流程2产能分析
流程2电动执行器运动曲线图(图7)中:T2=ta2+tb2+tc2+ts2=1s,(式 中 ts2=ts1=0.51)ta2+tb2+tc2=0.49s。
已知电动执行器参数:最大加速度0.7 m/s2,最大速度1 m/s。取tb2=0s,ta2 +tc2= 0.49s代入公式S=at2/2得到S=84mm<行程300mm要求。此机构无法满足每秒1片的产能要求。
已知运动部件质量为2.4Kg,由上述已知条件分析得到所需系统参数:加速度最小5.4m/s2;推力最小15.56N(安全系数1.2);系统速度V2max最小1.03 m/s。
按产能要求,选择效率更高的单轴机器人(主要参数见表2)。
选取单轴机器人加速度6m/s2,则实际需要推力为14.4N,安全系数18/14.4=1.25>1.2满足要求。选取V2max为1.2 m/s,计算得到ta2=tc2=0.2s;tb2=0.05s 则 ta2+tb2+tc2=0.45s,T2=0.45+0.51=0.96<1s,满足每秒1片的产能要求。
2.2.3 流程3产能分析
由于装片机为双装片工位,单侧产能每秒2片就能达到整机每秒1片的产能要求。
选择伺服电机ta3=tb3=tc3的运行方式(见图8)。ts3主要包括硅片传输入篮具时间与等待硅片时间。已知传输带运行速度为0.26m/s,硅片装篮距离为0.2m,则装篮时间为0.77s。参考流程1取伺服电机推动篮具上升最大速度V3max= 0.02m/s,加速度a3=0.2m/s2。由运行距离为4.7mm,得到ta3=tb3=tc3=0.1175s则ts3=2-0.1175×3=1.6475s,等待硅片时间为1.6475-0.77=0.8775s。
对比装片位运动机构与上料位运动机构(如表3),在结构与器件相同的情况下显然装片位伺服电机能够满足机构运行要求。
综上所述,通过对全自动硅片装片机三个循环流程的分析得到,只需在原有结构基础上用单轴机器人替换电动执行器,即可将装片机产能由1800片/小时提升到3200片/小时。
3 结束语
通过努力,中国光伏装备产业已具有一定的规模和水平。国内一流光伏企业真正认识到没有国产设备的支撑,中国的光伏企业将丧失最主要的成本竞争优势。国内装备制造商也清醒的认识到作为技术要求要略低一些的光伏设备也正是国内企业可大有作为的中低端设备领域。太阳电池产业的竞争归根到底是成本的竞争,国产装备的发展符合降低成本的大方向,随着性能的不断提高,前景会更加美好。


