
摘要:以惯性压电驱动器的关键部件——悬臂式压电双晶片振子为研究对象,探讨了悬臂式压电双晶片振子的夹持长度变化对其动态特性的影响规律。首先,建立了悬臂式压电双晶片振子静态参数方程和动力学模型。然后,应用matlab软件仿真分析了夹持长度变化对悬臂式压电双晶片振子的端部位移幅值和惯性加速度幅值的影响。最后,分别测试了悬臂式压电双晶片振子在不同夹持长度下的端部位移幅值以及惯性加速度幅值。结果显示:驱动电压为10 V,频率为11 Hz,悬臂式压电双晶片振子的夹持长度在9~20 mm内变化时,其端部位移幅值最大为66.2μm,产生的惯性加速度幅值最大为10.2 ms-2。仿真和试验结果表明:激励电场相同时,随着悬臂式压电双晶片振子的夹持长度增大,其端部位移幅值会变小,而其产生的惯性加速度会变大。
关 键 词:压电双晶片振子;悬臂式双晶片振子;夹持长度;动态特性
1 引 言
惯性压电驱动器是利用压电元件产生的惯性冲击力来实现驱动控制或运动的一类新型压电驱动装置[1]。由于压电元件具有机构刚度大、位移分辨率高、频率响应快、无电磁干扰以及结构紧凑等优点[2],得到了国内外相关研究人员的相当重视而具有良好的应用前景。目前已广泛应用于航空航天、精密工程、医疗等领域[5]。
国内外学者对惯性压电驱动器做了大量的理论和试验研究,但对于惯性压电驱动器的关键部件——悬臂式压电双晶片振子特性的研究较少。Matthias研制了一种新型摩擦力可调节的压电惯性驱动器,步长达到20μm[3];刘卫华等研制的一种惯性式压电步进电机,步长达到2μm[4];温建明等研制了一种新型摩擦变化式压电惯性驱动器,步长达到7.5μm[5];Wei Gao等研制了一种新型直线-旋转精密定位工作台,旋转和直线运动最大速度分别为10.5 r/min和16 mm/s,最大行程分别为3 600和12 mm[6];Takuma等人研制了一种新型直线惯性压电驱动器,速度最大为0.28 m/s[7]。在惯性压电驱动器的关键部件--悬臂式压电振子的特性研究方面,王庆明等研究了悬臂式弯曲元件性能,主要分析了压电元件的几何尺寸与其动态特性的关系[8]。鄂世举等研究了压电弯曲元件尺寸对其特性的影响,主要对压电元件的长度对其静、动态特性的关系进行了试验研究[9]。但是目前尚无有关压电双晶片振子的夹持长度变化对其动态特性影响的研究报道。
对此,本文以惯性压电驱动器的关键部件——悬臂式压电双晶片振子为对象,通过建立悬臂式压电振子静态参数方程和动力学模型,对悬臂式压电双晶片振子的端部位移幅值和惯性冲击力幅值进行仿真分析,探讨了悬臂式压电双晶片振子夹持长度变化对其端部位移幅值和其产生的惯性冲击力的影响规律,为提高压电惯性驱动性能研究提供了参考依据。
2 悬臂式压电双晶片振子的静态参数方程
压电双晶片振子由2个压电陶瓷晶片和1个金属基板构成。悬臂式压电双晶片振子是指压电双晶片振子的夹持方式为一端固定,另一端处于自由状态的情形。在静态电场的激励作用下,悬臂式压电双晶片振子会产生向上(或向下)的弯曲变形。本文主要以图1所示的悬臂式压电双晶片振子为研究对象,首先建立悬臂式压电双晶片振子的静态方程。
压电振子总长为L,压电陶瓷长度为L2,夹持长度为L0,电陶瓷厚度为tp,基板厚度为tm。在使用压电双晶片振子的过程中可以改变其夹持长度L0,但压电振子长度L和压电陶瓷的长度L2为定值。为方便研究,令L1=L-L0-L2。
图1 悬臂式压电双晶片振子结构图
Fig.1 Structure diagram of cantilever bimorph
以压电振子基板中心层面作为x轴,压电振子夹持端面作为y轴(如图1)。在0~L1段只有金属层,在L1~L2段有压电层和金属层。在静态电场的作用下,L1~L2段金属层和压电层的弯矩方程[8]分别为:


式中:k为电场作用下压电双晶片振子的曲率,Em为金属基板弹性模量,Ep为压电陶瓷弹性模量,d31为压电常数,E3为静态电场电压值,w为压电双晶片振子宽度。
据式(1)得0~L1段金属层弯矩方程为:
在0~L1段金属层与L1~L2段金属层弯矩之比为L1/L2。式(1)、(2)和式(3)相加得压电双晶片振子弯矩M为:
对于悬臂式压电双晶片振子,无外部力矩作用,即M=0,则曲率k为:
3 悬臂式压电双晶片振子动态特性
悬臂式压电双晶片振子由于结构简单、成本低和变形量大等优点,已成为了大多数的惯性压电驱动器的驱动源。悬臂式压电双晶片振子的动态特性对惯性压电驱动器性能的影响很大。为研究提高惯性压电驱动器的性能提供理论依据,本文建立了悬臂式压电双晶片振子动力学模型,初步探讨了悬臂式压电双晶片夹持长度变化对其动态特性的影响。
3.1 悬臂式压电双晶片振子动力学模型
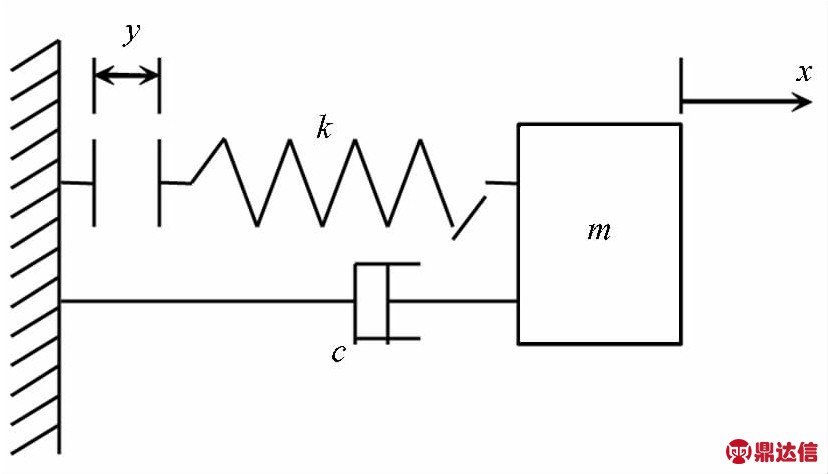
根据对悬臂式压电晶片振子的理论分析,建立了如图2所示自由端带有集中质量的悬臂式压电双晶片振子的简化动力学模型。m为冲击质量块的质量;k为作用在压电双晶片自由端的外力与其静挠度的比值;x为冲击块质量的移动坐标;c为压电双晶片的阻尼;y为电压V作用下压电双晶片自由端的静态位移值。
图2 压电双晶片振子动力学模型
Fig.2 Dynamical model of cantilever bimorph
根据动力学模型,建立在动态电场下的自由端带有集中质量的悬臂式压电双晶片的动力学方程为:
3.2 悬臂式压电双晶片振子端部位移的幅值分析
根据悬臂式压电双晶片动力学方程,得到在周期性动态电场VC作用下悬臂式压电双晶片振子自由端位移幅值[10]为:
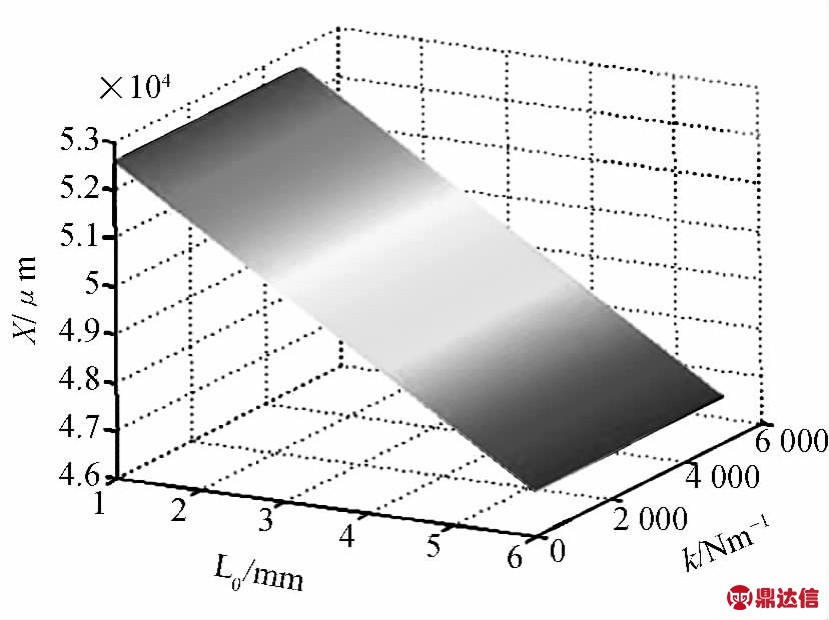
利用Matlab软件对式(14)进行仿真,分析悬臂式压电双晶片振子端部位移幅值X与夹持长度L0、刚度k的关系,仿真结果如图3所示。
图3 端部位移幅值X与夹持长度L0、刚度k的关系
Fig.3 Displacement amplitude vs.clamping length and stiffness
从仿真结果得到,在驱动电场相同的条件下,悬臂式压电双晶片振子的端部位移幅值X受刚度k的影响较小,并随着夹持长度L0的增大而减小。
3.3 悬臂式压电双晶片振子产生的惯性加速度的幅值分析
在动态电场的作用下,悬臂式压电双晶片振子在弯曲运动的过程中,主要受到以下3个力:压电双晶片端部执行力Fbl,压电双晶片弹性恢复力Ft=kx,阻尼力Fz=cv2。
悬臂式压电振子运动模型如图4所示,悬臂式压电双晶片振子在弯曲运动的过程中,位置A为平衡位置,位置B和位置C为端部位移最大位置。在周期性电场作用下,悬臂式压电双晶片振子弯曲运动也具有周期性,以平衡位置A为分界点,悬臂式压电双晶片振子在A、B位置之间和A、C位置之间的运动过程是等效的。这里以悬臂式压电双晶片振子在A、B位置之间的运动过程为例来分析悬臂式压电双晶片振子在周期性电场作用下的弯曲运动过程。
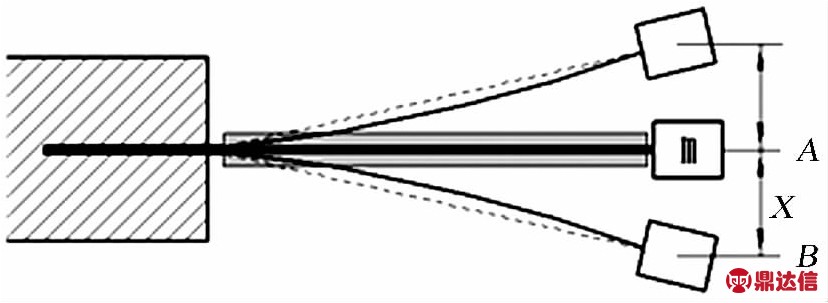
图4 悬臂式压电振子运动模型图
Fig.4 Motion model of cantilever bimorph
在A、B位置之间的运动过程可分为过程A~B和B~A。过程A~B为由位置A向位置B运动,压电双晶片弹性恢复力为阻碍力,阻碍其运动;过程B~A为位置B向位置A运动,压电双晶片弹性恢复力为主动力,促使其运动。因此过程A~B和B~A压电双晶片振子的受力分别可以表示为:
悬臂式压电双晶片振子在位置B时的端部位移最大,则其受到的弹性恢复力Ft也最大,根据式(9)可知悬臂式压电双晶片振子在位置B时的端部执行力最大。悬臂式压电双晶片振子在位置B速度为0,即其受到的阻尼力Fz大小也为0,因此悬臂式压电双晶片振子在B~A过程中至位置B时所受到合力值最大。悬臂式压电双晶片振子产生的惯性冲击力与其所受到的力大小相等,方向相反。
另外,悬臂式压电双晶片振子在B~A过程中至位置B产生的惯性冲击力最大,悬臂压电双晶片振子在弯曲运动的过程中产生的惯性冲击力的幅值F表示为:
式中:Fbl为悬臂式压电双晶片振子在端部位移最大时的端部执行力。

将式(13)代入(9)得:
将L1=L-L0-L2代入式(20),再将式(20)代入(19)得:

则在周期性电场Vc的激励作用下,悬臂式压电双晶片振子在弯曲运动过程中产生的惯性加速度的幅值为:

利用Matlab软件对式(22)进行了仿真,分析了悬臂式压电双晶片振子产生的惯性加速度幅值a与夹持长度L0、刚度k的关系,仿真结果如图5所示。
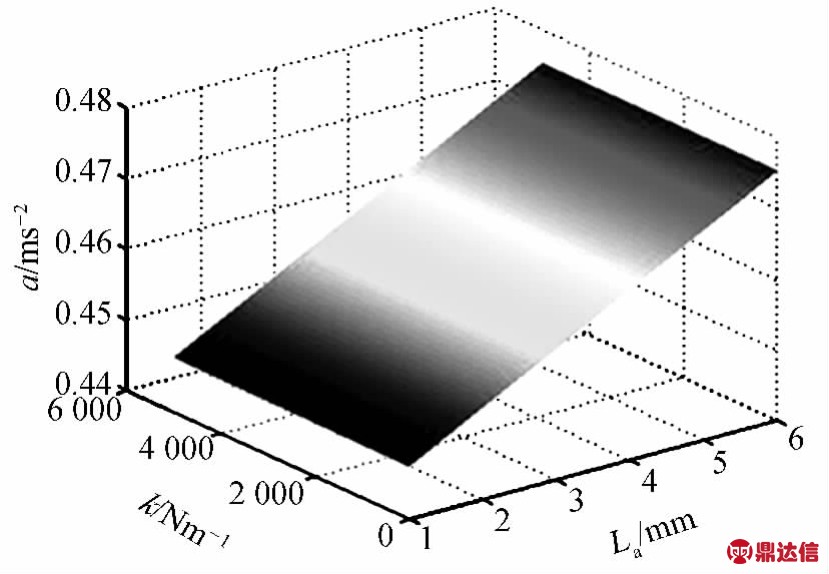
图5 惯性冲击力幅值F与夹持长度L0、刚度k的关系
Fig.5 Amplitude of inertial impact vs.clamping length and stiffness
仿真结果得到,在驱动电场相同的条件下,悬臂式压电双晶片产生的惯性加速度幅值a受刚度k的影响较小,随夹持长度L0的增大而增大。
4 试验测试研究
为验证悬臂式压电双晶片振子在不同夹持长度下的动态特性理论分析成果,采取了非接触的测量方式分别对悬臂式压电双晶片振子在不同夹持长度下的端部位移幅值进行了测试。利用加速度传感器对悬臂式压电双晶片振子在不同夹持长度下产生的惯性加速度幅值进行了测试。制作了如图6所示的压电双晶片,基板厚度为0.3 mm,压电陶瓷晶片厚度为0.2 mm。
试验采用的主要设备包括33522A型任意波形发生器,HVP-300型功率放大器,LKG5001V型激光位移传感器以及LK-H020型激光侧量头(测量头工作距离为20 mm,测量范围±3 mm,分辨率为0.01μm),SD-1441型电荷放大器,YD-8型加速度传感器和L固纬GDS-1102型示波器 。
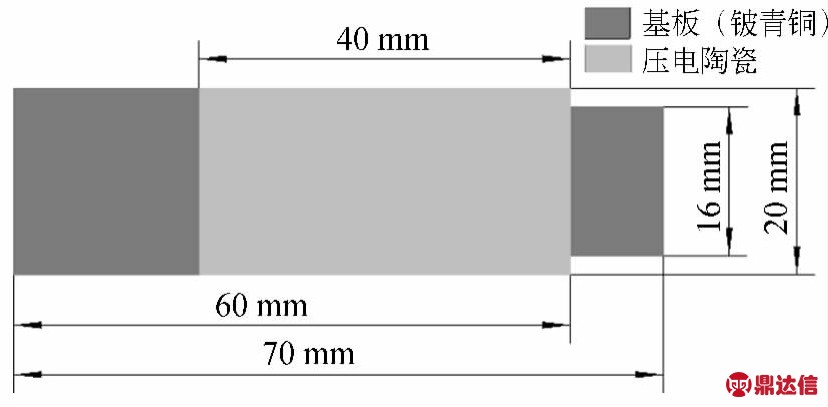
图6 压电双晶片模型
Fig.6 Model of bimorph
4.1 悬臂式压电双晶片端部位移幅值测试试验
4.1.1 悬臂式压电双晶片端部位移幅值测试系统
为验证悬臂式压电双晶片振子夹持长度变化对其端部位移幅值的影响规律,测试了悬臂式压电双晶片振子在不同夹持长度下的端部位移幅值。由于悬臂式压电双晶片振子在电信号激励下的变形量较小,即其输出位移的量级为微米级,如果外加接触性的位移测试传感装置将影响测试结果,所以采用非接触式的测量方式进行测试,以提高测试的精度[11]。
将信号发生器产生的电压信号经功率放大器放大后施加到悬臂式压电双晶片振子上,利用激光测位移传感器的激光测量头采集悬臂式压电双晶片振子的端部位移,并将采集到的信号传输至位移传感器的控制器,将采集的数据传输至计算机中相应的软件中,记录测试数据。试验测试系统如图7所示。

图7 压电振子端部位移幅值X测试系统图
Fig.7 Experimental set for amplitude of bimorph
4.1.2 悬臂式压电双晶片振子端部动位移幅值测试结果
试验中施加在悬臂式压电双晶片振子的激励信号为频率11 Hz、峰值10 V的方波。分别测试了夹持长度为9~20 mm的悬臂式压电双晶片振子的端部位移幅值,悬臂式压电双晶片振子的夹持差采样间隔为1 mm,测试结果如图8所示。
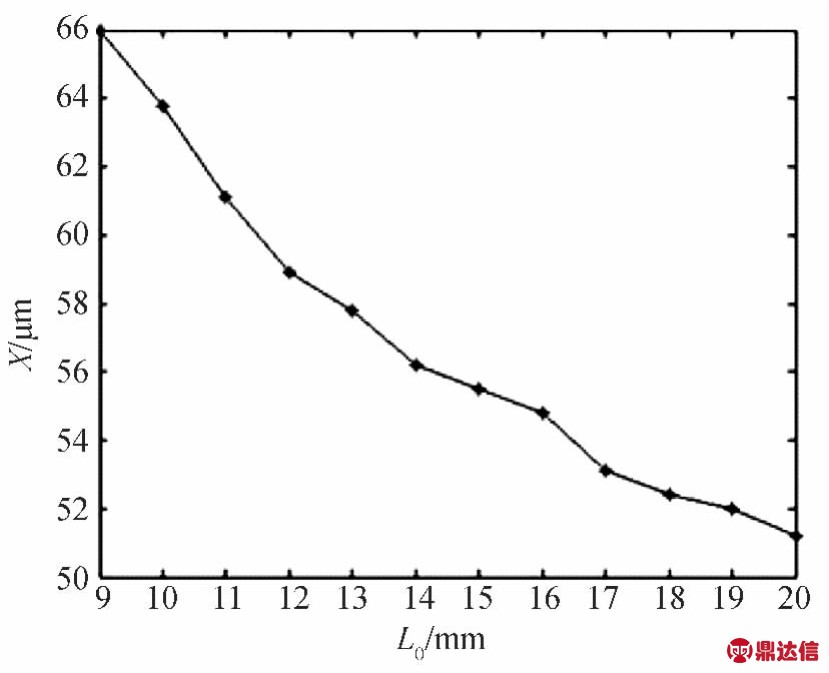
图8 端部位移幅值X与夹持长度L0关系
Fig.8 Blocking force vs.clamping length
从测试结果可知,在驱动电场相同的条件下,悬臂式压电振子端部位移幅值X随其夹持长度L0的增大而减小。
4.2 悬臂式压电双晶片产生的惯性加速度幅值测试试验
4.2.1 悬臂式压电双晶片产生的惯性加速度幅值测试系统
为验证悬臂式压电振子夹持长度变化对其产生惯性冲击加速度幅值的影响规律,测试了悬臂式压电振子在不同夹持长度下的产生惯性加速度幅值。利用加速度传感器测试悬臂式压电双晶片振子在不同夹持长度下的惯性加速度。测试过程中,将信号发生器产生的电压信号经功率放大器放大后施加到悬臂式压电双晶片振子上,将加速度传感器粘贴在压电振子端部,加速度传感器将采集到的信号通过电荷放大器放大,再传递到示波器。试验测试系统如图9所示。

图9 惯性加速度幅值测试系统
Fig.9 Experimental set for inertial acceleration amplitude
4.2.2 悬臂式压电双晶片振子的惯性加速度幅值测试结果
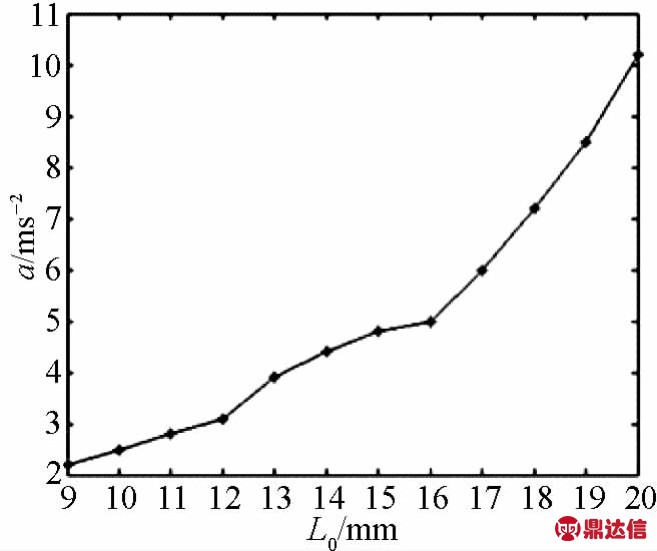
图10 惯性加速度幅值与夹持长度L0关系
Fig.10 Inertial acceleration vs.clamping length
试验中施加在悬臂式压电双晶片振子激励信号为频率11 Hz、峰值10 V的方波。分别测试了夹持长度9~20 mm的悬臂式压电振子产生的惯性冲击力幅值,悬臂式压电振子的夹持长度采样间隔为1 mm。试验测得在悬臂式压电振子产生的惯性加速度的幅值与夹持长度L0关系,结果如图10所示。
从测试结果得,在驱动电场相同的条件下,悬臂式压电双晶片振子产生的惯性加速度的幅值随夹持长度L0的增大而增大。
5 结 论
本文以悬臂式压电双晶片振子为研究对象,探讨了悬臂式压电双晶片振子的夹持长度变化对其动态特性影响的规律,得到以下结论。
(1)建立了悬臂式压电双晶片振子动力学模型,推导了悬臂式压电双晶片振子的静态参数方程,利用Matlab软件对悬臂式压电双晶片振子夹持长度变化对其端部位移幅值和产生的惯性加速度幅值的影响进行了仿真。
(2)当驱动电压为10 V,频率为11 Hz时,夹持长度L0在9~20 mm内变化的悬臂式压电双晶片振子(总长L=60 mm)的端部位移幅值最大为66.2μm,产生的惯性加速度幅值最大为10.2 m·s-2。
(3)仿真和试验结果均表明:在驱动电场相同的条件下,随着悬臂式压电双晶片振子的夹持长度增大,其端部位移幅值会变小,其产生的惯性加速度幅值会变大。本文的研究为提高压电惯性驱动性能研究提供了参考依据。


